it is my pleasure to share the discovery of how the albatross uses its
TRANSCRIPT

1
It is my pleasure to share the discovery of how the albatross uses its dynamic soaringtechnique to remain aloft indefinitely on shoulder-locked wings over a waveless sea. Ofcourse the albatross often catches a free ride along the front of a wave, just like the pelicanshere in southern California, but waves travel much slower than the wind, and as we willshow, the albatross travels overall downwind faster than the wind. Indeed, the albatrosscircumnavigates Antarctica several times per year, in as little as 46-days per trip. Only withdynamic soaring can the albatross fly so fast and far.
Our presentation, How Flies the Albatross ~ the Flight Mechanics of Dynamic Soaring, willdraw from several disciplines, primarily aerospace engineering, but also physics,mathematics, computer graphics, paleontology, photography, and even a little poetry, toobserve what the albatross does, and understand how it does it, so that we may take greaterinterest in halting its slide toward extinction.

2
In “The Rhyme of the Ancient Mariner,” the sailor shot the albatross with his crossbow,believing the albatross responsible for the ice-cold storm. This was unfortunate for bothbecause, as the story goes, the albatross was “the bird that made the wind to blow.”Consequently, the ship drifted into the doldrums, and the crew perished from thirst.
Today we are still shooting the albatross, in a manner of speaking. Our crossbows take theform of long-line fishing fleets, floating plastic at sea, and predators introduced to the remoteislands where the albatross breeds. Whereas the albatross has graced our blue planet for 50million years, we so-called “modern” humans appeared only recently, about 0.1-million yearsago. Yet within just the last 0.0001-million years, many albatross species have lost half oftheir population on account of us.
3
Well‐known naturalists, including David Attenborough and Jacques Cousteau, haveobserved and documented how the albatross appears to defy the laws of physics.In this presentation, we will show how the albatross does these things whileadhering, as it must, to the laws of physics.

4
Archaeopteryx was the feathered bird-dinosaur which lived 150 million years ago. Probablyunable to sustain flapping flight, Archaeopteryx may have used its feathered wings to enable agliding attack on its prey, and/or to enhance its running speed by developing flapping thrust (1).
By around 100 million years ago, modern birds were well along their evolutionary path (2). Anearly albatross named Osteodontornis lived between 55 and 5 million years ago. Thisenormous seabird had a wingspan up to 6-meters. We may be surprised to learn that theancestors of Osteodontornis likely shared the ocean skies with Pteranodon. With fossils oftenfound far out at sea, and with chest muscles probably too small to sustain flapping flight,Pteranodon may have originated dynamic soaring, all with its little finger having evolved intothe main spar of its wing.
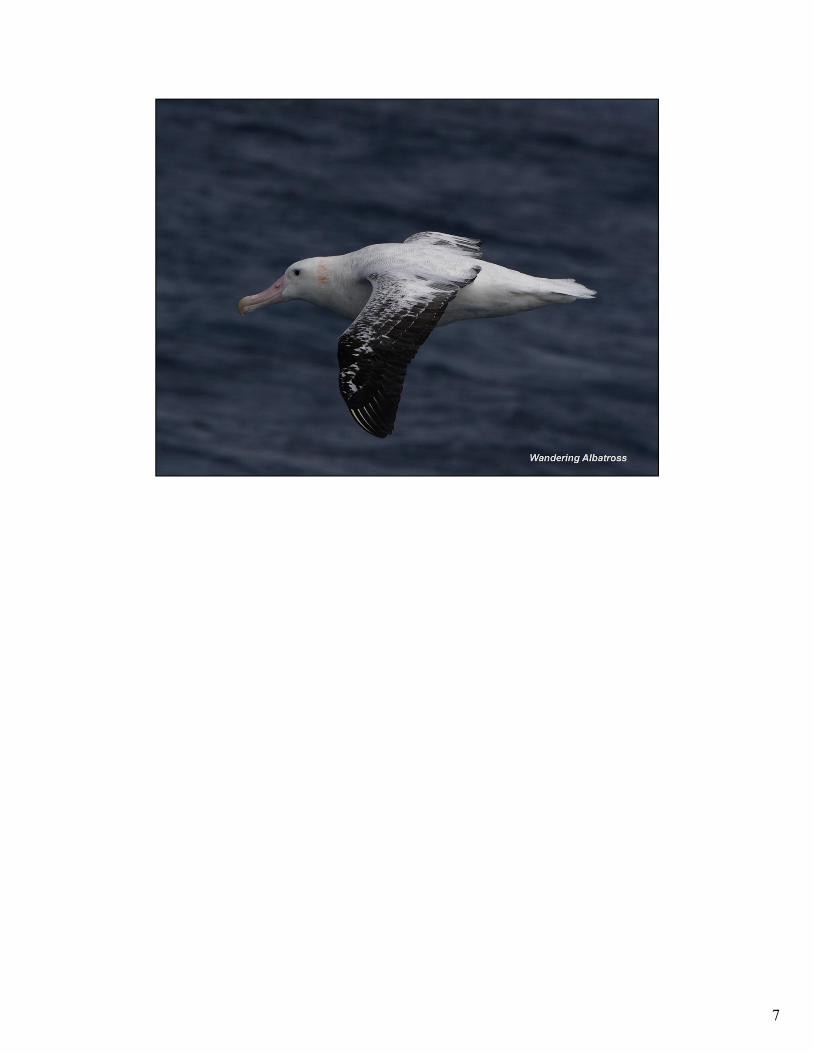
Today, 13 species of albatross grace our blue planet and carry forth the ancient skill ofdynamic soaring. The Wandering albatross, the main subject of our study herein, has a 3.5-mwingspan, the largest of any living bird.
(1) Phillip Burgers & Luis Chiappe, “The Wing of Archaeopteryx as a Primary Thrust Generator,”
Nature, Vol. 399, 1999, p. 60
(2) Joel Carl Welty, “The Life of Birds,” Alfred A. Knopf, 1962, p. 483
(3) Adrian Desmond, “The Hot-blooded Dinosaurs,” Dial Press, 1976, p. 170-183

Other seabirds join the albatross in dynamic soaring, except when the wind fallsbelow a threshold. The giant petrel, particularly its rare “white morph,” can easilybe mistaken for an albatross at a distance. The “tubenose” seabird family, includingthe albatross, petrels, and fulmars, de‐salinate ingested sea water, excreting thesalt from their tubenose.
5

6
7

8

9
Here’s an interesting view, looking up or down (?) at our spaceship Earth. The very thin linearound the globe, a graphical artifact, closely represents the actual thickness of our airsupply. Even including the depth of ocean, the so-called biosphere is not really a sphere; It’sreally a thin and fragile veil, wrapped around the planet.
Throughout the year, the Antarctic Circumpolar Current, or ACC, sweeps around thecontinent, accompanied by a consistent howling and freezing wind, and on occasion hostingthe largest waves on the planet. The northern and southern fronts of the ACC are marked bysharp changes in water temperature, salinity, and concentrations of phytoplankton andzooplankton.
Roughly speaking, the wandering albatross rides the wind above the ACC, although itwanders considerably farther north or south. The albatross uses its dynamic soaringtechnique to travel perhaps 1500 km/day, and according to David Attenborough, often doesso half asleep on the wing. That would include effortless terrain following over a heavingsea, and as we shall show later, pulling a 3-g turn every 10-seconds.
As an adult, every other year the albatross navigates with pinpoint accuracy to the islandwhere it was hatched and, with good fortune, meets or greets its life-long mate to raise asingle chick. Initially, the chick has full-time supervision by one parent, but then for just overa year, the chick is left alone and fed every 5 days as each parent returns separately from a10-day excursion. Then the chick is totally abandoned, and driven by hunger, it lifts off andquickly learns or instinctively implements dynamic soaring. On their maiden flight, manyalbatross fledglings have been seen to disappear over the horizon to begin their first decadetotally at sea. Try locating New Zealand and South Georgia in the satellite photo above.

10

11
Meet “Algebratross,” modeled with equations from beak to tail, and from wingtip to wingtip. Algebratross weighs 11 kg. Its 3.5-m wing has an aspect ratio of 16.
As we shall see, high aspect ratio is essential to reduce drag during high-g turns associated with dynamic soaring.

12

13

14
This is the first of a series of charts intended to explain why the albatross climbsupwind and descends downwind.
When pointed upwind, the albatross of course flies against a headwind. Should thebird encounter a sudden gust increasing the headwind, it would enjoy a suddenincrease of airspeed. This would then constitute a sudden increase in flight kineticenergy since the latter is based on airspeed, and not groundspeed.
When the albatross flies downwind, it flies of course with a tailwind. But here it will flywith about the same airspeed as before, so its groundspeed will be relatively high. Ifthe albatross then encounters a sudden tailwind gust, its airspeed would besuddenly reduced. Conversely, if the albatross encounters a sudden reduction oftailwind, it will enjoy a sudden increase of airspeed.
In either of the above cases, the groundspeed remains momentarily constant as theairspeed undergoes a sudden change.

15
Let’s say we are driving our car at 90 km/hr with the moonroof open. Just beneaththe moonroof we hold a model airplane. Although the model at this point is travelingat 90 km/hr it has no airspeed, and thus no usable kinetic energy, relative to the air inthe car. Were we to let go of the model it would fall to the floor of the car. If, however,we were to raise the model just above the moonroof, it would suddenly gain 90 km/hrof airspeed and the corresponding amount of kinetic energy. Once released, themodel would convert its newfound kinetic energy into potential energy by climbinghigh in the sky.
Therefore, kinetic energy for flight must be based on airspeed, not groundspeed.Also, we have in effect applied a simple two-step finite model of the wind profile, andthis reveals the essence of dynamic soaring: climbing against the wind profileconverts the increase of windspeed to an increase of airspeed, thus providing akinetic energy gain.

16
The previous example represented a single‐step wind profile. Here, we progress to a multi‐stepwind profile, where the albatross gains energy immediately upon upwind ascent into eachfaster wind layer, then losing a portion of its energy to drag within that layer. Upon reaching thetop of the climb, the energy gain with dynamic soaring can offset the energy lost to drag. Butthe albatross must next turn and descend downwind. Will it now gain or lose energy? As itturns out, downwind descent provides gains in both airspeed and kinetic energy because thealbatross encounters a decreasing tailwind upon descent into each lower and slower windlayer. Thus, in each new layer, it finds itself suddenly flying faster than the local airmass. Finally,at the bottom of its cyclic trajectory, the albatross flies briefly across then wind, thus losingenergy to drag, but then it quickly turns and climbs back into the wind to repeat the cycle witha balanced energy budget.
Once we understand that movement across a shear layer or wind gradient into an increasing headwindor decreasing tailwind yields an energy gain, we are in position to understand that dynamic soaring canalso be accomplished, largely at fixed elevation, given a sufficient horizontal gradient of horizontalwind. Whereas the albatross must move vertically in accordance with the Dynamic Soaring Rule (DSR)to exploit as it does the vertical gradient of horizontal wind, an aircraft exploiting a horizontal gradientof horizontal wind must move horizontally in accordance with a "horizontal‐equivalent" of the DSR.Such a gradient is found on a windy day at any fixed elevation surrounding a skyscraper, but perhapsmore usefully at high altitude along the edge of the jet stream. Here, an aircraft might soar dynamically,largely at fixed elevation, by alternately gliding obliquely into and against the stronger wind, and thendownstream obliquely into the weaker wind. Of course, we can also expect strong vertical gradients toreside at the top and bottom edges of the jet stream. Are sufficient gradients of either type available athigh altitude? Only measurements will tell.

Let’s now study a real, and continuous, wind profile. Although the “boundary layer”shape looks quite familiar, we may be surprised to learn that its height is perhaps20‐meters. With the wind profile now shown as continuous, we conclude that thealbatross uses the local gradient (du/dz) of the wind profile to maintain dynamicsoaring. Exchanging kinetic and potential energy in each zoom maneuver, thealbatross flies 90 km/hr down along the water, and 60 km/hr at the top of the loop.
By now, we see that dynamic soaring is somehow providing a thrust which overalloffsets the drag. Let’s next quantify that thrust, which as you might expect, isdetermined by both the wind gradient (du/dz) and the orientation of the albatross,relative to the wind.
17
18

19
We are now almost ready to quantify the forces associated with dynamic soaring.However, we must first review the maneuver angles. These will affect the quantity anddirection of dynamic soaring forces. Lets first imagine that the albatross, beforemaneuvering, points directly upwind with wings level. At this point, we set the heading,pitch, and roll angles to zero.

20
Next the albatross yaws off the wind to the heading angle (psi).
This motion takes place within a horizontal yaw circle.
After the yaw, the wingtips form a pitch axis A-A

21
The albatross and airspeed vector together pitch up to the flight path angle, gamma. This motion takes place within a vertical pitch circle.

22
Finally, the albatross rolls about the airspeed vector by the angle (phi).
The wingtips sweep out a roll circle which is tilted at the angle (gamma).

23
Now that the albatross has maneuvered into position, we show all the forces, includinglift, weight, drag, and in particular, the dynamic soaring force which constitutes a centralpostulate of our method. As the albatross maneuvers, the presumed dynamic soaringforce vector of magnitude (m du/dt) remains steadfastly level and pointed directlyupwind against the local-layer windspeed (u). Since the wind profile is fixed, only bymoving vertically within that wind profile can the albatross experience the rate (du/dt)and the corresponding dynamic soaring force. But during descent, (du/dt) is negative.Therefore, if the albatross descends directly downwind, the dynamic soaring forcevector will in effect also point downwind, thus providing thrust. This is consistent withour earlier study herein of the effects of a changing headwind or tailwind, where weshowed that an increasing headwind or a decreasing tailwind yields increased airspeedand thus increased flight kinetic energy.
Both the weight (W=mg) and dynamic soaring force (F=m du/dt) are seen to beproportional to the mass (m) of the bird. Note in both cases the general form of IsaacNewton's most famous law. But whereas the weight is proportional to the verticalacceleration (g) due to gravity, representing the vertical gradient (g=de/dz) of potentialenergy (e=gz), the dynamic soaring force is proportional to the horizontal acceleration(du/dt), representing the rate of change of windspeed resulting from vertical motion atvelocity (dz/dt) in a locally-fixed vertical gradient (du/dz) of horizontal wind (u).
If the albatross climbs directly upwind at a very shallow flight-path angle, it will enjoy arate of change (dV/dt) of airspeed approaching (du/dt), whereby the dynamic soaringthrust will approach (T = m dV/dt) and thus, for the stated special conditions, exhibit adirect and perhaps more-easily-comprehended application of Newton's Law.
24
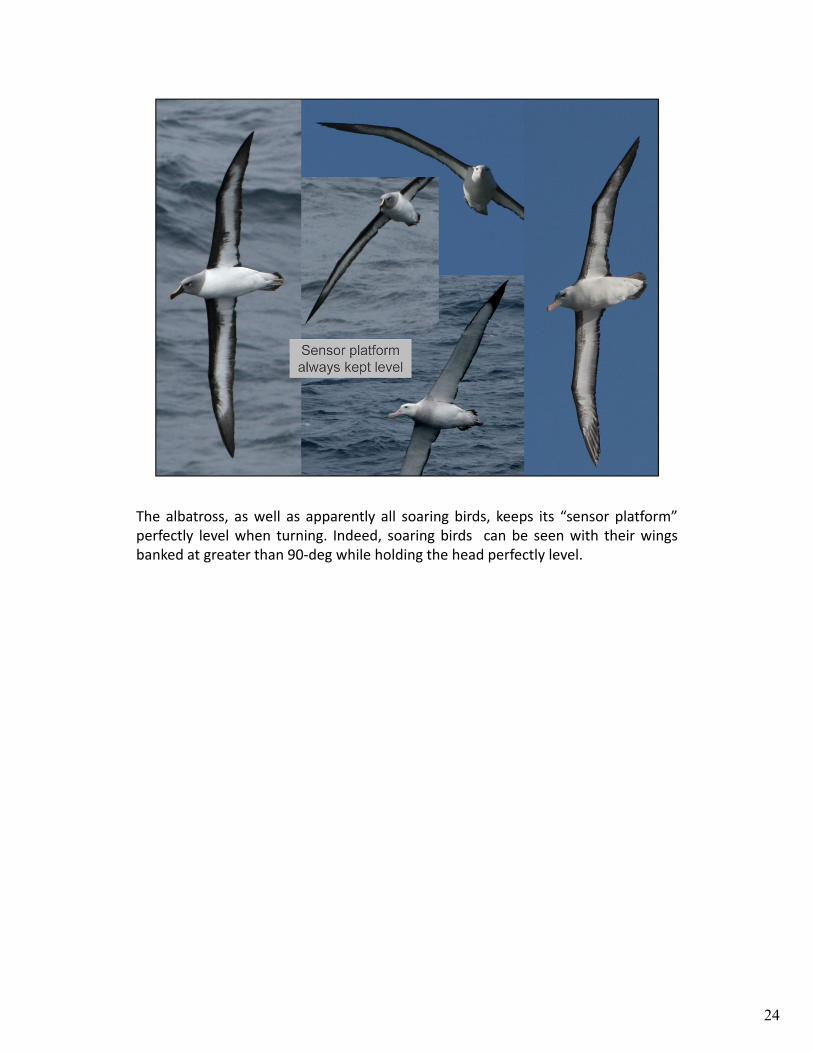
The albatross, as well as apparently all soaring birds, keeps its “sensor platform”perfectly level when turning. Indeed, soaring birds can be seen with their wingsbanked at greater than 90‐deg while holding the head perfectly level.

The dynamic soaring trajectory has nine parameters: time, 3 coordinates, airspeed,windspeed, and 3 maneuver angles. This may leave us asking “where do we start?”The solution is first to prescribe the wind‐profile and then to recognize that thealbatross must follow the dynamic soaring rule, whereby we can schedule the pitchangle with heading. Then, if we schedule one more parameter, such as bank angleversus time, the equations of motion will determine all other parameters when wenumerically and simultaneously integrate the various rates.
25

The best way to simulate the graceful flight of the albatross is to scheduleselected maneuver angles with equations. Naturally, the sinusoidal functions arewell suited for this. Climbing and diving in accordance with the dynamic soaringrule is readily modeled with a sine wave, together with a “sine‐squared” adderwhich allows us to adjust the relative amplitudes of the climb and dive angleexcursions. Also, we can adjust the mid‐point of the maneuver with an auxiliarytime, and we can model the short period where the albatross skims its wingtip onthe water with second auxiliary time which operates on the first. The resultrepresents the flight path angle versus either heading or non‐dimensional time.Usually, the bank angle will be computed in terms of scheduled inputs. In othercases, specifically for the “snaking‐upwind” maneuver, we schedule the bankangle versus non‐dimensional time. With these simple and powerfulmathematical formulations, we need only adjust a handful of parameters by trialand error until the trajectory meets the various constraints, such as skimming thewater, maintaining the energy balance, and traveling overall in the intendeddirection such as downwind, crosswind, or upwind.
26

27
28

A three‐dimensional trajectory can be computed by breaking down themotion into two components, one in a horizontal plane, and the other in avertical plane. At any point the airspeed vector is tangent to the flight path,with a horizontal velocity component given by V cos gamma. We can thenlook down on the trajectory to fit a local horizontal radius of curvature, withattendant turn rate “psi dot.” As shown to us by Isaac Newton, theacceleration toward the center of the horizontal circle is the product ofhorizontal velocity and turn rate. Similarly, we can stand off to the side andfit a roller‐coaster‐loop radius to the motion in a vertical plane. Thecorresponding acceleration toward the center of that loop is then given bythe product of airspeed and pitch rate, “gamma dot.” Last, but not least, thethird acceleration is along the flight path itself, and this is determined bydynamic soaring thrust in relation to drag and the component of weighttangent to the flight path.
29
30
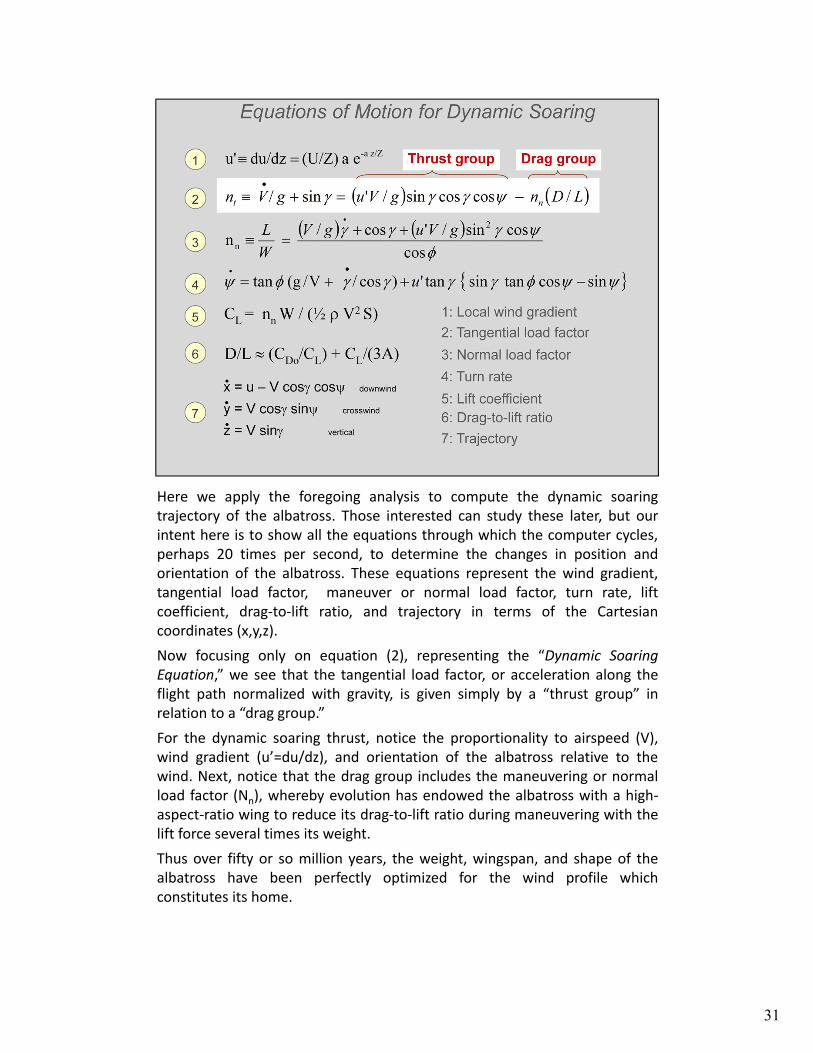
Here we apply the foregoing analysis to compute the dynamic soaringtrajectory of the albatross. Those interested can study these later, but ourintent here is to show all the equations through which the computer cycles,perhaps 20 times per second, to determine the changes in position andorientation of the albatross. These equations represent the wind gradient,tangential load factor, maneuver or normal load factor, turn rate, liftcoefficient, drag‐to‐lift ratio, and trajectory in terms of the Cartesiancoordinates (x,y,z).
Now focusing only on equation (2), representing the “Dynamic SoaringEquation,” we see that the tangential load factor, or acceleration along theflight path normalized with gravity, is given simply by a “thrust group” inrelation to a “drag group.”
For the dynamic soaring thrust, notice the proportionality to airspeed (V),wind gradient (u’=du/dz), and orientation of the albatross relative to thewind. Next, notice that the drag group includes the maneuvering or normalload factor (Nn), whereby evolution has endowed the albatross with a high‐aspect‐ratio wing to reduce its drag‐to‐lift ratio during maneuvering with thelift force several times its weight.
Thus over fifty or so million years, the weight, wingspan, and shape of thealbatross have been perfectly optimized for the wind profile whichconstitutes its home.
31

32

33

34
Here we focus on the circumpolar turn maneuver, with which the albatross makesrapid progress straight downwind, overall. In other words, point (E) is directlydownwind of point (A), where the cyclic trajectory begins. The albatross uses thismaneuver to circumnavigate Antarctica several times per year. Here the wind profile,airborne trajectory, and ground track are drawn to scale, but the albatross is shownat 300% for clarity. Its banked wingtip just clears the water at point (A) where it isturning across the wind.
We’ll follow the dynamic soaring rule by scheduling pitch angle (gamma) withheading (psi). Also, we’ll schedule the turn radius (r, meters) with heading. Everyother parameter in the trajectory then becomes a result of numerically integrating theequations of motion.
Let’s make some interesting observations about this maneuver:
1) Energy lost to drag in crosswind flight is restored overall by the upwind climband downwind descent.
2) The normal load factor (Nn) is 3-g, into the wind at point (B), and 1-g, across thewind at point (C)
3) Lift-to-drag ratio (L/D) remains nearly constant and near-optimal at about 27throughout the maneuver.
4) The tangential load factor (Nt) provides the strongest indication of energy gain orloss.
5) From point (A) to (E) the albatross travels overall downwind 40% faster than thewind itself.

A careful examination of the previous slide reveals apparent sideslip as seenby a stationary observer on the ground. Yet the albatross remains pointedinto the relative wind, thus with "coordinated turning." In the above sketchlooking down at the top of the maneuver, we see that the flight velocityvector projects onto the water below an "airspeed shadow vector" (sunassumed directly above) which, when vectorially combined with the local"true wind" vector (u), yields the groundspeed vector (Vg). The apparentmisalignment of the albatross with its groundspeed vector gives rise to theapparent sideslip. But again, there is no sideslip because the albatross fliesdirectly into the relative wind which, in the two‐dimensional figure above, isaligned with the airspeed shadow vector.
35

36

37
38

39

40

41