hyperspatial mapping of water, energy and carbon...
TRANSCRIPT

Sheng Wang1, Jakob Jakobsen2, Andreas Ibrom1, Peter Bauer-Gottwein1, Monica Garcia1
Hyperspatial mapping of water, energy and carbon fluxes with an Unmanned Aerial System
23/02/2018
1. Department of Environmental Engineering, Technical University of Denmark, 2800 Kgs.
Lyngby, Denmark
2. National Space Institute, Technical University of Denmark, 2800 Kgs. Lyngby, Denmark

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Outline
• 1. Introduction
• 2. Objective and method
• 3. Study region
• 4. Results
• 5. Conclusion & Future work
2 Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
UAS: important remote sensing tool
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 3
High spatial resolution (<1m)
Flexible time and location
Cloudy and overcast is OK
Low cost
Combine sensors
Bridge satellite and tower based remote sensing
Reality Aircraft and satellite UAS
<1 m 30-60 m 1-3 km
1. Introduction
incre
ase s
patial
resolu
tion

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Ecosystems: natural and agricultural
• UAS integrated ecosystem monitoring system: adaptive management
– Snapshot estimation of soil moisture (SM), gross primary productivity
(GPP) and evapotranspiration (ET) (spatial)
– Continuous estimation of SM, GPP and ET (temporal)
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 4

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
2. Objective
Operational framework to continuously estimate SM, GPP and ET from UAS
optical and thermal imagery for various weather conditions.
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 5
High quality UAS Image:
Irradiance changing due to cloud moving, especially for high latitudes
Low irradiance for overcast and cloudy days
Snapshot estimation:
Operational and robust (physical based) methods to estimate SM, GPP and ET
SM, GPP and ET could be estimated by one flight campaign
Parsimonious model (few ground observations, data-scarcity regions)
Continuous estimation:
Temporal interpolation between UAS image acquisitions

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
2. Method
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 6
Platform
Payload
Models
+
+
ET and GPP
GPP:CO2 assimilation
ET: water consumption
UAS monitoring system:
<1m resolution, various weather conditions

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Platform
Smart UAV
A collaboration between
• Sky watch A/S (in charge of designing the vehicle)
• DTU Space and Environment (in charge of payload and sensor integration)
Apprentice S
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 7
Hexacopter DJI s900
Requirement: 2kg payload

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Payload
2. Thermal infrared camera: Flir Tau 324
3. Multi-spectral camera: TetraMini MCA 4. Cosine receptor + Ocean Optics FLAME-VIS-NIR
1. Sony DSC-RX100
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 8
350-1000nm
7.5–13.5μm
Total weight: 2kg

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 9
Models
Workflow for data processing and modeling:

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
UAS flight campaigns
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 10
Number Date Time weather condition
1 11-04-2016 9:33-10:15 cloudy
2 02-05-2016 14:20-14:57 cloudy
3 12-05-2016 10:14-11:05 sunny
4 25-05-2016 10:01-10:33 sunny
5 01-08-2016 11:06-12:50 overcast
6 15-08-2016 14:00-14:30 cloudy
7 20-09-2016 10:45-12:15 cloudy
8 07-10-2016 11:01-12:05 sunny
9 19-05-2017 11:52-15:39 sunny
10 22-05-2017 10:19-10:38 cloudy
11 26-05-2017 11:13-14:46 sunny
12 18-06-2017 12:27-13:01 cloudy
13 28-06-2017 13:12-15:45 cloudy

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
3. Study site
• DTU Risø campus willow-field EC flux site (DK-RCW)
– 11 ha willow bioenergy plantation
– mean annual temperature 8.5 ℃ and precipitation 600 mm
– Loamy soil
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 11
Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
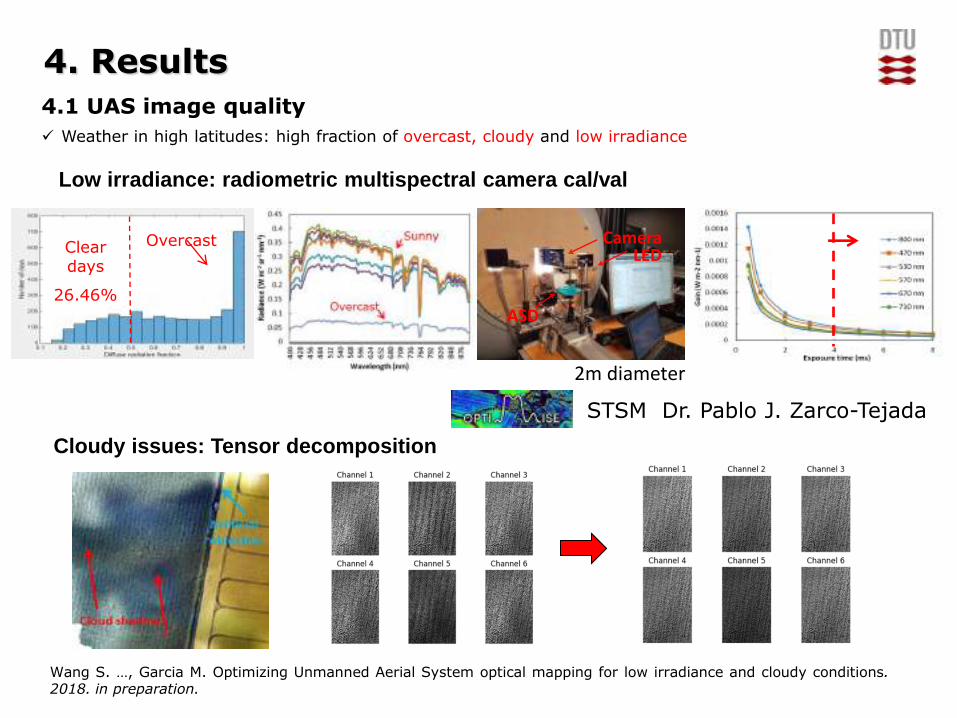
4. Results
4.1 UAS image quality
Weather in high latitudes: high fraction of overcast, cloudy and low irradiance
Overcast Clear days
26.46%
Low irradiance: radiometric multispectral camera cal/val
Camera LED
ASD
Cloudy issues: Tensor decomposition
2m diameter
STSM Dr. Pablo J. Zarco-Tejada
Wang S. …, Garcia M. Optimizing Unmanned Aerial System optical mapping for low irradiance and cloudy conditions. 2018. in preparation.

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
4.2 UAS snapshot estimation
𝜆𝐸𝑖 = 𝑓𝑤𝑒𝑡𝜆𝐸𝑝𝑐
𝜆𝐸𝑐 = 1 − 𝑓𝑤𝑒𝑡 𝑓𝑔𝑓𝑇𝑓𝑀𝜆𝐸𝑝𝑐
𝜆𝐸𝑆 = 𝑓𝑆𝑀𝜆𝐸𝑝𝑠
GPP: Light use Efficiency model (Monteith et al., 1977) ET: Priestley-Taylor Jet Propulsion Laboratory model (Fisher et al., 2008) unify two models with the same constraints on canopy carbon assimilation
and transpiration
𝐺𝑃𝑃 = 𝜀𝑚𝑎𝑥𝑓𝑔𝑓𝑇𝑓𝑀𝑓𝑉𝑃𝐷𝐴𝑃𝐴𝑅
Biophysical constraints limiting transpiration
and assimilation
Absorbed PAR radiation
Max light use efficiency
Wang S. Ibrom A, Bauer-Gottwein P, Garcia M. Incorporating diffuse radiation into a light use efficiency and evapotranspiration model: An 11-year study in a high latitude deciduous forest. Agricultural and Forest Meteorology 248 (2018): 479-493.
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 13
‘Top-down’: treat canopy as a whole, down-regulate the potential to the actual values operational, less parameterization and fewer inputs
VI: NDVI Radiation (Swin, Swout,
Lwin, LWout) Ta, RH, P, WS
Inputs:
Navigation Tetra MCA Cosine receptor +radiometer
Flir Tau2 Weather station

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 14
Volumetric soil moisture estimation from Unmanned Aerial System thermal and optical imagery
Temperature-vegetation dryness index (TVDI, Sandholt et al., 2002; Garcia et al., 2014)
Surface energy balance + PM
TVDI =𝑇𝑠 𝑚𝑎𝑥,𝑖 − 𝑇𝑠𝑚𝑖𝑛
𝑇𝑠𝑚𝑎𝑥 − 𝑇𝑠𝑚𝑖𝑛= 1 −
𝜃𝑣 − 𝜃𝑚𝑖𝑛
𝜃𝑚𝑎𝑥 − 𝜃𝑚𝑖𝑛
4.2 UAS snapshot estimation
Zhu et al., 2017
Green vegetation fraction
Cor
rect
ed L
ST (℃
)
LST NDVI TVDI

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 15
(a) (b)
(a) 5 cm (b) 15 cm (c) 30 cm
Temperal validation
(a) No buffer (b) 0.5m buffer (c) 1.0m buffer
(d) 1.5m buffer (e) 2.0m buffer (f) 2.5m buffer
Spatial validation
Wang S. …, Garcia M. Estimation of volumetric soil moisture from Unmanned Aerial System based thermal and optical imagery. 2018. To be submitted.
4.2 UAS snapshot estimation
soil moisture

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 16
4.2 UAS snapshot estimation
Eddy covariance footprint model (Kljun et al., 2015)
GPP: RMSE = 2.04 μmol∙C∙m-2∙s-1
ET: RMSE = 17.82 W∙m-2
Wang S. …, Garcia M. Hyperspatial mapping evapotranspiration and gross primary productivity from UAS optical and thermal imagery. 2018. In preparation.
Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
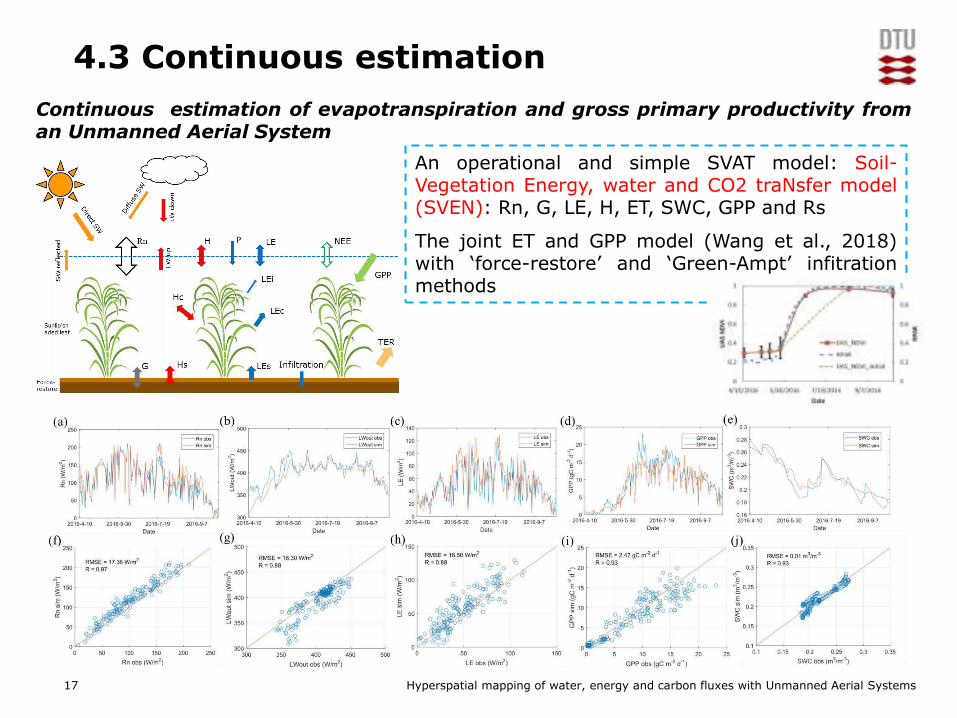
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 17
Continuous estimation of evapotranspiration and gross primary productivity from an Unmanned Aerial System
An operational and simple SVAT model: Soil-Vegetation Energy, water and CO2 traNsfer model (SVEN): Rn, G, LE, H, ET, SWC, GPP and Rs
The joint ET and GPP model (Wang et al., 2018) with ‘force-restore’ and ‘Green-Ampt’ infitration methods
4.3 Continuous estimation

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems 18
Ensemble Kalman filter data assimilation: LST->SVEN
4.2 Continuous estimation
Continuous estimation of evapotranspiration and gross primary productivity from an Unmanned Aerial System
Wang S. …, Garcia M. Continuous estimation of evapotranspiration and gross primary productivity from an Unmanned Aerial System. In preparation.

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Conclusion
19 Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial Systems
We designed an operational UAS based continuous monitoring
system, including payload and models, to estimate SM, GPP and
ET for various weather conditions.
To achieve continuous modeling the system merges a ‘top-
down’ remote sensing model for GPP and ET with time-
dynamic modules for ground heat flux and infiltration.
Good accuracy of SM, GPP and ET is obtained over a willow forest
flux site.

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Future work
Future work will focus on SCOPE model to incorporate optical
reflectance and thermal information to retrieval biophysical and
biochemical parameters to improve GPP and ET estimation from
UAS imagery with a ‘bottom-up’ approach.
Hyperspatial mapping of water, energy and carbon fluxes with Unmanned Aerial System 20
STSM
Dr. Christiaan van der Tol

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Acknowledgement
Monica Garcia DTU-Environment
Andreas Ibrom DTU-Environment
Peter Bauer-Gottwein DTU-Environment
Jakob Jakobsen DTU-Space
Veronica Sobejano Paz DTU-Environment
Filippo Bandini DTU-Environment
Christian Josef Köppl DTU-Environment
Xin Liu Sino-Danish Center
Daniel Olesen DTU-Space
Carsten Dam-Hansen DTU-Photonics
Andreas Baum DTU-Compute
Majken Caroline Looms Zibar Copenhagen University
STSM
Dr. Christiaan van der Tol
STSM
Dr. Pablo J. Zarco-Tejada

Add Presentation Title in Footer via ”Insert”; ”Header & Footer”
Thanks for your attentions!