implementaci´on y an´alisis de rendimiento de un …cpaz/downloads/ppt_mpbh.pdf · basado en el...
TRANSCRIPT

Implementacion y analisis de rendimientode un sistema de planeamiento lineal
basado en el modelo MPBH
Tesis para obtener el Tıtulo Profesional de Ingeniero de Sistemas
Christian Danniel Paz Trillo
Miembros del Jurado:Lic. Wilber Ramos Lovon.Lic. Percy Huertas Niquen.PhD. Ernesto Cuadros Vargas.
Escuela Profesional de Ingenierıa de SistemasUniversidad Nacional de San Agustın - Arequipa - Peru
Analisis de Rendimiento de MPBH 1

Agenda
I Introduccion
I Planeamiento en IA
I Principales Sistemas de Planeamiento
I Planeador MPBH
I Resultados
I Discusion
Analisis de Rendimiento de MPBH 2

Introduccion
I El problema de planeamiento consiste en la identificacion del conjunto deacciones que aplicadas a un estado inicial generan un estado que satisface lascondiciones meta.
I MPBH: Modelo de Planeamiento basado en busqueda heurıstica, propuestorecientemente en la EPIS-UNSA.
I Analisis de rendimiento comparativo de MPBH con STAN, HSP, FF y Black-box.
Analisis de Rendimiento de MPBH 3

Objetivos - Introduccion
I Analizar el rendimiento de MPBH en comparacion con otros siste-mas de planeamiento para identificar fortalezas y proponer mejorasa puntos identificados como debilidades.
I Determinar las muestras y las variables para la medicion del rendimiento.
I Ejecutar las pruebas para medir el rendimiento de MPBH y de STAN, HSP,FF y Blackbox, en funcion de las variables identificadas.
I Realizar el analisis comparativo de los resultados obtenidos en las mediciones.
I Analizar los procesos e identificar puntos debiles y ventajas.
I Proponer alternativas a los puntos debiles e implementarlas para verificar suaporte al modelo.
Analisis de Rendimiento de MPBH 4

Hipotesis y Variables - Introduccion
I Hipotesis: El planeador MPBH es competitivo en terminos de numero deproblemas resueltos frente a los planeadores STAN, HSP, FF y Blackbox deeficacia comprobada.
I Variables:
Valor IndicadoresIndependientes Planeadores STAN, HSP, FF,Blackbox y MPBHDependientes Competitividad Nro. de Problemas resueltos
Rendimiento Tiempo de ProcesamientoNro. de Estados GeneradosTamano de PlanTiempo Calculo Heurıstica
Analisis de Rendimiento de MPBH 5

Determinacion de la muestra - Introduccion
I Dos ambitos de prueba:
• Monodominio: Estudio especial considerando problemas de un unicodominio de planeamiento: el mundo de los bloques.Tamano de muestra: 160, error 0,1.
• Multidominio: Estudio considerando problemas de los dominios: mun-do de los bloques, elevador, logıstica y satelite.Tamano de muestra: 53, error 0,17. 99 % de porcentaje del universoal que se puede generalizar la hipotesis.
Analisis de Rendimiento de MPBH 6

Planeamiento en IA
I Area de investigacion dentro de IA.
I Consiste en la identificacion del conjunto de acciones que aplicadas a unestado inicial generan un estado que satisface las condiciones meta.
I Planeamiento dependiente del dominio: Implementaciones utilizan conoci-miento especıfico del dominio.
I Planeamiento independiente del dominio: Extraen informacion de la especi-ficacion del problema de planeamiento.
Analisis de Rendimiento de MPBH 7

El Problema - Planeamiento en IA
I Ejemplo del mundo de los bloques.
I Objetos y Tipos: b: Bloque.
I Atomos y Predicados: Sobre(b,a) : Sobre(X: Bloque, Y: Blo-que).
I Estados: Situacion en el mundo, es definido por el conjunto de condicio-nes(atomos) que son verdaderos en el. {Sobre(b,a), Sobre(c,b), ...}.
I Accion: Funcion que modifica un estado del mundo. MoverAMesa(c,b): MoverAMesa(X: Bloque, Origen: Bloque) hace que Sobre(c, b) nosea mas verdadero(efecto negativo) y hace que Sobre(c, mesa) sea verda-dero(efecto positivo). Para que la accion sea aplicable, hace falta que tantoSobre(c,b) como Libre(c) sean verdaderos(precondiciones).
I Dominio: Acciones y Predicados.
Analisis de Rendimiento de MPBH 8

Enfoques - Planeamiento en IA
I Busqueda en Espacio de Estados : Espacio de estados E =(V,A, i, M):
• V es un conjunto de vertices, donde cada vertice v representa unestado alcanzable desde el estado inicial i,
• A es un conjunto de aristas dirigidas, donde cada arista etiquetada cona une dos vertices v1 y v2 ssi existe una accion a talque prec(a) ⊆ v1,y v2 = v1\ ef neg(a)∪ ef pos(a),
• i ∈ V es el estado inicial,• M : {m ∈ M,G ⊆ m} es el conjunto de estados meta.
Problema de planeamiento: encontrar un camino(el mas corto) entre el verti-ce i y cualquier vertice del conjunto M . Ej: HSP y FF.
I Planeamiento de Orden Parcial : Busqueda de planes parcialmente or-denados en que cualquier ordenacion topologica genere un plan valido total-mente ordenado. Ej: TWEAK, SNLP y UCPOP.
Analisis de Rendimiento de MPBH 9

Enfoques - Planeamiento en IA
I Grafo de Planeamiento: G = (V P, V A, AP,AEP,AEN, I)• V P : cjto de nodos proposicionales(atomos),• V A: cjto de nodos de acciones,• AP : cjto de aristas de precondiciones, dirigida de un nodo propo-
sicional p a un nodo de accion a, siempre que p ∈ prec(a),• AEP : cjto de aristas de efectos positivos, dirigida de un nodo de
accion a a un nodo proposicional p, siempre que p ∈ ef pos (a),• AEN : cjto de aristas de efectos negativos,• I : cjto de nodos proposicionales del estado inicial y forman el primer
nivel del grafo,• grafo estructurado por niveles, los nodos de cada nivel solo se enlazan
con los del siguiente nivel,• primer y ultimo niveles compuestos de nodos proposicionales y los
niveles se intercalan entre proposicionales y de acciones,• ultimo nivel: debe incluir las condiciones meta.
Analisis de Rendimiento de MPBH 10

Enfoques - Planeamiento en IA
I Grafo de Planeamiento(cont.)
• El algoritmo genera el grafo de planeamiento adicionando un nivel deacciones y uno proposicional en cada paso,
• el grafo de planeamiento es generado en tiempo polinomial y contieneinformacion interesante acerca del problema.
Ej: Graphplan, IPP, FF y STAN.
I Planeamiento con Logica Proposicional :
• Expresa un problema de planeamiento en logica proposicional parapoder utilizar un algoritmo SAT.
• La atribucion que satisface el problema SAT es convertida en un planque el algoritmo retorna como respuesta.
• Los algoritmos SAT son bastante estudiados dada su importancia com-putacional, y hay muchos progresos en esta area.
Ej: SATPlan y Blackbox.
Analisis de Rendimiento de MPBH 11

HSP - Principales Sistemas de Planeamiento
I Heuristic Search Planner.
I Innovo la solucion de problemas de planeamiento con busqueda heurıstica:problema relajado.
I HSP propone la relajacion automatica de un problema de planeamiento: des-considerando los efectos negativos de las acciones se puede llegar a solucionesmas rapido.
I El tamano de una solucion del problema relajado es una heurıstica que guiala busqueda en el problema original.
I Usa el algoritmo weighted A∗, que permite dar importancia al estimadoheurıstico.
I Calcula su heurıstica usando un algoritmo de programacion dinamica paracalculo de ruta mınima en un grafo dirigido.
Analisis de Rendimiento de MPBH 12

HSP - Principales Sistemas de Planeamiento
I HSP es eficiente en numero de problemas resueltos.
I Frecuentemente emplea mayor tiempo de procesamiento.
I Frecuentemente genera planes mas grandes.
I El calculo de la heurıstica de HSP consume aproximadamente el 85% de sutiempo total de procesamiento.
I HSPr es una variacion de HSP que efectua una busqueda regresiva, lo que lepermite calcular la heurıstica una sola vez.
I HSPr sin embargo no garantiza ser mejor en todos los dominios, como en elmundo de los bloques.
Analisis de Rendimiento de MPBH 13

FF - Principales Sistemas de Planeamiento
I Fast Forward.
I Al igual que HSP realiza una busqueda progresiva, utilizando un algoritmode busqueda local llamado Hill-climbing reforzado.
I La relajacion del problema es resuelta utilizando grafos de planeamiento.
I La implementacion del grafo de planeamiento en FF es altamente optimizada.
I FF ha demostrado una alta competitividad pues fue seleccionado como par-te del grupo A en la Competencia de Planeamiento del ano 2000, por sueficiencia en terminos de tiempo y cantidad de problemas resueltos.
Analisis de Rendimiento de MPBH 14

STAN - Principales Sistemas de Planeamiento
I Originalmente basado en Graphplan.
I Utiliza el sistema de analisis de dominio TIM.
I Identifica tipos de objetos asociando a ellos el concepto de movilidad.
I Posee una implementacion optimizada de las relaciones mutex del grafo deplaneamiento propuesto en Graphplan.
I TIM detecta las relaciones mutex mas eficientemente que Graphplan.
I STAN posee un mejor rendimiento que el algoritmo Graphplan original.
I STAN presenta un rendimiento menor al de los planeadores FF y HSP engeneral.
Analisis de Rendimiento de MPBH 15

Blackbox - Principales Sistemas de Planeamiento
I Combina grafos de planeamiento y logica proposicional.
• El problema es convertido a un grafo de planeamiento de longitud k enque el ultimo nivel del grafo contiene las condiciones meta. Los mutexesse calculan dentro del grafo. Un mutex es la disyuncion de dos objetosnegados, y los algoritmos SAT toman ventaja de esto para calcular lassoluciones mas rapido.
• El grafo de planeamiento es convertido a una formula en notacion CNF,la cual es simplificada automaticamente por un algoritmo general desimplificacion de formulas.
• La formula es solucionada por un algoritmo SAT: Walksat(local),chaff, satz o relsat(globales).
• Si se encontro una solucion al CNF, la asignacion de valores a variablesencontrada por el algoritmo es traducida a un plan y este resultado esdado como respuesta. En caso de no encontrarse una respuesta, k esincrementado en 1 y el proceso se repite.
Analisis de Rendimiento de MPBH 16
Blackbox - Principales Sistemas de Planeamiento
I Blackbox presento un mejor rendimiento que los planeadores basados engrafo de planeamiento como STAN.
I Cabe resaltar que el rendimiento de Blackbox depende fuertemente del ren-dimiento del resolutor SAT utilizado.
I La comunidad que desarrolla algoritmos para solucionar el problema SAT esgrande, y avanza a un ritmo mas acelerado que la comunidad de planeamien-to.
I Cada ano surgen nuevos resolutores SAT los cuales permiten que sin necesi-dad de modificar Blackbox su desempeno sea mejorado.
Analisis de Rendimiento de MPBH 17

Planeador MPBH
I Modelo de Planeamiento basado en Busqueda Heurıstica.
I Ejecuta una busqueda heurıstica en el espacio de estados del problema deplaneamiento.
I Propone una funcion heurıstica que utiliza la informacion generada por elgrafo de planeamiento del problema relajado para cada estado evaluado,la relevancia de la heurıstica esta en la seleccion de las acciones para lageneracion del plan relajado.
Analisis de Rendimiento de MPBH 18

Estructura - Planeador MPBH
Analisis de Rendimiento de MPBH 19

Busqueda - Planeador MPBH
Analisis de Rendimiento de MPBH 20

Grafo de Planeamiento - Planeador MPBH
Analisis de Rendimiento de MPBH 21

STRIPS - Planeador MPBH
I STanford Research Institute Problem Solver.
I Fue uno de los primeros planeadores, y propuso un lenguaje derivado deLISP para representar problemas de planeamiento.
I La notacion PDDL fue adoptada por las competiciones internacionales comoun estandar para describir problemas de planeamiento.
I Un dominio tiene un nombre y define los tipos, predicados y acciones permi-tidas.
I Un problema tiene un nombre, un dominio asociado y define los obje-tos(asociados a sus tipos), y una descripcion completa del estado inicial ycondiciones meta.
Analisis de Rendimiento de MPBH 22

Criterios de Evaluacion: Resultados
I Evaluacion por numero de problemas resueltos.
I Evaluacion de tiempo de procesamiento, numero de estados generados y lon-gitud de plan alcanzado.
I Evaluacion de tiempo de calculo de la heurıstica.
I Uso de dominios estandar para evaluacion utilizados en competencias inter-nacionales.
I Dos ambitos: monodominio(mundo de los bloques) y multidominio(mundode los bloques, logıstica, elevador y satelite).
I Muestras: 160 problemas para el mundo de los bloques y 53 problemas en elambito multidominio.
I Lımite de tiempo de ejecucion: 10 minutos.
Analisis de Rendimiento de MPBH 23

Nro. de Problemas Resueltos: Mundo de los Bloques
Analisis de Rendimiento de MPBH 24

Nro. de Problemas Resueltos: Multidominio
Analisis de Rendimiento de MPBH 25

Resultados: Problemas Resueltos
I En el ambito monodominio el planeador MPBH resolvio menos problemasque los demas planeadores: Se rechaza con 100 % de confianza la hipotesisen que El planeador MPBH es competitivo en terminos de numerode problemas resueltos frente a los planeadores STAN, HSP, FFy Blackbox de eficacia comprobada para el dominio del mundo de losbloques.
I En el ambito multidominio MPBH resolvio una cantidad de problemas enpromedio equivalente a los resueltos por los otros planeadores. Se cumple conun valor de entre 90 % y 95 % de confianza, la hipotesis en que El planea-dor MPBH es competitivo en terminos de numero de problemasresueltos frente a los planeadores STAN, HSP, FF y Blackbox deeficacia comprobada
Analisis de Rendimiento de MPBH 26

Analisis adicional: Mundo de los bloques
Longitud de plan Tiempo de Procesamiento
Estados generados
Analisis de Rendimiento de MPBH 27

Analisis adicional: Satelite
Longitud de plan Tiempo de Procesamiento
Estados generados
Analisis de Rendimiento de MPBH 28

Analisis adicional: Elevador
Longitud de plan Tiempo de Procesamiento
Estados generados
Analisis de Rendimiento de MPBH 29
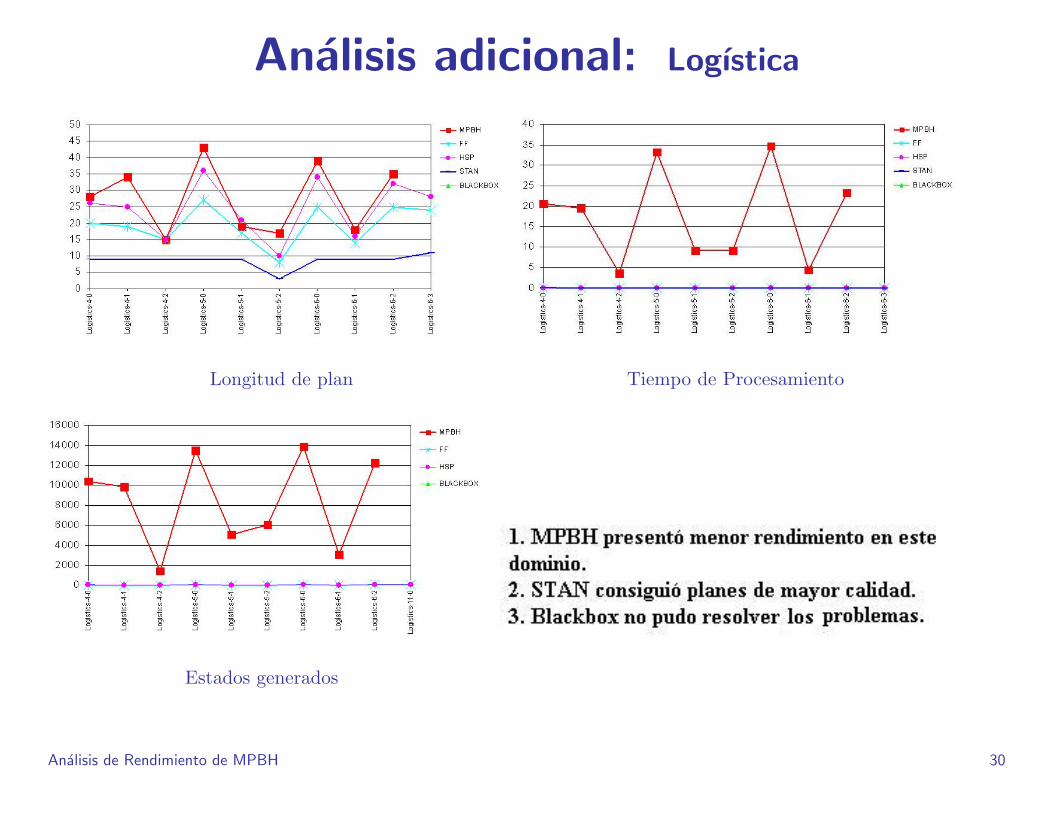
Analisis adicional: Logıstica
Longitud de plan Tiempo de Procesamiento
Estados generados
Analisis de Rendimiento de MPBH 30

Calculo de Heurıstica: Resultados
Mundo de los Bloques Satelite
Elevador Logıstica
Analisis de Rendimiento de MPBH 31

Analisis del Calculo de Heurıstica: Resultados
I El calculo de heurıstica consume un pequeno porcentaje deltiempo total de procesamiento.
I La busqueda consume un alto porcentaje de tiempo, dado quela busqueda local efectua solo las comparaciones necesarias, sedebe reducir el numero de estados evaluados por el algoritmode busqueda en anchura.
I Es necesario realizar un procedimiento de poda en el espacio deestados utilizando informacion del grafo de planeamiento.
I Como se tiene un plan pre-elaborado, las acciones que se se-leccionaron para ese plan son considerados utiles y los estadosgenerados por ese tipo de acciones deben ser evaluados con ma-yor prioridad.
Analisis de Rendimiento de MPBH 32

Poda de estados: Longitud de plan
Mundo de los bloques Satelite
Elevador Logıstica
Analisis de Rendimiento de MPBH 33

Poda de estados: Tiempo de procesamiento
Mundo de los bloques Satelite
Elevador Logıstica
Analisis de Rendimiento de MPBH 34
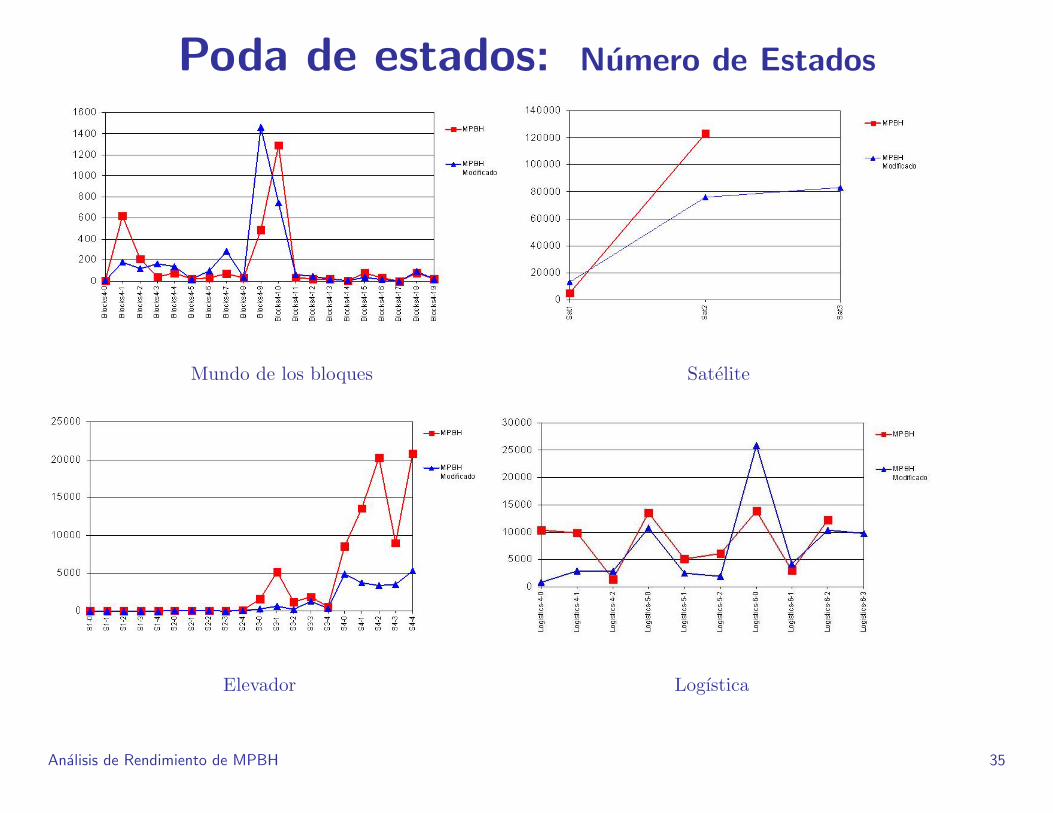
Poda de estados: Numero de Estados
Mundo de los bloques Satelite
Elevador Logıstica
Analisis de Rendimiento de MPBH 35

Analisis del Calculo de Heurıstica: Resultados
I Despues de implementar la poda, se comparo el tiempo de pro-cesamiento, el numero de estados generados y la calidad de losplanes encontrados.
I Se disminuyo drasticamente el tiempo de procesamiento y elnumero de estados generados en la mayorıa de dominios.
I La calidad de los planes disminuyo en la mayorıa de dominios.
I Solo en el dominio del mundo de los bloques no se consiguio me-joras significativas.
Analisis de Rendimiento de MPBH 36

Conclusiones y Recomendaciones
I MPBH lleva en promedio mayor tiempo de procesamiento que los otros pla-neadores de efectividad comprobada.
I MPBH encuentra soluciones de calidad equivalente o menor a los planeadoresde efectividad comprobada.
I El calculo de heurıstica consume un porcentaje mınimo del tiempo total deprocesamiento.
I MPBH genera un mayor numero de estados en la busqueda de la solucion. Lamayor cantidad de nodos es generada por la busqueda en anchura utilizadadurante el algoritmo Hill-climbing reforzado.
I Problema: expansion de estados sin criterio de seleccion.
I Propuesta: realizar una poda que asigna diferentes prioridades a los esta-dos expandidos (mayor prioridad a los generados por acciones seleccionadasdurante el calculo de la heurıstica).
Analisis de Rendimiento de MPBH 37

Conclusiones y Recomendaciones
I Esto redujo considerablemente la cantidad de nodos generados, y por conse-cuencia el tiempo de procesamiento en tres de los cuatro dominios de prueba.Sin embargo, la calidad de los planes se vio reducida.
I STAN y HSP poseen limitaciones en su procesamiento del PDDL. Black-box no pudo resolver ningun problema concerniente al dominio de Logıstica.Solo MPBH y FF resolvieron problemas de todos los dominios evaluados:Planeador independiente de dominio.
I El problema de planeamiento es un problema altamente complejo y existenproblemas que, a pesar de tener solucion, pueden tomar tiempos no acepta-bles en ser resueltos.
I Es necesario sopesar entre dar mayor eficiencia a un planeador y garantizarque resuelva la mayor cantidad de problemas posibles.
Analisis de Rendimiento de MPBH 38

Aportes
I Recopilacion del estado del arte del problema de planeamiento.
I Comparacion especıfica en funcion del tiempo general de procesamiento, es-pacio requerido para resolver los problemas y calidad de solucion entre losplaneadores mas reconocidos para un conjunto de dominos diferentes.
I Analisis estadıstico del χ2 para comparacion de los planeadores tanto endominios individuales como en multiples dominios.
I Deteccion de fortalezas, debilidades para MPBH y propuesta de mejora.
I Mejora en el algoritmo de busqueda en anchura que permitio reducir la can-tidad de estados generados y el tiempo total de procesamiento en promedio.Permitio resolver problemas que el MPBH original no pudo resolver.
Analisis de Rendimiento de MPBH 39

Dificultades Encontradas
I Los tamanos de muestras requeridos para conseguir un alto grado de con-fianza para la demostracion de la hipotesis es grande para universos infinitos,como es el caso del conjunto de problemas de planeamiento.
I Elaboracion de la baterıa de pruebas, con generacion aleatoria de problemas
I Ejecucion de las pruebas.
Analisis de Rendimiento de MPBH 40

Trabajo futuro
I Optimizar EDs del planeador MPBH, para mejorar los tiempos de respues-ta del mismo. Es importante trabajar sobre este modelo, dado que se de-mostro que tiene un gran potencial en cantidad de problemas resueltos.
I Identificar las causas que llevan a obtener planes de menor calidad con laaplicacion de la poda de acciones utiles; pues si bien es cierto que es impor-tante obtener mejora en el tiempo total de procesamiento, la calidad de losplanes no debe ser afectada.
I Investigar variaciones de algoritmos de busqueda(estrategia y direccion) conla heurıstica MPBH.
I Analizar las caracterısticas especıficas de los dominios que hacen que el pla-neador MPBH tenga menor rendimiento, como los de logıstica y satelite.
Analisis de Rendimiento de MPBH 41