introduction to dsge modelling - nicola viegi · simplest case is simple rule ... blanchard-kahn...
TRANSCRIPT

Introduction to DSGE modelling
Nicola Viegi
University of Pretoria

Dynamic
Stochastic
General Equilibrium

Dynamic
tt-1 t+1
expectations

Stochastic
Impulses
Propagation
Fluctuations

Firms
General equilibrium
Households
Monetary
authority

Households
Maximise present discounted value of expected
utility from now until infinite future, subject to
budget constraint
Households characterised by
utility maximisationconsumption smoothing
Households
+
+
+=
+11
1)
1(')('
t
tt
i
tCUE
tCU
πβ
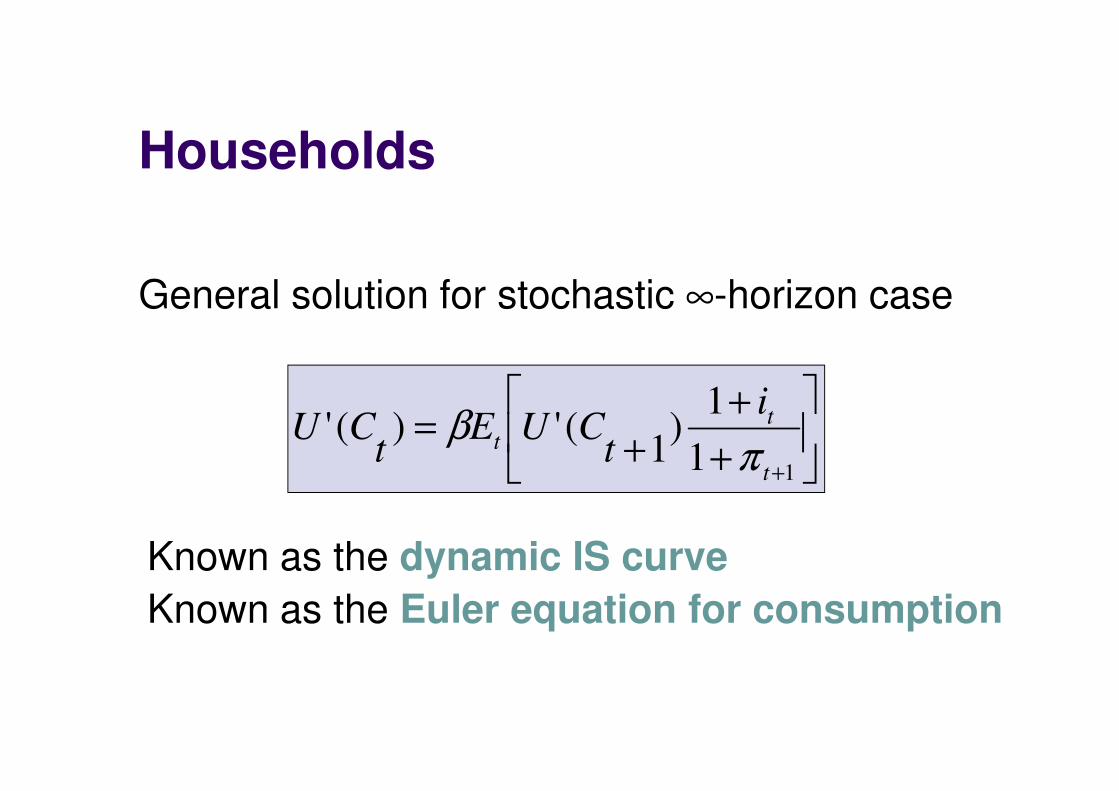
General solution for stochastic ∞-horizon case
Known as the dynamic IS curve
Known as the Euler equation for consumption

Households - intuition
+
+
+=
+11
1)
1(')('
t
tt
i
tCUE
tCU
πβ
it↑ → U’(Ct)↑ → Ct↓ Higher interest rates reduce consumption
Etπt+1↑ → U’(Ct)↓ → Ct ↑ Higher expected future
inflation increases
consumption

Firms
Maximise present discounted value of expected profit from now until infinite future, subject to demand curve, nominal price rigidity and labour supply curve.
Firms characterised by profit maximisationsubject to nominal price rigidity
Nominal price rigidity
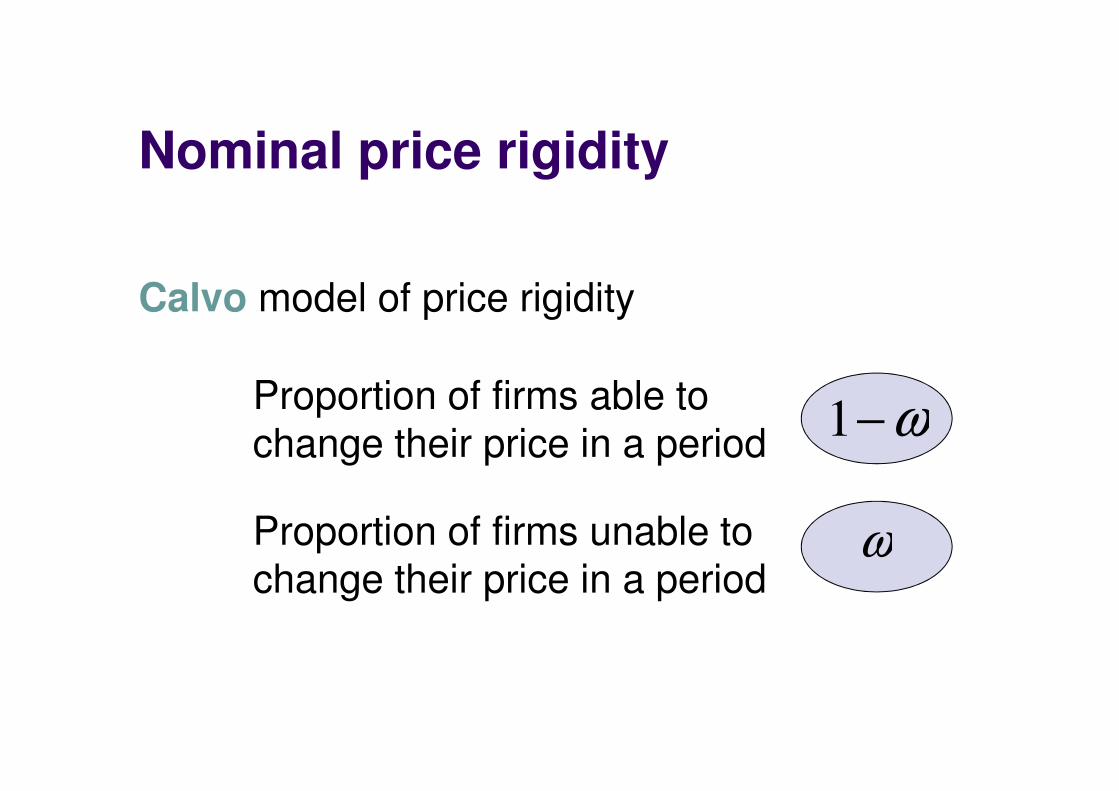
Calvo model of price rigidity
ωProportion of firms unable to
change their price in a period
Proportion of firms able to
change their price in a periodω−1

Firms
)ˆˆ()1)(1(
ˆ1+−
−−= tttt Ex πβπ
βωω
αω
Known as the New Keynesian Phillips curve
Known as the forward-looking Phillips curve
Full solution
Firms - intuition
)ˆˆ()1)(1(
ˆ1+−
−−= tttt Ex πβπ
βωω
αω
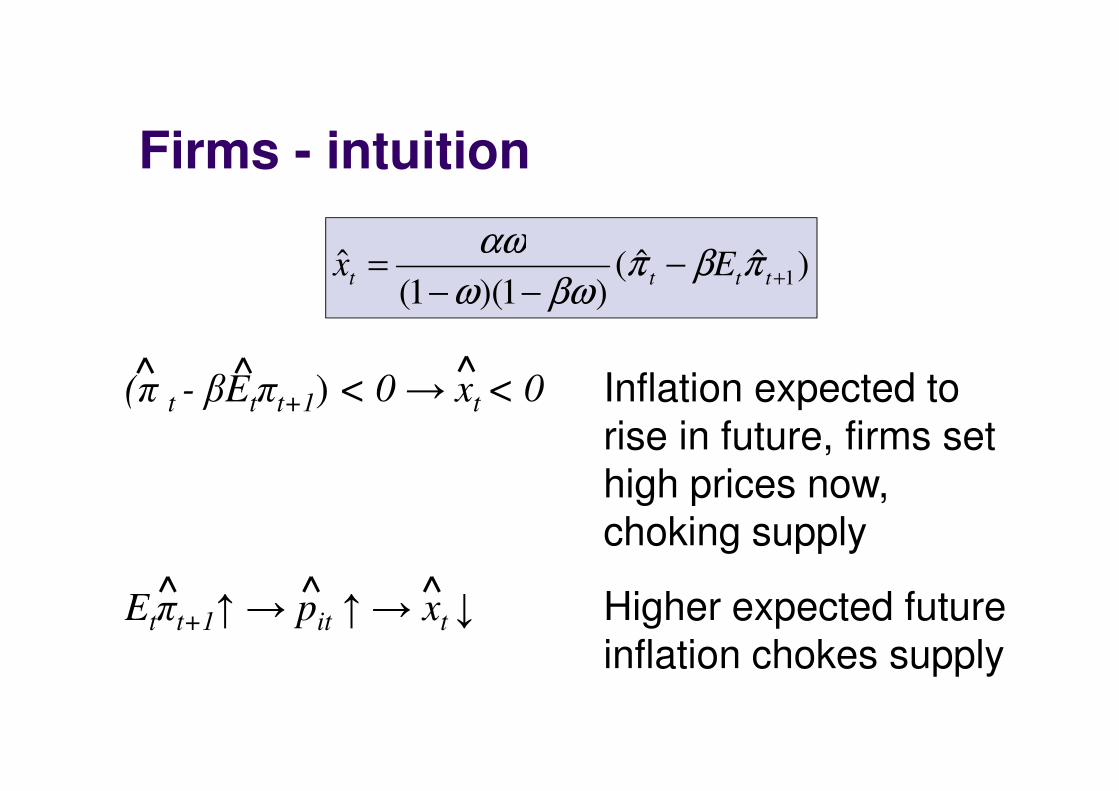
(π t - βEtπt+1) < 0→ xt < 0 Inflation expected to
rise in future, firms set
high prices now,
choking supply
Etπt+1↑ → pit ↑ → xt ↓ Higher expected future
inflation chokes supply
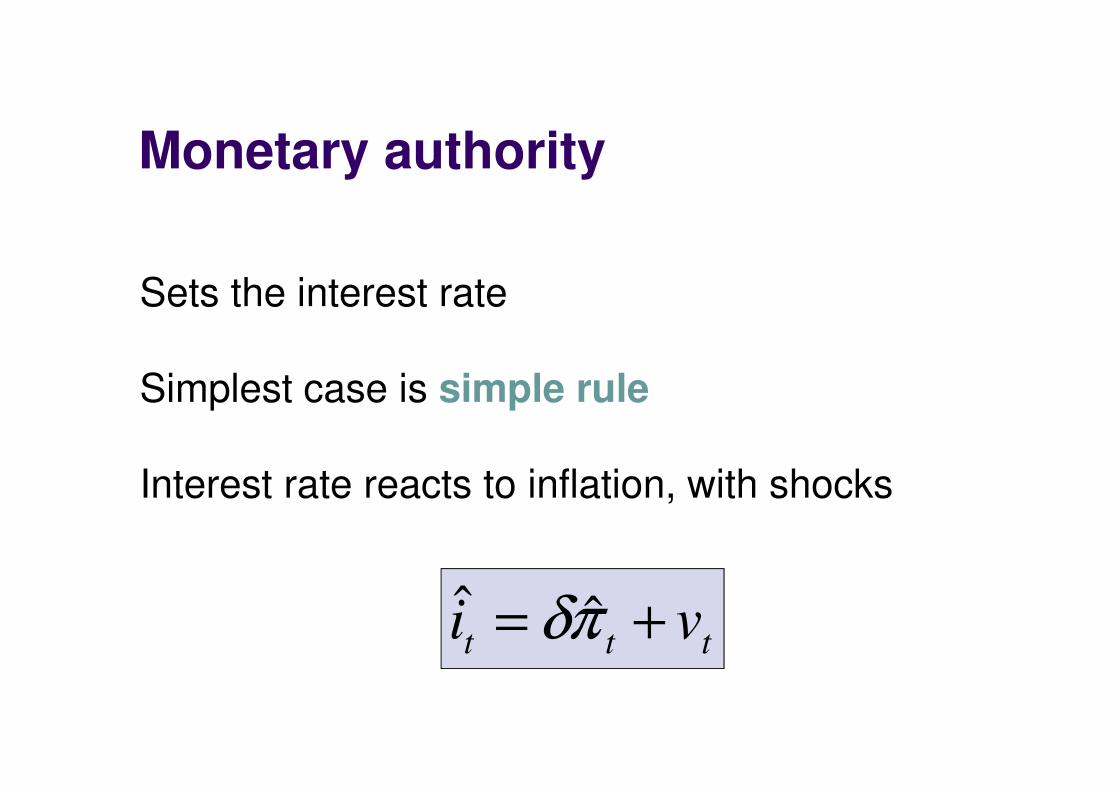
Sets the interest rate
Simplest case is simple rule
Interest rate reacts to inflation, with shocks
Monetary authority
ttt vi += πδ ˆˆ

Firms
Baseline DSGE model
Households
Monetary
authorityttt vi += πδ ˆˆ
+
+
+=
+11
1)
1(')('
t
tt
i
tCUE
tCU
πβ1
ˆ ˆ ˆ( )(1 )(1 )
t t t tx E
αωπ β π
ω βω+= −
− −

Households
Two simplifying assumptions:
CRRA utility functionσ
σ
−=
−
1)(
1
tt
CCU
σ−= tt CCU )('
tt YC =No capital

Firms
Log-linearised DSGE model
Households
Monetary
authorityttt vi += πδ ˆˆ
)ˆˆ(ˆˆ1
1
1 +−
+ −−= tttttt EixEx πσ)ˆˆ()1)(1(
ˆ1+−
−−= tttt Ex ππ
βωω
αω

Calibration
1.5
0.75
0.99
2
α
ω
β
σ
=
=
=
=

Full DSGE model
αω
βωωκ
πδ
κπβπ
πσ
)1)(1(
ˆˆ
ˆˆˆ
)ˆˆ(ˆˆ
1
1
1
1
−−=
+=
+=
−−=
+
+−
+
ttt
tttt
tttttt
vi
xE
EixEx

Alternative representation
tttt
ttttttt
xE
vxExE
πκπβ
σπδσπσ
ˆˆˆ
ˆˆˆˆ
1
11
1
1
1
+−=
++=+
+
−−+
−+
t
t
t
tt
ttv
x
E
xE
+
−=
−−
+
+−
0ˆ
ˆ
1
1
ˆ
ˆ
0
111
1
11 σ
πκ
δσ
πβ
σ
State-space form
10110 ++ += tttt vBXAXEA
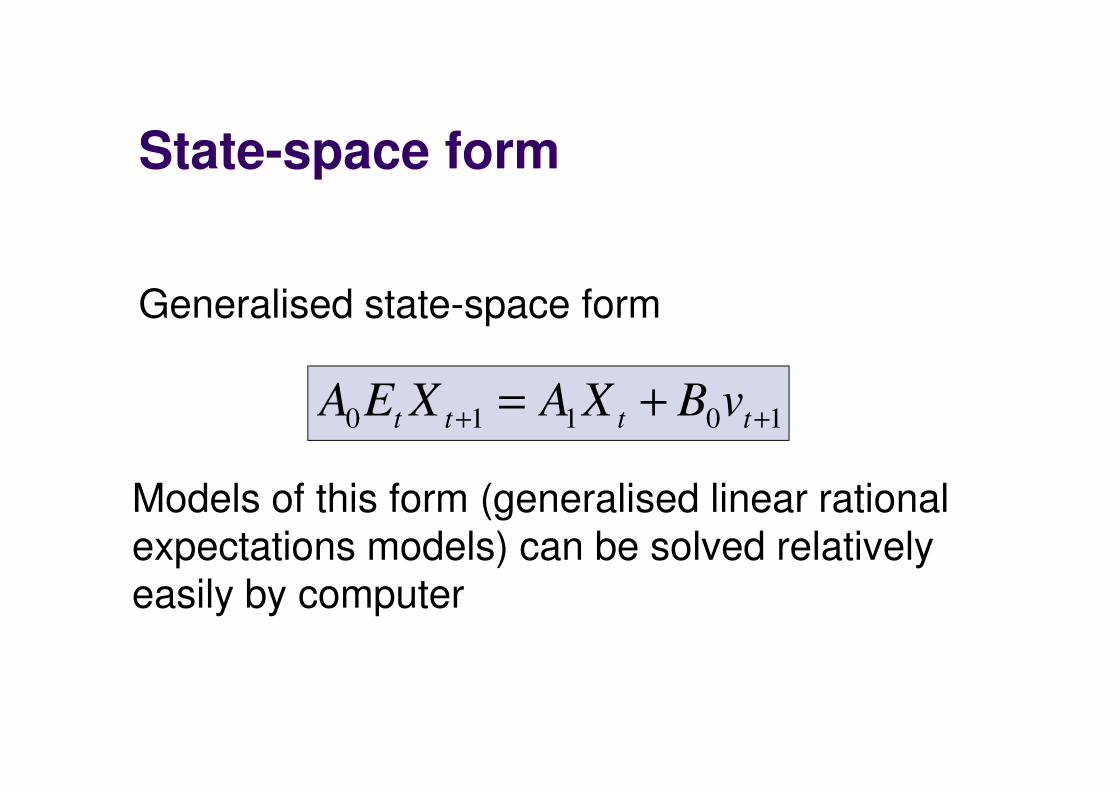
Generalised state-space form
Models of this form (generalised linear rational
expectations models) can be solved relatively
easily by computer
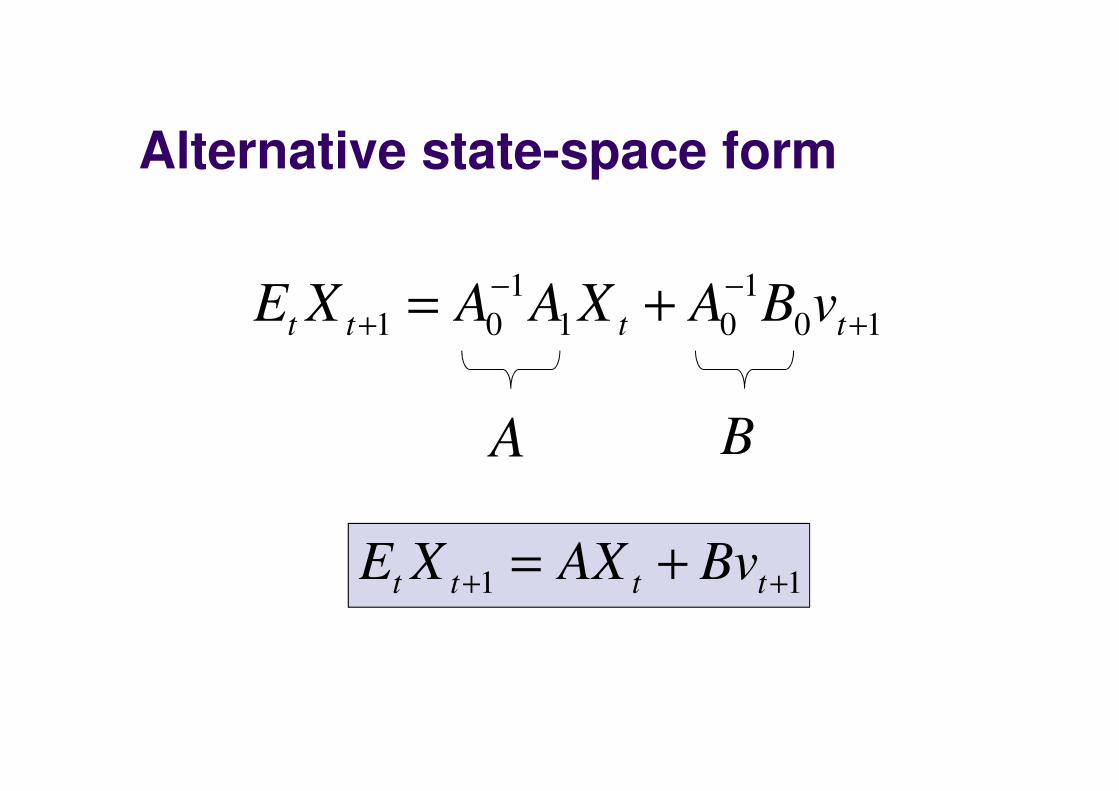
Alternative state-space form
10
1
01
1
01 +−−
+ += tttt vBAXAAXE
11 ++ += tttt BvAXXE
A B

Partitioning of model
1
1
1
+
+
++
=
t
t
t
tt
tBv
y
wA
yE
w
=
t
t
ty
wX
backward-looking variables
predetermined variables
forward-looking variables
control variables
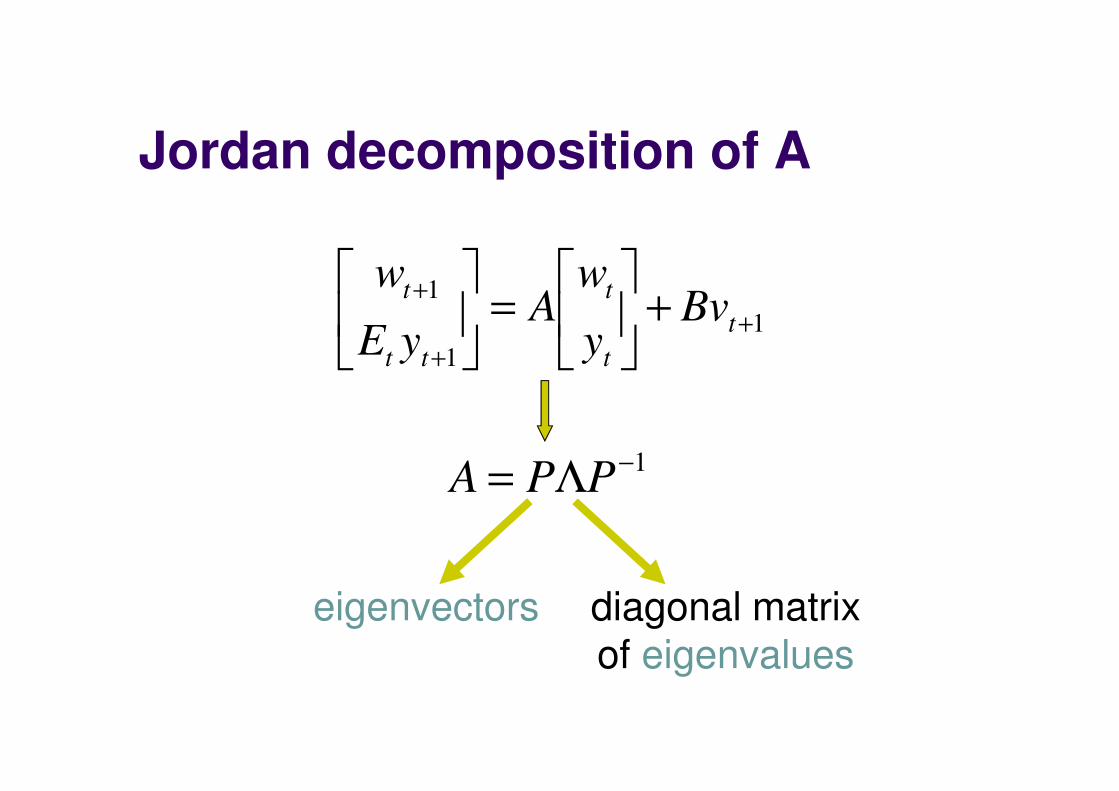
Jordan decomposition of A
1
1
1
+
+
++
=
t
t
t
tt
tBv
y
wA
yE
w
1−Λ= PPA
eigenvectors diagonal matrix
of eigenvalues
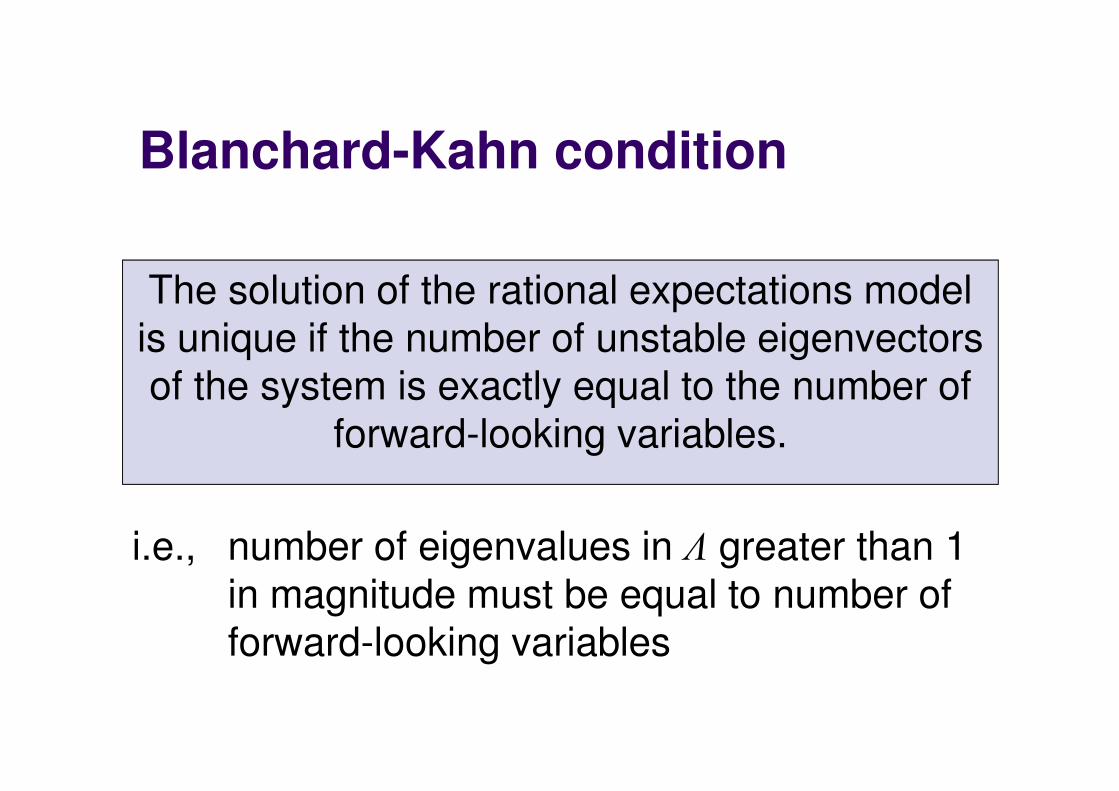
Blanchard-Kahn condition
The solution of the rational expectations model
is unique if the number of unstable eigenvectors
of the system is exactly equal to the number of
forward-looking variables.
i.e., number of eigenvalues in Λ greater than 1
in magnitude must be equal to number of
forward-looking variables

tw
ty
Too many stable roots
0w
multiple solutions
equilibrium path
not unique
need alternative
techniques

tw
ty
Too many unstable roots
0w
no solution
all paths are
explosive
transversality
conditions violated

tw
ty
Blanchard-Kahn satisfied
0w
one solution
equilibrium path
is unique
system has saddle
path stability
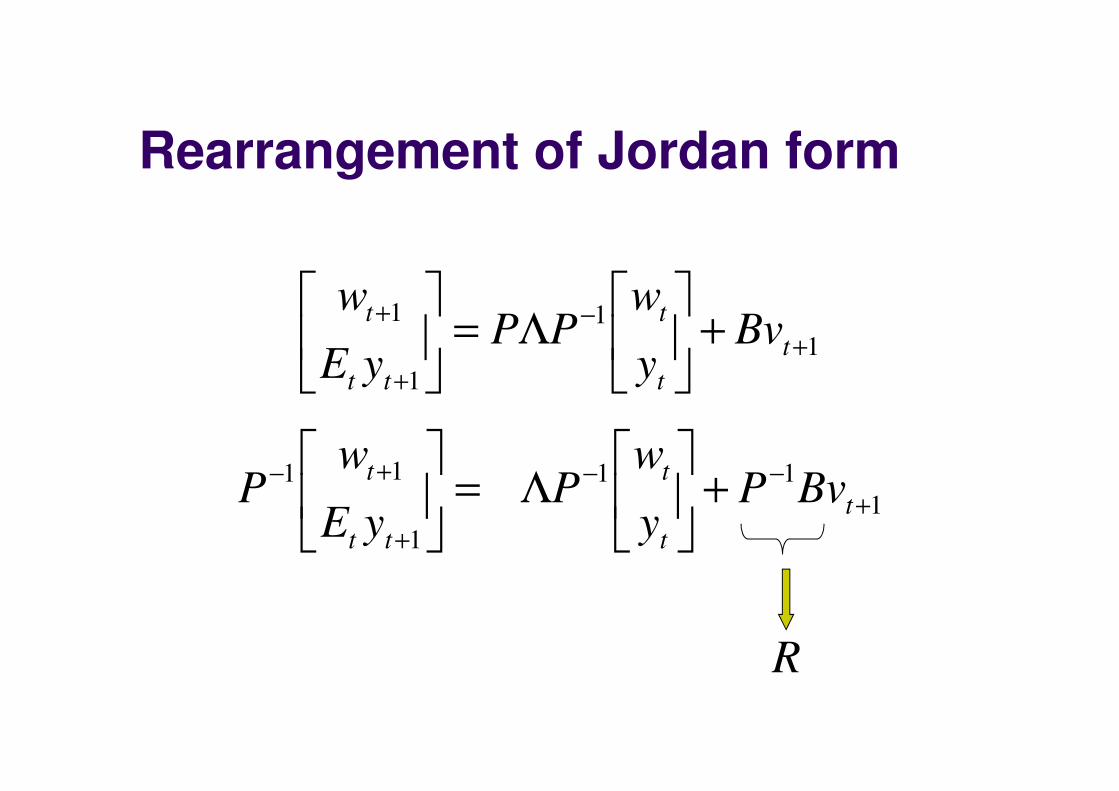
Rearrangement of Jordan form
1
11
1
11
+−−
+
+− +
Λ=
t
t
t
tt
tBvP
y
wP
yE
wP
1
1
1
1
+−
+
++
Λ=
t
t
t
tt
tBv
y
wPP
yE
w
R

Partition of model
Λ
Λ=Λ
2
1
0
0
=−
*
22
*
21
*
12
*
111
PP
PPP
1
1
1
11
+−
+
+− +
Λ=
t
t
t
tt
tRv
y
wP
yE
wP
=
2
1
R
RR
stable
unstable
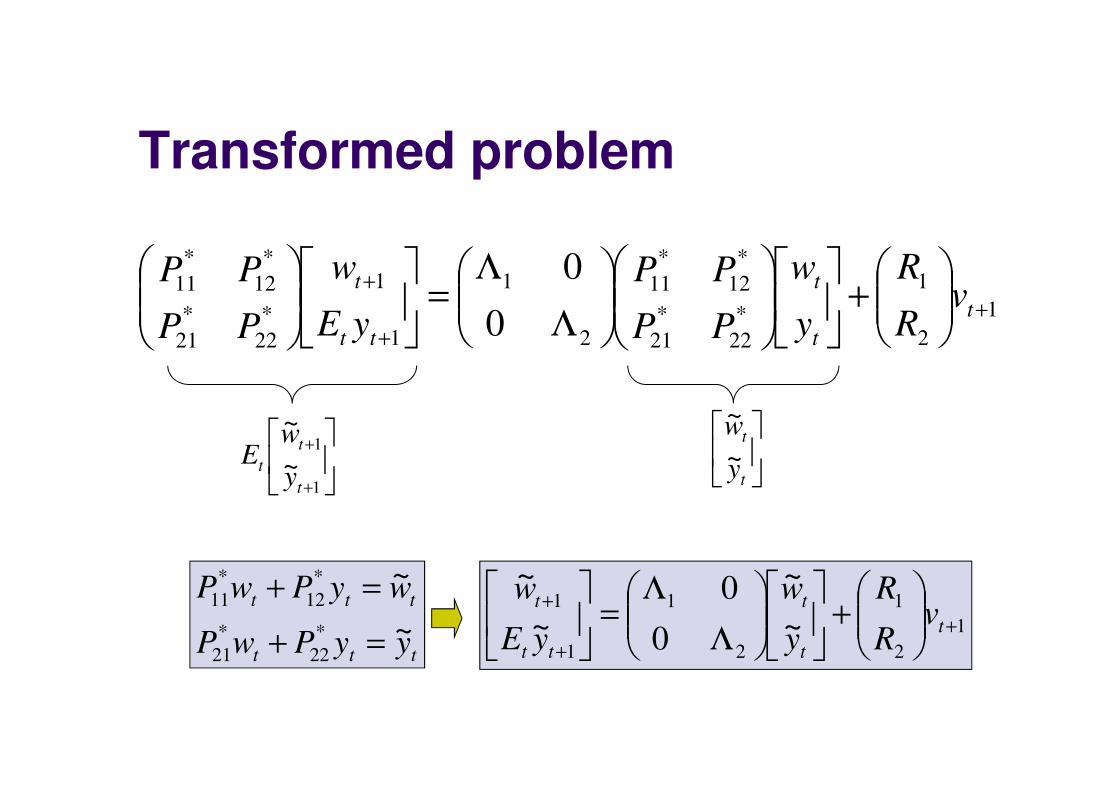
Transformed problem
+
+
1
1
~
~
t
t
ty
wE
t
t
y
w~
~
ttt
ttt
yyPwP
wyPwP
~
~
*
22
*
21
*
12
*
11
=+
=+
1
2
1
*
22
*
21
*
12
*
11
2
1
1
1
*
22
*
21
*
12
*
11
0
0+
+
+
+
Λ
Λ=
t
t
t
tt
tv
R
R
y
w
PP
PP
yE
w
PP
PP
1
2
1
2
1
1
1
~
~
0
0
~
~
+
+
+
+
Λ
Λ=
t
t
t
tt
tv
R
R
y
w
yE
w
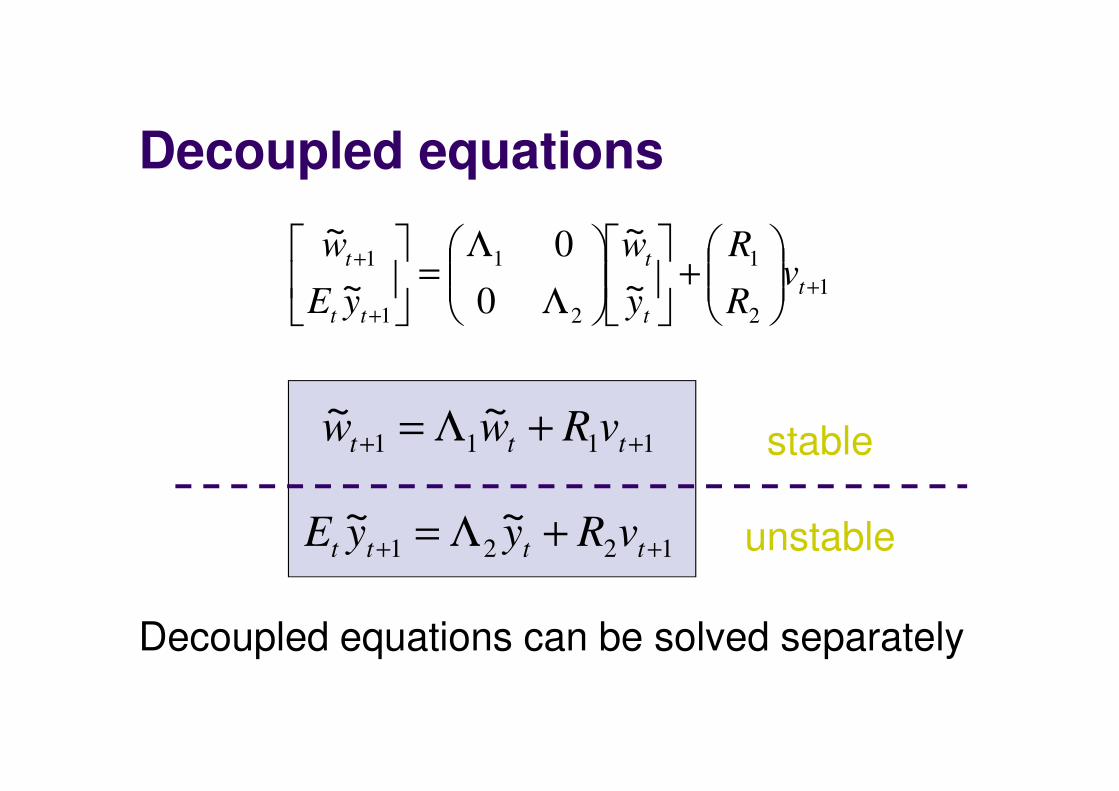
Decoupled equations
1
2
1
2
1
1
1
~
~
0
0
~
~
+
+
+
+
Λ
Λ=
t
t
t
tt
tv
R
R
y
w
yE
w
1111
~~++ +Λ= ttt vRww
1221
~~++ +Λ= tttt vRyyE
Decoupled equations can be solved separately
stable
unstable

Solution strategy
Solve unstable transformed equation ty~
Translate back into
original problem
tw~
t
t
y
w
Solve stable transformed equation

Solution of unstable equation
As , only stable solution is12 >Λ tyt ∀= 0~
0~ *
22
*
21 =+= ttt yPwPy
( ) t
j
jtt yyE ~~2Λ=+
tt wPPy*
21
1*
22
−−=
Solve unstable equation forward to time t+j
Forward-looking (control) variables are function
of backward-looking (predetermined) variables

Solution of stable equation
tt
ttt
wPPy
yPwPw
*
21
1*
22
*
12
*
11
~
−−=
+=
( ) t
j
jtt wwE ~~1Λ=+
tt wPPPPw )(~ *
21
1*
22
*
12
*
11
−−=
Solve stable equation forward to time t+j
As , no problems with instability11
<Λ

Solution of stable equation
11
1*
21
1*
22
*
12
*
11
*
21
1*
22
*
12
*
111
1*
21
1*
22
*
12
*
111
)(
)()(
+−−
−−−+
−+
−Λ−=
t
tt
vRPPPP
wPPPPPPPPw
1111
~~++ +Λ= ttt vRww
tt wPPPPw )(~ *
21
1*
22
*
12
*
11
−−=11
*
21
1*
22
*
12
*
11
~)( ++
− =− tt wwPPPP
Future backward-looking (predetermined)
variables are function of current backward-
looking (predetermined) variables

Full solution
11
1*
21
1*
22
*
12
*
11
*
21
1*
22
*
12
*
111
1*
21
1*
22
*
12
*
111
*
21
1*
22
)(
)()(
+−−
−−−+
−
−+
−Λ−=
−=
t
tt
tt
vRPPPP
wPPPPPPPPw
wPPy
All variables are function of backward-looking
(predetermined) variables: recursive structure

Baseline DSGE model
t
t
t
tt
ttv
x
E
xE
+
−=
−−
+
+−
0ˆ
ˆ
1
1
ˆ
ˆ
0
111
1
11 σ
πκ
δσ
πβ
σ
11 ++ += ttt vv ερ
State space form
To make model more interesting, assume policy shocks vt follow an AR(1) process
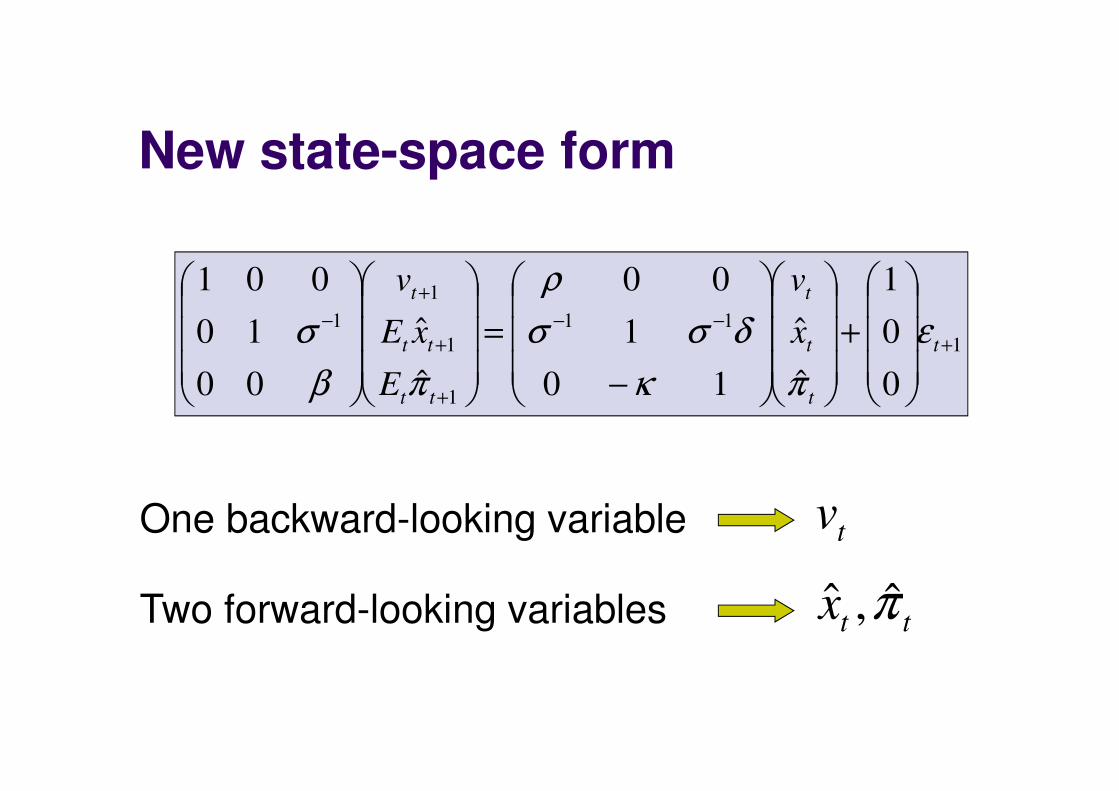
New state-space form
tv
1
11
1
1
1
1
0
0
1
ˆ
ˆ
10
1
00
ˆ
ˆ
00
10
001
+−−
+
+
+
−
+
−
=
t
t
t
t
tt
tt
t
x
v
E
xE
v
ε
πκ
δσσ
ρ
πβ
σ
ttx π̂,ˆ
One backward-looking variable
Two forward-looking variables

Blanchard-Khan conditions
=
=
t
t
t
tt
xy
vw
π̂
ˆ
Require one stable root and two unstable roots
Partition model according to

More complex models
Impulses
Propagation
Fluctuations
Frisch-Slutsky paradigm

Shocks may be correlated
Impulses
Can add extra shocks to the model
ttt
ttttt
ttttttt
vi
uxE
gEixEx
+=
++=
+−−=
+
+−
+
πδ
κπβπ
πσ
ˆˆ
ˆˆˆ
)ˆˆ(ˆˆ
1
1
1
1
+
=
+
+
+
+
+
+
g
t
u
t
v
t
t
t
t
t
t
t
g
u
v
g
u
v
1
1
1
333231
232221
131211
333231
232221
131211
1
1
1
ε
ε
ε
υυυ
υυυ
υυυ
ρρρ
ρρρ
ρρρ

Propagation
Add lags to match dynamics of data
(Del Negro-Schorfeide, Smets-Wouters)
ttxtt vxi ++= ˆˆˆ δπδπTaylor rule
ttt
p
t
p
p
t
ttttttt
xE
EixEh
xh
hx
ˆˆ1
ˆ1
ˆ
)ˆˆ(ˆ1
1ˆ
1ˆ
11
1
1
11
κπβγ
βπ
βγ
γπ
πσ
++
++
=
−−+
++
=
+−
+−
+−
29.01
35.01
≈+
≈+
p
p
h
h
βγ
γ

Simulation possibilities
Stylised facts
Impulse response functions
Forecast error variance decomposition

Optimised Taylor rule
What are best values for parameters in Taylor
rule ?ttxtt vxi ++= ˆˆˆ δπδπ
Introduce an (ad hoc) objective function for policy
)ˆˆˆ(min222
0
titxt
i
iix λλπβ ++∑
∞
=

Brute force approach
Try all possible combinations of Taylor rule
parameters
Check whether Blanchard-Kahn conditions are
satisfied for each combination
For each combination satisfying B-K condition,
simulate and calculate variances

Brute force method
Calculate simulated loss for each combination
Best (optimal) coefficients are those satisfying
B-K conditions and leading to smallest
simulated loss
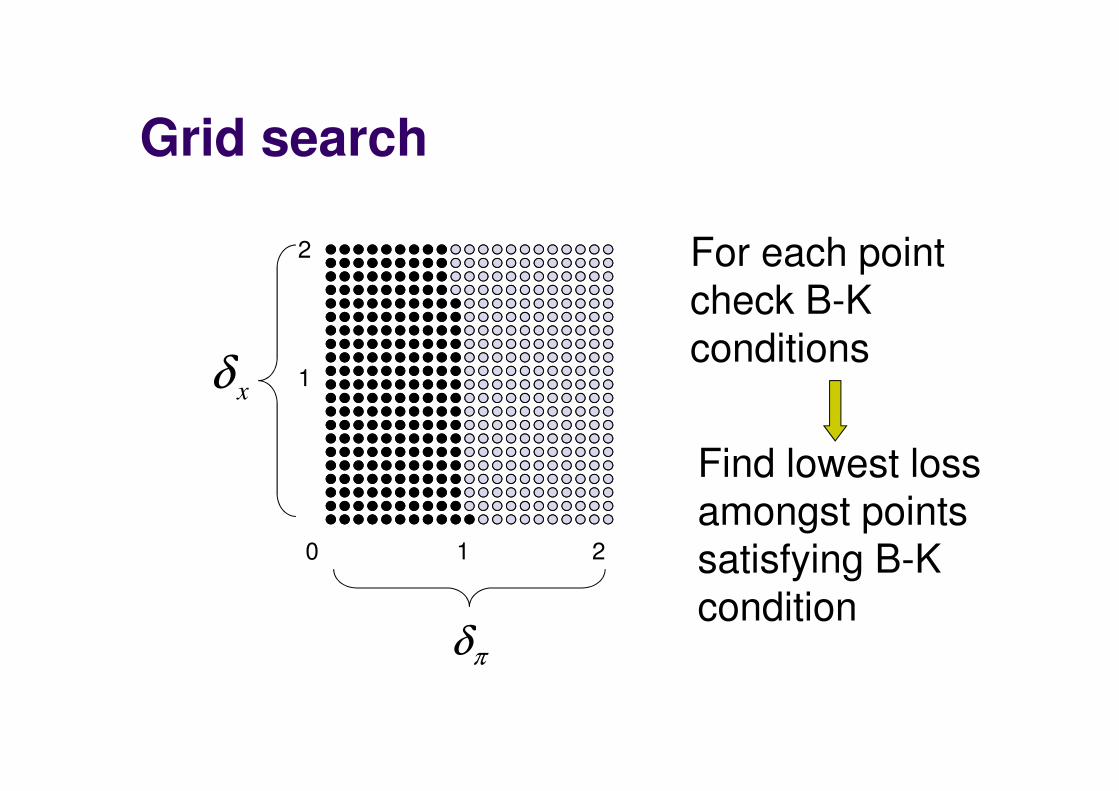
Grid search
πδ
xδ
0 1 2
2
1
For each point
check B-K
conditions
Find lowest loss
amongst points
satisfying B-K
condition