influences on proxemic behaviors in human-robot...
TRANSCRIPT

Influences on Proxemic Behaviors in Human-Robot Interaction
Leila Takayama and Caroline Pantofaru
Abstract— As robots enter the everyday physical world ofpeople, it is important that they abide by society’s unspokensocial rules such as respecting people’s personal spaces. Inthis paper, we explore issues related to human personal spacearound robots, beginning with a review of the existing literaturein human-robot interaction regarding the dimensions of people,robots, and contexts that influence human-robot interactions.We then present several research hypotheses which we testedin a controlled experiment (N=30). Using a 2 (robotics experi-ence vs. none: between-participants) x 2 (robot head orientedtoward a participant’s face vs. legs: within-participants) mixeddesign experiment, we explored the factors that influenceproxemic behavior around robots in several situations: (1)people approaching a robot, (2) people being approached by anautonomously moving robot, and (3) people being approachedby a teleoperated robot. We found that personal experiencewith pets and robots decreases a person’s personal spacearound robots. In addition, when the robot’s head is orientedtoward the person’s face, it increases the minimum comfortabledistance for women, but decreases the minimum comfortabledistance for men. We also found that the personality trait ofagreeableness decreases personal spaces when people approachrobots, while the personality trait of neuroticism and havingnegative attitudes toward robots increase personal spaces whenrobots approach people. These results have implications forboth human-robot interaction theory and design.
I. INTRODUCTION
Simple robots such as robotic vacuum cleaners are becom-ing increasingly prevalent in everyday human environments,and it is only a matter of time until larger and more complexrobots join them. As in human-to-human interactions, acontributing factor to human acceptance of such machinesmay be how well the robots obey comfortable human-robotspatial relationships. There is a wealth of information fromboth natural field observations and controlled laboratoryexperiments regarding the personal spaces of interactingpeople (e.g., [2][8]), but it is unclear exactly how this willinform human-robot personal spaces.
The media equation theory states that people interactwith computers as they interact with people [14][16]. Thismay become increasingly true for human-robot interaction,where the computers that take action in the physical humanenvironment. However, people do not always orient towardrobots as they orient toward people. At times, people engagewith robots in the way that they engage with tools [20],particularly when they are roboticists whose job it is to buildand maintain the robot. Thus, it is necessary to gain a betterunderstanding of which robot design decisions influence
L. Takayama and C. Pantofaru are Research Scientists at Wil-low Garage Inc., 68 Willow Road, Menlo Park, CA 94025, USAtakayama,[email protected]
human proxemic behaviors around robots, and how humanfactors such as experience with robots can affect them.
By gaining a deeper understanding of the factors thatmost influence human-robot proxemic zones, one may gaina better sense of how to design better models of human-robot interaction, optimizing algorithms for how close robotsshould approach people. Indeed, using proxemic distances toalter interactive system behavior has already been effectivein human-computer interactions with systems such as digitalwhite boards [12]. Similar research is currently being doneon how end-users might teach robots to engage in acceptableproxemic behaviors [13].
The goals of this study are to more thoroughly explorethe human and robot factors that influence optimal proxemicbehaviors in human-robot interaction and to turn those find-ings into implications for human-robot interaction design. Assuch, we first present a review of existing literature on issuesof human proxemics, human dimensions of HRI proxemics,robot dimensions of HRI proxemics, and pose hypotheses tobe tested by this study.
Our theoretical stance is that people will engage in prox-emic behavior with robots in much the same way that theyinteract with other people, thereby extending the Computersas Social Actors theory [14][16] to human-robot interaction.Based on the existing empirical literature in human prox-emics and HRI, we present more specific research hypothe-ses and test them with a controlled experiment, focusingon personal experience with pets and robots, personalitycharacteristics, and the robot’s head direction (facing theperson’s face vs. facing the person’s legs), as they influencethe personal spaces between people and robots.
II. RELATED LITERATURE
A. Human Proxemics
Fifty years ago, Edward T. Hall [8] introduced the conceptof proxemics, which refers to the personal space that peoplemaintain around themselves. Much of the research on thistopic is summarized by Michael Argyle [2], who introducedan intimacy equilibrium model [1], which reasons about theinteractions between mutual gaze and proxemic behavior. Ifa person feels that someone else is standing too close forcomfort, that person will share less mutual gaze and/or leanaway from the other person. As noted by Argyle [2], there aremany factors that influence proxemic behaviors, includingindividual personalities, familiarity between people, to whatdegree people are interacting, the social norms of theirculture, etc.
The unspoken rules of personal space tend to hold truewith nonhuman agents. In virtual reality settings, people
The 2009 IEEE/RSJ International Conference onIntelligent Robots and SystemsOctober 11-15, 2009 St. Louis, USA
978-1-4244-3804-4/09/$25.00 ©2009 IEEE 5495

adjust their proxemic behaviors to virtual people (e.g., avatarsand virtual agents) as they do with regular people in thephysical world [3]. This is consistent with the media equa-tion theory [14][16]. Given that people will interact withcomputers, on-screen characters, and virtual reality agents,it is not unreasonable to posit that such proxemic behaviorsmight also hold true in human-robot interaction. We explorethe related works in human-robot personal spaces in thefollowing sections.
B. Human Dimensions of HRI ProxemicsAmong the many human factors that influence proxemics
in HRI are a person’s age, personality, familiarity withrobots, and gender.
A person’s age influences how close a person will stand toa robot. In controlled experiments with children and adultsinteracting with the mechanistic robot PeopleBot, childrentended to stand further away from the robot than adults [22].
Peoples’ personalities also seem to influence the distancesthey maintain to robots. In a laboratory experiment withrobots approaching seated people, it was found that peoplewho are highly extroverted are tolerant of personal spaceinvasion, regardless of whether the robot approaches from thefront or rear; however, people who are low on extraversionare more sensitive to robot approach directions [17]. Thisis consistent with previous research in human interpersonaldistance that found extroverts are tolerant of closer proxemicbehaviors than introverts [25]. In somewhat of a contrast,another study of standing people found that those whoare more proactive (i.e., more aggressive, creative, active,excitement-seeking, dominant, impulsive, and less shy) tendto stand further away from robots [21]. Though the twostudies do not tap the exact same personality construct, theypose an interesting conflict in the existing literature regardingpersonality and human-robot spatial relationships.
Consistent with the social science findings that peoplestand closer to other people with whom they are morefamiliar [8], people who have prior experience with a robotalso tend to approach closer to it in subsequent interactions[23]. Therefore, the current study takes into account people’sprevious experience with the robot.
Another influence upon proxemic behavior with robots isgender. Consistent with findings that women prefer to beapproached from the front than from the side and that menprefer to be approached from the side than from the front[7], an experiment on robots approaching people found thatmen allow robots to approach much closer from the side thanfrom the front [18]. Gender also influences sensitivity to non-human agents such as agents and avatars in immersive virtualreality settings; in a study on proxemics in virtual reality,women were less comfortable moving close to virtual agents(supposedly controlled by software) than avatars (supposedlycontrolled by a person), whereas men did not differentiatebetween the two types of controllers [3].
C. Robot Dimensions of HRI ProxemicsAmong the many robot factors that influence proxemics
in HRI are a robot’s voice, form, speed, and height.
In controlled experiments that manipulated robot voices,adults tended to have longer approach distances from robotswith synthesized voices as opposed to approach distancesfrom robots with high quality male as opposed to high qualityfemale voices or no voices at all [24].
In similar experiments that manipulated robot form(mechanoid vs. humanoid PeopleBots), adults tended to havelonger approach distances from humanoid robots than frommechanoid ones [19]. Similar results were found on theNomadic Scout II [5].
People have been shown to also be sensitive to mobilerobot speeds, preferring that a robot move at speeds slowerthan that of a walking human [5]; studies have found thathaving a mobile personal robot moving at approximately 1meter per second is too fast for human comfort.
Robot height is yet another contributing factor. The studyin [23] argued that actual robot height does not systematicallyinfluence comfortable approach distances across the partici-pants, although robot appearance does. Height was a factorin overall perceptions, however, with the taller PeopleBotperceived as being more capable, authoritative and human-like than the shorter version.
D. Contextual Dimensions of HRI Proxemics
Depending upon the type of human-robot interaction activ-ity, proxemic behaviors may vary widely. In a more dynamicinteraction of people teaching robots to identify objects,adults were generally found to prefer to maintain a personaldistance (i.e., 0.46 to 1.22 meters) from the robot, but thisvaried by the type of task (i.e., following, showing, andvalidating missions) [10].
E. Research Hypotheses
Based on the existing literature in human-robot interactionand proxemics, we pose four research hypotheses to beexplored in this study.
1) Because experience with non-human agents mightaffect interactions with robots, we hypothesize thatexperience with owning pets will decrease the personalspace that people maintain around robots.
2) Because familiarity between people decreases personalspaces between people [2] and this seems to hold truein human-robot interaction [23], we hypothesize thatexperience in robotics will decrease the personal spacethat people maintain around robots.
3) Because people have more control over their per-sonal space when they are the ones approaching (asopposed to being approached), we hypothesize thatpeople will maintain larger personal spaces when beingapproached by a robot than when they are approachingthe robot.
4) Because mutual gaze increases personal spaces be-tween people [1], we hypothesize that when the robot’shead is oriented toward the individual’s face, the indi-vidual will require a larger separation than when therobot’s head faces the person’s legs.
5496
Each of these hypotheses hinges on the notion that robotsmight be treated as social actors in much the same way thatcomputers are treated as social actors [14][16].
III. STUDY DESIGN
In order to test these research hypotheses, we conducteda 2 (robotics experience vs. none: between-participants) x2 (robot head turned to participant’s face vs. legs: within-participants) mixed design experiment. We aimed to studythe factors that influence proxemic behavior around robots inseveral situations: (1) people approaching a robot, (2) peoplebeing approached by an autonomously moving robot, and (3)people being approached by a teleoperated robot.
A. Participants
Participants were recruited via mailing lists and onlineclassifieds from the geographically local community in theSan Francisco Bay Area of California; these results maynot apply to other geographical areas. They included 30individuals (14 women and 16 men), whose ages rangedfrom 19 to 55 years of age (M=28.9, Standard Error=1.5).Participants had to be at least 18 years of age and fluent inEnglish. Ethnicities were not recorded. There was a roughlyequal split between the genders of people with or withoutrobotics experience. Among the women, six had at least oneyear of experience with robotics and eight did not. Amongthe men, eight had at least one year of experience withrobotics and eight did not. Among the people with previousexposure to robots, 3 had never owned a pet while 12 had.Among those without previous exposure to robots, 2 hadnever owned a pet while 15 had. Their heights ranged from1.55 to 1.88 meters (M=1.71, Standard Error=0.02).
B. Materials
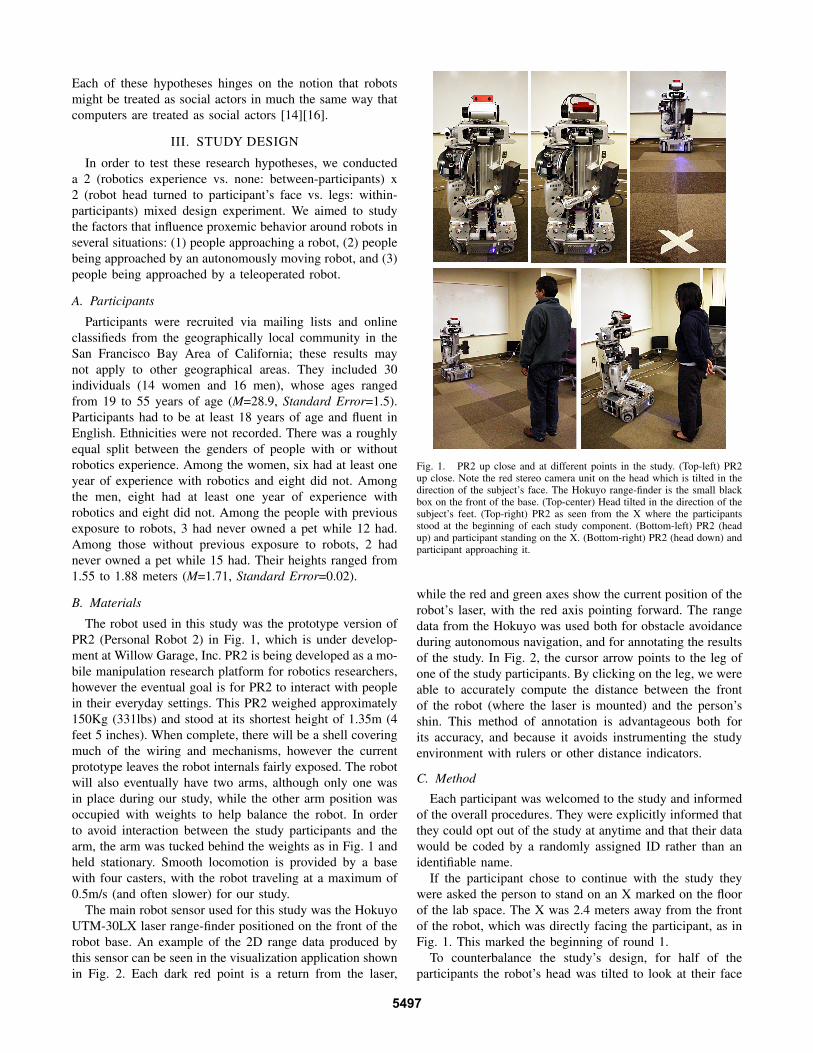
The robot used in this study was the prototype version ofPR2 (Personal Robot 2) in Fig. 1, which is under develop-ment at Willow Garage, Inc. PR2 is being developed as a mo-bile manipulation research platform for robotics researchers,however the eventual goal is for PR2 to interact with peoplein their everyday settings. This PR2 weighed approximately150Kg (331lbs) and stood at its shortest height of 1.35m (4feet 5 inches). When complete, there will be a shell coveringmuch of the wiring and mechanisms, however the currentprototype leaves the robot internals fairly exposed. The robotwill also eventually have two arms, although only one wasin place during our study, while the other arm position wasoccupied with weights to help balance the robot. In orderto avoid interaction between the study participants and thearm, the arm was tucked behind the weights as in Fig. 1 andheld stationary. Smooth locomotion is provided by a basewith four casters, with the robot traveling at a maximum of0.5m/s (and often slower) for our study.
The main robot sensor used for this study was the HokuyoUTM-30LX laser range-finder positioned on the front of therobot base. An example of the 2D range data produced bythis sensor can be seen in the visualization application shownin Fig. 2. Each dark red point is a return from the laser,
Fig. 1. PR2 up close and at different points in the study. (Top-left) PR2up close. Note the red stereo camera unit on the head which is tilted in thedirection of the subject’s face. The Hokuyo range-finder is the small blackbox on the front of the base. (Top-center) Head tilted in the direction of thesubject’s feet. (Top-right) PR2 as seen from the X where the participantsstood at the beginning of each study component. (Bottom-left) PR2 (headup) and participant standing on the X. (Bottom-right) PR2 (head down) andparticipant approaching it.
while the red and green axes show the current position of therobot’s laser, with the red axis pointing forward. The rangedata from the Hokuyo was used both for obstacle avoidanceduring autonomous navigation, and for annotating the resultsof the study. In Fig. 2, the cursor arrow points to the leg ofone of the study participants. By clicking on the leg, we wereable to accurately compute the distance between the frontof the robot (where the laser is mounted) and the person’sshin. This method of annotation is advantageous both forits accuracy, and because it avoids instrumenting the studyenvironment with rulers or other distance indicators.
C. Method
Each participant was welcomed to the study and informedof the overall procedures. They were explicitly informed thatthey could opt out of the study at anytime and that their datawould be coded by a randomly assigned ID rather than anidentifiable name.
If the participant chose to continue with the study theywere asked the person to stand on an X marked on the floorof the lab space. The X was 2.4 meters away from the frontof the robot, which was directly facing the participant, as inFig. 1. This marked the beginning of round 1.
To counterbalance the study’s design, for half of theparticipants the robot’s head was tilted to look at their face
5497

Fig. 2. Visualization of the point cloud from the 2D laser range-finderon the robot’s base. The red dots represent laser returns, the green and redaxes represent the laser range-finder (with red pointing forwards), and thecursor points to a subject’s leg.
in round 1 and their legs in round 2; while the order wasswitched for the other half of the participants.
When ready, the participant was told, “The robot is goingto identify you by your [face or legs]. Please move towardthe robot as far as you feel comfortable to do so.” Uponcompletion of this step, the participant was asked to repeatthe action for the sake of reliability. Next the participantwas told, “Now the robot will approach you. When therobot has come too close for comfort, please step to theside.” Upon completion of this step, the participant was againasked to repeat the action for the sake of reliability. Therobot approached the participant autonomously twice and asoperated by another experimenter twice (teleoperated). Theparticipant was told whether the robot was autonomous orbeing teleoperated. Once done with the behavioral part ofthe round, the participant filled out the brief questionnaireabout perceived safety in the situation.
Next, the participant repeated these actions in the secondround with the opposite robot head orientation from the firstround: walking toward the robot twice, being approached bythe autonomous robot twice, and being approached by theteleoperated robot twice.
Upon completion of both rounds, the participant was askedto complete the rest of the paper survey, which asked themquestions about their personality and demographics. Theexperimenter clarified questionnaire items if the participanthad trouble with the item. Once the participant completedboth rounds and the final questionnaire, they were debriefedabout the purposes of the study and discussed the study withthe experimenters.
D. Measures
The behavioral measures in this study were the averageand minimum distance that the participant reached relativeto the robot’s base scanner. This measurement was taken sixtimes per round for each of the two rounds. The attitudinal
measures in this study were the perceived safety measuresadministered at the end of each round. The personality traits(extraversion, agreeableness, conscientiousness, neuroticism,and openness), [11], need for cognition (i.e., how much onelikes to think) [6], negative attitudes toward robots [15],and demographic measures were administered in the finalquestionnaire for the study.
E. Data Analysis
Before starting the data analysis, indices were calculatedfor each of the standardized questionnaires and recorded basescanner readings were watched and coded by two experi-menters. The raters were blind to the experiment conditionsand identified the minimum distances between the person andthe robot by clicking on the person’s leg scans as in Fig. 2.Interrater reliability for the distance readings was high, r=.93,p<.001. For each data point, we used the average of the tworaters’ distance selections.
In the first set of analyses, we tested the research hypothe-ses. We explored the main effects of personal experiencewith pets and robots upon proxemic behaviors around robots,using analysis of variance (ANOVA). We also investigatedthe effects of robot head orientation (facing the person’s facevs. legs) upon proxemic behaviors, using a repeated measuresANOVA.
In the second set of analyses, we ran exploratory regres-sion models to identify which factors would best predictvariance in proxemic behaviors and perceived safety; we usedforward stepwise regression because it is typically used forsuch exploratory analyses [9].
IV. RESULTS AND DISCUSSION
A. Effects of Personal Experience Upon Proxemic BehaviorsWith Robots
In support of Hypotheses 1 and 2, we found that personalexperiences with pets and experience in robotics influenceproxemic behaviors among the participants in this study.
In a univariate ANOVA, we found that people who hadowned pets in the past were comfortable with the robotbeing closer (M=0.39 meters on average, Standard Error(SE)=0.02) than people who had never owned pets in thepast (M=0.52, SE=0.07), F(1,28)=7.15, p<.05, (where thereis 1 degree of freedom (df) in the numerator of the F -valueand there are 28 degrees of freedom in the denominator).The mean and standard error values are depicted in Fig. 3.
Next, we examined the combined effects of who wasapproaching whom (person approaching robot vs. teleoper-ated robot approaching person), pet ownership experience,and experience with robots. In a repeated measures analysisof covariance (ANCOVA) with pet ownership experience(between-participants), experience with robots (between-participants), and person vs. teleoperated robot approaches(within-participants) predicting minimum distance betweenperson and robot, we found that people who had at leastone year of experience with robots were comfortable withbeing closer to the robot (M=0.25 meter minimum distance,SE=0.03, with pet ownership as a covariate) than people who
5498

TABLE IREPEATED MEASURES ANALYSIS OF COVARIANCE: EFFECTS OF PET
OWNERSHIP, EXPERIENCE WITH ROBOTS, AND ROBOT VS. PERSON
APPROACH UPON MINIMUM DISTANCE BETWEEN PERSON AND ROBOT
Sources of Variance Sum of df* Mean Ffor Minimum Proxemic Distance Squares Square
with
in
Robot vs. person approaches 0.002 1 0.002 0.30Robot vs. person approachesx Pet ownership 0.000 1 0.000 0.00Robot vs. person approachesx Robot experience 0.001 1 0.001 0.13Error 0.202 27 0.007
betw
een Pet ownership 0.035 1 0.035 1.72
Robot experience 0.119 1 0.119 5.60**Error 0.621 27 0.022
* df = Degrees of Freedom** p<.05
had less than one year of experience with robots (M=0.34,SE=0.03, with pet ownership as a covariate), F(1,27)=4.24,p<.05. The other main effects and interaction effects werenot found to be significant. Thus, Hypothesis 2 was supportedby this analysis, but Hypothesis 3 was not. The results of thissecond analysis are shown in Table I and Fig. 3.
Together, these findings provide support for Hypotheses 1and 2, which stated that experience with pets and robotsdecrease personal spaces with the robot. However, thesefindings do not provide support for Hypothesis 3, whichstated that people would allow for smaller personal distanceswhen they were approaching the robot as opposed to whenthe robot was approaching them.
B. Effects of Robot Head Direction Upon Proxemic Behav-iors With Robots
To examine Hypothesis 4, we ran a repeated measuresANOVA to evaluate the effects of robot head direction(facing the person’s face vs. legs) upon minimum distancesto the robot. Using pet ownership experience and genderas independent variables in this repeated measures ANOVA,including all main and two-way interactions, we found thatpet ownership experience was a nearly significant predic-tor of proxemic behaviors, F(1,28)=4.16, p=.05, and thatthe interaction between robot head direction and genderof participant was also a significant predictor of proxemicbehaviors, F(1,27)=4.54, p<.05. While both women and mengenerally approached the robot at the same distance whenthe robot’s head was facing downward at their legs, womenmaintained a larger distance from the robot than men whenthe robot’s head was oriented upward toward the participant’sface. The mean and standard error values are depicted inFig. 4, and full analysis results are presented in Table II.
Although this analysis did not find support for the maineffect of robot head direction (Hypothesis 4), it did identifya significant interaction between gender and robot headdirection such that when the robot’s head is facing theperson’s face (as opposed to facing the person’s legs), mentend to get closer to the robot than women.
Pet Ownership
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Yes No
Pet Ownership
Ave
rage
Per
sona
l Spa
ce
(m)
Experience with Robots
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Yes No>1 Year of Robotics Experience
Min
imum
Per
sona
l Spa
ce
(m)
Fig. 3. Personal experience influences on proxemic behaviors with robots.The left-hand chart shows that participants who had owned a pet at somepoint in their lives were comfortable at closer average distances to the robotthan those who had never owned a pet. The right-hand chart shows thatrobotics experience also correlates with smaller comfortable distances.
C. Exploratory Analysis of Effects Upon Proxemic BehaviorsWith Robots in Varying Situations
Because there are so many factors that seem to influ-ence proxemic behavior between people and robots (e.g.,[10][17][23]), we decided to use exploratory regressionanalyses to identify which factors were more predictive ofproxemic behaviors in this study. Because it is fundamentallydifferent to approach a robot vs. be approached by a movingrobot, we chose to analyze each of the three situationsseparately: (1) people approaching a robot, (2) people beingapproached by an autonomously moving robot, and (3)people being approached by a teleoperated robot. Theseanalyses differed from the first set of analyses in that theydid not look at effects upon general proxemic behavior, butrather looked at personality and personal experiences as theyaffect specific types of proxemic behaviors. The final analysisin this set examined what predictors best accounted for one’ssense of safety in these human-robot situations.
In the first analysis of people approaching the robot, weused a forward stepwise linear regression model to see whichof the following predictors would best account for minimumdistance to the robot when the person approached the robot:pet ownership experience, at least one year of experiencewith robots, gender of participant, height of the robot,extraversion, agreeableness, conscientiousness, neuroticism,openness, need for cognition, and negative attitudes towardrobots. From this analysis, we learned that the “big five”personality trait of agreeableness was the best predictorof the factors included in the model for predicting mini-mum distance to the robot when the person approached therobot (standardized β=-.45, t=-2.68, p<.05), Model R2=.21,F(1,28)=7.20, p<.05. People who were more agreeable (asdefined by the big five personality index) felt comfortablewith being closer to the robot than people who were lessagreeable.
In the second analysis of the teleoperated robot approach-ing the person, we used the same forward stepwise linear re-gression model to see which of those same predictors wouldbest account for minimum distance to the robot when the
5499

TABLE IIREPEATED MEASURES ANALYSIS OF COVARIANCE: EFFECTS OF PET
OWNERSHIP, PARTICIPANT GENDER, AND ROBOT HEAD DIRECTION
UPON MINIMUM DISTANCE BETWEEN PERSON AND ROBOT
Sources of Variance Sum of df* Mean Ffor Minimum Proxemic Distance Squares Square
with
in
Robot head direction 0.009 1 0.009 2.51Robot head directionx Pet ownership 0.012 1 0.012 3.16Robot head directionx Gender 0.016 1 0.016 4.45**Error 0.098 27 0.004
betw
een Pet ownership 0.100 1 0.100 4.16
Gender 0.006 1 0.006 0.62Error 0.647 27 0.024
* df = Degrees of Freedom** p<.05
teleoperated robot approached the person. From this analysis,we learned that negative attitudes toward robots (standardizedβ =.42, t=2.58, p<.05) and the big five personality traitof neuroticism (standardized β=.33, t=2.06, p<.05) werethe best predictors of minimum distance to the approachingteleoperated robot, Model R2=.30, F(2,27)=4.25, p<.05.People who held more negative attitudes toward robots andwere more neurotic (as defined by the big five personalityindex) maintained larger distances between themselves andthe teleoperated robot than people who rated low on thosemeasures.
The third analysis, looking at the autonomous robotapproaching the person, had to be conducted differently.For safety reasons, if the subject did not move, the robotalways stopped at a minimum of between 30-60cm from thesubject’s legs. Only 27 out of 120 instances of autonomousrobot approaches actually resulted in people moving awayfrom the robot. Therefore, we recoded the dependent variableas a binary value for whether or not the person ever steppedaway from the robot, resulting in 12 out of 30 peopleactually moving away from the robot. Thus, we ran aforward stepwise binary logistic regression to see which ofthose same predictors would best account for whether ornot the person stepped away from the autonomous robot.From this analysis, we learned that negative attitudes towardrobots (β=.19, p<.05) and the big five personality trait ofneuroticism (β=.11, p=.07) also best predicted the variancein the minimum distance to the robot when the autonomousrobot approached the person, R2=.40 (where R2 measuresthe amount of variance in the minimum distance to robotthat was accounted for by the model, ranging from 0 to 1).People who held more negative attitudes toward robots andwere more neurotic (as defined by the big five personalityindex) maintained larger distances between themselves andthe autonomous robot than people who rated low on thosemeasures.
In the fourth analysis of this study, we explored thefactors that most influence a person’s perceived safety [4]in these interactions. We used the same forward stepwise
Effects of Robot Head Direction on Personal Space
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Face Legs
Robot Head Direction
Min
imum
Per
sona
l Spa
ce (m
) FemaleMale
Fig. 4. Mean and standard error values for minimum personal spacedistances as affected by participant gender and robot head orientation,controlling for pet ownership experience=0.8
linear regression model as the first two analyses to seewhich of those same predictors would best account fora person’s overall perceived safety throughout the entirestudy. From this analysis, we learned that negative attitudestoward robots (standardized β =-.39, t=-2.42, p<.05) wasthe best predictor of the factors included in the modelfor predicting perceived safety when interacting with therobot, Model R2=.15, F(1,28)=5.03, p<.05. People who heldmore negative attitudes toward robots felt less safe wheninteracting with the robot.
V. CONCLUSIONS AND IMPLICATIONS
A. Conclusions
In this controlled experiment, we found support for threeout of four of our research hypotheses. Our data support thehypotheses that (H1) experience with owning pets decreasesthe personal space that people maintain around robots, (H2)experience with robots decreases the personal space thatpeople maintain around robots, and (H4) a robot “looking” atpeople in the face (versus at their legs) influences proxemicbehaviors. We were somewhat surprised to find that womenmaintain larger personal spaces from robots that are “look-ing” at their faces than men. We did not find support for ourhypothesis that people will approach robots closer than theywill let robots approach them (H3).
Through our exploratory analyses, we learned how atti-tudes, personal experiences, and personality factors influenceproxemic behavior. We learned that people who are moreagreeable (personality trait) move closer toward robots. Wealso learned that people who hold negative attitudes towardrobots and/or are more neurotic (personality trait) standfurther away from approaching robots. Finally, we learnedthat people who hold negative attitudes toward robots feelless comfortable in these human-robot situations. These find-ings regarding personality types contrast existing researchthat showed how proactiveness [21] and extraversion [17]were the most important influences upon proxemic behaviorbetween people and robots. Further research is necessary toexamine these differences.
5500

B. Implications for Theory
The findings of this study mostly support the theory thatpeople will use similar proxemic rules when interacting withrobots as they do when interacting with other people inthat robot head orientation, human gender, and familiaritywith others (in this case, robots) influence personal spaces.Just as experience with people influences how close onewould stand to one another [2], experience with robots alsoinfluences how close one would stand to this robot. Just aspeople maintain more distance from each other when sharinga mutual gaze [1], women in this study also stood furtheraway from the robot when its head was facing their faces.Just as personalities influence proxemic behaviors betweenpeople [2], we found that personalities also influence prox-emic behaviors between people and robots. Not all parts ofhuman-human interaction directly translate into human-robotinteraction, but we have identified several relationships thatdo hold true in these human-robot interaction situations.
C. Implications for Design
Based upon the results of this study, we offer severalproposals for how to better design proxemic behavior intorobots that interact with people. The PR2 used in this studyis a prototype of a robot that will eventually be used forinteracting with people in their everyday environments; assuch, it is important to understand how to build robots thatwill follow the norms of proxemic behaviors to maintaincomfort and trust levels between people and these personalrobots.
The first design guideline is to use recognition of familiarpeople (e.g., people the robot has identified several timesin the past) in deciding how close to approach people. Ifthe person has been seen frequently over the past year,then it is reasonable to approach that person closer thanone would approach a person who is not identified asbeing familiar. Robots that function in environments withpeople accustomed to their presence can be programmed toapproach people more closely whereas robots that function inenvironments with strangers can be programmed to maintainlarger proxemic distances.
The second design guideline is to include the robot’s gazebehavior in deciding how close to approach people. If therobot needs to move in closer to a person, particularly awoman, the robot should direct its gaze away from theperson’s face. In this case, the robot could turn its headtoward the ground. As robots become increasingly able toidentify individuals and demographic information is increas-ingly available in places like the Internet, these data maybetter inform proper proxemic behaviors.
The third design guideline is to consider pairing personidentification with personal information to better gauge theappropriate approach distances. For example, if a personis known to have negative attitudes toward robots, thenit is better for the robot to maintain more distance fromthat individual. If a person is known to be more neurotic,then the robot should also maintain more distance fromthat individual. However, if the person is known to be
more agreeable, then the robot should be prepared to beapproached more closely by that individual. Similarly, if thepersonal information includes whether or not this person hasever owned pets, the robot could also know to keep moredistance from those individuals who have never owned pets.
The empirical results of this study and these designguidelines are only a start to revealing the type of informationthat robots should take into account when calculating howclose or far away to stand from people in the environment.
D. Limitations
As with any single study, there are several limitations ofthis experiment design that must be acknowledged. First, thisstudy was run with only one version of one robot, PR2. Otherstudies have been run with robots such as the PeopleBot. Itis important to test these hypotheses and theories againsta wide variety of robots in order to assess whether suchempirical findings generalize. Second, this study was runwith only members of the local geographic community,thereby localizing its generalizeability to members of thisculture. Cross-cultural issues are known to strongly affectproxemic behaviors [2][8] so it is especially important totest these hypotheses and theories in other cultural contextswith a wider demographic of people. Third, this study wasonly able to include a few of the many potentially importantvariables at play in the influences of proxemic behaviorsbecause we could not risk participant fatigue for the sakeof exhaustively manipulating and measuring every possiblevariable. Thus, it is important to consider the wider rangeof studies (such as those presented in the Introduction)when making decisions about exactly how to build proxemicbehaviors into robots. Fourth, the task used in this studywas very simple and not as involved as more teamworkoriented tasks between people and robots. Thus, its findingsare limited in scope to simple encounters in which peopleapproach robots and robots approach people. Future workshould address how such proxemic behaviors are influencedby other contexts and activities.
VI. FUTURE WORK
This is one among many possible empirical studies regard-ing proxemic behaviors between people and robots. Thereis clearly much more research to be done in exploring thedimensions of people, robots, and their contexts. Our nextstep is to use these design guidelines and those from relatedwork to inform the proxemic behaviors of PR2 when itencounters people and interacts with them.
VII. ACKNOWLEDGMENTS
The authors gratefully acknowledge the contributions ofEitan Marder-Eppstein and Wim Meeussen for their helpwith the autonomous robot navigation. We also thank SteffiPaepcke for editing this manuscript and thank the manypeople who volunteered to participate in this study.
5501

REFERENCES
[1] M. Argyle and J. Dean, “Eye-contact, Distance and Affiliation,”Sociometry, vol. 28, 1965, pp. 289-304.‘
[2] M. Argyle, Bodily Communication, Methuen, New York NY: 1975.[3] J.N. Bailenson, J. Blascovich, A.C. Beall, and J.M. Loomis, “Interper-
sonal Distance in Immersive Virtual Environments,” Personality andSocial Psychology Bulletin, vol. 29, 2003, pp. 1-15.
[4] C. Bartneck, E. Croft, and D. Kulic, “Measurement Instruments for theAnthropomorphism, Animacy, Likeability, Perceived Intelligence, andPerceived Safety of Robots,” International Journal of Social Robots,vol. 1, 2009, pp. 71-81.
[5] J.T. Butler and A. Agah, “Psychological Effects of Behavior Patternsof a Mobile Personal Robot,” Autonomous Robots, vol. 10, 2001, pp.185-202.
[6] J.T. Cacioppo, R.E. Petty, and C.F. Kao, “The Efficient Assessmentof Need for Cognition,” Journal of Personality Assessment, vol. 48,1984, pp. 306-307.
[7] J.D. Fisher and D. Byrne, “Too Close for Comfort: Sex Differencesin Response to Invasions of Personal Space,” Journal of Personalityand Social Psychology, vol. 32, 1975, pp. 15-21.
[8] E.T. Hall. The Hidden Dimension, Doubleday, New York, NY: 1966.[9] D.C. Howell. Statistical Methods for Psychology, Duxbury: Pacific
Grove, CA: 2002.[10] H. Huettenrauch, K.S. Eklundh, A. Green, and E.A. Topp, “Investigat-
ing Spatial Relationships in Human-Robot Interaction,” in Proceedingsof the International Conference on Intelligent Robots and Systems,2006, pp. 5052-5059.
[11] O.P. John and S. Srivastava, “The Big Five Trait Taxonomy,” inHandbook of Personality: Theory and Research, Guilford Press, NewYork, NY: 1999.
[12] W. Ju, B. Lee, and S. Klemmer, “Range: Exploring Implicit Inter-action through Electronic Whiteboard Design,” in Proceedings of theComputer Supported Collaborative Work Conference (CSCW), 2008,pp. 17-26.
[13] N. Mitsunaga, C. Smith, T. Kanda, H. Ishiguro, and N. Hagita,“Robot Behavior Adaptation for Human-Robot Interaction based onPolicy Gradient Reinforcement Learning,” in Proceedings of the IEEEInternational Conference on Intelligent Robots and Systems (IROS),2005, pp. 319-324.
[14] C. Nass, J. Steuer, and E.R. Tauber, “Computers are Social Actors,”in Proceedings of the Conference on Human Factors in ComputingSystems (CHI), 1994, pp. 72-78.
[15] T. Nomura, T. Kanda, and T. Suzuki, “Experimental Investigationinto Influence of Negative Attitudes Toward Robots on Human-RobotInteraction,” AI and Society, vol. 20, 2006, pp. 138-150.
[16] B. Reeves and C. Nass. The Media Equation: How People TreatComputers, Television, and New Media Like Real People and Places,CSLI Press, Stanford, CA: 1996.
[17] D.S. Syrdal, K. Dautenhahn, S. Woods, M.L. Walters, K.L. Koay,“‘Doing the Right Thing Wrong’–Personality and Tolerance to Un-comfortable Robot Approaches,” in Proceedings of the IEEE Interna-tional Symposium on Robot and Human Interactive Communication(RO-MAN), 2006, pp. 183-188.
[18] D.S. Syrdal, K.L. Koay, M.L. Walters, K. Dautenhahn, “A PersonalityRobot Companion? – The Role of Individual Differences on SpatialPreferences in HRI Scenarios,” in Proceedings of the IEEE Conferenceon Robot and Human Interactive Communication (RO-MAN), 2007,pp. 1143-1148.
[19] D.S. Syrdal, K. Dautenhahn, M.L. Walters, and K.L. Koay, “SharingSpaces with Robots in a Home Scenario – Anthropomorphic Attribu-tions and Their Effects on Proxemic Expectations and Evaluations ina Live HRI Trial,” in Proceedings of the AAAI Fall Symposium, 2008.
[20] L. Takayama, “Making Sense of Agentic Objects and Teleoperation:In-the-moment and Reflective Perspectives,” in Late breaking resultsof Human-Robot Interaction Conference (HRI), 2009.
[21] M.L. Walters, K. Dautenhahn, R. te Boekhorst, K.L. Koay, C. Kaouri,S. Woods, C. Nehaniv, D. Lee, and I. Werry, “The Influence of Sub-jects’ Personality Traits on Personal Spatial Zones in a Human-RobotInteraction Experiment,” in Proceedings of the IEEE InternationalWorkshop on Robot and Human Interactive Communication (RO-MAN), 2005, pp. 347-352.
[22] M.L. Walters, K. Dautenhahn, K.L. Koay, C. Kaouri, R. te Boekhorst,C. Nehaniv, I. Werry, and D. Lee, “Close Encounters: Spatial Dis-tances Between People and a Robot of Mechanistic Appearance,” inProceedings of the IEEE-RAS International Conference on HumanoidRobots, 2005, pp. 450-455.
[23] M.L. Walters, “The Design Space for Robot Appearance and Be-haviour for Social Robot Companions,” University of HertfordshireDissertation, 2008.
[24] M.L. Walters, D.S. Syrdal, K.L. Koay, K. Dautenhahn, and R. teBoekhorst, “Human Approach Distances to a Mechanical-LookingRobot with Difference Robot Voice Styles,” in Proceedings of theIEEE International Symposium on Robot and Human InteractiveCommunication (RO-MAN), 2008, pp. 707-712.
[25] J.L. Williams, “Personal Space and Its Relation to Extraversion-Introversion,” Canadian Journal of Behavioural Science, vol. 3, pp.156-160.
5502