improved dynamic state estimation based protection on vsc
TRANSCRIPT
Improved Dynamic State Estimation Based Protection on VSC-HVDC Transmission Lines with
Full Exploitation of Information Redundancy
Abstract: To ensure quick and reliable primary protection on VSC-HVDC transmission lines, this paper proposes an improved Dynamic State Estimation (DSE) based protection method with full exploitation of information redundancy. The proposed approach improves the existing DSE based protection method by establishing a new dynamic model of the line under protection, which considers information redundancy embedded in the protection problem. The new dynamic model is systematically solved through the DSE procedure with weight matrices that are mathematically derived. Numerical experiments in an example VSC-HVDC system validate that the proposed DSE based protection method has improved selectivity, dependability and security compared to the existing DSE based protection method. In addition, the computation burden of the method is also carefully examined to ensure that it can meet real-time operation requirements of protective relays in practice. Index Terms: VSC-HVDC transmission lines, transmission line protection, dynamic state estimation based protection, information redundancy
I. INTRODUCTION oltage Source Converter based High Voltage Direct Current (VSC-HVDC) systems are with increasing deployment in
modern power systems. The major benefits of VSC-HVDC systems mainly include flexible controllability and no need for the reactive power support comparing to traditional Line Commutated Converter based HVDC (LCC-HVDC) systems [1-3]. However, when faults occur in the VSC-HVDC transmission lines, the fault currents may rise abruptly in several milliseconds to the level of damaging the power electronic devices. The traditional way to protect the VSC-HVDC transmission system is to block the converters on both sides of the line during the fault. With the development of the high-speed DC circuit breakers, protective relays could be a better solution, to minimize the power outage range. As a result, a fast and reliable protection method of the VSC-HVDC system is of great importance.
At present, existing VSC-HVDC transmission line protection methods can be classified into the primary protection schemes and backup protection schemes. When internal faults occur in the transmission lines, the primary protection will operate very fast to isolate the faulted line, while the backup protection will isolate the faulted line with delays when the primary protection fails to operate.
Primary protection methods mainly include traveling wave based protection and voltage derivative protection. Traveling wave based protection [4] utilizes information of traveling wave arrived at terminals of the line to detect internal faults. Researchers also borrow the idea of wavelet transform [5] and apply it to traveling wave protection to detect wavefronts. Traveling wave distance protection [6] locates the fault by finding the arrival time of wavefronts at local terminals of the line. However, the single-ended method cannot ensure instantaneous trip for faults on the entire length of the line. Traveling wave pilot distance protection [7] compares the fault location results at both terminals of the line to ensure instantaneous trip for the entire line. Nevertheless, accurate detection of wavefront arrival time may still be challenging especially during high impedance faults. A traveling wave boundary protection is put forward in [8]. The protection utilizes different characteristics of waveforms before and after the filtering of boundary devices. However, the protection method is based on the existence of boundary devices. Comparing to traveling wave protection, voltage derivative protection [9] is based on the abrupt voltage change during internal faults. However, it may encounter selectivity issues during external faults and the settings of the protection method are hard to be selected.
Backup protection methods mainly include under voltage protection, over voltage protection, and current differential protection. Under voltage and over voltage protections detect internal faults if the measured voltage is not within a certain range near to the nominal voltage [10]. However, the selectivity of the protection scheme cannot be fully guaranteed. Current differential protection examines whether the Kirchhoff’s Current Laws (KCLs) of the line under protection is satisfied. The internal fault is detected if the sum of the terminal currents is not zero. Due to large shunt capacitive currents in VSC-HVDC transmission line especially during system transients, the effectiveness of the method could be affected during external faults. Therefore, the current differential requires a long relaying time [13].
In fact, current differential protection is widely adopted in AC transmission systems as a primary protection function. It can be potentially applied to VSC-HVDC systems as a primary protection function if the shunt capacitive currents can be accurately considered. Dynamic State Estimation (DSE) based protection scheme [11-13] is one of the alternatives to systematically solve this problem. It can be considered as an extension of the current differential protection. The main idea of this method is to monitor the consistency between the accurate dynamic model of the line under protection and the
Yixiong Jia1, Yu Liu1,2,*, Yuzhang Lin3 and Binglin Wang1 1. School of Information Science and Technology, ShanghaiTech University, Shanghai, China
2. Key Laboratory of Control of Power Transmission and Conversion, Ministry of Education, Shanghai, China 3. School of Electrical and Computer Engineering, University of Massachusetts, Lowell, USA
V
This work is sponsored by National Nature Science Foundation of China (No. 51807119), Shanghai Pujiang Program (No. 18PJ1408100) and Key Laboratory of Control of Power Transmission and Conversion (SJTU), Ministry of Education (No. 2015AB04). Their support is greatly appreciated.
978-1-7281-5508-1/20/$31.00 ©2020 IEEEAuthorized licensed use limited to: ShanghaiTech University. Downloaded on December 26,2020 at 15:32:58 UTC from IEEE Xplore. Restrictions apply.

instantaneous terminal measurements. Specifically, the authors have done some previous work to apply the DSE based protection as a primary protection method in VSC-HVDC transmission lines [14]. However, this existing DSE based protection method did not fully consider the redundancy embedded in the protection problem.
This paper proposes an improved DSE base primary protection method on VSC-HVDC transmission lines with full exploitation of information redundancy. In particular, the proposed protection method establishes a new dynamic model of the transmission line under protection, which makes full use of the estimated states and measurements from the previous time step. The trip decision is made if inconsistency is detected between the dynamic model and the measurements. The proposed method is with improved sensitivity, dependability and security compared to the existing DSE based protection approach. The remainder of the paper is arranged as follows. Section II gives the review of the DSE based protection algorithm and derives the proposed approach. Section III provides numerical experiments where the performances of the existing and the proposed method with various faults are examined. Section IV draws a conclusion.
II. PROPOSED DSE BASED PROTECTION WITH FULL EXPLOITATION OF INFORMATION REDUNDANCY
This session will first review the existing DSE based protection method on VSC-HVDC lines. Afterwards, the proposed DSE based protection method with full exploitation of information redundancy will be introduced in detail. A. Review of the Existing DSE Based Protection [14]
1) Dynamic model of the line under protection
C 2R L R RL L
C 2 C 2 C 2 C 2 C 2
( )su t( )si t ( )ri t
( )ru t
( )1u t
( )ju t ( )j 1u t+( )L1i t ( )Lji t ( )Lni t( )n 1u t+
Section 1 Section j Section n
Figure 1. Multi-section transmission line model
The multi-section transmission line model is utilized as shown in Figure 1. The definitions of variables can also be found in the figure. The model can be written in the following matrix form [14],
1 1 1
2 1 2 2 2
3 3 3
( ) ( ) ( ) +0 ( ) ( ) +
( ) ( ) ( ) +n
t t tt t
t t t−
= + = + = +
i A x B dx dtA x B dx dt
u A x B dx dt
(1)
where ( ) ( ) ( ) Ts rt t t=i i i , ( ) ( ) ( ) T
s rt t t=u u u ,
1 1 1( ) ( ) ( ) ( ) ( ) Tn L Lnt t t t t+=x u u i i , jA and
( 1,2,3)j j =B are the corresponding coefficient matrices
expressed by R , L , C and j ( 1,2,3)j = is the measurement error vector.
By utilizing the quadratic integration method, the algebraic and differential equations in (1) can be equivalently transformed into the algebraic equation,
( ),( , ) ( , ) mt tm eqx m eqt t t t= + +z Y x B ε (2)
where, 2mt t h= − , ( , ) ( ) ( ) Tm mt t t t=z z z , ( , ) ( ) ( ) T
m mt t t t=x x x ,
( ) ( ) ( )2 1T
nt t t−= z i 0 u , ( ) ( )eq eqx eqit h t h= − + −B N x M i , h is twice the sampling interval, and eqxY , eqxN , and eqiM are the
corresponding coefficient matrices expressed by jA , jB and
h ( 1,2,3)j = . ( ), mt t is the measurement error vector, with
Gaussian distribution assumption, where ( ), 1cov( )mt t −=W ,
where cov( ) denotes the covariance matrix of vector ( ) . 2) Existing DSE Based Protection Next, we need to solve the state from the dynamic model
defined in (1) or (2). Here the solution of (2) using the weighted- least-squares method is utilized as an example. The best estimate of the state vector is given by,
ˆ( , ) ( ) ( ( , ) )T Tm eqx eqx eqx m eqt t t t− −1x = Y WY Y W z B (3)
where the weight matrix W is the inverse of ( ),cov( )mt tε . The consistency is evaluated using the weighted sum of the
residual squares (also known as the chi-square value), ˆ ˆ ˆ( ) ( , ) ( , )= T
m mJ t t t t tr Wr (4) where the residual vector is defined as,
ˆ ˆ( , ) ( , ) ( , )=m eqx m eq mt t t t t t− −r Y x B z (5) The aforementioned calculation is operated with the time
step of 2h . The trip decision is made if the test value ( )test t remains 1 continuously for a user-defined period of time setT ,
( )( )
( )
1,
0,
set
set
t
sett T
t
sett T
test d Ttrip t
test d T
−
−
==
(6)
where ( )test t indicates the health condition of the system by
comparing ˆ( )J t to a user-defined threshold setJ ,
( ) ( )( )
ˆ1,ˆ0,
set
set
J t Jtest t
J t J
=
(7)
B. Proposed DSE Based Protection Method The validity of the existing DSE based protection method
comes from the following fact: the measurements and the model should always be consistent (normal operating conditions, external faults, system disturbances, etc.) unless there exist some internal faults that change the actual physical model of the transmission line. In this case, the existing method detects an internal fault if any inconsistency is observed between the measurements and the dynamic model of the line under protection. To ensure the reliability of the existing DSE based protection approach, for the value of the consistency indicator ˆ( )J t , we should maximize it during internal faults and
minimize it during all other scenarios. This can be achieved by fully exploit the information redundancy embedded in the protection problem.
The flow chart of the existing method proposed by [11] is show in Figure 2. We can observe that for the next time step, the existing method utilizes the information of ( )ˆ mtx and ( )ˆ mtz ,
but neglects ( )ˆ tx and ( )ˆ tz . Therefore, the proposed method will add these estimated values to the measurement vector at the next time step, to maximize the redundancy of the DSE procedure and optimize the performance of the DSE based protection.
Authorized licensed use limited to: ShanghaiTech University. Downloaded on December 26,2020 at 15:32:58 UTC from IEEE Xplore. Restrictions apply.

Start
Read available measurements(typical measurements: two terminal voltages and currents)
Using state estimation to detect fault, the equation is
The best estimation of the state vector is
The estimation of the measured vector is
Trip decision
ON
for the next iteration
YES
DC breaker isolated the faulted line
( )( )
( )( )
( ), meqx11 eqx12 eq1 t t
eqx21 eqx22 eq2m m
t tt t
= + +
Y Y Bz xY Y Bz x
( )( ) ( ) ( )( )1ˆ
= ,ˆ
T Teqx eqx eqx m eq
m
tt t
t−
−
xY WY Y W z B
x
( )( )
( ),ˆˆ( )ˆˆ( )
mt teqx eq
mm
tttt
= + +
xzY B
xz
2t t h= +
( ) ( )ˆ ˆ,m mt tx z
Figure 2. Flow chart of existing method
Rewrite equation (2) as, ( ) ( )11 12 1 ,
21 22 2
( )( ) ( )
meqx eqx eq t t
eqx eqx eqm m
t tt t
= + +
Y Y Bz xY Y Bz x
(8)
where 11eqxY , 12eqxY , 21eqxY and 22eqxY are matrices with the dimension of (2 3) (2 1)n n+ + , 1eqB and 2eqB are column vectors with the dimension of (2 3)n + .
The proposed DSE based protection approach solves the following dynamic model at step i ,
( )
11 12 1
21 22 2
21 22 2
2 1
( )( ) ( )( ) ( )( )
m
eqx eqx eq
t,tm eqx eqx eq
last m eqx eqx m eq
last m n
tt tt tt
+
= + +
i
z Y Y Bz Y Y x B
z Y Y x Bx 0 E 0
(9)
where the additional measurement ( )last mtx is equal to the estimated state ˆ ( )tx from the last time step, and the additional measurement ( )last mtz is equal to the estimated measurement ˆ( )tz from the last time step. In this case, the information
redundancy that was neglected in the existing approach is fully exploited and considered in the proposed approach.
Rewrite equation (9) in the following compact form, ( ) ( )
_ _( ) mt,tnew m eqx new m eq new it,t t,t= + +z Y x B (10)
where ( )new mt,tz , _eqx newY and _eq newB corresponds to the measurement vector, coefficient matrix and past history vector in equation (9), respectively.
Similar as (3), the best estimate of the state vector is, _ _ _ _ _ˆ( ) ( ) ( ( ) )T T
m eqx new i eqx new eqx new i new m eq newt,t t,t− −1x = Y WY Y W z B (11)
where iW is the inverse of ( )cov( )mt,ti .
Here unlike the weight matrix W in (3), the weight matrix iW is not a constant matrix. This is due to the fact that the
measurement errors corresponding to ( )last mtz and ( )last mtx are with different distributions for different steps. Therefore, the calculation of the weight matrix iW for step i is essential to ensure the validity of the proposed DSE based protection method.
Next, the weight matrix is derived in a recursive way: assume that the weight matrix iW at step i is known, calculate the weight matrix at step 1i + .
To simplify the notation, define iS as _ _ _( )T T
i eqx new i eqx new eqx new i−= 1S Y WY Y W (12)
Substitute (10) into (11), the estimated state vector ˆ ( )tx is, ( ),
(1:2 1)ˆ ( ) ( ) mt t
i irow nt t
++ x = x S ε (13)
where ( : )row a b denotes the submatrix of from row a to row
b. With the estimated state vector ˆ( , )mt tx , one can substitute
ˆ( , )mt tx back to the dynamic model in (10) to obtain the estimated measurements ˆ ( )new mt,tz . Specifically, the estimated measurement ˆ( )tz is,
( ) ( ) ( ),_ (1:2 3)
ˆ = mt teqx new i irow n
t t+
+ z z Y S (14)
Therefore, the measurement error vector for step 1i + is, ( ) ( ) ( ) ( ), , , ,
1 _ (1:2 1)(1:2 3), ,m m m m
Tt t t t t t t t
i eqx new i i i irow nrow nY + ++
= ε S S ε (15)
The weight matrix at step 1i + is,
( )
111 12 13
, 11 12 22 23
13 23 33
cov( )mt t Ti i
T T
−
−+
= =
v v vW ε v v v
v v v (16)
where 111
−=v W , ( )_ :
T12 ex eqx new i row 1 2n 3+
= v W Y S , ( ):
T13 ex i row 1 2n 1+= v W S ,
( ) ( ) ( ) ( ) ( ) ( )
( : , : ) ( ) ( ) ( ) ( )( )2n 3 2n 3 2n 3 2n 3 2n 3 2n 31ex
1 2n 3 1 2n 3 2n 3 2n 3 2n 3 2n 3
+ + + + + +−
+ + + + + +
=
0 0 0W W 0 0 , ( : , : )a b c d
denotes the
submatrix of from row a to b , column c to d ,
( ) ( )_ ::
T23 eqx new i i i row 1 2n 1row 1 2n 3 ++
= v Y S W S , ( ) ( ): :
T33 i i irow 1 2n 1 row 1 2n 1+ += v S W S ,
and ( ) ( )_ _: :
T22 eqx new i i eqx new irow 1 2n 3 row 1 2n 3+ +
= v Y S W Y S .
Therefore, the weight matrix can be updated in each step. The initial weight matrix can be selected as
0 40; 0 4n+=W W E where 44n+E is the identity matrix with the dimension of (4n+4). The overall flow chart of proposed method is show in Figure 3. We can observe that the estimated values of ˆ ( )tx and ˆ( )tz , which are neglected in Figure 2, are carefully considered here with the new approach (see the blue dotted lines). This full exploitation of information redundancy will improve the performance of the DSE based protection.
Start
Read available measurements(typical measurements: two terminal voltages and currents)
Step , use state estimation to detect fault, the equation is
The best estimation of the state vector is
The estimation of the measured vector is
Trip decision
for the next iteration
YES
DC breaker isolated the faulted line
i
2t t h= +
( )( )( )( )
( )( )
( )
2
, m
eqx11 eqx1 eq1
t tm eqx21 eqx22 eq2i
last m meqx21 eqx22 eq2
last m 2n 1
tt tt tt +
= + +
z Y Y Bz xY Y B
z xY Y Bx 0 E 0
( )( ) ( ) ( )( )1
_ _ _ _
ˆ= ,
ˆT T
eqx new i eqx new eqx new i new m eq_newm
tt t
t−
−
xY W Y Y W z B
x
( )( )
( )
( )
,_ _
:
ˆˆ( )ˆˆ( )
mt teqx new eq new i
mm row 1 4n 6
tttt
+
= + +
xzY B
xz
( )ˆ ˆ, ( )m mt tx z ( )ˆ ˆ, ( )t tx z
Figure 3. Flow chart of proposed method
Authorized licensed use limited to: ShanghaiTech University. Downloaded on December 26,2020 at 15:32:58 UTC from IEEE Xplore. Restrictions apply.
III. NUMERICAL EXPERIMENTS To compare our proposed method to the existing method in
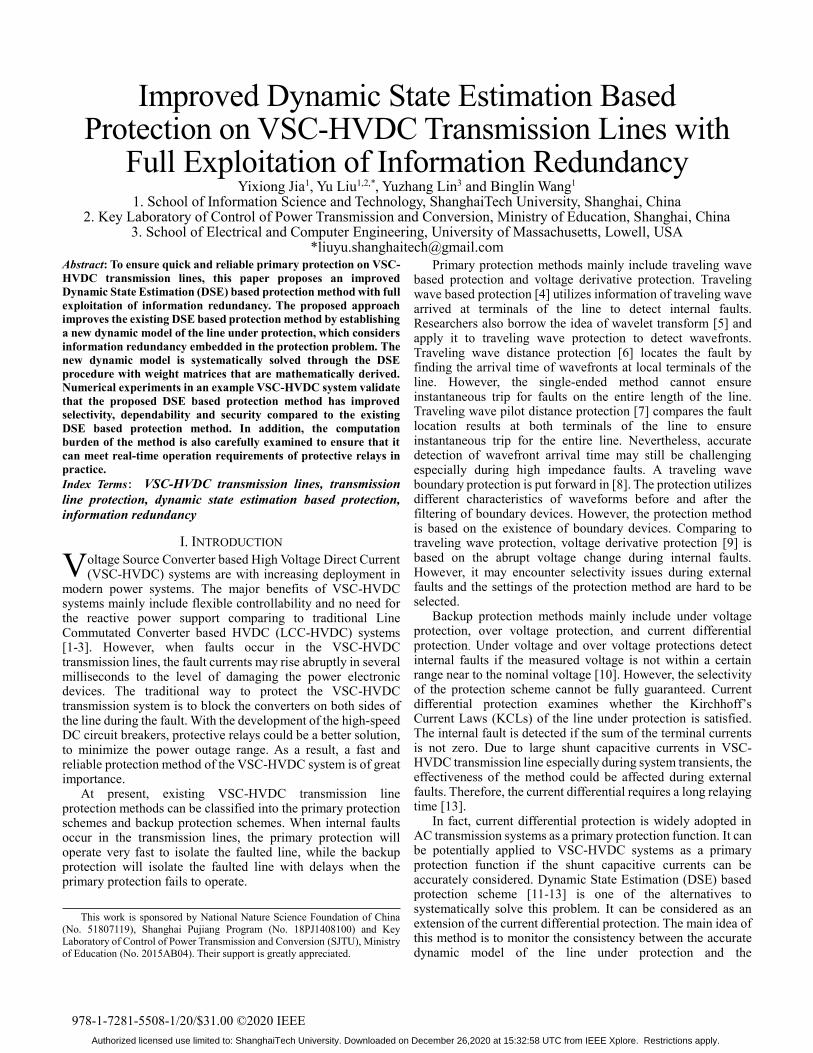
[14], we build an example test system with a VSC-HVDC bipolar transmission line. The transmission line is a ±500kV, 2000 MVA, 300 km transmission line. The line under protection is the positive pole of the system (line S1-R1). The available measurements include voltage and current instantaneous measurements at both terminals of the transmission line. The sampling rate of the measurements is 20 kilo-samples per second. Here the section number of the multi-section π model is selected to be 20, to approximate the distributed shunt capacitance of the transmission line.
S1
S2
R1
R2AC source1 AC source2
RectifierStation
InverterStation
( )ri t( )si t
( )su t ( )ru t1F2F
Figure 4. VSC-HVDC system
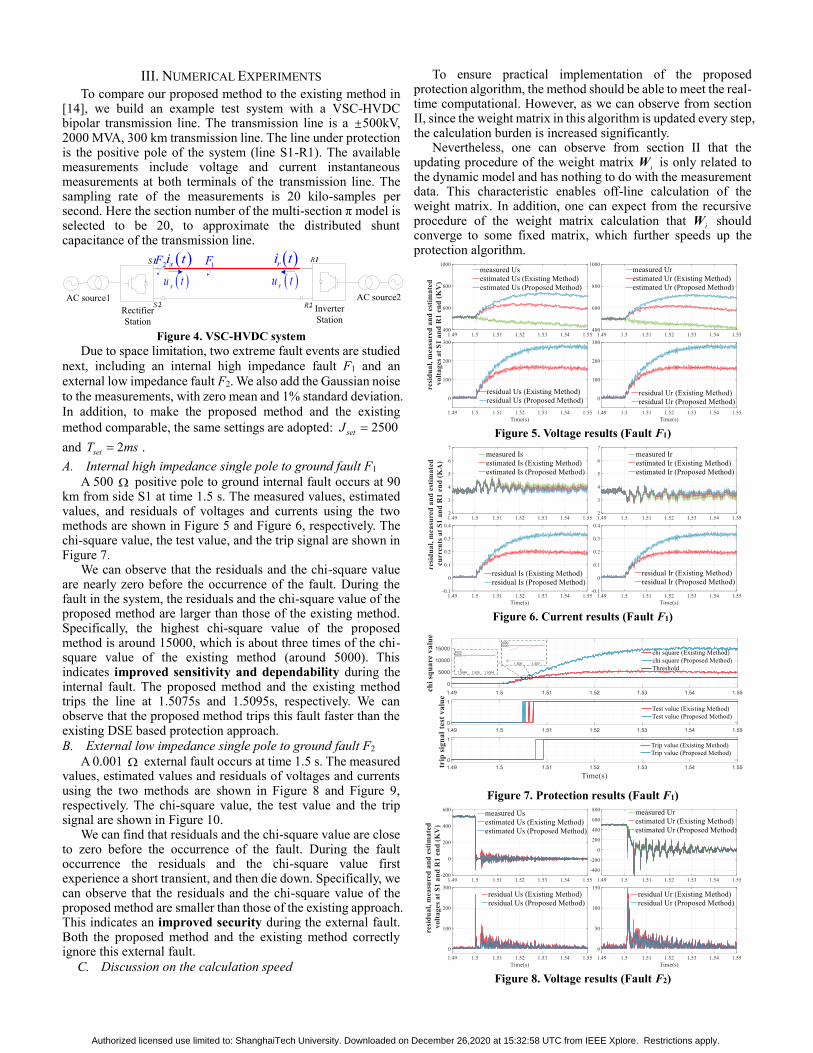
Due to space limitation, two extreme fault events are studied next, including an internal high impedance fault F1 and an external low impedance fault F2. We also add the Gaussian noise to the measurements, with zero mean and 1% standard deviation. In addition, to make the proposed method and the existing method comparable, the same settings are adopted: 2500setJ =and 2setT ms= . A. Internal high impedance single pole to ground fault F1
A 500 positive pole to ground internal fault occurs at 90 km from side S1 at time 1.5 s. The measured values, estimated values, and residuals of voltages and currents using the two methods are shown in Figure 5 and Figure 6, respectively. The chi-square value, the test value, and the trip signal are shown in Figure 7.
We can observe that the residuals and the chi-square value are nearly zero before the occurrence of the fault. During the fault in the system, the residuals and the chi-square value of the proposed method are larger than those of the existing method. Specifically, the highest chi-square value of the proposed method is around 15000, which is about three times of the chi-square value of the existing method (around 5000). This indicates improved sensitivity and dependability during the internal fault. The proposed method and the existing method trips the line at 1.5075s and 1.5095s, respectively. We can observe that the proposed method trips this fault faster than the existing DSE based protection approach. B. External low impedance single pole to ground fault F2
A 0.001 external fault occurs at time 1.5 s. The measured values, estimated values and residuals of voltages and currents using the two methods are shown in Figure 8 and Figure 9, respectively. The chi-square value, the test value and the trip signal are shown in Figure 10.
We can find that residuals and the chi-square value are close to zero before the occurrence of the fault. During the fault occurrence the residuals and the chi-square value first experience a short transient, and then die down. Specifically, we can observe that the residuals and the chi-square value of the proposed method are smaller than those of the existing approach. This indicates an improved security during the external fault. Both the proposed method and the existing method correctly ignore this external fault.
C. Discussion on the calculation speed
To ensure practical implementation of the proposed protection algorithm, the method should be able to meet the real-time computational. However, as we can observe from section II, since the weight matrix in this algorithm is updated every step, the calculation burden is increased significantly.
Nevertheless, one can observe from section II that the updating procedure of the weight matrix iW is only related to the dynamic model and has nothing to do with the measurement data. This characteristic enables off-line calculation of the weight matrix. In addition, one can expect from the recursive procedure of the weight matrix calculation that iW should converge to some fixed matrix, which further speeds up the protection algorithm.
Figure 5. Voltage results (Fault F1)
Figure 6. Current results (Fault F1)
Figure 7. Protection results (Fault F1)
Figure 8. Voltage results (Fault F2)
Authorized licensed use limited to: ShanghaiTech University. Downloaded on December 26,2020 at 15:32:58 UTC from IEEE Xplore. Restrictions apply.

Figure 9. Current results (Fault F2)
Figure 10. Protection results (Fault F2)
To validate this concept, Figure 11 provides the results of 1i i F+ −W W , where F
is the F-norm of the matrix ( ) . One can observe that the weight matrix converges in several iterations. Therefore, we can use this converged weight matrix (a constant matrix) in the proposed protection method and achieve exact the results.
The calculation time per step (using a standard personal computer with intel i7-7700 CPU) are shown in Figure 12, including the existing method, the proposed method (with weight matrix updated in every iteration), and the proposed method (with the converged weight matrix). The time limit is 50 μs, which is the sampling interval of the system. From the figure, we can observe that the proposed method with weight matrix updating cannot meet the real-time computational. Both the proposed method with the converged weight matrix (with the average calculation time of 27.7 μs) and the existing method (with the average calculation time of 13.4 μs) can meet the real-time computational. Note that for spikes in the computational time, a small data buffer is good enough to ensure smooth and real-time operation of the protection method.
Figure 11. Convergence of the weight matrix iW
Figure 12. Time cost in every iteration
IV. CONCLUSION This paper proposes a novel dynamic state estimation based
primary protection method with full exploitation of the information redundancy for the VSC-HVDC transmission lines. The proposed method formulates a new dynamic model of the component under protection, which considers the information redundancy of the estimated states and measurements from the last time step. Numerical experiments demonstrate that the proposed method can reliably operate during internal and external faults, and has improved sensitivity, dependability and security compared to existing dynamic state estimation based protection method in the literature. In addition, the real-time operation of the proposed method is verified to ensure that it is applicable for practical implementation.
REFERENCE [1] N. Flourentzou, V. G. Agelidis and G. D. Demetriades, "VSC-Based HVDC
Power Transmission Systems: An Overview," IEEE Trans. Power Electron., vol. 24, no. 3, pp. 592-602, March 2009.
[2] J. Liu, N. Tai and C. Fan, "Transient-Voltage-Based Protection Scheme for DC Line Faults in the Multiterminal VSC-HVDC System," IEEE Trans. Power Del., vol. 32, no. 3, pp. 1483-1494, June 2017.
[3] W. Leterme, S. Pirooz Azad and D. Van Hertem, "A Local Backup Protection Algorithm for HVDC Grids," IEEE Trans. Power Del., vol. 31, no. 4, pp. 1767-1775, Aug. 2016.
[4] E. Vazquez, J. Castruita, O. L. Chacon and A. Conde, "A New Approach Traveling-Wave Distance Protection—Part I: Algorithm," IEEE Trans. Power Del., vol. 22, no. 2, pp. 795-800, April 2007.
[5] P. Jafarian and M. Sanaye-Pasand, "A Traveling-Wave-Based Protection Technique Using Wavelet/PCA Analysis," IEEE Trans. Power Del., vol. 25, no. 2, pp. 588-599, April 2010.
[6] C. Zhang, G. Song, T. Wang and L. Yang, "Single-Ended Traveling Wave Fault Location Method in DC Transmission Line Based on Wave Front Information," IEEE Trans. Power Del., vol. 34, no. 5, pp. 2028-2038, Oct. 2019.
[7] Q. Huang, G. Zou, S. Zhang and H. Gao, "A Pilot Protection Scheme of DC Lines for Multi-Terminal HVDC Grid," IEEE Trans. Power Del., vol. 34, no. 5, pp. 1957-1966, Oct. 2019.
[8] X. Liu, A. H. Osman and O. P. Malik, "Hybrid Traveling Wave/Boundary Protection for Monopolar HVDC Line," IEEE Trans. Power Del., vol. 24, no. 2, pp. 569-578, April 2009.
[9] J. Suonan, S. Gao, G. Song, Z. Jiao and X. Kang, "A Novel Fault-Location Method for HVDC Transmission Lines," IEEE Trans. Power Del., vol. 25, no. 2, pp. 1203-1209, April 2010.
[10] A. Li, Z. Cai, Q. Sun, X. Li, D. Ren and Z. Yang, "Study on the Dynamic Performance Characteristics of HVDC Control and Protections for the HVDC Line Fault," IEEE Power Energy Soc. Gen. Meet., Calgary, AB, Canada, 2009, pp. 1-5.
[11] Y. Liu, A. P. Meliopoulos, R. Fan and L. Sun, “Dynamic State Estimation Based Protection of Microgrid Circuits”, IEEE Power Energy Soc. Gen. Meet. (PESGM), 2015.
[12] A. P. Meliopoulos, G. Cokkinides, P. Myrda, et al, “Dynamic State Estimation Based Protection: Status and Promise”, IEEE Trans. Power Del., vol. 32, no. 1, pp 320-330, Feb. 2017.
[13] Y. Liu, A. P. Meliopoulos, R. Fan, L. Sun and Z. Tan, “Dynamic State Estimation Based Protection on Series Compensated Transmission Lines”, IEEE Trans. Power Del., vol. 32, no. 5, Oct. 2017, pp 2199-2209.
[14] B. Wang, Y. Liu, “VSC-HVDC Transmission Line Protection Based on Dynamic State Estimation”, IEEE Power Energy Soc. Gen. Meet. (PESGM), 2019.
Authorized licensed use limited to: ShanghaiTech University. Downloaded on December 26,2020 at 15:32:58 UTC from IEEE Xplore. Restrictions apply.