how to select the right camera using the emva 1288 standard · how to select the right camera using...
TRANSCRIPT
How to select the right camera using
the EMVA 1288 standard ?
A. Darmont - [email protected]
J. Caron - [email protected]

Agenda
• EMVA 1288 motivations
• Basic principles
• Measurements
• Template camera datasheet
• Examples
20 Sept. 2017 ENOVA Show | Paris

EMVA 1288 motivations
• European Machine Vision Association initiative - www.emva.org
• Define a unified method to measure, compute and present specification parameters for cameras and image sensors used for machine vision applications
• Data presentation guidelines for easy comparison of cameras and image sensors
• First release in August 2005
20 Sept. 2017 ENOVA Show | Paris

Basic principles
● Based on mathematical models
● Provides test methods to robustly extract device parameters
● All parameters are based on physical quantities (no lux, lumen, foot candle)
● Defined so that little freedom is left to the user → fair reporting, allows for direct comparison of devices
● Reproducible and repeatable measurements
20 Sept. 2017 ENOVA Show | Paris
Basic principles
● 3 basic formulas
– Linear signal model– Photon Transfer Method– Signal-to-Noise ratio
20 Sept. 2017 ENOVA Show | Paris

Basic principles
20 Sept. 2017 ENOVA Show | Paris

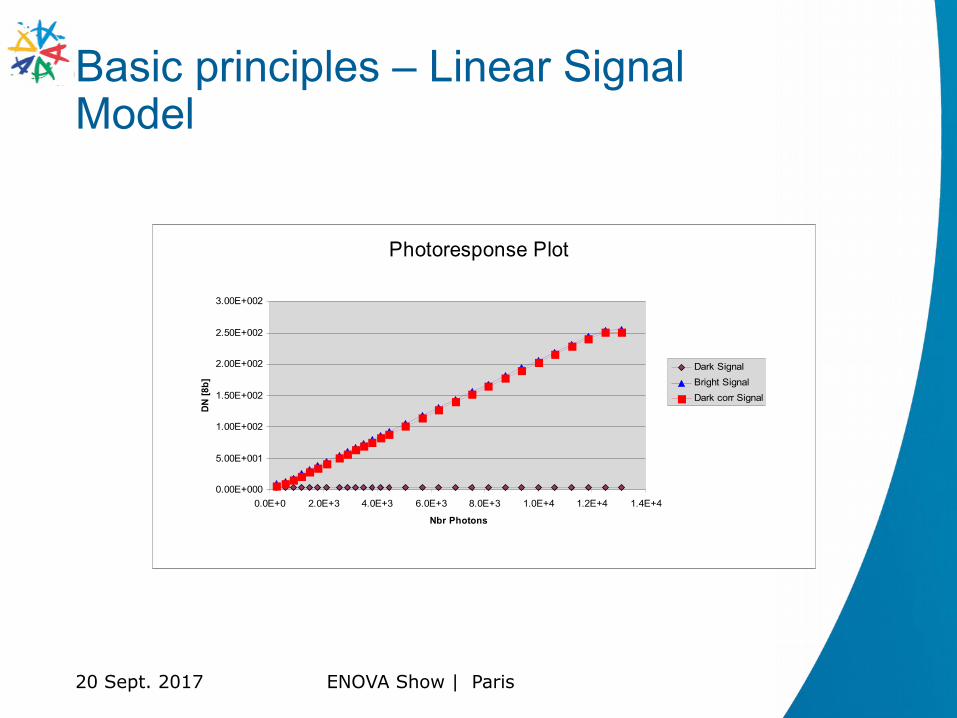
Basic principles – Linear Signal Model
20 Sept. 2017 ENOVA Show | Paris
● Linear Signal Model
● Analyzed by the photoresponse plot
● A linear fit through the non-saturated (< max variance) data points gives and
y= y , darkK AhcEtexp
y= f E t exp
y , darkK
Ahc
Basic principles – Linear Signal Model
20 Sept. 2017 ENOVA Show | Paris
Photoresponse Plot
0.00E+000
5.00E+001
1.00E+002
1.50E+002
2.00E+002
2.50E+002
3.00E+002
0.0E+0 2.0E+3 4.0E+3 6.0E+3 8.0E+3 1.0E+4 1.2E+4 1.4E+4
Nbr Photons
DN
[8b
]
Dark Signal
Bright Signal
Dark corr Signal

Basic principles – Photon transfer method
20 Sept. 2017 ENOVA Show | Paris
● Photon transfer method
● Analyzed by the photon transfer plot
● A linear fit through the non-saturated data points gives and
y2=K2d
2q2K y− y ,dark
y2= f y− y , dark
K K 2 d2 q
2

Basic principles – Photon transfer method
20 Sept. 2017 ENOVA Show | Paris
Photon Transfer Plot
-1
0
1
2
3
4
5
6
0.0E+0 5.0E+1 1.0E+2 1.5E+2 2.0E+2 2.5E+2 3.0E+2
Dark corr Signal [DN]
Var
ain
ce [
DN
² /
8bit
]
Dark corr Variance
Linear Fit

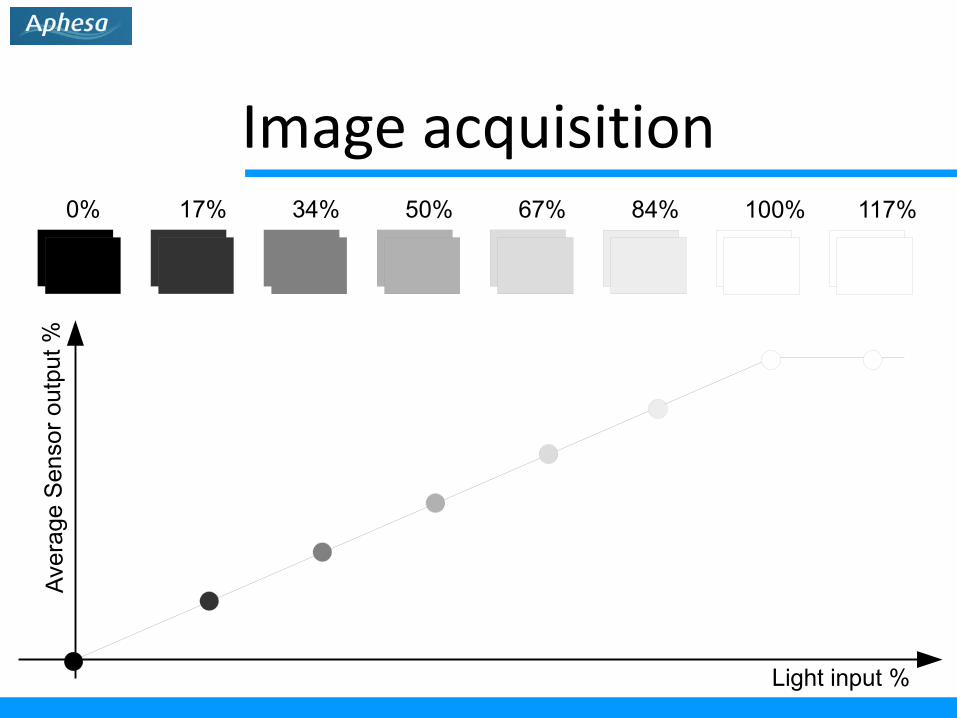
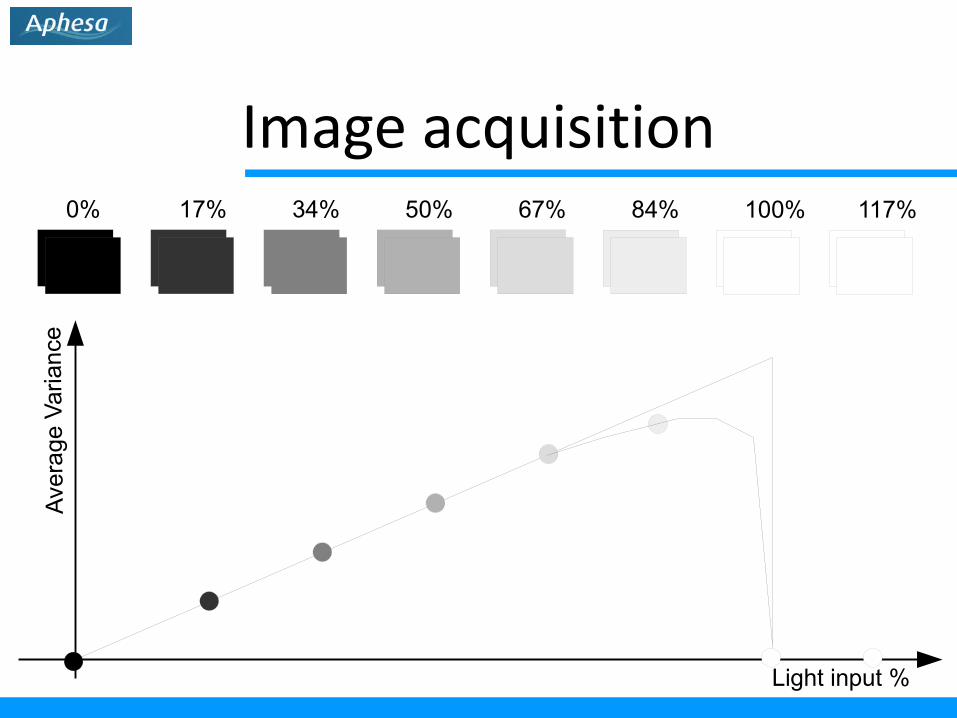
Basic principles – image acquisition
● Two images for each exposure
● Large number of images at 0% and 50% exposure (reason will be explained later)
20 Sept. 2017 ENOVA Show | Paris
www.aphesa.com
Image acquisition0% 17% 34% 50% 67% 84% 100% 117%
Ave
rage
Sen
sor
outp
ut %
Light input %

www.aphesa.com
Image acquisition0% 17% 34% 50% 67% 84% 100% 117%
Ave
rage
Sen
sor
outp
ut %
Light input %

www.aphesa.com
Image acquisition0% 17% 34% 50% 67% 84% 100% 117%
Ave
rage
Var
ianc
e
Light input %
www.aphesa.com
Image acquisition0% 17% 34% 50% 67% 84% 100% 117%
Ave
rage
Var
ianc
e
Light input %

www.aphesa.com
Image acquisition0% 17% 34% 50% 67% 84% 100% 117%
...
L+2 images
...
L+2 images

Basic principles – SNR
20 Sept. 2017 ENOVA Show | Paris
● Signal-to-Noise ratio
SNR p= p
d2
q2
K2 p
SNRideal p= p

Basic principles – SNR
20 Sept. 2017 ENOVA Show | Paris
log2 SNR [bit]
51 10 151
5
log2 µp.min log2 µp.sat
log2 µp [bit]
log2 SNRmax
slope = 0gain noisedominated

Basic principles – Non-uniformities
● Spatial variance → overall measure of spatial non-uniformity --> DSNU & PRNU
● Spectrograms → patterns of periodic signal variations
● Defect pixels
20 Sept. 2017 ENOVA Show | Paris

Basic principles – Total noise SNR
20 Sept. 2017 ENOVA Show | Paris
SNR p= p
d2DSNU 1288
2
q2
K2 pPRNU 1288
22 p2

Basic principles – Other parameters
● Sensitivity
● Dynamic Range
● Dark current
● Dark current doubling temperature
● Linearity
● Spectral response
● (Response delay)
● (Shutter efficiency)
● (RTN)
20 Sept. 2017 ENOVA Show | Paris
Basic principles – Monochronatic light source
● Uniform monochromatic light source
● F/8
● Many aspects of its implementation are left to the user
● Several intensity variation methods possible
20 Sept. 2017 ENOVA Show | Paris

Basic principles – Monochronatic light source
20 Sept. 2017 ENOVA Show | Paris

Monochromatic Light Source


Basic principles – Monochronatic light source
20 Sept. 2017 ENOVA Show | Paris
Basic principles – Monochronatic light source
● Properties
– At most 3% uniformity error within the sensor's area
– FWHM of at most 50nm– Stable of time– Calibrated within 3 to 5% for absolute irradiance at
least every second year.
20 Sept. 2017 ENOVA Show | Paris
Template datasheet
● Standard format for all sensors and cameras
● Summary datasheet followed by detailed plots
● Mandatory
● Must be used in conjunction with the EMVA1288 logo
● Must be made available to the public for any sensor or camera that complies with the EMVA1288 standard and uses the logo
20 Sept. 2017 ENOVA Show | Paris

Template datasheet
● Page 1
– Camera/sensor information– Operating point information– Spectral response plot
20 Sept. 2017 ENOVA Show | Paris

Template datasheet
● Page 2
– Operating point information– Photon transfer plot– SNR plot– Table (on the right) with all
mandatory numeric results● Pages 3 to 9 : all measured and
calculated plots
20 Sept. 2017 ENOVA Show | Paris
www.aphesa.com
Selecting an Image Sensor or a CameraStart with simple application requirements
– Irradiance from Brightest and Darkest points of the scene– Linearity requirements– Is image processing available for sensor corrections– SNR requirements– Wavelength of illumination / Spectrum of the scene
www.aphesa.com
Selecting an Image Sensor or a Camera
– Maximum acceptable exposure time– Resolution– Operating temperature

www.aphesa.com
Selecting an Image Sensor or a Camera
Irradiance from darkest point– Dark noise SNR=1 point (or SNR=3 or 5 etc)→
Irradiance from brightest point– Saturation capacity– Dynamic range
Linearity– Linearity error

www.aphesa.com
Selecting an Image Sensor or a Camera
Operating temperature– Dark current at room temperature– Dark current doubling temperature

www.aphesa.com
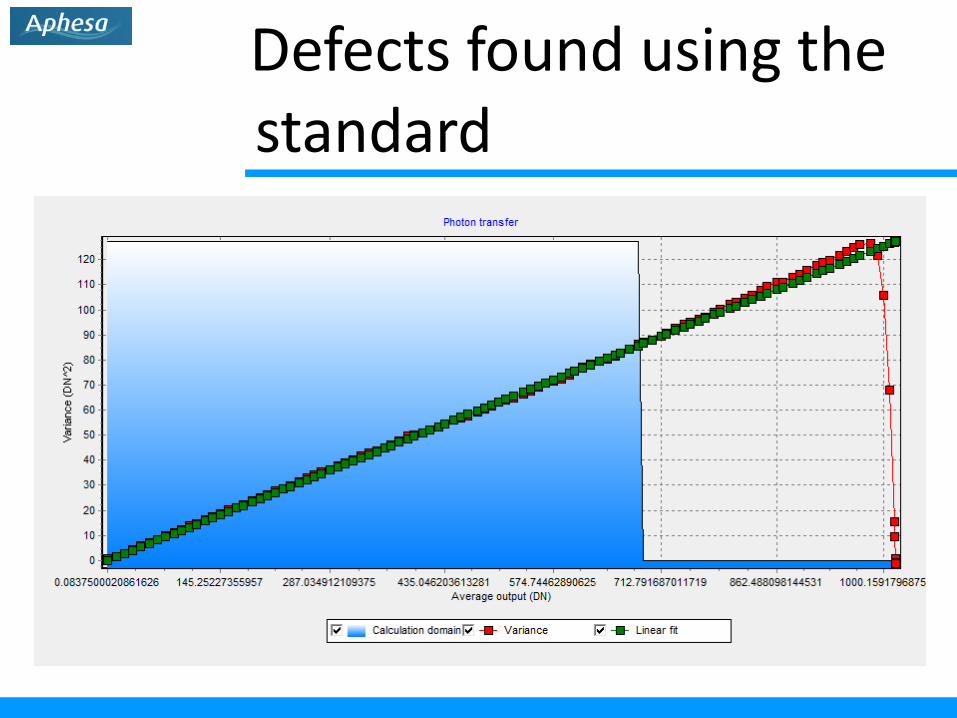
Defects found using the standard
Reminder: basic principle = model ideal behavior, make measurement, extract paremeters.
What happens if the data does not follow the model– Some measurements may be incorrect– More important: the device being tested is far from ideal
• On-purpose check datasheet→• Design errors and defects design validation for the →
sensor/camera design company.
www.aphesa.com
Defects found using the standard

www.aphesa.com
Defects found using the standard

Conclusions
● Users: always request EMVA1288 data from your suppliers
● Suppliers: be ready to provide EMVA1288 data to your customers
● Save evaluation and comparison time with the EMVA1288 standard
20 Sept. 2017 ENOVA Show | Paris

THANK YOU
Questions?