instituto politcnico nacionaltesis.ipn.mx/jspui/bitstream/123456789/2414/1/891_2006... ·...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
“MODELO MATEMÁTICO PARA EL DISEÑO AERODINÁMICO DE UN ROTOR DE LEVANTAMIENTO DE
ALTA EFICIENCIA”
T E S I S QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS CON ESPECIALIDAD EN INGENIERÍA MECÁNICA
PRESENTA
ING. ARMANDO OROPEZA OSORNIO
DIRECTOR DE TESIS
Dr. IGNACIO CARVAJAL MARISCAL



CONTENIDO NOMENCLATURA i
RELACIÓN DE FIGURAS Y TABLAS iiRESUMEN iiiABSTRACT ivINTRODUCCIÓN v CAPÍTULO I ESTADO DEL ARTE 1.1 La pala del rotor de levantamiento 2 1.2 Aerodinámica de la pala 3 1.3 El rotor de levantamiento 4 1.4 El rotor óptimo 6 1.5 Trabajos previos en el diseño del rotor óptimo 7 CAPÍTULO 2 AERODINÁMICA DEL ROTOR DE SUSTENTACIÓN 2.1 Vuelo estacionario 10
2.2 Método de momentum 10 2.3 Tracción y potencia para vuelo estacionario 11 2.4 Método de elemento de pala 13
2.4.1 Fuerza de sustentación 13 2.4.2 Integración de la fuerza de tracción 15 2.4.3 Relación entre la fuerza de tracción y el ángulo de paso 17 2.4.4 Potencia 18 2.4.5 Integración de la potencia 19
2.5 Método combinado 2.6 Método de vórtice 2.7 Pérdida en las puntas 2.8 Claro en la raíz
20212123
CAPÍTULO 3 DESARROLLO EXPERIMENTAL 3.1 Modelo matemático 25 3.2 Determinación de la fuerza de tracción 25 3.3 Determinación de la potencia inducida 29

CAPÍTULO 4 COMPARACIÓN DEL MODELO MATEMÁTICO 4.1 Comparación del modelo matemático 33 4.2 Resultados del método de momentum
4.3 Resultados del método de elemento de pala 4.4 Resultados del método combinado 4.5 Resultados del modelo matemático propuesto 4.6 Comparación de resultados
3335384143
CONCLUSIONES
45
RECOMENDACIONES PARA TRABAJOS FUTUROS
47
REFERENCIAS
49
APÉNDICE A INTEGRACIÓN DE LA FUERZA DE TRACCIÓN
52
APÉNDICE B INTEGRACIÓN DE LA FUERZA HORIZONTAL
56
APÉNDICE C CARACTERÍSTICAS DEL HELICÓPTERO
60
APÉNDICE D EL PERFIL NACA 0012
62
APÉNDICE E BANCO DE PRUEBAS
66

NOMENCLATURA
Símbolo Descripción Unidad
A Área m2
Ap Área de las palas m2
CL Coeficiente de sustentación adim Clmáx Coeficiente de sustentación máxima adim CD Coeficiente de arrastre adim c Cuerda m D Fuerza de arrastre N ER Energía disipada por el rotor Joule EE Energía absorbida por la estela Joule Fx Fuerza vertical N Fy Fuerza horizontal N K Factor de aumento de potencia inducida adim k Pendiente de la curva de sustentación 1/rad M Momento Nm N Número de palas adim P Potencia Watts Pi Potencia inducida Watts R Radio en la punta de la pala m r Radio local m S Fuerza de sustentación N tc Cuerda en la punta de la pala m V Velocidad del viento relativo m/s V1 Velocidad corriente arriba m/s V2 Velocidad corriente abajo m/s Vi Velocidad inducida m/s
Letras griegas
α Ángulo de ataque del perfil rad θ Ángulo de paso local rad ρ Densidad del fluido kg/m³ σ φ ψ ϖ
Solidez Ángulo de entrada de flujo Ángulo azimutal Velocidad rotacional
adim rad rad
rev/s
i

RELACIÓN DE FIGURAS Y TABLAS
No. de Figura Título Página Figura 1 Funcionamiento de la pala 2Figura 2 Fuerzas y ángulos que existen en la pala 3Figura 3 Rotor de sustentación 5Figura 4 Modelo de disco actuador 11Figura 5 Elemento de pala 14Figura 6 Sección transversal de la pala 19Figura 7 Velocidades, fuerzas y ángulos sobre elemento de pala 26Figura 8 Fuerza detracción en el método de momentum 34Figura 9 Potencia inducida en el método de momentum 35Figura 10 Fuerza de tracción en el método de elemento de pala 37Figura 11 Potencia inducida en el método de elemento de pala 38Figura 12 Fuerza de tracción en el método combinado 40Figura 13 Potencia inducida en el método combinado 40Figura 14 Fuerza de tracción en el modelo matemático propuesto 41Figura 15 Potencia inducida en el modelo matemático propuesto 42Figura 16 Fuerza de tracción en el método de momentum y en el modelo
matemático propuesto 43
Figura 17 Potencia inducida en el método de momentum y en el modelo matemático propuesto
44
Figura D1 Perfil NACA0012 63Figura D2 Curva polar del perfil 63Figura D3 Curva de sustentación del perfil 64 Tabla 1 Resultados obtenidos al evaluar las características del
helicóptero 43
ii

RESUMEN
En el presente trabajo se desarrolla un modelo matemático para el cálculo aerodinámico de un rotor de sustentación de alta eficiencia. Dicho modelo está integrado por dos ecuaciones diferenciales, una para el cálculo de la fuerza de tracción y la otra para el cálculo de la potencia inducida. Este modelo fue modelado de acuerdo con lo establecido en los métodos tradicionales de cálculo aerodinámico como son el método de momentum, método de elemento de pala y método combinado. Para obtener la solución de dicho modelo se utilizó el software MAPLE®V9.5. En el modelo se consideran las pérdidas que existen por forma del perfil, es decir; las pérdidas debidas al giro del rotor dentro del fluido y la contribución que tiene la componente de fuerza de arrastre sobre la fuerza de tracción, y la contribución de componente de la fuerza de sustentación sobre la fuerza horizontal. El modelo sólo tiene aplicación para el estado operativo de vuelo estacionario, por ser la condición en la cual se demanda más potencia, además de considerar únicamente palas con cuerda constante y torcimiento geométrico lineal. Con el fin de comparar el modelo matemático propuesto con los métodos de cálculo existentes se considera el rotor principal de un helicóptero real, AEROSPATIALE As 350B, este consta de un rotor principal tripala cuyas palas tienen torcimiento geométrico lineal y cuerda constante. Las características geométricas y condiciones de operación son evaluadas con los métodos de momentum, el de elemento de pala y el combinado. Los resultados de fuerza sustentación y potencia inducida obtenidos de estos, son comparados con los arrojados por el modelo matemático. Finalmente se calculó la figura de mérito para modelo propuesto para compararlo con los métodos existentes.
iii

ABSTRACT
In the present work a mathematical model of a high efficiency lifting rotor is presented. The model is composed of two differential equations; one related to the induced power ant the other to the lift force. The model was obtained by applying classical aerodynamic theory, e.g. momentum, blade element and a combination of bath. The MAPLE®V9.5 software was is used to perform the calculations. The model is obtained considering the power required in terms of the vertical and horizontal components of the lift and drag force. The validity of the model is restricted to hover flight. It should recall that the highest power demand occurs during hover flight. Blades with constant chord and linear twist are considered. In order to asses the model the data of the AEROSPATIALE As 350B helicopter rotor is considered. The rotor has tree blades with linear twist and constant chord. The calculation of the rotor power required using the momentum, blade element theory and the method here proposed are presented. The results of the induced power and the trust power are compared with the results obtained with the model here proposed. Finally the merit figure is calculated in order to compare the mathematical model with the other methods.
iv
INTRODUCCIÓN.
Los medios de transporte surgen por la necesidad del hombre a desplazarse grandes distancias. Los vehículos terrestres y los marítimos fueron en primera instancia la solución, pero tenían el inconveniente de que el tiempo de traslado era alto. Con la aparición de los vehículos aéreos los requerimientos de distancias largas y tiempos de traslado cortos fueron satisfechos, estos tenían la única desventaja de ser un medio de transporte más caro. Con el paso del tiempo se lograron conseguir aparatos más robustos y mucho más eficientes, lo cual disminuyó sus costos de operación y mantenimiento. Actualmente viajar en algún tipo de aeronave es común para la mayoría de las personas.
Desde su concepción hasta su estado actual las aeronaves siempre han estado en
continuo desarrollo, y no sólo para su empleo dentro de nuestra atmósfera sino también para viajes espaciales. Los desarrollos y avances en esta área están encabezados por países de primer mundo, los cuales se han preocupado por su desarrollo principalmente por cuestiones bélicas.
Sin embargo en países como el nuestro, el desarrollo en lo que respecta al área
aeronáutica es nulo, a pesar de que la industria de la aviación está consolidada desde hace algunas décadas. Los motivos son diversos, falta de interés, de recursos, y lógicamente falta conocimiento profundo del tema.
El entorno podría parecer gris, aún así se tiene la firme convicción de empezar a
desarrollar tecnología propia y empezar a dejar de depender de los países de primer mundo, para ello surge la idea de construir una aeronave de ala rotativa, comúnmente llamado helicóptero, cuyo desarrollo sea completamente nacional, para acceder a éste se deberán realizarse proyectos e investigaciones menores que lleven a alcanzar esta meta.
Para diseñar un helicóptero, lo prioritario es el diseño y construcción del rotor
principal. El análisis aerodinámico y desarrollo de rotores de levantamiento ha cobrado gran auge, debido a que los vehículos en los cuales se instalan necesitan tener cada vez menor peso y ser más compactos. El diseño de dichos dispositivos está fundamentado en las teorías aerodinámicas clásicas; es decir las utilizadas para analizar un avión convencional pero además se incluyen métodos específicos para estos, por tratarse de elementos rotativos.
El presente trabajo tiene como objetivo el desarrollo de un modelo matemático que
sirva para el diseño aerodinámico de rotores de levantamiento para helicópteros, este modelo matemático consta de dos ecuaciones, una para el cálculo de la fuerza de tracción y la otra para el cálculo de la potencia inducida. La diferencia entre éste y los métodos existentes es que se considera la contribución de la fuerza de arrastre sobre la fuerza de tracción total al igual que la influencia de la fuerza de sustentación sobre la fuerza de arrastre, la velocidad del viento que impacta sobre el perfil es función de la velocidad tangencial y la velocidad inducida. Además, se toma en cuenta un torcimiento geométrico
v
ideal, el coeficiente se sustentación como función del ángulo de ataque y la pendiente de la curva de sustentación del perfil y el coeficiente de arrastre expresado en su forma polar.
El presente trabajo de tesis consta de cuatro capítulos:
En el primero se hace referencia a los trabajos previos referentes al diseño aerodinámico de rotores de levantamiento. En el segundo capítulo se explican los métodos de diseño aerodinámico conocidos, el método de momentum, el método de elemento de pala y el método combinado. En el tercer capítulo se muestra el planteamiento, el desarrollo y la solución del modelo matemático, para la fuerza de tracción y la potencia inducida. En el cuarto y último capítulo se comparan los resultados obtenidos de los métodos de momentum, elemento de pala y combinado con el modelo matemático propuesto al sustituir las características físicas y de operación de un rotor de sustentación real y se calcula la figura de mérito para el modelo matemático.
Finalmente; como producto extra al presente trabajo de investigación, se diseñó y construyó un banco de pruebas con el objetivo realizar ensayos experimentales sobre rotores de levantamiento, pudiendo realizarse también pruebas en hélices. En el apéndice E se hace una descripción breve del banco de pruebas y su funcionamiento.
vi

Capítulo 1 Estado de arte
CAPÍTULO 1 ESTADO DE ARTE En el presente capítulo se hace referencia a las generalidades del rotor de levantamiento y su funcionamiento, además de una revisión de las investigaciones existentes referentes al diseño de rotores de sustentación con el fin de tomar las experiencias y resultados obtenidos en éstas y plantear un nuevo modelo que tenga como finalidad el diseño de un rotor de levantamiento óptimo.
1
Capítulo 1 Estado de arte
1.1 La pala del rotor de levantamiento
Una pala es una superficie de sustentación, puede considerarse como el ala de un avión convencional, salvo que a diferencia de ésta; la pala no está fija, en su estado operativo se encuentra en un movimiento continuo de rotación alrededor de un eje. El número de palas es directamente proporcional a la fuerza de sustentación generada, pero también lo es para la potencia requerida, siendo esta la razón por la cual la mayoría de los rotores cuentan con sólo dos palas, por ser ésta la configuración que requiere menor potencia a utilizar.
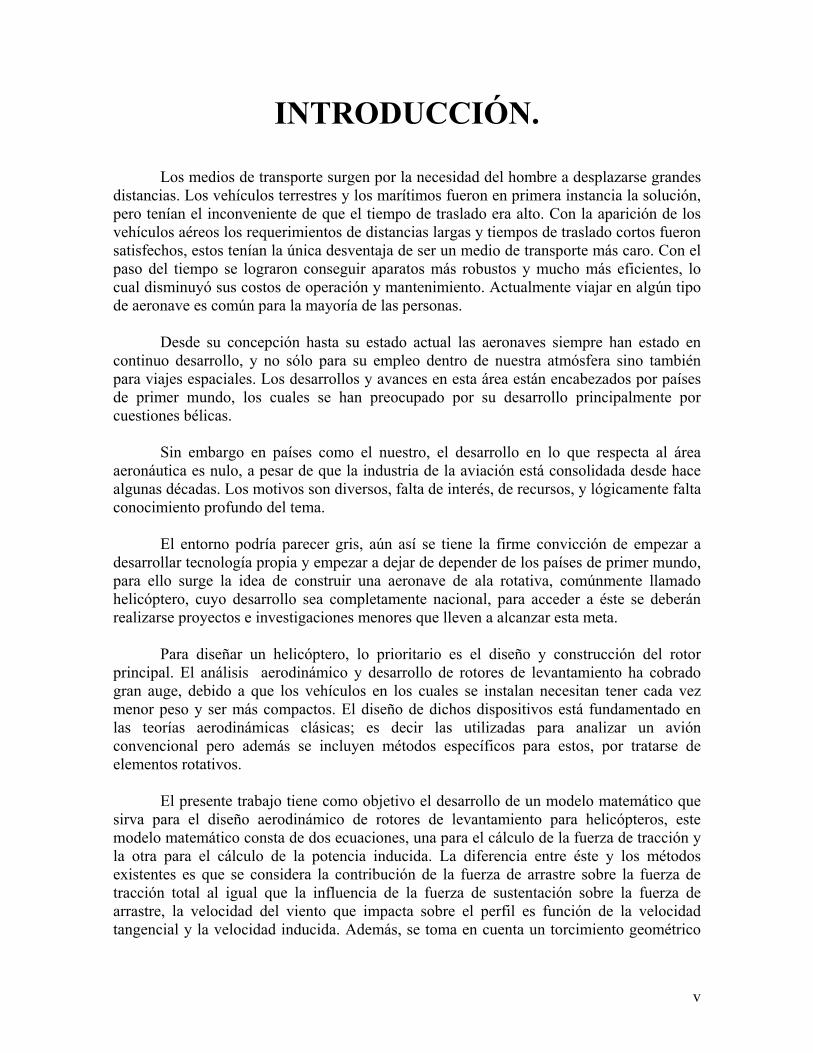
Es común que la dirección de rotación de las palas sea en sentido contrario a las
manecillas del reloj (visto en planta). El lado derecho se conoce como lado que avanza y el lado izquierdo el que retrocede, figura 1.
Figura 1. Funcionamiento de la pala
La pala por lo general tiene torcimiento a lo largo de su longitud. Existen dos tipos de torcimiento, el torcimiento geométrico y el torcimiento aerodinámico. El torcimiento geométrico se refiere al ángulo de paso que tiene el perfil en su posición radial, conservándose el mismo perfil a lo largo de la pala, además el torcimiento geométrico puede ser lineal o ideal. En el torcimiento geométrico lineal el ángulo de ataque del perfil se conserva, mientras que para el torcimiento geométrico ideal se determina la posición exacta que debe tener el perfil para generar la máxima fuerza de sustentación y la mínima fuerza de arrastre. La relación de torcimiento lineal (relación del ángulo de paso en la punta de la pala menos el ángulo de paso en su raíz) es generalmente negativa para el rotor de helicóptero. Dentro del torcimiento aerodinámico se contempla el cambio de perfil para cada posición radial.
2

Capítulo 1 Estado de arte
1.1 Aerodinámica de la pala
Al entrar el rotor en operación se originan dos fuerzas sobre la pala, la fuerza de sustentación S, la cual es normal al viento relativo y se considera positiva cuando es hacía arriba; y la fuerza de arrastre D, la cual es opuesta a la velocidad de desplazamiento de la pala y perpendicular a la fuerza sustentación. La proyección de estas fuerzas sobre el eje de las abcisas y las ordenadas da como resultado la obtención de la fuerza vertical Fy y la fuerza horizontal Fx, la fuerza vertical también es conocida como fuerza de tracción, figura 2.
Figura 2. Fuerzas y ángulos que existen en la pala
En la figura previa es posible observar los tipos de velocidad y ángulos que existen
cuando una pala se encuentra en operación. V = Velocidad del viento relativo, es la velocidad del viento que incide sobre el perfil. Vi = Velocidad inducida, es normal al plano del disco y positiva y positiva cuando fluye hacía abajoa través del disco, produciendo tracción en el rotor. ωr = Velocidad tangencial, debida al movimiento de rotación en la pala y es función del radio de ésta. α = Ángulo de ataque de la sección de pala, es el ángulo formado entre la línea de cero sustentación y el viento relativo.
3

Capítulo 1 Estado de arte
θ = Ángulo de paso, es el ángulo al cual se encuentra posicionado el perfil respecto al plano de rotación. φ = ángulo de entrada de flujo ó ángulo inducido, es el ángulo formado entre el viento relativo y el plano de disco rotor. De la misma forma que se realiza para un ala fija, es posible obtener los coeficientes de tracción y arrastre para un ala rotativa [11]:
CT = Coeficiente de tracción = ( )2rATωρ
(1.1)
CD = Coeficiente de arrastre = ( )2rADωρ
(1.2)
Estos coeficientes también pueden ser expresados en relación al área efectiva de las palas:
( ) ( )22 rA
TrA
TC
p
T
ωσρωρσ== (1.3)
( ) ( )22 rA
DrA
DC
p
D
ωσρωρσ== (1.4)
donde σ es la solidez, este término representa el área efectiva de sustentación del rotor, es decir; la relación que existe entre el área de las palas y el área del disco rotor:
A
Ap=σ (1.5)
La carga alar en el disco es la relación que existe entre la fuerza de sustentación y el área del disco S/A, y la carga de potencia es la relación de la potencia entre la fuerza de sustentación. La carga en la pala es la relación de la sustentación entre el área de la pala, S/Aβ = S/(σA), o en forma de coeficiente, la relación del coeficiente de sustentación entre la solidez, CL/σ.
4

Capítulo 1 Estado de arte
1.3 El rotor de levantamiento. Un rotor, es aquél dispositivo aerodinámico utilizado para obtener una fuerza útil conocida como fuerza de sustentación. Consiste de dos o más palas idénticas e igualmente espaciadas unidas a un cubo central, figura 3. Las palas se mantienen en movimiento rotacional uniforme, usualmente por una flecha movida por el motor. Las fuerzas de sustentación y de arrastre producen sobre estas alas rotativas, torque y otras fuerzas, como la fuerza vertical y la fuerza horizontal, además de momentos en el rotor. El gran diámetro requerido para un vuelo vertical ascendente eficiente y el gran alargamiento necesario para una buena aerodinámica del ala rotativa resultan en palas que son considerablemente más flexibles que rotores con cargas alares grandes como son las hélices. El movimiento rotacional genera grandes esfuerzos en las palas y grandes momentos en la raíz de éstas, los cuales se trasmiten al helicóptero a través del cubo. Por esto, se debe prestar atención especial en el diseño de las palas y su cubo, tratando de mantener siempre cargas alares bajas, entre 100N/m² y 500N/m² por ser este el intervalo en el que se encuentra la mayoría de rotores actuales [11]. La solución para atenuar este problema es utilizar articulaciones en la raíz de la pala, para permitir un movimiento libre en ésta, normal y paralelo a su plano de rotación.
Figura 3. Rotor de sustentación
5

Capítulo 1 Estado de arte
En sus inicios el desarrollo de aeronaves de ala rotativa se encontró con tres problemas, que serían resueltos satisfactoriamente. El primer problema fue encontrar la planta motriz adecuada. El motor recíprocante de combustión interna fue el primero en cubrir los requerimientos y mucho después se adoptó el turbohélice; obteniendo con éste, grandes resultados. El segundo problema fue el desarrollo de una estructura resistente para soportar el rotor, el cubo y las palas. El tercer problema fue encontrar el sistema de control para el helicóptero, incluyendo el balanceo y torque del rotor. Estos problemas fueron esencialmente los mismos a los que se enfrentó el desarrollo de aeronaves de ala fija, los cuales fueron resueltos por los hermanos Wright. La evolución del helicóptero ha sido siempre paralela a las aeronaves de ala fija, sólo que el costo en su desarrollo es mayor porque la tecnología necesaria para crear los mecanismos de control y operación del rotor es compleja [14]. 1.4 El rotor óptimo
Un rotor de sustentación óptimo, es el rotor en el cual la fuerza de sustentación es
máxima y la potencia consumida por éste, es mínima. Para determinar el grado de eficiencia de un rotor de sustentación existe una relación conocida como figura de mérito, cuanto más se acerque el valor de este parámetro a la unidad, mayor será la eficiencia del rotor [18]. Por esto los métodos o modelos de diseño óptimo, son un tema de gran importancia en aplicaciones aeronáuticas; sobre todo para el análisis de desempeño de rotores de sustentación.
Desarrollar un análisis efectivo a través del cual se puedan conocer los requerimientos del desempeño del rotor en vuelo estacionario, ascenso o vuelo con gran velocidad axial es un problema de gran dificultad. La condición de vuelo estacionario por sí misma, representa un problema importante debido al rol que éste representa en la potencia del motor, la distribución de carga alar y el torcimiento en las palas. Sin embargo; la condición de vuelo axial, representa un problema aún más crítico, por el hecho de la inclinación del disco rotor; por lo que para contar con un diseño de rotores de sustentación con desempeño eficiente debe incluirse además un análisis para estos en forma de hélice. La complejidad aumenta aún más cuando se consideran condiciones dinámicas y estructurales.
Cuando se pretende diseñar un rotor eficiente es conveniente establecer a través de cual de las variables que intervienen en su configuración y funcionamiento se desea obtener la optimización, es decir; se puede plantear el diseño obteniendo el tipo de perfil aerodinámico más indicado para cada estación a lo largo de la pala, determinar el tipo de torcimiento adecuado, ya sea geométrico o aerodinámico, la cantidad del número de palas necesarias, sí éstas deben ser puntiagudas o rectangulares o establecer la mejor velocidad de rotación.
6

Capítulo 1 Estado de arte
1.5 Trabajos previos en el diseño del rotor óptimo Debido a la importancia que tiene el contar con rotores de sustentación altamente eficientes; la investigación en lo que se refiere a su optimización, se ha desarrollado de forma sustancial, los trabajos que existen en la actualidad respecto a su diseño son variados debido a los diferentes enfoques que pueden tener, pueden ser netamente teóricos ó experimentales; y en ocasiones mixtos. Como aplicaciones particulares, Moffit y Bisell [15] realizan una revisión general de la distribución de cargas en vuelo estacionario y vuelo vertical empleando un modelo aerodinámico de estela con circulación incluida. El objetivo de encontrar la distribución de cargas es conocer la potencia mínima requerida para una sustentación dada. Nagashima y Nakanishi [16] estudiaron el desempeño en vuelo estacionario de rotores coaxiales, empleando ambos un modelo generalizado de momento, basado en anillos de vórtice siendo éste una simplificación del modelo de estela libre. Walsh, Bingham y Riley [23], Chattapodhyay, Walsh y Riley [2] describen el conjunto de algunos modelos aerodinámicos existentes para rotores muy estilizados y una rutina de optimización (CONMIN) aplicable a la optimización en el diseño de palas para vuelo estacionario y vuelo hacia delante. Este trabajo es parte de un gran esfuerzo para el desarrollo de un método de diseño multidisciplinario de optimización para ala rotativa Adelman y Mantay [1], en el cual se logró el compromiso entre el diseño físico y la medición de los parámetros de desempeño.
El desarrollo de herramientas computacionales para su aplicación en el diseño de rotores ha sido uno de los principales temas de estudio en las últimas décadas. Quackenbush y Boschitsch [19] desarrollan EHPIC (Evaluation of Hover Performance using Influence Coefficients), el cual es un programa que permite conocer y evaluar las características de desempeño del rotor, cambiarlas y recalcular, aunque con la limitante de que sólo algunas de estas características pueden ser modificadas. Mattos y Stuttgart [6] plantean la PROD2D, una técnica de diseño para flujos transónicos, acompañada de un código de análisis, a través de la cual, dada una geometría inicial y una distribución de Cp, una nueva geometría puede ser obtenida aproximadamente en un rango de 20 a 30 ciclos de diseño. El código XFOIL creado por Drela [8], se utiliza para el diseño de la geometría de perfiles con gran sustentación a velocidades subsónicas o muy cercanas a éstas, se puede realizar un análisis para flujo viscoso y para flujo no viscoso, obteniendo también el Clmáx del perfil. El ISES, también desarrollado por Drela [9], es un código de volúmenes finitos, utilizado para representar la capa límite y las ondas de choque. Esta técnica es utilizada para determinar la divergencia del número de Mach.
En todas estas investigaciones se define un objetivo (por ejemplo, niveles de
vibración o figura de mérito en vuelo estacionario) con un conjunto de parámetros que pueden ser variados, aunque con sus respectivas limitaciones, por medio de valores iniciales en los parámetros es posible conocer el desempeño del rotor y establecer funciones para predecir el comportamiento de éste con valores diferentes. Los trabajos más recientes [19 y 20] han expandido el alcance de dichos métodos, ya que en estos la optimización es multidisciplinaría, incluyendo funciones mas complejas para los
7

Capítulo 1 Estado de arte
objetivos establecidos (por ejemplo, figura de mérito en vuelo estacionario y frecuencia dinámica, potencia de ascenso y nivel de ruido).
En cada una de las investigaciones citadas se incluye la optimización de diseño, además de la utilización de modelos aerodinámicos simplificados en los cálculos de desempeño. Ahora con el desarrollo en las herramientas computacionales, es posible programar y diseñar de manera más eficaz y eficiente, gracias a que se utilizan modelos básicos o simplificados, estos permiten que puedan ser adaptados o enriquecidos con más información, teniendo como resultado diseños más exactos.
A diferencia de las investigaciones planteadas previamente, en el presente trabajo
de tesis se plantea un modelo matemático general para determinar las características aerodinámicas de un rotor de sustentación en estado de vuelo estacionario, pudiendo establecer con esto de manera global los efectos que el aire produce sobre éste. Dicho modelo está basado en métodos aerodinámicos tradicionales, pero en éste se consideran las pérdidas que existen al estar el rotor en operación, tales como la fuerza de arrastre y las vórticidades en la punta y en la raíz de la palas, es decir; se obtendrá la sustentación efectiva en éstas. La condición de análisis para vuelo estacionario se debe a que éste es el estado de operación dentro del cual el rotor consume la máxima potencia, además sólo se establece para un rotor bipala debido a que cuanto menor sea el número de palas, menor será la demanda de potencia. En el siguiente capítulo se describen los métodos de análisis y diseño aerodinámico existentes.
8
Capítulo 2 Aerodinámica del rotor de sustentación
CAPÍTULO 2 AERODINÁMICA DEL ROTOR DE SUSTENTACIÓN
En el presente capítulo se explican los principales métodos que existen para el cálculo y diseño aerodinámico de rotores de levantamiento y su aplicación para la condición operativa de vuelo estacionario.
9

Capítulo 2 Aerodinámica del rotor de sustentación
2.1 Vuelo estacionario El vuelo estacionario es el estado de operación en el cual el rotor de sustentación no tiene velocidad relativa al aire, vertical u horizontal. El vuelo vertical involucra flujo axial respecto al rotor y simetría axial de éste, es por esto que las velocidades y cargas sobre las palas del rotor son independientes de su posición azimutal. La simetría axial simplifica enormemente la dinámica y aerodinámica del rotor. Los análisis básicos de un rotor en flujo axial se establecieron en el siglo XIX con el diseño de hélices para uso marino y su posterior aplicación en hélices de aeronaves. El principal objetivo del análisis de vuelo estacionario del rotor es predecir las fuerzas que en éste se originan y la potencia necesaria para mover las palas, ya que en esta condición es cuando la demanda de potencia es mayor; y así poder obtener diseños de rotor más eficientes. La potencia inducida es la energía mínima necesaria consumida por el rotor para mantener el helicóptero en vuelo. De la potencia total generada por él ó los motores sólo una cantidad es aprovechada por el rotor, otra porción es consumida por los mecanismos que lo hacen funcionar, además una cantidad de dicha potencia debe ser reservada para condiciones de emergencia. La velocidad inducida es la velocidad que tiene el flujo que atraviesa al rotor, desde su parte posterior hacía su parte inferior, su aceleración se debe a la aspiración que genera el rotor sobre éste. Mientras más grande sea la velocidad inducida, mayor será la fuerza de sustentación obtenida, pero para lograr esto es necesario incrementar la velocidad rotacional del rotor, lo cual trae como consecuencia una exigencia de potencia inducida mayor y la generación de momentos de gran magnitud en la raíz de las palas. Otra desventaja, es que a grandes velocidades se manifiestan los efectos de compresibilidad del flujo sobre las palas. Para calcular las características aerodinámicas de un rotor de sustentación existen algunos métodos como son el método de momentum o Rankine-Froude, método de elemento de pala, el método combinado y el método de vórtice. 2.2 Método de momentum El método de momentum, también conocido como modelo de Rankine Froude, está basado principalmente en los postulados de la 2ª y 3ª Ley de Newton, en los cuales se establece que: “La fuerza que actúa sobre un cuerpo es directamente proporcional al producto de su masa y su aceleración” y “A cada acción corresponde una reacción de igual magnitud pero en sentido contrario”, respectivamente; para el rotor de sustentación la acción corresponde a la fuerza de tracción que se genera debido al giro de éste y la reacción es la aceleración que sufre la masa de aire en sentido opuesto a la tracción. Otras leyes que se consideran son La Ley de Continuidad y La Ley de Conservación de Energía.
10
Capítulo 2 Aerodinámica del rotor de sustentación
vmmaF ∆==•→
(2.1)
Lo antes planteado es un método totalmente idealizado, ya que se supone al rotor de sustentación como un rotor con número infinito de palas, es decir; un disco actuador sólido a través del cual es posible acelerar aire, éste aspira el aire desde una zona de estancamiento en su parte superior (corriente arriba), y lo expulsa hacía abajo acelerando la cantidad de masa que lo atraviesa hasta una zona con velocidad finita (corriente abajo), entonces el campo de flujo adquiere una energía cinética, ésta energía constituye la potencia inducida del rotor. Otras suposiciones que se plantean en el método de momentum son que:
• El disco tiene un espesor igual a cero • La diferencia de presión es constante a través del disco • La velocidad vertical es continua a través de éste • La velocidad rotacional es impartida por el rotor al aire que lo atraviesa, es
decir todas las velocidades son axiales • El flujo de aire es dividido en dos regiones, la que interactúa con el disco
rotor y la externa a este. La primera es la que se toma en cuenta en este modelo.
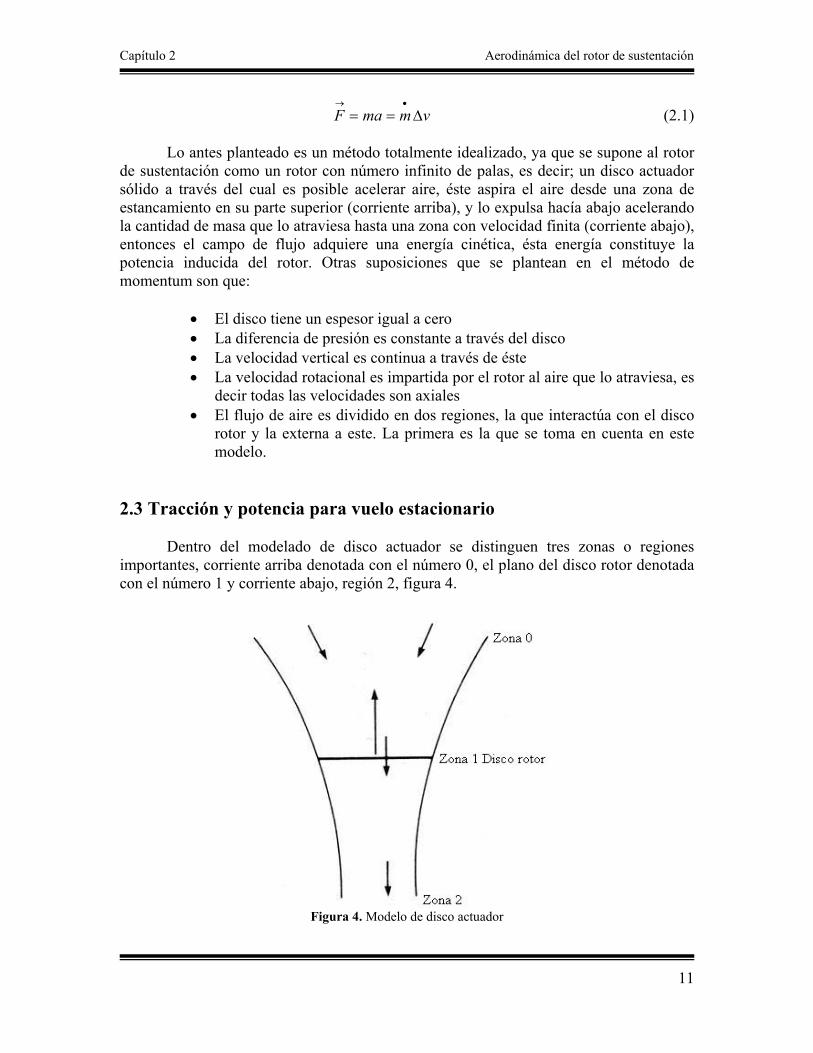
2.3 Tracción y potencia para vuelo estacionario Dentro del modelado de disco actuador se distinguen tres zonas o regiones importantes, corriente arriba denotada con el número 0, el plano del disco rotor denotada con el número 1 y corriente abajo, región 2, figura 4.
Figura 4. Modelo de disco actuador
11

Capítulo 2 Aerodinámica del rotor de sustentación
El flujo másico en el disco rotor es:
Avm 11 ρ=•
(2.2) Donde ρ es la densidad del aire, v1 es la velocidad inducida y A es el área del disco rotor. El cambio de velocidad ∆v entre la región 0 y 2 es:
02 vvv −=∆ (2.3) Pero como corriente arriba la velocidad es 0, entonces:
2vv =∆ (2.4) Y la expresión para la fuerza de tracción es:
21 AvvTvmF ρ==∆=•→
(2.5) Sin embargo; ésta ecuación no es muy útil ya que tanto v1 como v2 se consideran como incógnitas, una relación entre v1 y v2 puede ser obtenida igualando la energía disipada por el rotor y la energía absorbida por la estela, debido a que el rotor y la estela forman un sistema cerrado. La energía por segundo disipada por el rotor es:
22
11 AvvTvs
ER ρ== (2.6)
La energía por segundo absorbida por la estela es el cambio total en la energía cinética, ya que no existe energía cinética corriente arriba, el cambio total de energía es sólo el valor de energía que se tiene corriente abajo:
2222
1 vms
EE•
= (2.7)
El flujo másico corriente abajo es igual al flujo másico en el disco rotor, esto como consecuencia de La Ley de Continuidad, por lo tanto:
221
221 2
121 Avvvm
sEE ρ==
•
(2.8)
Igualando las expresiones (2.6) y (2.8) se obtiene:
12 2vv = (2.9)
12

Capítulo 2 Aerodinámica del rotor de sustentación
Sustituyendo en (2.5): AvT 2
12ρ= (2.10) Ya que la potencia es la fuerza aplicada a determinada velocidad, P = SV, sustituyendo a V por v1 de la expresión anterior, la potencia inducida es:
ATPi ρ2
23
= (2.11)
El modelo de momentum sólo se toma como referencia dentro del diseño de rotores debido a que en éste no se consideran ningún tipo de pérdidas. 2.4 Método de elemento de pala
Con el método de elemento de pala se calculan las fuerzas que se generan sobre la pala debido a su movimiento a través del aire, básicamente, el método de elemento de pala es un método de sustentación aplicado a ala rotativa dentro del cual se establecen criterios de análisis al igual que en el método de momentum, se asume que:
• La fuerza de sustentación es uniforme a lo largo de la pala • El rotor se encuentra completamente inmerso en la estela • Cada sección de pala actúa como un perfil bidimensional con ángulo
inducido para producir fuerzas aerodinámicas • Se considera una carga alar baja • El ala tiene gran alargamiento • Se desprecian los efectos de compresibilidad y estancamiento
La solución requiere entonces el cálculo de la velocidad inducida de la estela en el disco rotor, la cual se puede conocer a través del método de momentum o el método combinado. 2.4.1 Fuerza de sustentación
La geometría del elemento de pala se muestra en la figura 5. Un elemento de pala
es una pequeña porción de pala a una distancia r desde el centro de rotación con envergadura dr. Se define la geometría, velocidades y las fuerzas que actúan sobre la sección de pala, esta tiene un ángulo de paso θ , medido desde el plano de rotación a la línea de cero sustentación. La velocidad del aire que incide sobre la pala tiene componentes ωr y Vi, tangente y perpendicular al disco del plano, respectivamente. La magnitud de la velocidad resultante está dada por:
13

Capítulo 2 Aerodinámica del rotor de sustentación
( )22 rV ω= (2.12)
Figura 5. Elemento de pala.
Dentro del método de elemento de pala sólo se consideran las pérdidas de arrastre por la forma del perfil. El incremento de sustentación, dS, sobre dicho elemento de pala es:
( ) LcdrCrdS 2
21 ωρ= (2.13)
Donde ωr es la velocidad tangencial expresada en metros por segundo, esta velocidad es cero en el eje de rotación e incrementa linealmente hacía la punta y cdr es la superficie del elemento de pala. CL es el coeficiente de sustentación local del elemento de pala y puede expresarse como:
αkCL = (2.14) α es el ángulo de ataque local y k es la pendiente de la curva de sustentación del perfil, dicho ángulo está determinado geométricamente por el ángulo de paso de la pala θ y el ángulo de entrada de flujo φ :
φθα −= (2.15) El ángulo de entrada de flujo se define a través de dos velocidades mutuamente perpendiculares, ωr y Vi:
14

Capítulo 2 Aerodinámica del rotor de sustentación
rVi
ωφ arctan= (2.16)
Si φ es menor que 10°, lo cual es normal para la mayoría de rotores, entonces (una suposición para ángulos pequeños es utilizada) es aceptable establecer que:
rVi
ωφ = (2.17)
Por lo que el ángulo de ataque y el coeficiente de sustentación locales son respectivamente:
rVi
ωθα −= (2.18)
⎟⎠⎞
⎜⎝⎛ −=
rVkC i
L ωθ (2.19)
El incremento de sustentación sobre el elemento de pala es:
( ) cdrr
VkrdS i ⎟⎠⎞
⎜⎝⎛ −=
ωθωρ 2
2 (2.20)
2.4.2 Integración de la fuerza de tracción La fuerza de sustentación sobre la pala es la integración de la sustentación sobre todos los elementos de pala desde el eje de rotación hasta la punta de la pala. Al realizar la integración se debe considerar que la pala tiene torcimiento ideal. La mayoría de las palas de los helicópteros actuales están torcidas de forma tal que el ángulo de paso en la punta de la pala es menor que el ángulo de paso en la raíz. Siendo lo más común, el torcimiento lineal:
10 θθθRr
+= (2.21)
Donde θ es el ángulo de paso que tendría la pala si esta se extendiera hasta el eje de rotación y 1θ es el ángulo de torcimiento entre el eje de rotación y la punta de la pala. El valor de torcimiento lineal se encuentra en el intervalo de -5° a -16° [18]. Para palas con torcimiento ideal en lugar de torcimiento lineal, el valor del ángulo de paso local es:
15

Capítulo 2 Aerodinámica del rotor de sustentación
Rrt
/θ
θ = (2.22)
tθ es el ángulo de paso en la punta. El torcimiento ideal genera un mejor desempeño del
rotor que cualquier otro tipo de torcimiento, pero el margen de incremento sobre el torcimiento lineal es pequeño, es por eso que las palas de los rotores helicópteros se fabrican con torcimiento lineal en lugar de torcimiento ideal debido a la facilidad de cálculo, diseño y construcción. Previamente (2.17), se estableció que el ángulo de entrada de flujo es:
rVi
ωφ =
Esta expresión puede rescribirse:
Rrr
RR
V ti
/φ
ωφ == (2.23)
donde tφ es el ángulo de entrada de flujo en la punta. Sustituyendo las ecuaciones para el ángulo de paso y el ángulo de entrada de flujo en la punta de la pala en la ecuación para obtener la fuerza de sustentación (2.20) se obtiene:
( ) drRrRr
kcrdS tt ⎟⎠⎞
⎜⎝⎛ −=
//22 φθ
ωρ (2.24)
o también:
( rRkcd
)r
dStt φθωρ −= 2
2 (2.25)
drdT / representa la fuerza de sustentación por unidad de longitud a lo largo de la pala y
esta es lineal, describe una distribución triangular sobre los elementos de pala. La fuerza total de sustentación sobre la pala completa es proporcional al área del triángulo:
( )∫−=R
tt rdrRkcS0
2
2φθωρ (2.26)
Por lo que la fuerza de sustentación por pala es:
⎟⎠⎞
⎜⎝⎛ −
=22
22 ttkcRRSφθ
ωρ (2.27)
16

Capítulo 2 Aerodinámica del rotor de sustentación
y la fuerza total de tracción sobre el rotor es la fuerza de sustentación por el número de palas, N:
( ) NkcRRT tt ⎟⎠⎞
⎜⎝⎛ −
=22
2 φθωρ (2.28)
2.4.3 Relación entre la fuerza de tracción y el ángulo de paso
La ecuación (2.27), para la fuerza de tracción de un rotor con torcimiento ideal puede escribirse en forma adimensional:
( )( )2
2
22 RNcRCkcRRT Ttt
ωσρφθ
ωρ=⎟
⎠⎞
⎜⎝⎛ −
= (2.29)
o,
( ttT kC
φθσ
−=4
) (2.30)
Como el ángulo de entrada en la punta es:
rVi
t ωφ =
Y;
ATVi ρ2
=
Entonces:
( )
2/
221 2 σσ
ρωρ
ωφ TTT
tCC
AArC
r=== (2.31)
sustituyendo esta ecuación en (2.30), se obtiene:
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
2/
4σσ
θσ
Tt
T CkC (2.32)
17

Capítulo 2 Aerodinámica del rotor de sustentación
Despejando tθ :
⎥⎦
⎤⎢⎣
⎡+=
2/4 σσ
σθ TT
tCC
k (2.33)
Este ángulo es de gran importancia ya que a través de este se controla la fuerza de tracción, debido a que en ocasiones la velocidad inducida es pequeña en magnitud y es necesario mantener determinada fuerza de tracción, esto se logra aumentando el ángulo de paso en la pala y lógicamente el ángulo de ataque. El paso colectivo de una pala con torcimiento lineal puede ser relacionado con el ángulo de paso de una pala con torcimiento ideal a través de la siguiente expresión:
10 43
23 θθθ −= t (2.34)
2.4.4 Potencia El incremento de potencia, dP producido por un elemento diferencial de pala es:
ωdMdP = (2.35)
La variación del par torsional dM, es igual al arrastre sobre el elemento de pala, y sucede lo mismo que en aeronaves de ala fija, la fuerza de arrastre es generada por dos condiciones, la potencia inducida y la potencia de perfil. En la figura 6 se observa que debido a que la sustentación es perpendicular a la velocidad local, (de flujo), ésta está inclinada por el ángulo inducido. Entonces el arrastre inducido debido a la sustentación, dDi es:
φdSdDi = (2.36) La potencia de perfil, dDo, es la fuerza paralela al flujo local; y como φ es considerado como un ángulo pequeño, la componente de arrastre de perfil contribuyente al par torsional se toma como igual sobre todo el arrastre del perfil, el incremento de par torsional es:
( )dDdSrdM += φ (2.37)
18

Capítulo 2 Aerodinámica del rotor de sustentación
Figura 6. Sección transversal de la pala
La fuerza de arrastre, de manera similar a la de sustentación es:
( ) cdrCrdD D2
2ωρ
= (2.38)
Donde el coeficiente de arrastre CD puede ser considerado constante para este análisis. La ecuación para el incremento del par torsional puede ser escrita como:
( ) ( ) ⎥⎦⎤
⎢⎣⎡ += cdrCrcdrCrrdM DL
22
22ωρφωρ (2.39)
Utilizando las expresiones desarrolladas previamente para el CL y φ para un rotor idealmente torcido, el par torsional por unidad de longitud es:
( ) ( ) ⎥⎦
⎤⎢⎣
⎡+⎟
⎠⎞
⎜⎝⎛−= cCr
rRrRkcr
drdM
Dttt22
22ωρφφθωρ (2.40)
2.4.5 Integración de la potencia
La integración del par torsional se realiza de forma similar que para la fuerza de sustentación:
19

Capítulo 2 Aerodinámica del rotor de sustentación
( ) ⎥⎦⎤
⎢⎣⎡ +−= ∫
R
Dttt drrCrdrkRcbM0
322
2φφθω ∫
R
0
ρ (2.41)
La potencia es:
( ) ( )ωφ
φθωρω ⎥⎦
⎤⎢⎣⎡ +
−==
42222 D
ttt CkcRRbMP (2.42)
2.5 Método combinado
Con los modelos planteados previamente, modelo de momentum, en el cual se obtiene la velocidad inducida, supuesta como uniforme sobre el disco rotor y del modelo de elemento de pala, en el cual la distribución de flujo de entrada no es uniforme es posible obtener una ecuación más completa para determinar la velocidad inducida, ya que se incluyen las pérdidas por forma de la pala debido a su rotación dentro del fluido, esto se logra igualando sus respectivas expresiones para la fuerza de sustentación.
La ecuación (2.10) en forma diferencial es:
rdrVdT i24πρ= (2.43)
Igualando esta expresión con la ecuación (2.28) se obtiene la velocidad inducida:
( ) cdrr
VkrNrdrV ii ⎟
⎠⎞
⎜⎝⎛ −=
ωθωρπρ 22
24 (2.44)
022
4 22 =−+ θωωπ rkcNckVNV ii (2.45)
π
θπωωω
8
822
22
NkcrNkcNkc
Vi
+⎟⎠⎞
⎜⎝⎛+−
= (2.46)
Ésta es una ecuación general para determinar la magnitud de la velocidad inducida a cualquier radio, r. Puede utilizarse cualquier tipo de torcimiento usando el valor adecuado de ángulo de paso θ en la estación de la pala y también puede ser utilizada con cualquier tipo de forma de pala, considerando tan sólo el valor correcto de la cuerda c. Una vez que se determinó la velocidad inducida se sustituye en la ecuación (2.28) para determinar la fuerza de tracción y con esto poder determinar la potencia (2.42)
20
Capítulo 2 Aerodinámica del rotor de sustentación
2.6 Método de vórtice Aparte del método de momentum, el método de elemento de pala y el método
combinado existe otro método, el método de vórtice, en este método se toma en cuenta la existencia de vórtices en la punta y la raíz de las palas, además se consideran los choques entre el flujo que se desprende en la pala que avanza con el flujo de la pala que retrocede. Estos choques tienen gran impacto sobre la velocidad inducida y en la carga sobre las palas.
El tratar de describir y cuantificar los fenómenos que ocurren dentro de la estela
del rotor da por resultado un problema complejo, una integración para evaluar dicho modelo debe ser hecha numéricamente, la cual se puede resolver prácticamente sólo con la ayuda de computadoras de alta velocidad y se debe considerar para esto, la aplicación de un modelo que contemple la existencia de vórtices dentro de la estela generados por el funcionamiento del rotor, dicho modelo debe ser universal y contener la información detallada del campo de flujo y la carga requerida.
Existe una versión simple del método de vórtice en la cual se utiliza un modelo de
disco actuador. Para este caso se desprecian los efectos particulares del flujo sobre el rotor y en la estela asociado con un número finito de palas, y se distribuye la vorticidad en el volumen de la estela, el modelo de disco actuador produce un problema matemático relativamente sencillo. Como se considera el mismo modelo que en método de momento, la teoría de vórtice proporcionara resultados idénticos. Sin embargo; la teoría de vórtice es más apropiada que la teoría de momento para extensiones del modelo (por ejemplo para carga en el disco no uniforme), debido a que se basa en consideraciones de características de flujo local más que en sus propiedades globales [11].
El desarrollo y aplicación del modelo de vórtice están fuera del alcance del presente trabajo de tesis. 2.7 Pérdida en las puntas
El método de sustentación uniforme no es estrictamente válido cerca de la punta del rotor. Cuando la cuerda en la punta es finita, el modelo de elemento de pala arroja un valor de fuerza de sustentación diferente de cero para las zonas que están hasta el fin de la pala, sin embargo, la carga cae hasta cero en la punta a una distancia finita debido a los efectos de flujo tridimensional en la punta. Como la presión dinámica es proporcional a
2r , la carga para un ala rotativa se concentra en la punta y la caída es mas rápida que para un ala fija. La pérdida de sustentación en la punta es un factor importante en el cálculo del desempeño del rotor; si esta pérdida es despreciada, la fuerza de sustentación para una potencia dada será significativamente sobreestimada. Atención especial merece la carga en la punta ya que requiere un análisis superficial de sustentación, sin embargo se puede hacer una aproximación de las pérdidas en la punta.
21

Capítulo 2 Aerodinámica del rotor de sustentación
Dichas pérdidas pueden representarse en términos de vórtices. El modelo de disco actuador, con carga diferente de cero extendida hasta el límite del disco, es aceptable. Entonces la pérdida en la punta puede considerarse como la influencia de un número finito de palas, es decir; la concentración de carga sobre un número finito de palas, sólo que distribuida sobre el disco, tomando en cuenta los efectos tridimensionales de la estela sobre el flujo a través del rotor. Con un número finito de palas, los vórtices en la estela contraen el flujo en un volumen menor que la estela en la frontera. Las pérdidas en la punta en este sentido tienen un área efectiva menor en la estela, o equivalentemente una carga efectiva alta en el disco, lo que implica una potencia inducida alta.
Un método aproximado para cuantificar las pérdidas en la punta es asumir que los
elementos de pala fuera de la estación en el radio r = BR tienen un perfil que tiene arrastre pero que no genera sustentación. El parámetro B se conoce como factor de pérdida en la punta, existen varios métodos para calcular el valor de dicho factor. Prandtl estableció una expresión basada en un modelo bidimensional de la estela, para flujo bajo de entrada:
NC
B T21−= (2.47)
Donde N es número de palas. El valor típico para el resultado de Prandtl [18], se encuentra entre B = 0.96 y B = 0.98
Rrc
Rt
B C
2)1(1
211 =
−=−= ; (2.48)
Donde tC es la cuerda en la punta. Es posible también, cuantificar la pérdida en las puntas por medio de la expresión:
RrcB )7.0(
321 =
−= (2.49)
Frecuentemente, el factor de pérdida en la punta es cercano a 0.97, el cual generalmente coincide con datos experimentales.
La reducción en la fuerza de sustentación del rotor es de 6 a 9% gracias a las pérdidas en la puntas y en la raíz de las palas. Dichas pérdidas se reflejan en la potencia requerida debido al incremento de la velocidad inducida.
La potencia inducida aumenta 3% debido a las pérdidas en las puntas
( )03.11 ≅= −BK . Otros factores, particularmente un flujo de entrada no uniforme, también incrementan la potencia inducida [18].
22

Capítulo 2 Aerodinámica del rotor de sustentación
Existen aproximaciones mas rigurosas para el cálculo del desempeño del rotor incluyendo las pérdidas en la punta, tales como el método de vórtice para un número finito de palas. Éste análisis es bastante complejo, sin embargo, en algunos casos se simplifica haciendo consideraciones sobre las características del flujo y la distribución de los vórtices. El factor de pérdidas en la punta es ciertamente; una representación un tanto burda de los efectos tridimensionales, pero debido a su sencillez y relativa exactitud su uso es aceptable. 2.8 Claro en la raíz Existen pérdidas en la raíz que afectan al desempeño del rotor. La sustentación en la pala inicia en la estación, 0 a r, la cual está de 10 a 30% del radio de la pala. Antes de éste existe un claro o espacio. El punto en donde inicia esta estación es justo después del núcleo y articulaciones. El espacio anterior al inicio de dicha estación, es un área con gran arrastre y baja sustentación, por lo que la expresión de la teoría de elemento de pala para sustentación debe integrarse de 0 a r y de r a R. En vuelo estacionario, el efecto de este espacio; es una reducción en el área efectiva del disco rotor y un incremento en la carga alar y en la velocidad inducida. Para representar al espacio libre en la raíz y la pérdida en las puntas se introduce el parámetro K, para determinar el área afectiva y con esta calcular la potencia inducida,
( ) 2/122 −−== R
eff
rBAAK (2.50)
Generalmente el efecto que tiene el espacio en la raíz sobre la potencia inducida es menor que el producido por la pérdida en las puntas.
Al revisar los métodos planteados dentro de este capítulo se establece que el método de elemento de pala es una buena aproximación y sirve como base en la mayoría de los análisis aerodinámicos para helicópteros porque éste considera a detalle el flujo y la carga sobre la pala, obteniéndose con esto el desempeño y características aerodinámicas necesarias para un diseño eficiente del rotor. En contraste, el método de momentum (o análisis de disco actuador) es un análisis global, del cual se obtienen valores aproximados que no pueden usarse para el diseño del rotor. Siendo el método combinado el que se toma como el más exacto para el diseño.
En el siguiente capítulo se plantea, se desarrolla y se muestra la solución de un
nuevo modelo para calcular la fuerza de tracción y la potencia inducida en un rotor de levantamiento, este modelo está basado en los métodos mencionados previamente.
23

Capítulo 3 Modelo matemático y aplicación
CAPÍTULO 3 MODELO MATEMÁTICO Y APLICACIÓN En el presente capítulo se propone un modelo matemático y se muestra su solución, dicho modelo está compuesto por dos ecuaciones, una para calcular la fuerza de tracción y otra para obtener la potencia inducida.
24

Capítulo 3 Modelo matemático y aplicación
3.1 Modelo matemático Dentro de los métodos existentes para el cálculo de las características aerodinámicas en rotores de sustentación, método de momentum, elemento de pala y combinado se hacen diversas suposiciones para llegar a establecer una solución práctica y sencilla para estos modelos. Sin embargo, a pesar de que se tienen resultados aceptables, estos sólo son aproximaciones, por lo que en últimos tiempos las investigaciones se han enfocado a determinar completamente las características del fluido (estela) y los efectos que tiene ésta en la operación del rotor y la configuración aerodinámica y geométrica óptima de éste. Una de las limitantes obvias es la resolución y cuantificación de las pérdidas de potencia debidas a la existencia de vórtices, se pueden obtener expresiones que describan el efecto global de estos, si se requiere describir el campo de flujo completo y determinar su comportamiento y efectos particulares, sólo es posible hacerlo con ayuda de supercomputadoras. El modelo que se plantea en el presente trabajo está basado en los métodos descritos en el capítulo previo, la diferencia; es que sólo se considera el disco efectivo de sustentación y todas las demás variables están parametrizadas; es decir se dejan en función del radio de la pala con la finalidad de que este sea el la única variable a considerar en la integración y solución del mismo. Se establecen algunas restricciones igual que en los métodos clásicos. Para el presente caso se considera que el estado operativo será el vuelo estacionario, palas con cuerda constante, el torcimiento geométrico será lineal, es decir; α que es el ángulo de ataque del perfil siempre será constante y, φ que es el ángulo de entrada de flujo va a variar respecto a la velocidad rotacional por ser ésta función del radio r. La condición de optimización del rotor está dada por la razón de considerar el torcimiento de la pala en conjunto con las demás características geométricas y de operación de éste. 3.2 Determinación de la fuerza de tracción
En la figura 7 se muestra un elemento de pala con las componentes de velocidad y fuerza que se generan sobre éste al estar incidiendo la corriente de viento sobre él, debidas a los ángulos de paso θ , de ataque de perfil α y el de incidencia del viento φ , también conocido como ángulo inducido.
25

Capítulo 3 Modelo matemático y aplicación
Figura 7. Velocidades, fuerzas y ángulos sobre el elemento de pala
La expresión que define a la fuerza de sustentación sobre un ala es:
LACVS 2
21 ρ= (3.1)
Donde ρ – densidad )/( 3mkgV – Velocidad del viento (m/s) A – Área del elemento de pala )( 2mCL– Coeficiente de sustentación local (adim) Y para la fuerza de arrastre se tiene:
D2ACV
21D ρ= (3.2)
Donde ρ – densidad )/( 3mkgV – Velocidad del viento (m/s) A – Área del elemento de pala )( 2mCD– Coeficiente de arrastre local (adim)
26

Capítulo 3 Modelo matemático y aplicación
Escribiendo en forma diferencial la ecuación (3.1);
( ) kcdrVrdS i αωρ 222
21
+= (3.3)
( )222
iVr +ω representa , obtenida por medio del Teorema de Pitágoras: 2iV
( )[ ]222
iVrV += ω (3.4) Donde
rω - velocidad rotacional (m/s) Vi – velocidad inducida (m/s) El área del elemento de pala con envergadura dr es:
cdrA = (3.5) Donde: c - cuerda de la pala (m). Y el CL se puede expresar:
kCL α= (3.6) Donde: α – ángulo de ataque local (grados) k – pendiente de la curva de sustentación (CL/rad) Haciendo lo mismo para la ecuación (3.2):
( ) ( )baCcdrVrdD Li ++= 2222
21 ωρ (3.7)
El CD se obtiene a partir de la curva polar:
baCC LD += 2 (3.8) Esta curva representa la variación del coeficiente de arrastre respecto al coeficiente de sustentación para un ángulo de ataque determinado.
27

Capítulo 3 Modelo matemático y aplicación
En la figura 5 se aprecia que el diferencial de la fuerza de sustentación dS y el diferencial de fuerza de arrastre dD sobre el perfil contribuyen a aumentar y disminuir respectivamente la fuerza de tracción T, esto debido a sus respectivas proyecciones sobre el eje de las ordenadas. El ángulo de entrada ó de incidencia de viento se obtiene a través de la velocidad inducida y de la velocidad rotacional, mutuamente perpendiculares entre sí:
r
Vi
ωφ arctan= (3.9)
Realizando la sumatoria de fuerzas en el eje de las ordenadas se obtiene:
( ) ( ) ( ) φαωρφφθωρ senbkacdrVrkcdrVrdTdF iiy )(21cos
21 22222222 ++−−+==
(3.10) Si φ es menor que 10°, se establece que:
rVi
ωφφ ==arctan (3.11)
Por lo que el ángulo de ataque y el coeficiente de sustentación locales son respectivamente:
γθα −= (3.12)
r
Vi
ωθα −= (3.13)
⎟⎠⎞
⎜⎝⎛ −=
rVkC i
S ωθ (3.14)
Finalmente, sustituyendo estas expresiones en la ecuación (3.10) se obtiene:
( ) drr
Vsenbkr
Var
Vr
VkVrcdT iiiii
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛ −−⎟
⎠⎞
⎜⎝⎛ −+=
ωωθ
ωωθωρ 2
2222 cos
21 (3.15)
Integrando de r a R y de 0 a 2π, por ser el recorrido de 360° de la pala sobre su eje de rotación, el cambio en la posición angular o azimutal esta representado por ψ :
28

Capítulo 3 Modelo matemático y aplicación
( ) drdr
Vsenbkr
Vr
Var
Vr
VkVrcNT iiiiii
R
rψ
ωωωθθ
ωωθωρ
ππ
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛+−−⎟
⎠⎞
⎜⎝⎛ −+= ∫ ∫ 2
22
222222
02cos
21
2
(3.16)
Donde: r- radio en la raíz (m) R - radio en la punta (m) N - número de palas (adim) Se obtiene:
Nr
VbrVi
rV
bsenrr
VaCikV
rV
asenrkVir
VarkV
rV
asenkrVr
VakrV
rV
asenkrr
VbCiV
rV
rbsenVr
VakVi
rV
aSikV
rV
aCikVr
VasenrkV
rV
senkrVr
Vkr
rV
kCiV
rV
ksenrVr
VkrV
rV
SikVr
VrkVcT
iiii
iii
ii
ii
iii
ii
iii
ii
ii
ii
iii
ii
ii
ii
ii
⎟⎟⎠
⎞⎟⎟⎠
⎞⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+
⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛−
⎜⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛⎜⎜⎝
⎛−⎟
⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛−−=
ωω
ωω
ω
ωω
ωθω
ωθω
ωθω
ωθω
ωωω
ωωθ
ωθ
ωθω
ωθω
ωθω
ω
ωω
ωω
ωθ
ωθωρ
ω
cos26
6cos66cos
255cos66
55cos23
3cos35cos512
1
223323
22222222222
2233322323
22322222333
22232
(3.17)
Esta es la ecuación general para la fuerza de tracción, el desarrollo para obtenerla se muestra en el apéndice A. 3.3 Determinación de la potencia inducida
Al igual que se hizo para la determinación de la fuerza de tracción para obtener la potencia es necesario primero determinar el momento generado en el perfil, éste se debe principalmente a la fuerza de arrastre, sin embargo la fuerza de sustentación también contribuye, y a partir de esto obtener la potencia.
MrdFx =× (3.18)
ωMPot = (3.19)
29

Capítulo 3 Modelo matemático y aplicación
Para determinar la magnitud de esta fuerza se realiza una sumatoria de fuerzas pero ahora en el eje de las abcisas se consideran las proyecciones sobre dicho eje de los diferenciales de fuerza de sustentación y de arrastre, dS y dD; respectivamente:
( ) ( ) ( )( ){ }[ ]drbkasenVrcdF iX φφθφφθωρ cos21 22222 +−+−+= (3.20)
Reordenando términos:
( ) drr
Vbkr
Var
Vsenr
VVrcdF iiiiiX
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛ −+=
ωωθ
ωωθωρ cos
21 2
2222
(3.21) Integrando de r a R:
( ) drdr
Vbkr
Vr
Var
Vsenr
VkVrcrNFR
riiiii
iX ψωωω
θωω
θωρπ
π
∫ ∫ ⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛+−+⎟
⎠⎞
⎜⎝⎛ −+= cos2
21
22
22
222222
0
(3.22) Se obtiene:
Nr
VasenkV
rV
bSiVr
VrbV
rV
bsenrVr
Vbr
rV
aSikV
rV
arkVr
VaCikV
rV
asenrkVr
VakrV
rV
aSikVr
VarkV
rV
asenkrVr
Vakr
rV
CikVr
VsenrkV
rV
kSiVr
VrkV
rV
ksenrV
rV
CikVr
VsenrkV
rV
krVr
VsenkrcF
ii
ii
ii
ii
iii
ii
ii
ii
ii
ii
ii
ii
i
ii
ii
ii
ii
ii
ii
ii
ii
iX
⎟⎟⎠
⎞⎟⎟⎠
⎞⎟⎠
⎞⎜⎝
⎛−
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+
⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛−
⎜⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎜⎜⎝
⎛⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛=
ω
ωωω
ωω
ωω
ω
ωω
ωθ
ωθω
ωθω
ωθ
ωθω
ωθω
ωθω
ωθ
ωθω
ωωω
ωω
ωθ
ωθω
ωθω
ωθωρ
ω
23
32223323
222322222
22322222222233
323222
322233
6
5cos5cos26
cos666cos6
5cos5cos2
69cos33
cos221
(3.23)
30

Capítulo 3 Modelo matemático y aplicación
Esta ecuación se evalúa en los límites de r a R, para obtener la fuerza horizontal (eje de las abcisas) total que existe en la pala y finalmente se multiplica por r, ecuación (3.18), para obtener el par y por ω para obtener la potencia ecuación (3.19). El desarrollo para obtenerla se muestra en el apéndice B. Como se estableció previamente, esta ecuación por tener la característica de ser general, puede aplicarse a cualquier tipo de rotor siempre y cuando éste se encuentre en estado operativo de vuelo estacionario y respetando las restricciones planteadas en el presente capítulo, se aplica para palas con cuerda constante y torcimiento geométrico lineal, aunque también puede incluirse el valor de θ para torcimiento ideal, ecuación (2.22) y volver a integrar aunque el análisis será más complejo ya que este ángulo es el óptimo para cada estación en la pala.
Se puede apreciar que en el modelo descrito en el presente capítulo se toman algunas características de planteamiento del elemento de pala, se establecen todas las variables de operación, se aplica el método y finalmente se hace un barrido de pala de 360°. Sin embargo; a pesar de que está basado en los métodos existentes, no se hacen todas las restricciones que se hacen en aquéllos. Para evaluar el modelo matemático propuesto se utilizan las características geométricas y condiciones de operación del rotor principal de un helicóptero real. Dichas características (apéndice C) son evaluadas también con los métodos aerodinámicos clásicos como son el método de momentum, el método de elemento de pala y el método combinado, los resultados obtenidos para la fuerza de sustentación y potencia inducida en estos, son comparados con los del modelo matemático propuesto. Finalmente se obtiene el valor de la figura de mérito para establecer el índice de eficiencia de dicho modelo matemático. La geometría del rotor y los componentes que lo integran son útiles debido a que el modelo matemático es general y puede aplicarse a todo tipo de condiciones geométricas y de operación siempre que se trate de vuelo estacionario.
31

Capítulo 4 Comparación del modelo matemático
CAPÍTULO 4 COMPARACIÓN DEL MODELO MATEMÁTICO. En este capítulo se hace una comparación entre los resultados obtenidos del modelo matemático propuesto y los valores arrojados al sustituir las características físicas y de operación de rotor en el método de momentum, método de elemento de pala y método combinado. Además se incluye el cálculo de la figura de mérito para el modelo matemático propuesto.
32
Capítulo 4 Comparación del modelo matemático
4.1 Comparación del modelo matemático.
En el capítulo 3 se planteó y se mostró el resultado del modelo matemático propuesto en el presente trabajo de investigación, a continuación se realizan los cálculos de la fuerza de tracción y de potencia inducida con los métodos de cálculo aerodinámico descritos en el capítulo 2, el método de momentum, método de elemento de pala y método combinado.
Las características físicas y de operación del rotor principal del helicóptero
AEROSPATIALE As 350B, (apéndice C); son sustituidas en estos métodos al igual que en modelo matemático propuesto, esto con el fin de comparar los resultados.
Finalmente, se calcula la figura de mérito para el modelo matemático propuesto y
definir cuanto más eficiente será un rotor diseñado con este modelo en comparación con el diseño a través de los métodos aerodinámicos clásicos de diseño.
Los cálculos para la fuerza de tracción y la potencia inducida se realizan con el
valor del radio en la punta R, por ser donde se registra la mayor magnitud de la fuerza de tracción y de la potencia inducida; ya que éstas son funciones de la velocidad tangencial
Rω . 4.2 Resultados del método de momentum Primeramente se realiza el cálculo de la fuerza de tracción y potencia inducida para el método de momentum, por ser éste el método ideal, los resultados obtenidos de dicho servirán como base de comparación de los otros métodos y el modelo matemático propuesto. La fuerza de tracción será igual al peso del aparato, utilizando la ecuación (2.1) se obtiene:
(2.1) maTF ==→
( ) NsmkgT 5.1912981.91950 2 =⎟⎠⎞
⎜⎝⎛=
Ya que se conoce la magnitud de la fuerza de tracción es posible determinar la potencia inducida, ecuación (2.11):
33

Capítulo 4 Comparación del modelo matemático
A
TPi ρ2
23
= (2.11)
( )
( )kW
mmkg
kNPi 5.17875.89225.12
1.19
23
23
=
⎟⎠⎞
⎜⎝⎛
=
El cálculo de la velocidad inducida, velocidad en el disco rotor, es necesario para obtener el ángulo de entrada de flujo, despejando Vi de la ecuación (2.10) se obtiene:
A
TVi ρ2= (2.10)
( ) sm
mmkg
kNVi 32.975.89225.12
1.192
3
=⎟⎠⎞
⎜⎝⎛
=
En la figura 8 se muestra la gráfica de fuerza de tracción a lo largo de la pala obtenida aplicando el método de momentum:
Figura 8. Fuerza de tracción en el método de momentum
34

Capítulo 4 Comparación del modelo matemático
En la figura 9 se muestra la gráfica para la potencia inducida obtenida aplicando el método de momentum:
Figura 9. Potencia inducida en el método de momentum
4.3 Resultados del método de elemento de pala
En el cálculo previo para el método de momentum se obtuvo el valor de la velocidad inducida, aplicando la ecuación (2.17) se obtiene el ángulo de entrada de flujo o ángulo inducido:
r
Vi
ωφ = (2.17)
ot rad
smsm
5.20437.0213
32.9===φ
Después se calcula el ángulo de paso local de la pala, para ello es necesario determinar el valor de la relación entre el coeficiente de tracción del perfil y la solidez de la pala, despejando de la ecuación (2.29):
35

Capítulo 4 Comparación del modelo matemático
( )2rATC
p
T
ωρσ= (2.29)
( )( )( )( )071.0
213345.53.03225.1
1.192
3
=⎟⎠⎞
⎜⎝⎛
=mm
mkg
kNCT
σ
Calculando el ángulo de paso, ecuación (2.33):
⎥⎦
⎤⎢⎣
⎡+=
2/4 σσ
σθ TT
tCC
k (2.33)
( ) ( )( ) ot rad 2.509.0
2071.00536.0071.0
64
==⎥⎦
⎤⎢⎣
⎡+=θ
Con los valores de los ángulos inducido y de paso se calcula la fuerza de tracción, ecuación (2.28):
( ) NkcRRT tt ⎟⎠⎞
⎜⎝⎛ −
=22
2 φθωρ (2.28)
( )( ) Nradradmmrads
mmkg
T 34.1804632
04.009.0345.53.062132
225.1 23=⎟
⎠⎞
⎜⎝⎛ −
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛=
La potencia se determina a través de la ecuación (2.42):
( ) ( )ωφ
φθωρω ⎥⎦
⎤⎢⎣⎡ +
−==
42222 D
ttt CkcRRbMP (2.42)
( )( ) ( )⎟⎠⎞
⎜⎝⎛⎥⎦
⎤⎢⎣
⎡+
−⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
==s
radrad
mmsmm
kg
MP ttt 85.39
40065.0
26345.53.0213
2
225.13 2
23
φφθ
ω
36

Capítulo 4 Comparación del modelo matemático
kWP 5.222= El valor de CD se obtiene de la curva de sustentación, (apéndice D), con para un valor de ángulo de ataque, α = 2.5°. En la figura 10 se muestra la gráfica de la fuerza de tracción a lo largo de la pala calculada por medio del método de elemento de pala muestra:
Figura 10. Fuerza de tracción en el método de elemento de pala
En la figura 11 se muestra la gráfica para la potencia inducida obtenida aplicando el método de elemento de pala:
37

Capítulo 4 Comparación del modelo matemático
Figura 11. Potencia Inducida en el método de elemento de pala
4.4 Resultados del método combinado Para aplicar el método combinado se calcula nuevamente el valor de la velocidad inducida, pero ahora con la ecuación (2.46):
π
θπωωω
8
822
22
NkcrNkcNkc
Vi
+⎟⎠⎞
⎜⎝⎛+−
= (2.46)
( ) ( ) ( ) ( )( ) ( ) ( )( )
π
θπ
8
14.53.06385.3982
3.06385.39
2
3.06385.39 2
2
mmrads
radradm
radsradm
radsrad
vi
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛+
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
+⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
−
=
38

Capítulo 4 Comparación del modelo matemático
smVi 28.9=
con este valor de velocidad inducida, se calcula nuevamente el ángulo inducido, ecuación (2.17):
r
Vi
ωφ =
orad
smsm
49.20435.0213
28.9===φ
Con dicho ángulo se calcula la fuerza de tracción, ecuación (2.28) y la potencia inducida, ecuación (2.42) para el método combinado:
( ) NkcRRT tt ⎟⎠⎞
⎜⎝⎛ −
=22
2 φθωρ
( )( ) Nradmmrads
mmkg
T 05.1811332
0435.009.0345.53.062132
225.1 23=⎟
⎠⎞
⎜⎝⎛ −
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛=
( ) ( )ωφ
φθωρω ⎥⎦
⎤⎢⎣⎡ +
−==
42222 D
ttt CkcRRbMP
( )( ) ( ) ( ) ⎟⎠⎞
⎜⎝⎛⎥⎦
⎤⎢⎣
⎡+
−⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
==s
radradradradrad
mmsmm
kg
MP 85.394
0065.00435.02
0435.009.06345.53.02132
225.13 2
23
ω
kWP 4.222=
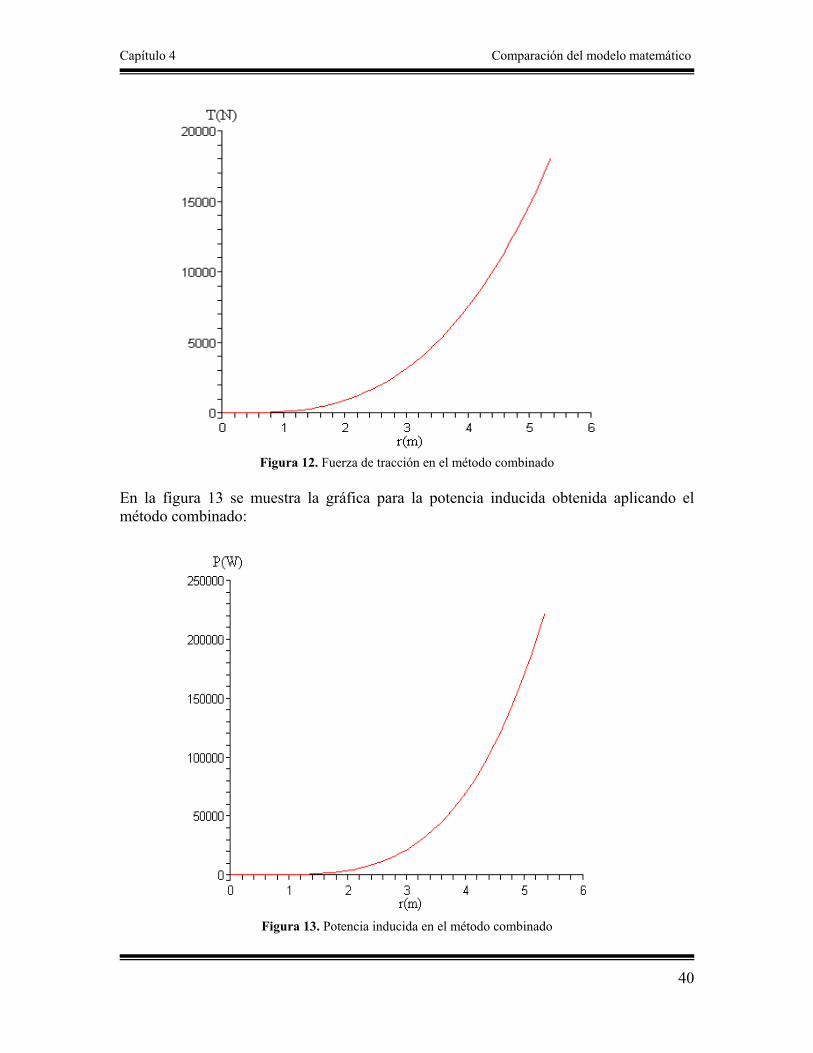
En la figura 12 se muestra la gráfica de la fuerza de tracción a lo largo de la pala por el método combinado:
39
Capítulo 4 Comparación del modelo matemático
Figura 12. Fuerza de tracción en el método combinado
En la figura 13 se muestra la gráfica para la potencia inducida obtenida aplicando el método combinado:
Figura 13. Potencia inducida en el método combinado
40

Capítulo 4 Comparación del modelo matemático
4.5 Resultados del modelo matemático propuesto Para la fuerza de tracción ecuación (3.17) se obtuvo:
NT 72.19787=
Este valor de la fuerza de tracción es el valor total de la fuerza que existe en el rotor pero sin considerar la pérdida de tracción el la punta y el claro de raíz en las palas, calculando estas pérdidas, ecuaciones (2.48) y (2.50) respectivamente:
96.0)345.5(2
)3.0(1211 =−=−=
mm
RtB C (2.48)
( ) ( ) 03.13.097.0 2/1222/122 =−=−==−−
Reff
rBAAK (2.50)
De acuerdo con estos cálculos, ecuaciones (2.48 y 2.50) La pérdida de fuerza de tracción en las puntas es del 4% y el incremento en la potencia inducida es de 3%, por lo que la fuerza neta de tracción que existe en el rotor es:
NT 21.18330=
En la figura 14 se muestra la gráfica de la fuerza de tracción obtenida con el modelo matemático propuesto:
Figura 14. Fuerza de tracción en el modelo matemático propuesto
41

Capítulo 4 Comparación del modelo matemático
La potencia obtenida a través del modelo ecuación (3.23) es:
WP 57.228850=
Este es el valor de la potencia inducida que existe en el rotor, pero la pérdida en las puntas genera un aumento en esta potencia, 3% generalmente [18], así que la magnitud de la potencia inducida real que se desarrolla en el rotor es:
WP 08.235716= Con los datos de potencia inducida del modelo matemático y la potencia inducida calculada en el método de momentum se puede obtener el valor de la figura de Mérito, ya que la potencia inducida obtenida en el método de momentum es la potencia ideal:
76.07.2355.178
==kWkWFM
%76=MF Este valor se encuentra dentro del intervalo de eficiencia de los rotores existentes, 70% a 85% [11 y 18], pudo ser mayor si se hubiese aplicado a un rotor con torcimiento geométrico ideal. En la figura 16 se muestra la gráfica para la potencia inducida obtenida aplicando el método propuesto:
Figura 15. Potencia inducida en el modelo matemático propuesto
42
Capítulo 4 Comparación del modelo matemático
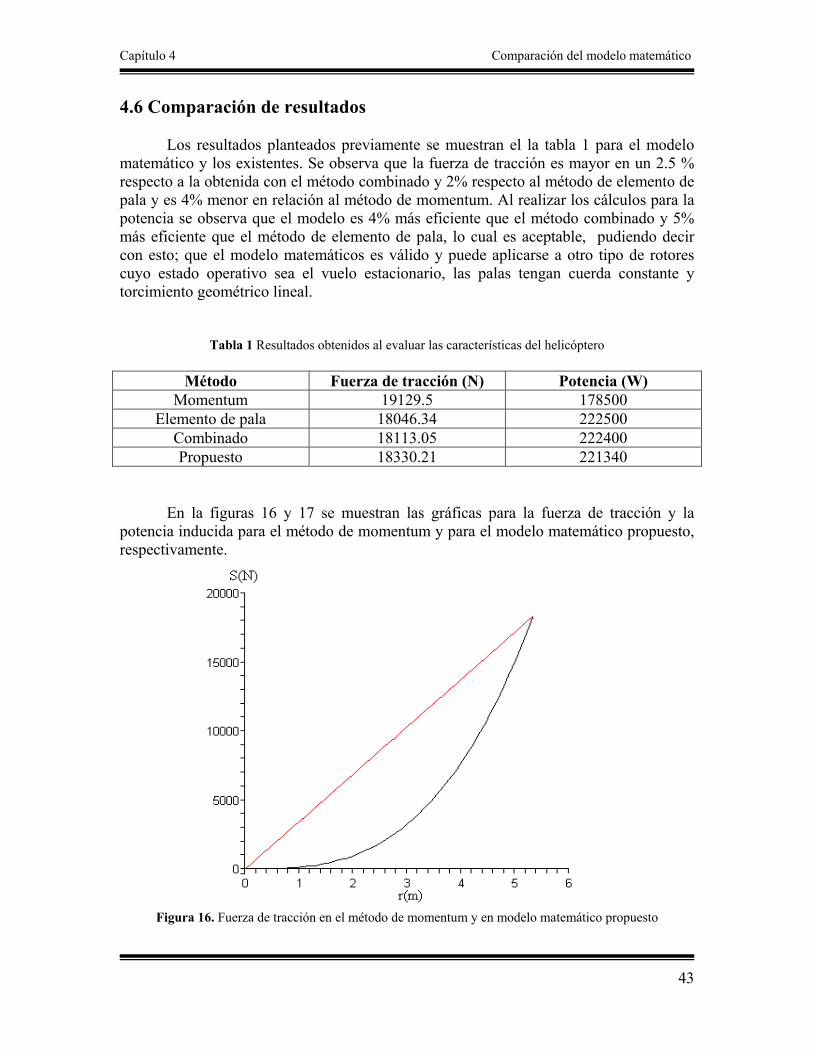
4.6 Comparación de resultados Los resultados planteados previamente se muestran el la tabla 1 para el modelo matemático y los existentes. Se observa que la fuerza de tracción es mayor en un 2.5 % respecto a la obtenida con el método combinado y 2% respecto al método de elemento de pala y es 4% menor en relación al método de momentum. Al realizar los cálculos para la potencia se observa que el modelo es 4% más eficiente que el método combinado y 5% más eficiente que el método de elemento de pala, lo cual es aceptable, pudiendo decir con esto; que el modelo matemáticos es válido y puede aplicarse a otro tipo de rotores cuyo estado operativo sea el vuelo estacionario, las palas tengan cuerda constante y torcimiento geométrico lineal.
Tabla 1 Resultados obtenidos al evaluar las características del helicóptero
Método Fuerza de tracción (N) Potencia (W) Momentum 19129.5 178500
Elemento de pala 18046.34 222500 Combinado 18113.05 222400 Propuesto 18330.21 221340
En la figuras 16 y 17 se muestran las gráficas para la fuerza de tracción y la potencia inducida para el método de momentum y para el modelo matemático propuesto, respectivamente.
Figura 16. Fuerza de tracción en el método de momentum y en modelo matemático propuesto
43

Capítulo 4 Comparación del modelo matemático
Figura 17. Potencia inducida en el método de momentum y en modelo matemático propuesto
En las curvas mostradas en la figuras previas 16 y 17 se aprecia la diferencia que
existe entre el método ideal y el modelo propuesto, tanto para la potencia inducida como para la fuerza de tracción. La diferencia se debe a que el método de momentum es un modelo totalmente idealizado en el cual las pérdidas de energía no están contempladas, mientras que en el modelo propuesto se consideran éstas además de las condiciones geométricas de la pala como son su longitud, perfil, ángulo de paso y cuerda. Otra razón por la cual difieren estas curvas es porque las pérdidas de tracción y el aumento de potencia inducida en la raíz y en la punta de la pala si se incluyen después del calculo de esta fuerza con el modelo propuesto.
Sin embargo; a pesar del gran desarrollo de las herramientas computacionales y la constante investigación, aún existen algunos tipos de configuración y condiciones de vuelo que no se han podido conocer a plenitud, debido a que no ha podido determinar completamente el entorno del rotor en operación, éste es bastante complejo por la existencia de vórtices, los problemas a resolver incluyen el desempeño en sistemas multirotor y vuelo cerca del suelo, así como las características aerodinámicas para vuelo en descenso.
La solución de estos problemas; así como el planteamiento de métodos de diseño
multidisciplinarios en los cuales se incluyan análisis aerodinámicos, dinámicos y estructurales dentro de un mismo análisis global; acompañado de nuevos códigos computacionales, es sin duda el reto a superar para futuras investigaciones.
44

CONCLUSIONES
CONCLUSIONES
45

CONCLUSIONES
CONCLUSIONES
Al evaluar los datos del helicóptero con los métodos de diseño aerodinámico
conocidos, se establece que el método de momentum sólo se toma como referencia por ser un método ideal, ya que en éste no se consideran ningún tipo de pérdidas. El método de elemento de pala es una buena aproximación y sirve como base en la mayoría de los análisis aerodinámicos para rotores de sustentación, porque dentro de él se toman en cuenta las perdidas que se generan por la incidencia del flujo sobre el perfil y el rotor completo; además de la carga sobre la pala, obteniéndose con esto el desempeño y características aerodinámicas necesarias para un diseño eficiente del rotor. Sin embargo, comparado con ambos, es el método combinado el que se establece como el más confiable para el diseño. Al sustituir los datos en las expresiones desarrolladas en este trabajo para la fuerza de tracción y potencia, la eficiencia del rotor fue mejor en un 4% respecto al método combinado y 5% en relación al método de elemento de pala. Dato obtenido al calcular el valor de la figura de mérito para cada uno de ellos, siendo de 76% para las ecuaciones desarrolladas en el modelo matemático propuesto. La magnitud de la fuerza de tracción también mostró una mejoría de 2% respecto a la obtenida con el método combinado y de 2.5 % en relación a la calculada con el método de elemento de pala, y una variación de 4% respecto al método de momentum, siendo mayor la magnitud de esta fuerza en el método de momentum lógicamente.
Las dos ecuaciones desarrolladas en el modelo matemático propuesto son válidas; ya que se demostró que al aplicarse para el diseño aerodinámico de un rotor de sustentación existe una mejora en la fuerza de tracción y la potencia inducida para esa condición de fuerza de sustentación es menor, esto hace que el rotor sea más eficiente. Además ambas ecuaciones por tener la característica de ser generales, puede aplicarse a cualquier tipo de rotor siempre y cuando éste se encuentre en estado operativo de vuelo estacionario y las palas tengan cuerda constante. Aún cuando las ecuaciones propuestas están basadas en los modelos existentes, en éstas no se incluyen todas las restricciones que se hacen en aquéllos.
46
RECOMENDACIONES PARA TRABAJOS FUTUROS
RECOMENDACIONES PARA TRABAJOS FUTUROS
47

RECOMENDACIONES PARA TRABAJOS FUTUROS
RECOMENDACIONES PARA
TRABAJOS FUTUROS
Existen conceptos a considerar para una investigación posterior: El primero sería la inclusión de la fineza máxima dentro de las expresiones del modelo matemático debido a que con esta relación dicha relación se determina en que punto un perfil aerodinámico genera la máxima sustentación y se registra la menor cantidad de arrastre. Otro concepto básico es la existencia de palas que no tienen cuerda constante, ésta varía desde la punta de la pala hasta la raíz, a las palas que están configuradas de esta forma se dice que tienen agudeza. El incluir la agudeza dentro del desarrollo servirá para observar la variación de la fuerza de sustentación y lógicamente de la potencia inducida, además de permitir establecer la geometría óptima de la pala. Al hablar de geometría óptima se debe poner atención en el perfil a utilizar, se puede realizar un estudio paralelo con el fin de determinar cual es el perfil óptimo para las características operativas y físicas del helicóptero y con ello tener un diseño geométrico eficiente del rotor, además al encontrar cuál es el perfil óptimo, la fineza máxima estará incluida. El análisis estará completo si se considera la influencia de los vórtices generados tanto en la punta como en la raíz de la pala, dicho análisis es complejo por tratarse de un flujo con vórtices, si bien es cierto que existen expresiones para determinar la perdida que existe por la presencia de estos, dichas expresiones sólo cuantifican el fenómeno pero no lo describen. El cálculo y análisis aerodinámico para el diseño del rotor fue hecho en la condición operativa de vuelo estacionario, para tener un conocimiento más amplio del comportamiento del rotor deberán analizarse, las demás condiciones de vuelo conocidas, despegue, aterrizaje y vuelo en traslación. Finalmente, será conveniente construir un rotor a partir del presente análisis y ensayar pruebas experimentales en éste, con el fin de enriquecerlo y obtener un modelo en el que se describa cada vez más el comportamiento del rotor dentro de un flujo.
48

REFERENCIAS
REFERENCIAS
49
REFERENCIAS
REFERENCIAS
[1] Adelman, H.A. and Mantay, W.R. Status of Research on Multidisciplinary Rotorcraft Optimization at the Langley research Center. Proceeding of 46th Annual Forum of the American Helicopter Society. May 1990. [2] Chattopadhyay, A. and Walsh, J.L. Integrated Aerodynamic Load/Dynamic Optimization of Helicopter Rotor Blades, Journal of Aircraft, Vol. 28, No. 1, January 1991. [3] Chattopadhyay, A. and McCarthy, T.R. Optimum Design of Helicopter Rotor Blades with Multidisciplinary Couplings, AIAA Paper 90-0214, January 1992. [4] Celi, R. Recent Applications of Design Optimization to Rotorcraft- A Survey. Department of Aerospace Engineering Glenn L Martin Institute Technology of Maryland University. 2003. [5] Colin, T. and Celi, R. Helicopter Flight Dynamic Simulation with Refined Aerodynamics and Flexible Blade Modeling. Journal of Aircraft, Vol. 39, No. 4, July-August 2002. [6] De Matos, B. and Wagner, S. New Numerical Designed Advanced Helicopter Type Airfoils. 14th AIAA Applied Aerodynamics Conference, Part 1, June 17-20 1996. [7] De Matos, B. and Wagner, S. Numerical Design Transonic Wings. Proceedings of the 12th AIAA Aerodynamics Applied Conference, Colorado Springs, UA, June 1994. [8] Drela, M. XFOIL: An Analysis and Design System for Low Reynolds Number Airfoils. Conference on Low Reynolds number Aerodynamic, University Notre Dame, June 1989. [9] Drela, M. Two Dimensional Transonic Aerodynamic Design Method. AIAA Journal, vol. 25, No. 9, September 1989 [10] Fox R.W, Introducción a la Mecánica de fluidos, McGraw Hill, 1995. [11] Johnson, W. Helicopter Theory, Dover Books, 1994. [12] Kunz, D. Analysis of Prop-Rotor Whirl Flutter: Review and Update. 43rd AIAA Structures, Structural Dynamics and Materials Conference. April 22-25, 2002.
50
REFERENCIAS
[13] Kunz, D. and Jones, H. Modeling and Simulation of the Apache Rotor System CAMRAD II. NASA Langley Research Center. 2001. [14] Mantay, W.R. and Adelman H.A. Status of Research on Multidisciplinary Rotorcraft Optimization at the Langley Research Center, Proceedings of the 46th Annual Forum of the American Helicopter Society, May 1990. [15] Moffit, R.C and Bisell, J.R. Theory and Application of Optimum Airloads to Rotors in Hover and Forward Flight, Proceedings of the 38th of the Annual Forum of the American Helicopter Society, May 1982. [16] Nagashima, T and Nakanishi, K. Optimum Performance and Wake Geometry of a Coaxial Rotor in Hover. Vertica, Vol. 7, No. 3, 1983. [17] Newman, S. The Foundations of Helicopter Flight, Butterworth-Heinemann Ltd, 1994. [18] Prouty, R. Helicopter Performance, Stability and Control, PWS Publishers, 1986. [19] Quackenbush, Todd R. and Boschitsch, Alexander H. Rotor Design Optimization Using a Free Wake Analysis, NASA Contractor Report 177612, April 1993. [20] Reneaux, J. Numerical Optimization Method for Airfolild Design. Recherche Aérospatiale No. 5, 1984. [21] Stepniepski W.Z, Rotary Wing. Dover Publications, 1984. [22] Von Mises, R. Theory of Flight, Dover Books, 1959. [23] Walsh, J. L. and Bingham, G. J. Optimization Methods Applied to the Aerodynamic Design of Helicopter Rotor Blades, Journal of American Helicopter Society, Vol. 32, No. 4, October 1987. [24] White, F. Mecánica de Fluidos. McGraw Hill, 1988.
51

Apéndice A Integración de la fuerza de tracción
APÉNDICE A INTEGRACIÓN DE LA FUERZA DE TRACCIÓN
52

Apéndice A Integración de la fuerza de tracción
Integración de la ecuación de la fuerza de tracción Para resolver la ecuación para la fuerza de tracción (3.16), esta se descompone en los elementos que la constituyen y se realiza la integración de cada uno de ellos:
( ) drdr
Vsenbk
rV
rV
ar
Vr
VkVrcNT iiiii
i
R
rψ
ωωωθθ
ωωθωρ
ππ
⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛+−−⎟
⎠
⎞⎜⎝
⎛−+= ∫ ∫ 2
22
222222
02cos
21
2
ωω
ωω
θρ
ωθρ
2
coscos
21
2
2⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
iii
ii
ia
Vr
VSirr
VkcVdr
rVkcVT
ωω
ρ
ωωρ
2cos
21
3
2⎟⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛−=
rVkcCiV
drr
Vkc
rV
VT
ii
iiib
ωωω
ωω
ωω
ωρθ
ωθρω
12
coscos2cos
21
322233
22⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVSiV
rVrV
rVsenVr
rVrkc
drr
VkcrT
ii
ii
ii
i
ic
ωωω
ωω
ωρ
ωωρω
4
coscos
21
222
22⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVCiV
rVsenrV
rVrkcV
drr
Vkcr
VrT
ii
ii
ii
iid
Las cuatro expresiones previas corresponden a la primera parte de la integral, cuyo factor
común es el ⎟⎠⎞
⎜⎝⎛
rVi
ωcos .
Para la siguiente parte de la integral, se realiza el mismo procedimiento; salvo que ahora
el factor común es el ⎟⎠⎞
⎜⎝⎛
rVsen i
ω.
53

Apéndice A Integración de la fuerza de tracción
ωωω
ωθρ
ωθρ
221
222
222⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVCiV
rVrsencakV
drr
VsenkacVT
ii
ii
iie
ωω
θρ
ωωθρ
⎟⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVcSikaV
drr
Vsenk
rV
acVT
ii
iiif
23
22 221
ωω
ρ
ωωρ
2
cos
21
23
222
22
⎟⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVcakV
drr
Vsenk
rV
acVT
ii
iiig
ωωω
ωρ
ωρ
221
2
2⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVCiV
rVrsenbcV
drr
VbsencVT
ii
ii
iih
ωωω
ωω
ωω
ωρθ
ωθωρ
12
cos2
21
3223322
2222⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVCiV
rVrsenV
rVrV
rVsenrack
drr
VsenkarcT
ii
ii
ii
i
ii
ωω
ωω
ωθρ
ωωθωρ
22
21
2222
222⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛++⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVSiVirV
rVsenrackV
drr
Vsenkr
VarcT
ii
ii
iij
ωωω
ωρ
ωωωρ
221
22
222
222
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVCiV
rVrsenackV
drr
Vsenkr
VarcT
ii
ii
iik
ωωω
ωω
ωω
ωρ
ωωρ
12
cos2
21
322233
22⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVCiV
rVrsenV
rVrV
rVsenrbc
drr
VbsenrcT
ii
ii
ii
i
il
Ya que se han integrado cada uno de los elementos se realiza la suma de todos estos y se obtiene la solución para la fuerza de tracción:
54

Apéndice A Integración de la fuerza de tracción
Nr
VbrVir
Vbsenrr
VaCikV
rVasenrkVi
rVarkV
rVasenkrV
rVakrV
rVasenkr
rVbCiV
rVrbsenV
rVakVi
rVaSikV
rVaCikV
rVasenrkV
rVsenkrV
rVkr
rVkCiV
rVksenrV
rVkrV
rVSikV
rV
rkVcT
iiii
iii
ii
ii
iii
ii
iii
ii
ii
ii
iii
ii
ii
ii
ii
⎟⎟⎠
⎞⎟⎟⎠
⎞⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−
⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛
⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−−=
ωω
ωω
ω
ωω
ωθω
ωθω
ωθω
ωθω
ωωω
ωωθ
ωθ
ωθω
ωθω
ωθω
ω
ωω
ωω
ωθ
ωθωρ
ω
cos26
6cos66cos
255cos66
55cos23
3cos35cos512
1
223323
22222222222
2233322323
22322222333
22232
55

Apéndice B Integración de la ecuación de la fuerza horizontal
APÉNDICE B INTEGRACIÓN DE LA FUERZA HORIZONTAL
56

Apéndice B Integración de la ecuación de la fuerza horizontal
Integración de la ecuación de la fuerza horizontal Para resolver la ecuación para la fuerza horizontal (3.22), esta se descompone en los elementos que la constituyen y se realiza la integración de cada uno de ellos:
( ) drdr
Vbk
rV
rV
ar
Vsen
rV
kVrcrNFR
r
iiiiiiX ψ
ωωωθ
ωωθωρ
ππ
∫ ∫ ⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛+−+⎟
⎠
⎞⎜⎝
⎛ −+= cos221
22
22
222222
0
ωωω
ωω
ωω
ωθρ
ωθωρ
12
cos2
21
322233
22⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVCiV
rVrsenV
rVrV
rVsenrck
drr
VsenkrcF
ii
ii
ii
i
iXa
ωωω
ωω
ωρ
ωωωρ
4
cos
21
222
22⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVSiV
rVrV
rVsenrckV
drr
VsenVkrcF
ii
ii
ii
iiXb
ωωω
ωθρ
ωθρ
221 2
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVCiV
rVrsenckV
drr
VsenkcVF
ii
ii
iiXc
ωω
ρ
ωωρ
221
3
2⎟⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛−=
rVSickV
drr
Vsen
rV
kcVF
ii
iiiXd
Las cuatro expresiones previas corresponden a la primera parte de la integral, cuyo factor
común es el ⎟⎠⎞
⎜⎝⎛
rVsen i
ω .
57

Apéndice B Integración de la ecuación de la fuerza horizontal
Para la siguiente parte de la integral, se realiza el mismo procedimiento; salvo que ahora
el factor común es el ⎟⎠⎞
⎜⎝⎛
rVi
ωcos| .
ωω
ωω
ωω
ωθρ
ωθωρ
12
cos2cos
21
32223322
2222⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVSiVrV
rVsenrV
rVrcak
drr
VkarcF
iii
ii
i
iXe
ωωω
ωω
ωθρ
ωθ
ωωρ
2
coscos2
21
2222
222⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛−=
rVCiV
rVrsenV
rVrcakV
drr
Vakr
VrcF
ii
ii
ii
iiXf
ωωω
ωρ
ωωωρ
2
coscos
21
22
222
222
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVSiV
rVrcakV
drr
Vkr
VarcF
ii
ii
iiXg
ωωω
ωω
ωω
ωρ
ωωρ
12
coscos2cos
21
322233
22⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVSiV
rVrV
rVsenrV
rVrcb
drr
VbrcF
ii
ii
ii
i
iXh
ωωω
ωθρ
ωθρ
2
coscos
21
222
222⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVSiV
rVrackV
drr
VkacVF
ii
ii
iiXi
ωω
θρ
ωθ
ωρ
⎟⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛−=
rVacCikV
drr
Vak
rV
cVF
ii
iiiXj
23
22 cos221
58

Apéndice B Integración de la ecuación de la fuerza horizontal
ωω
ρ
ωωρ
2cos
21
23
222
22
⎟⎠⎞
⎜⎝⎛
−=⎟⎠⎞
⎜⎝⎛=
rVacsenkV
drr
Vk
rV
acVF
ii
iiiXk
ωωω
ωρ
ωρ
2
coscos
21
2
2⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛
=⎟⎠⎞
⎜⎝⎛=
rVSiV
rVrcbV
drr
VbcVF
ii
ii
iiXl
Ya que se han integrado cada uno de los elementos se realiza la suma de todos estos y se obtiene la solución para la fuerza horizontal:
Nr
VasenkV
rVbSiV
rVrbV
rVbsenrV
rVbr
rVaSikV
rVarkV
rVaCikV
rVasenrkV
rVakrV
rVaSikV
rVarkV
rVasenkrV
rVakr
rVCikV
rVsenrkV
rVkSiV
rVrkV
rVksenrV
rVCikV
rVsenrkV
rVkrV
rVsenkrcF
ii
ii
ii
ii
iii
ii
ii
ii
ii
ii
ii
ii
i
ii
ii
ii
ii
ii
ii
ii
ii
iX
⎟⎟⎠
⎞⎟⎟⎠
⎞⎟⎠⎞
⎜⎝⎛−
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−
⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−
⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛−⎜⎜
⎝
⎛⎟⎠⎞
⎜⎝⎛+⎟
⎠⎞
⎜⎝⎛=
ω
ωωω
ωω
ωω
ω
ωω
ωθ
ωθω
ωθω
ωθ
ωθω
ωθω
ωθω
ωθ
ωθω
ωωω
ωω
ωθ
ωθω
ωθω
ωθωρ
ω
23
32223323
222322222
22322222222233
323222
322233
6
5cos5cos26
cos666cos6
5cos5cos2
69cos33
cos221
59

Apéndice C Características del helicóptero
APÉNDICE C CARACTERÍSTICAS DEL HELICÓPTERO
60
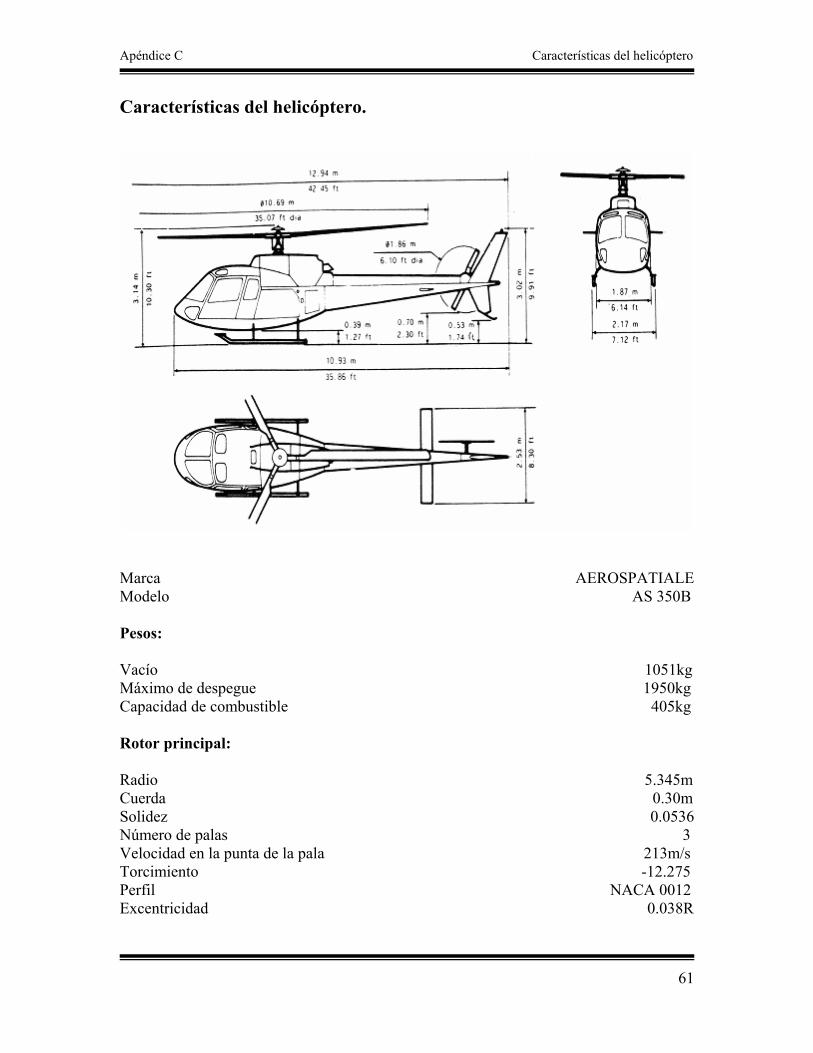
Apéndice C Características del helicóptero
Características del helicóptero.
Marca AEROSPATIALE Modelo AS 350B Pesos: Vacío 1051kg Máximo de despegue 1950kg Capacidad de combustible 405kg Rotor principal: Radio 5.345m Cuerda 0.30m Solidez 0.0536 Número de palas 3 Velocidad en la punta de la pala 213m/s Torcimiento -12.275 Perfil NACA 0012 Excentricidad 0.038R
61
Apéndice D El perfil NACA0012
APÉNDICE D EL PERFIL NACA 0012
62

Apéndice D El perfil NACA0012
El perfil NACA0012 La sección transversal de las palas del helicóptero AEROSPATIALE As 350B cuenta con un perfil NACA0012, este es el mismo a lo largo de toda la pala. El perfil NACA 0012 es un perfil simétrico, comúnmente utilizado en rotores de levantamiento, figura D1. Las curvas características de este perfil se muestran en las figuras D2 y D3.
Figura D1 Perfil NACA 0012
Curva polar de un perfil La curva polar representa la relación que existe entre el coeficiente de sustentación CL y el coeficiente de arrastre CD respecto al ángulo de ataque del perfil. Se conoce como curva polar porque su extremidad inferior es un polo. En la Fig D2 se muestra la curva polar para el perfil NACA0012, que es el perfil de las palas del rotor del helicóptero que se utiliza como ejemplo. Esta curva va a variar respecto al número de Reynolds, debido a que el valor de los coeficientes del perfil dentro de un fluido a diferentes velocidades varía.
Curva Polar
0
0.005
0.01
0.015
0.02
0.025
0.03
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
CL
CD
Figura D2 Curva Polar del perfil
63

Apéndice D El perfil NACA0012
La expresión que describe la curva polar es:
baCC LD += 2
Para el caso del perfil NACA0012:
0057.00099.0 2 += LD CC
El número de Reynolds para esta curva es:
( )6507.4231788
551.1
3.0213Re 2 E
smE
msm
Vl≈=
−==
υ
Donde V es la velocidad del fluido en la cual se encuentra inmerso, igual a Rω para el caso del rotor. l, es la cuerda del perfil y υ la viscosidad cinemática.
Curva de sustentación del perfil Esta curva representa la variación del coeficiente de sustentación respecto al ángulo de ataque del perfil, α .Fig D3:
0102030405060708090
1ertrim.
2dotrim.
3ertrim.
4totrim.
EsteOesteNorte
Curva de sustentación
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-20 -10 0 10 20 3
α
C
0
Fig D3 Curva de sustentación del perfil
64

Apéndice D El perfil NACA0012
De esta gráfica se toman los valores de coeficiente de sustentación CL y se sustituyen en la expresión para la curva polar del perfil, obteniendo con esto el valor del coeficiente de arrastre CD, también de esta se determina la pendiente k, utilizada en los cálculos de velocidad inducida, fuerza de sustentación y potencia inducida.
65

Apéndice E Banco de pruebas
APÉNDICE E BANCO DE PRUEBAS
66

Apéndice E Banco de pruebas
Banco de Pruebas Esta instalación fue creada con el propósito de tener un banco de pruebas para ensaye de alas rotativas, llámense hélices o rotores de sustentación. En dicho banco se pueden obtener valores de fuerza de sustentación y potencia inducidas. Figura E1
Figura E1 Banco de pruebas
La estructura del banco de pruebas está construida de aluminio, consta de una base para poder situarlo sobre alguna superficie, un cuerpo en el cual se encuentra inmersa la flecha u eje motriz y una caja en la cual se registra la fuerza de sustentación, algunos servo actuadores son utilizados para controlar el mando cíclico , el cual sirve para inclinar el rotor completo y el mando colectivo que sirve para regular el ángulo de ataque, y un conjunto de engranes que sirven como transmisión de la potencia del motor hacía el eje motriz del rotor. Lso mecanismos de control y sujeción del rotor fueron tomados de un helicóptero de radio control RAPTOR® clase 30. El motor es de corriente directa de 1HP de potencia, el cual funciona con dos fuentes de poder de 15Volts cada una, a través de un circuito eléctrico diseñado y
67

Apéndice E Banco de pruebas
controlado por medio de un programa en Mathlab, dicho programa asegura que las revoluciones por minuto del rotor sean constantes a pesar de la variación del ángulo de ataque, esto es lo que sucede realmente en un helicóptero El control del motor, el diseño y construcción del circuito eléctrico además del programa de control, fue tema de Tesis de Maestría del C. José Manuel Molinar Monterrubio titulada “Modelo y control de velocidad para un banco de pruebas para rotores de helicóptero” desarrollada en el CINVESTAV en el área mecatrónica. Gracias a esto la puesta en marcha, el monitoreo y la adquisición de datos se hacen vía PC. Figura E2
Figura D2 Banco de pruebas, fuente de poder y circuito de control.
El banco de pruebas formó parte del proyecto de investigación CGPI 2003407,
titulado “Diseño, construcción y experimentación de un rotor de levantamiento para un vehículo aéreo autopilotado de ala rotativa para monitoreo, vigilancia y protección civil”. La patente del banco de pruebas está en trámite. Funcionamiento del banco de pruebas.
Al entrar en operación, el rotor genera una fuerza sustentación y la base está sujeta, dentro de la caja interna en el cuerpo del banco hay 3 postes que sirven como probetas de extensión, la fuerza de sustentación generada por el rotor tiende a jalarlos en uno de sus extremos y como en el otro están fijos, los postes se elongan y es posible registrar su deformación longitudinal adicionando en cada unos de ellos galgas extesiométricas.
68

Apéndice E Banco de pruebas
Para determinar la magnitud de la fuerza de sustentación, se utiliza la Ley de
Hook, ya que se tiene conocimiento de la longitud final LF, una inicial LI de las probetas y se conoce la constante de deformación K del material. Las probetas se maquinaron respecto a las exigencias geométricas necesarias para poder adherir las galgas y tener una medición correcta. Para conocer la magnitud de la constante de deformación del material se realizó un ciclo de 30 pruebas destructivas sobre probetas con las mismas dimensiones que las existentes en el banco de pruebas, y se obtuvo su curva de deformación. Estas pruebas se realizaron en el Laboratorio de Ensaye de Materiales de la ESIME Ticomán. Para determinar la potencia se obtiene el par generado por el motor, este tiene la característica de estar basculando, es decir, se mueve en dirección opuesta al movimiento de su flecha transmisora de potencia, el par es registrado en una pequeña placa situada a un costado de este a través de una galga extensiométrica. Ya que se conoce el valor del par se puede obtener la potencia. Con el fin de validar el modelo matemático propuesto se desarrolló el banco de pruebas, sin embargo; estas no pudieron realizarse debido a cuestiones técnicas y económicas pero a pesar de esto, la construcción y puesta en marcha del banco de pruebas es la base para continuar investigando de manera experimental el presente trabajo de investigación y enriquecerlo.
69