hoverboard design possibilities
TRANSCRIPT
FROM THE DESK OF BRANDON LARSON
So you want to build a hoverboard?
*This document was originally created in late 2012 and updated in late 2015
FROM THE DESK OF BRANDON LARSON
Overview A QUICK LOOK AT WHAT’S OUT THERE…
• THE BACK TO THE FUTURE BOARD (BTTF) IS THE DREAM
• AIR? MAGLEV? QUANTUM LOCKING? JETS?
FROM THE DESK OF BRANDON LARSON
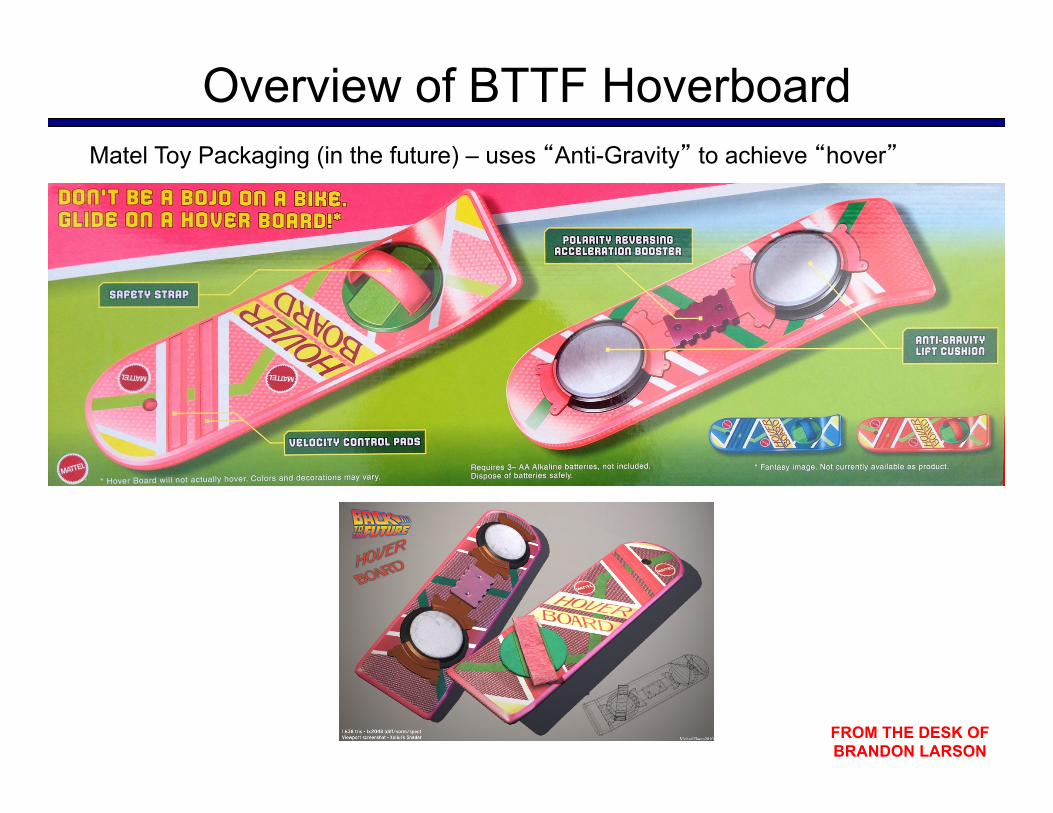
Overview of BTTF Hoverboard Matel Toy Packaging (in the future) – uses “Anti-Gravity” to achieve “hover”
FROM THE DESK OF BRANDON LARSON
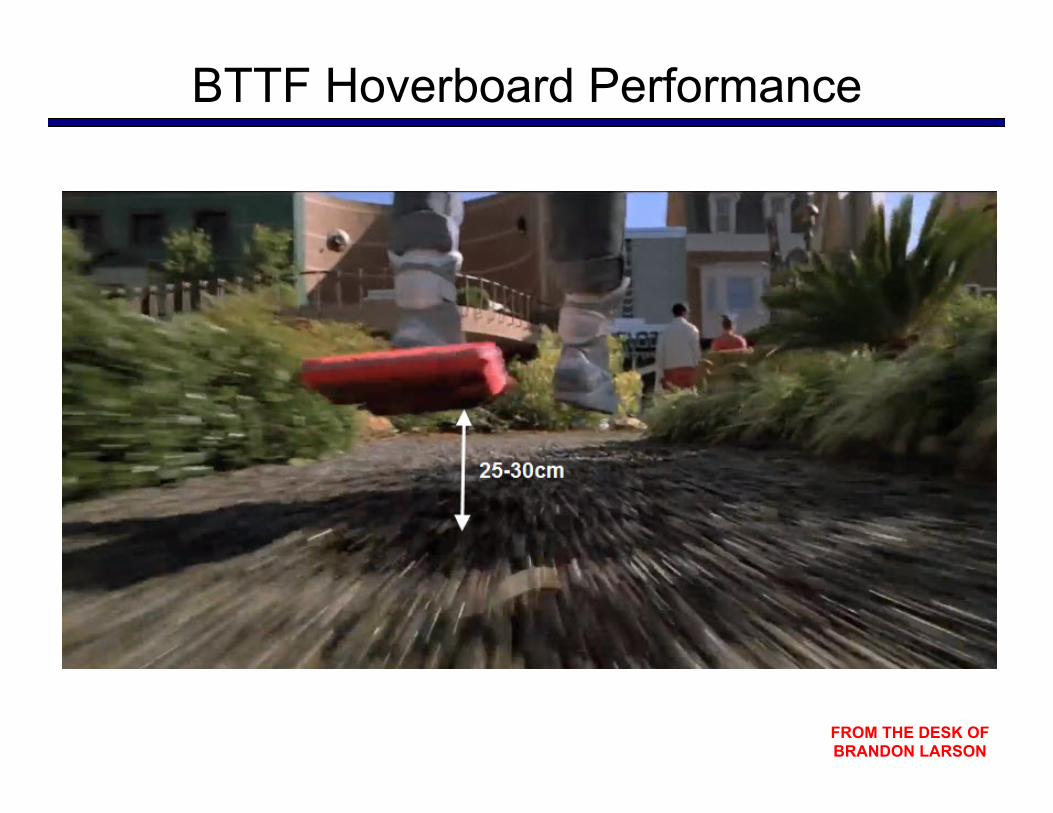
BTTF Hoverboard Performance
FROM THE DESK OF BRANDON LARSON
BTTF Hoverboard Performance
FROM THE DESK OF BRANDON LARSON
BTTF Hoverboard Performance
FROM THE DESK OF BRANDON LARSON
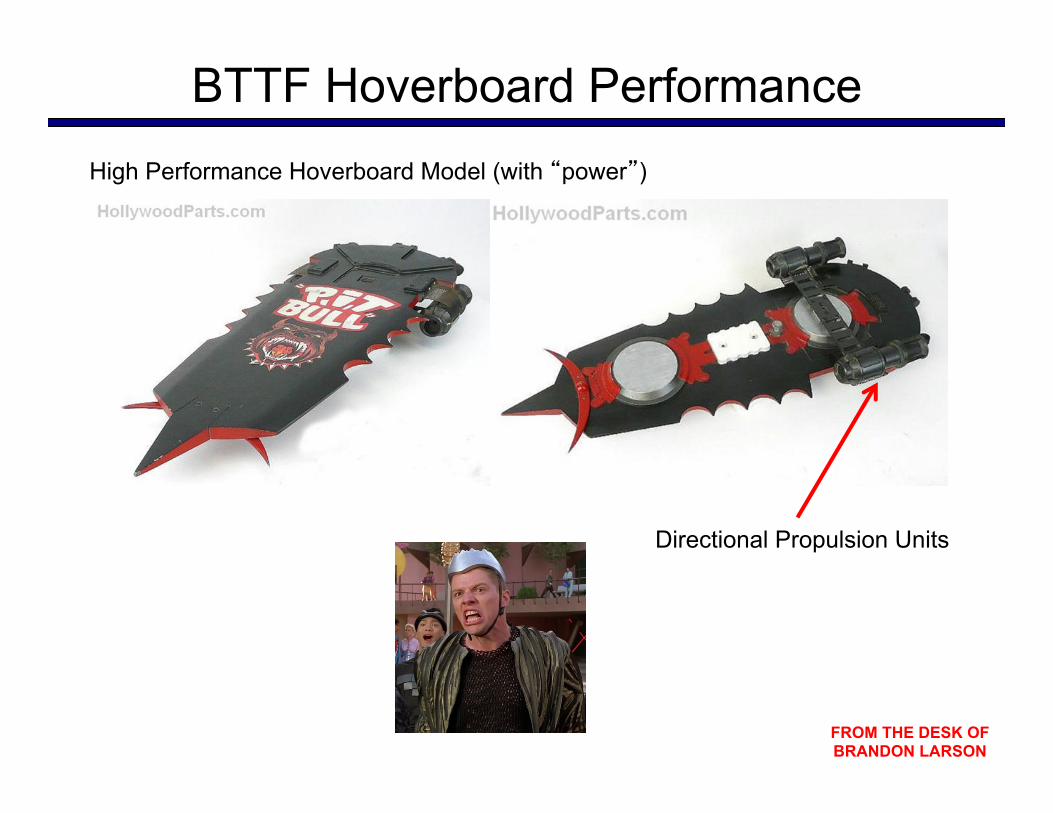
BTTF Hoverboard Performance
Directional Propulsion Units
High Performance Hoverboard Model (with “power”)
FROM THE DESK OF BRANDON LARSON
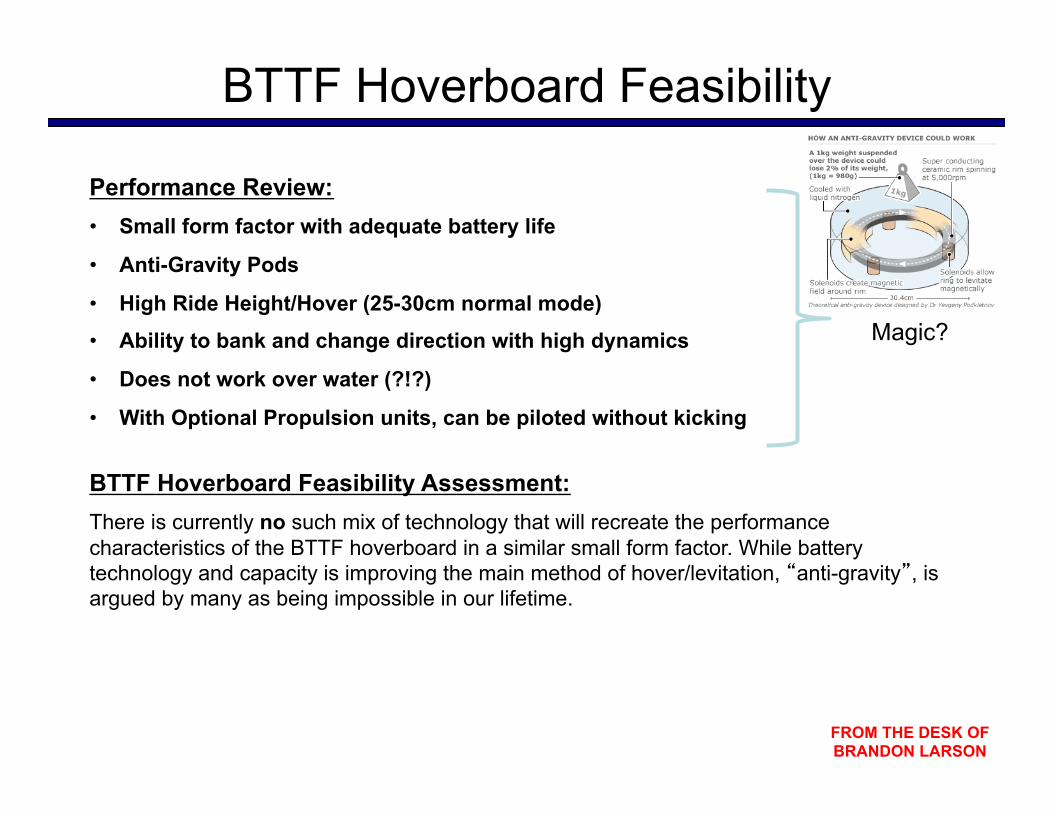
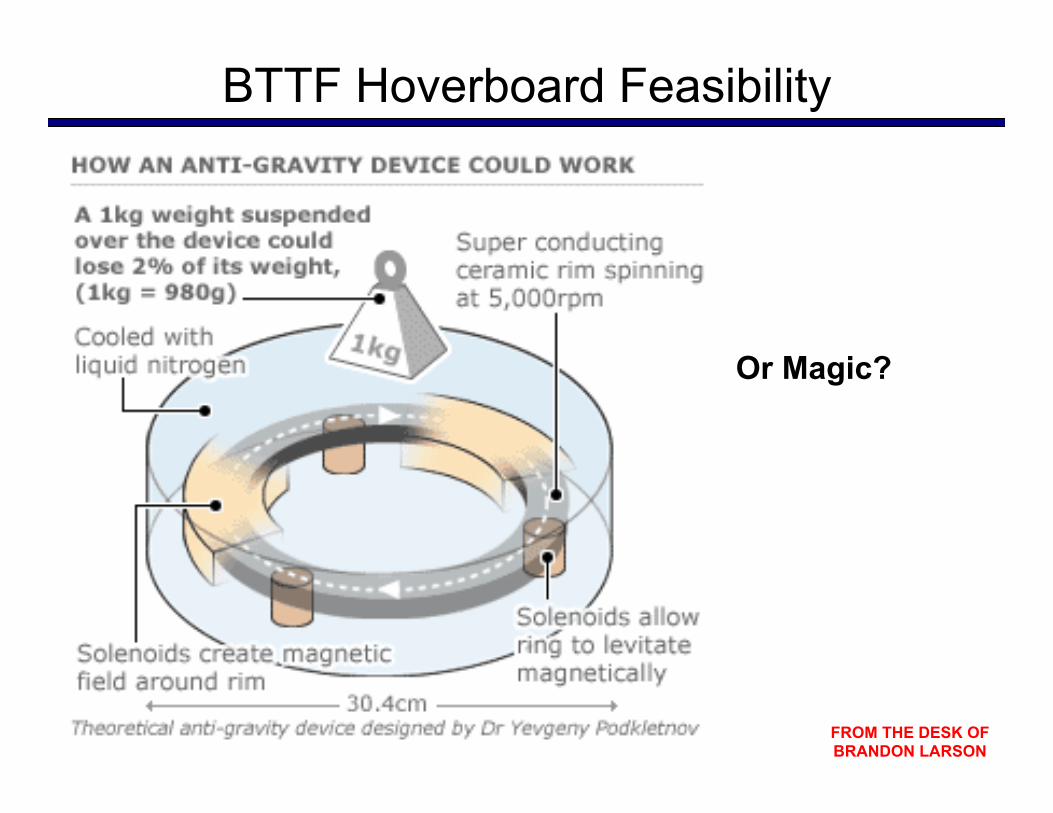
BTTF Hoverboard Feasibility
Performance Review: • Small form factor with adequate battery life
• Anti-Gravity Pods
• High Ride Height/Hover (25-30cm normal mode)
• Ability to bank and change direction with high dynamics
• Does not work over water (?!?)
• With Optional Propulsion units, can be piloted without kicking
BTTF Hoverboard Feasibility Assessment: There is currently no such mix of technology that will recreate the performance characteristics of the BTTF hoverboard in a similar small form factor. While battery technology and capacity is improving the main method of hover/levitation, “anti-gravity”, is argued by many as being impossible in our lifetime.
Magic?
FROM THE DESK OF BRANDON LARSON
BTTF Hoverboard Feasibility
Or Magic?
FROM THE DESK OF BRANDON LARSON
really
Re-Framing the Problem
What does it mean to hover?
to produce, while maintaining a small form factor, a net positve force (thrust) under the feet of a rider such that they may translate their position in space (air above ground)
through rider input
board
FROM THE DESK OF BRANDON LARSON
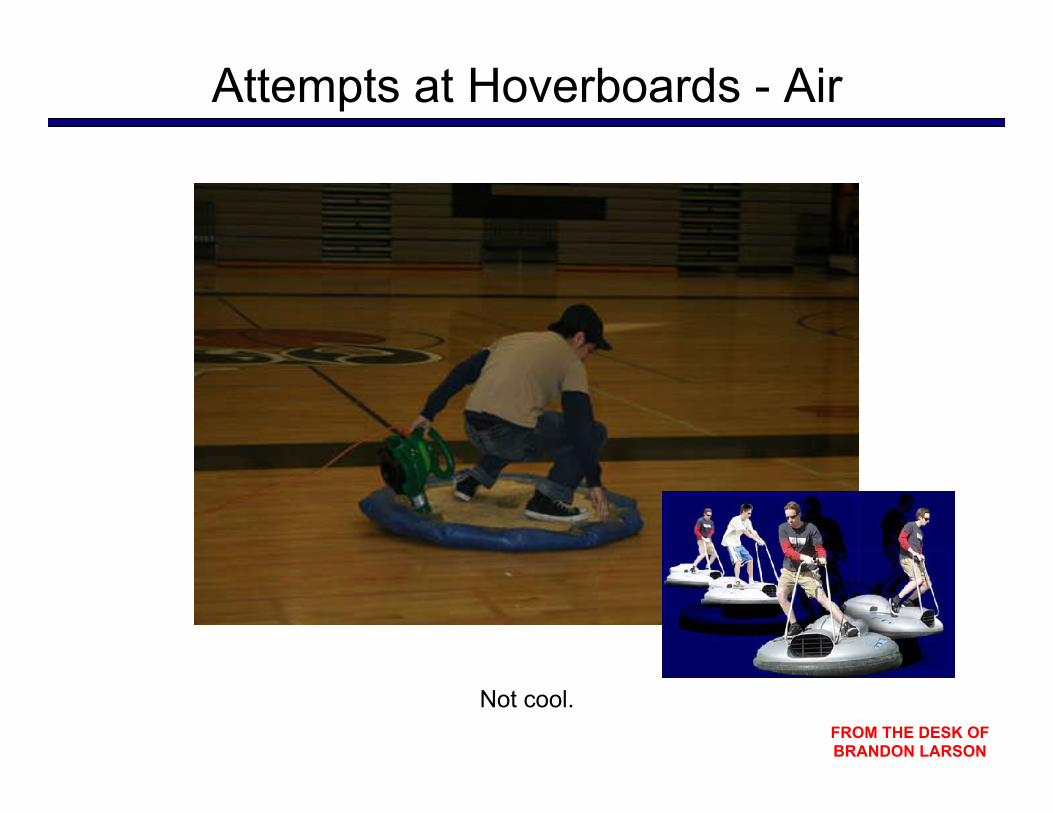
Attempts at Hoverboards - Air
Not cool.
FROM THE DESK OF BRANDON LARSON
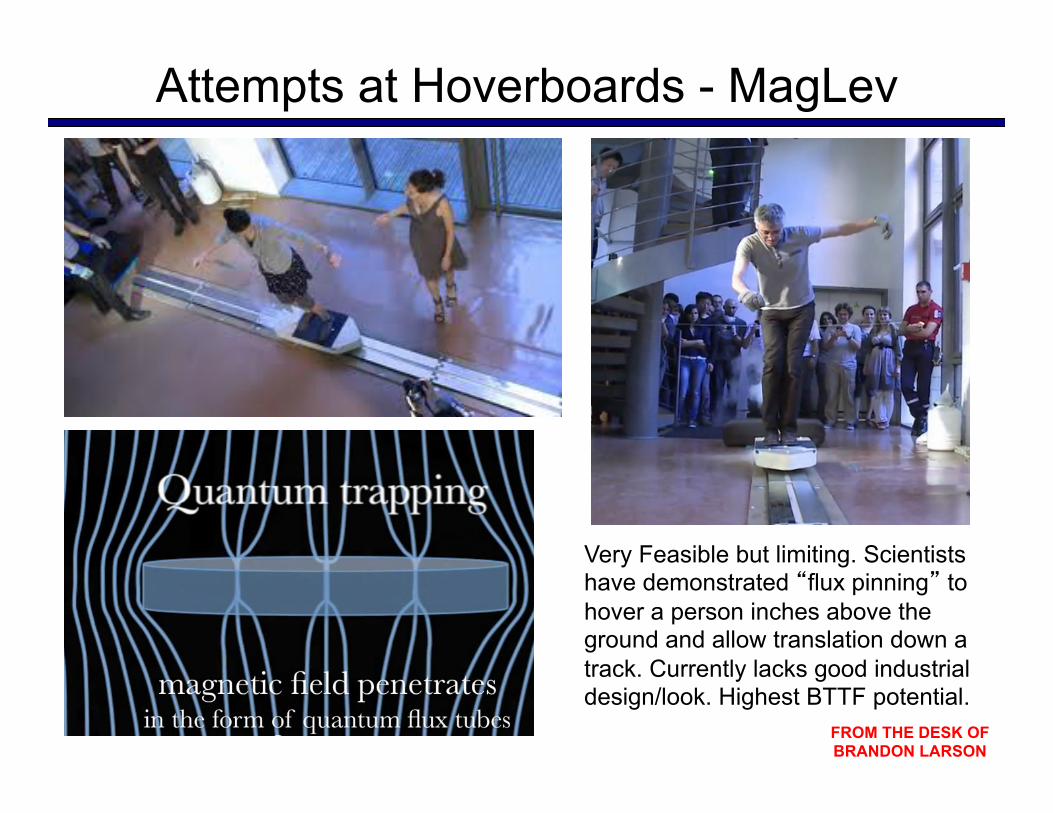
Attempts at Hoverboards - MagLev
Very Feasible but limiting. Scientists have demonstrated “flux pinning” to hover a person inches above the ground and allow translation down a track. Currently lacks good industrial design/look. Highest BTTF potential.
FROM THE DESK OF BRANDON LARSON
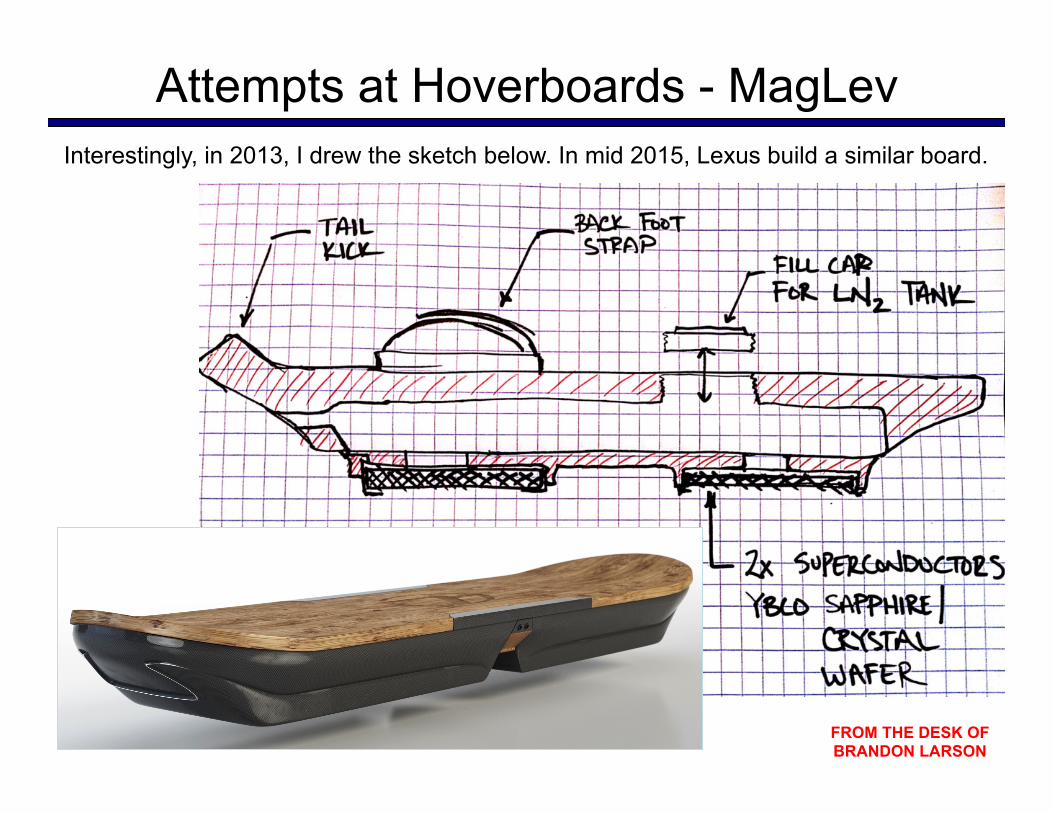
Attempts at Hoverboards - MagLev Interestingly, in 2013, I drew the sketch below. In mid 2015, Lexus build a similar board.
FROM THE DESK OF BRANDON LARSON
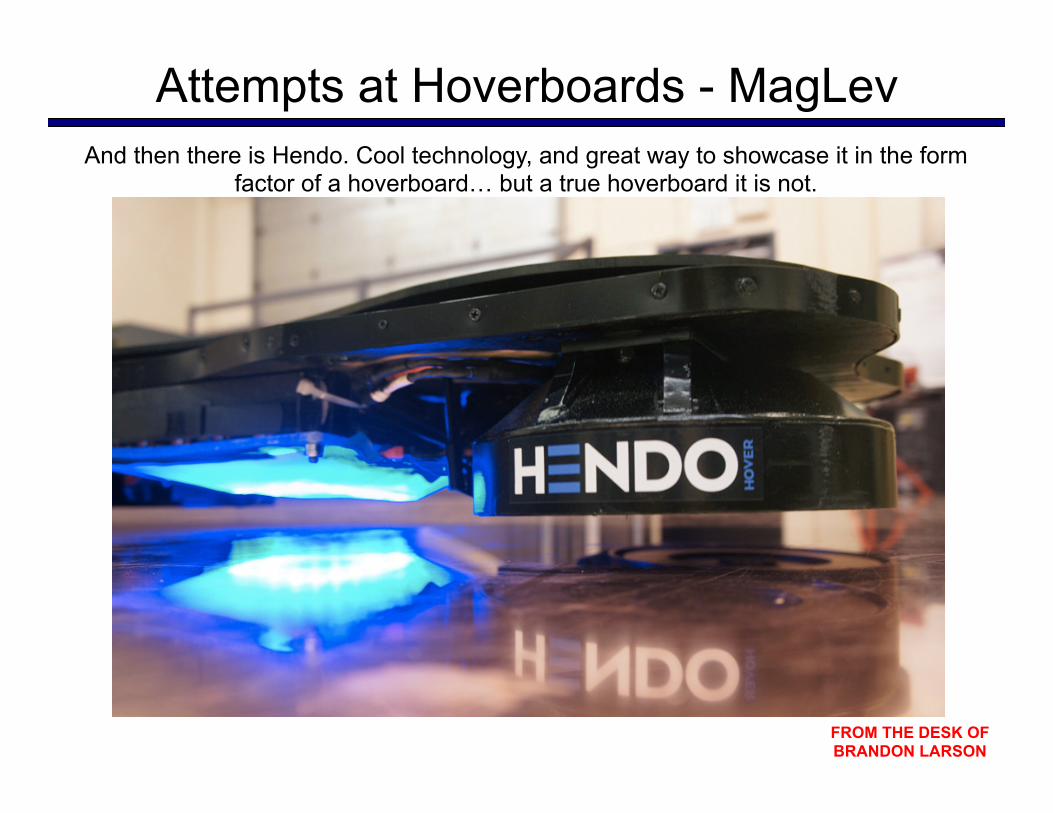
Attempts at Hoverboards - MagLev And then there is Hendo. Cool technology, and great way to showcase it in the form
factor of a hoverboard… but a true hoverboard it is not.
FROM THE DESK OF BRANDON LARSON
Attempts at Hoverboards - Rotor
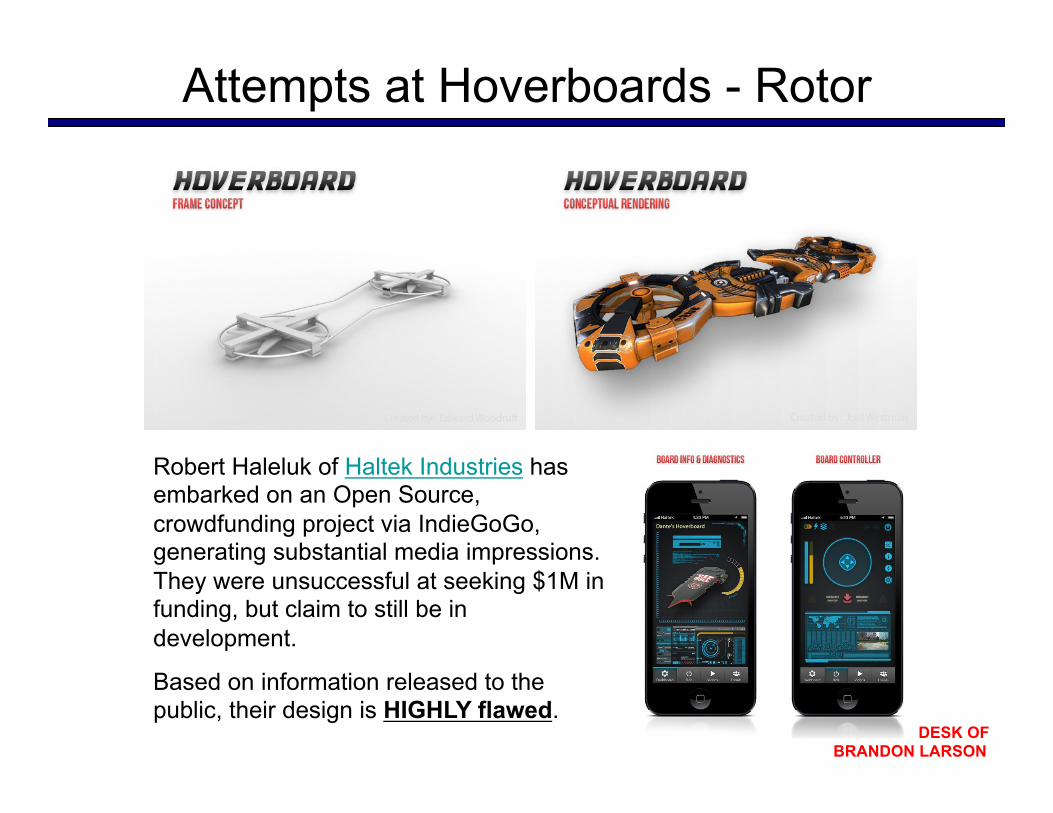
Robert Haleluk of Haltek Industries has embarked on an Open Source, crowdfunding project via IndieGoGo, generating substantial media impressions. They were unsuccessful at seeking $1M in funding, but claim to still be in development.
Based on information released to the public, their design is HIGHLY flawed.
FROM THE DESK OF BRANDON LARSON
Attempts at Hoverboards - Rotor
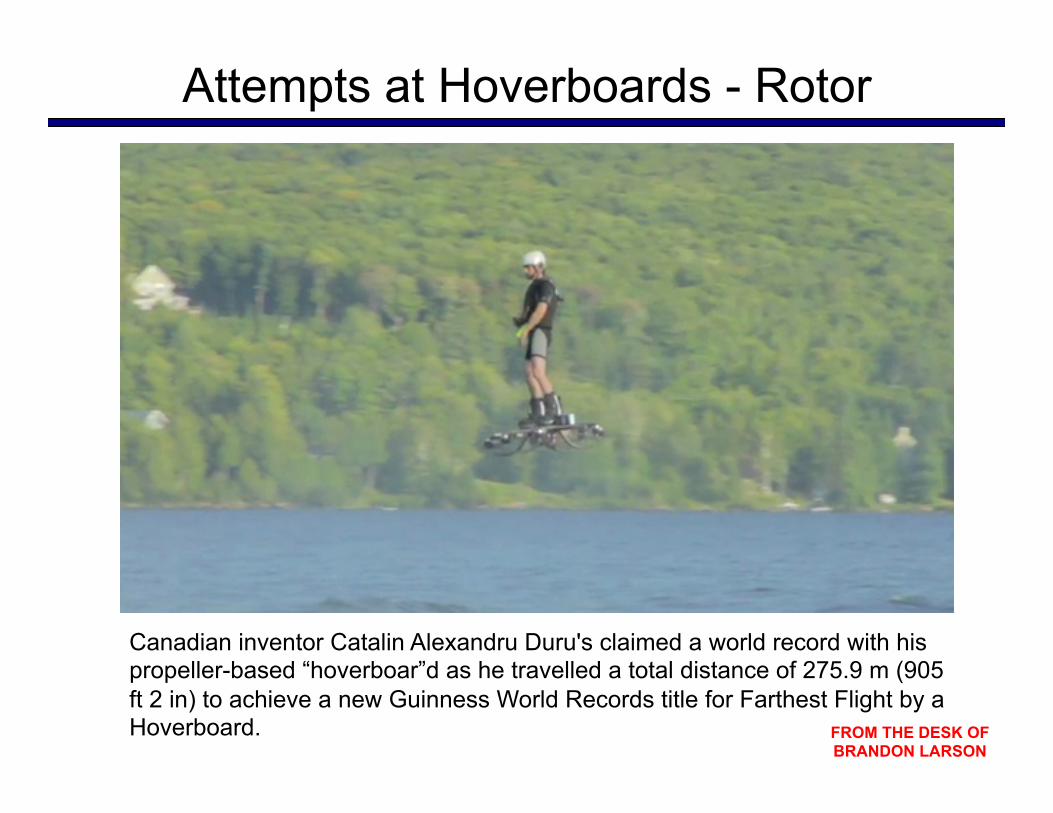
Canadian inventor Catalin Alexandru Duru's claimed a world record with his propeller-based “hoverboar”d as he travelled a total distance of 275.9 m (905 ft 2 in) to achieve a new Guinness World Records title for Farthest Flight by a Hoverboard.
FROM THE DESK OF BRANDON LARSON
Alternative Hoverboard Concept - Jet
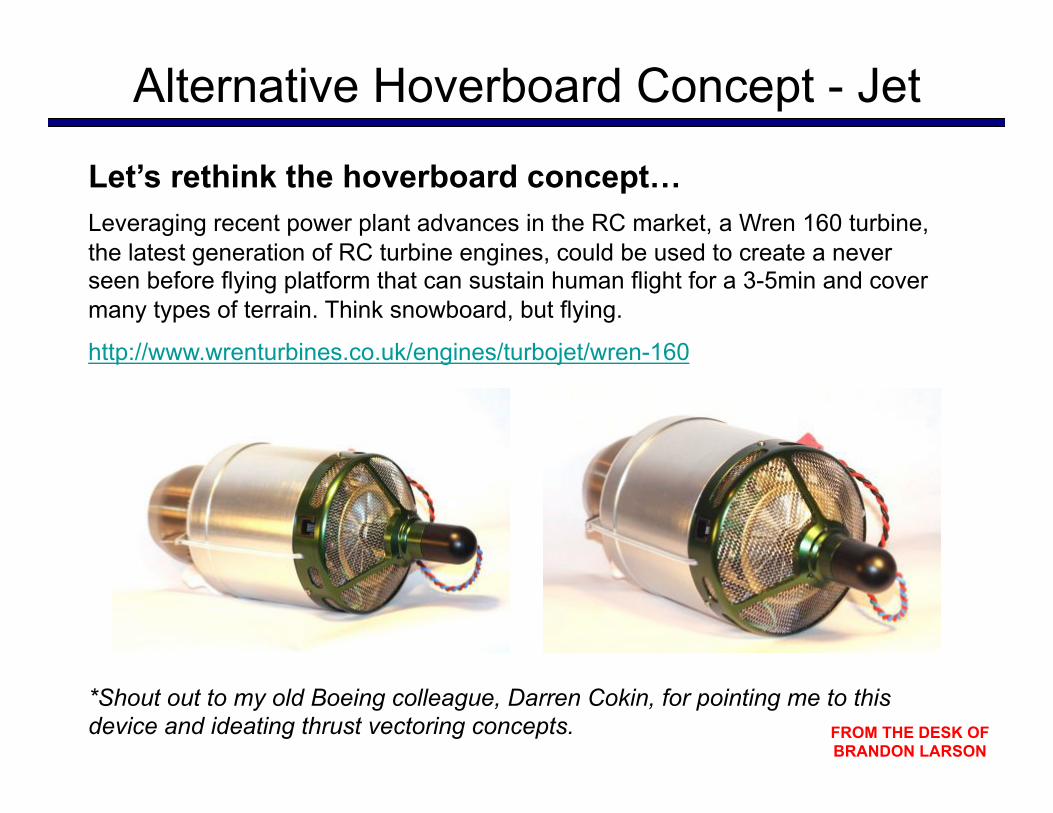
Let’s rethink the hoverboard concept… Leveraging recent power plant advances in the RC market, a Wren 160 turbine, the latest generation of RC turbine engines, could be used to create a never seen before flying platform that can sustain human flight for a 3-5min and cover many types of terrain. Think snowboard, but flying.
http://www.wrenturbines.co.uk/engines/turbojet/wren-160
*Shout out to my old Boeing colleague, Darren Cokin, for pointing me to this device and ideating thrust vectoring concepts.

FROM THE DESK OF BRANDON LARSON
Alternative Hoverboard Concept - Jet
New possibilities with EDF tech
42lbs Thrust Kerosene Jet
54lbs Thrust Electric Ducted Fan
FROM THE DESK OF BRANDON LARSON
Baseline: Wren 160 K Pro turbine (update to EDF tech) Specs: 4 lbs each, 4.4" in diameter, and put out 35 lbs of thrust, consuming 550 ml of fuel (about a pound) a minute. $3,500 each. Idea: Purchase 10 for $35k, equates to 350 lbs of thrust, and 40 lbs of weight. Design two pods ~1 foot in diameter with 5 engines each (placed at the tail and nose of “snowboard”). Assume 200 lbs for the pilot and safety gear, 50 lbs of fuel (backpack or in the board), 40 lbs for the engines, and 20 lbs for the structure and controls - totaling 310lbs – there is a positive thrust to weight ratio even with one engine out. The 50 lbs of fuel (approx 6 gallons) should have at least 5 minutes of flight time. 1500ft max height. Challenges: Flight control software to monitor thrust and divert thrust such that the board is safely controllable by user input. The control system is the difficult, not impossible, task.
Alternative Hoverboard Concept - Jet
FROM THE DESK OF BRANDON LARSON
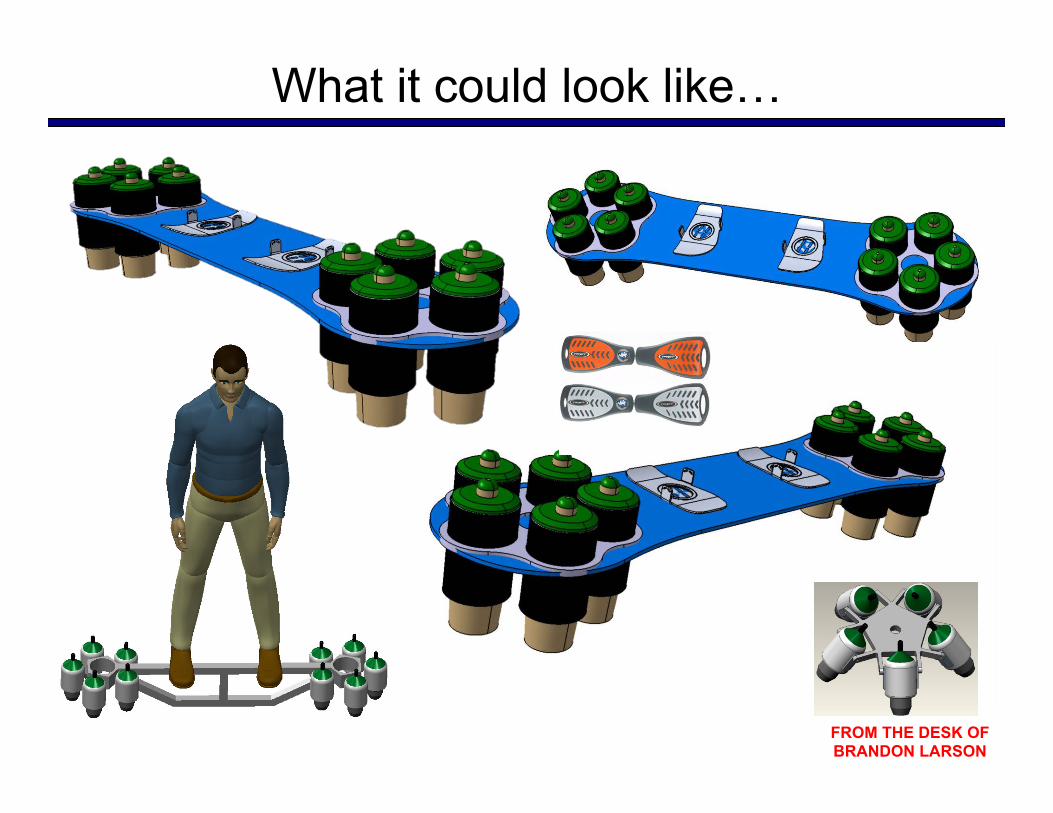
What it could look like…
FROM THE DESK OF BRANDON LARSON
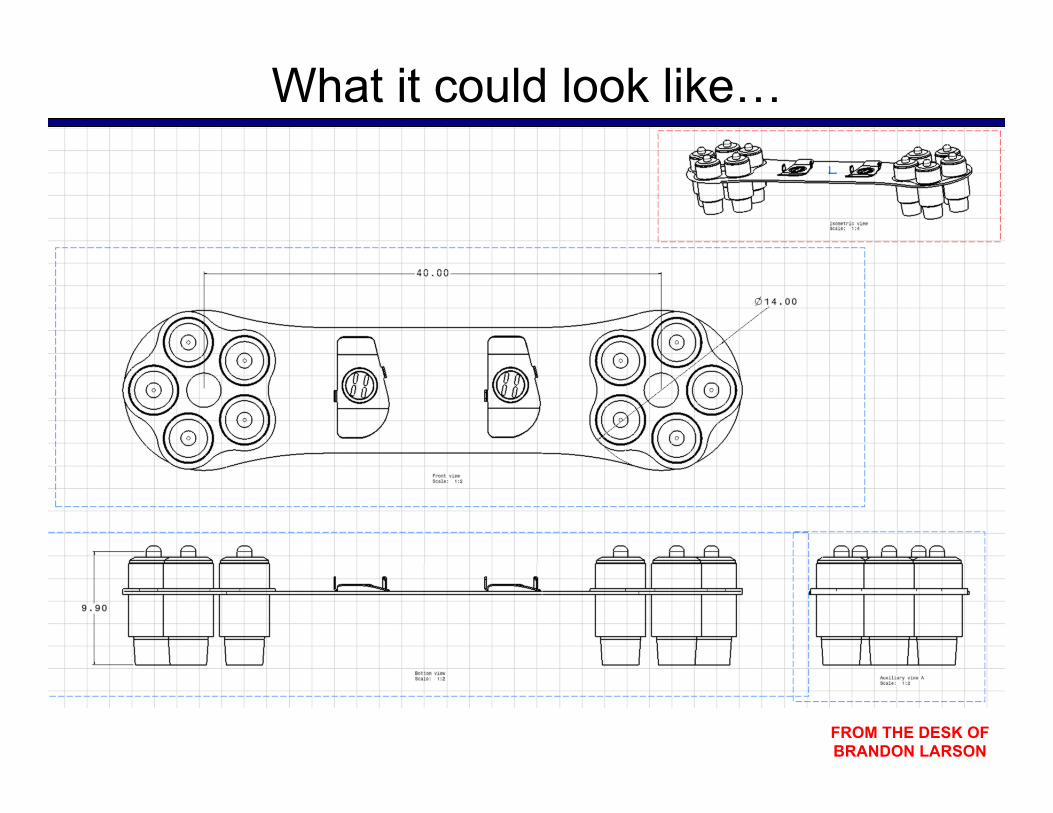
What it could look like…

FROM THE DESK OF BRANDON LARSON
What it could look like…
54lbs Thrust Electric Ducted Fan
FROM THE DESK OF BRANDON LARSON
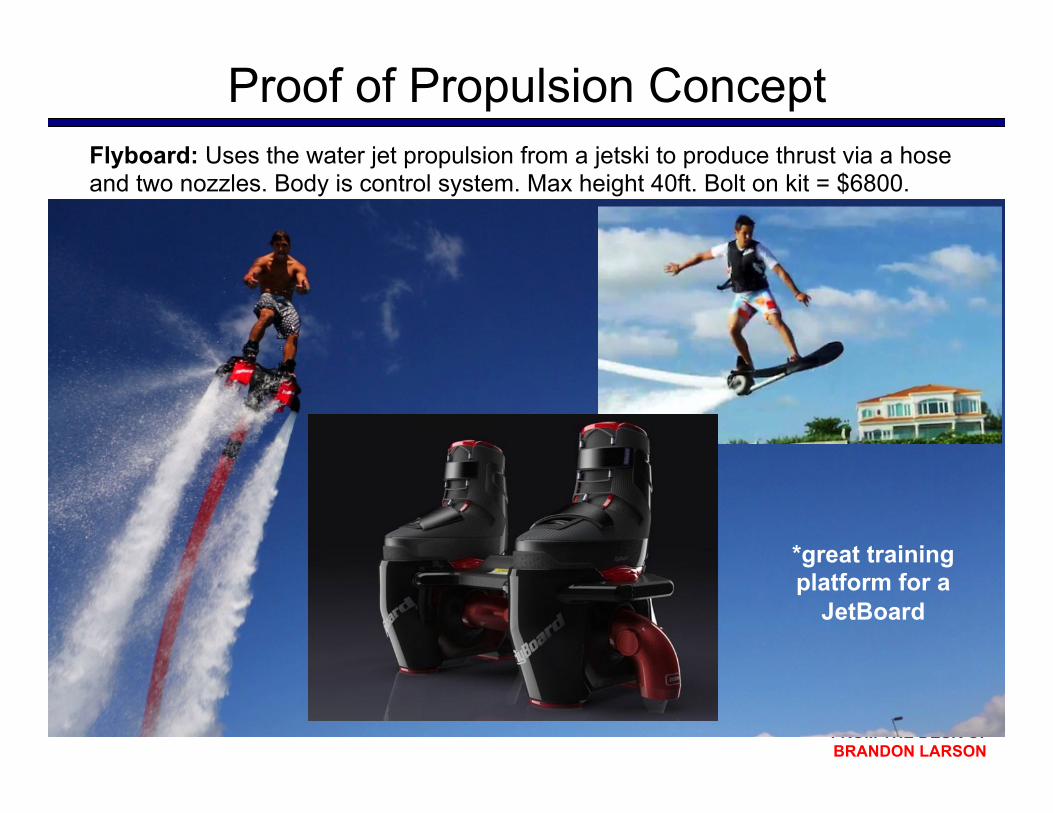
Proof of Propulsion Concept Flyboard: Uses the water jet propulsion from a jetski to produce thrust via a hose and two nozzles. Body is control system. Max height 40ft. Bolt on kit = $6800.
*great training platform for a
JetBoard
FROM THE DESK OF BRANDON LARSON
What it could lead to…
FROM THE DESK OF BRANDON LARSON
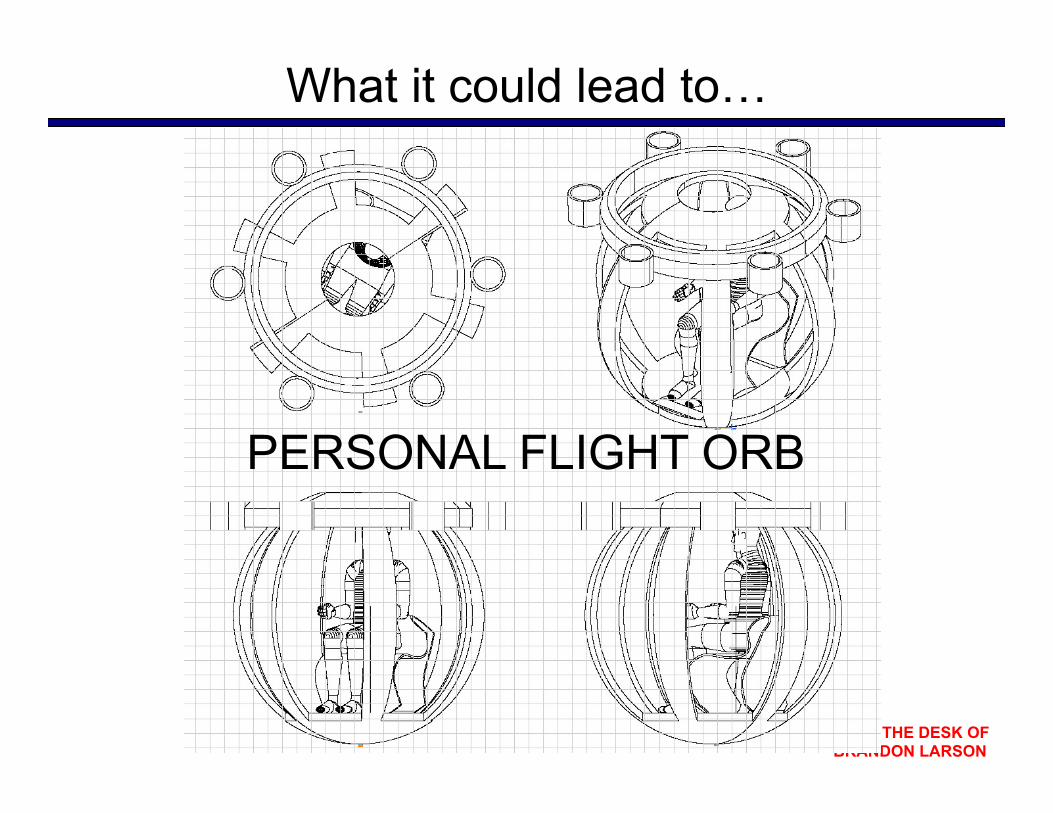
What it could lead to…
PERSONAL FLIGHT ORB
FROM THE DESK OF BRANDON LARSON
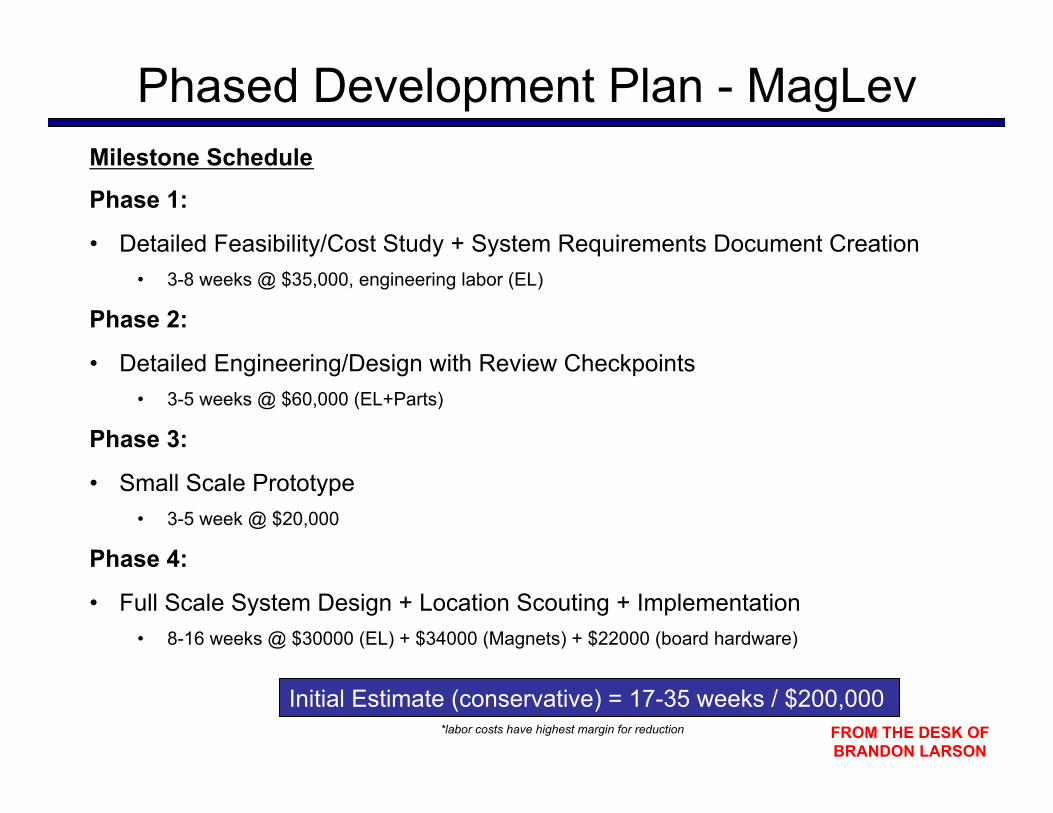
Phased Development Plan - MagLev Milestone Schedule
Phase 1:
• Detailed Feasibility/Cost Study + System Requirements Document Creation • 3-8 weeks @ $35,000, engineering labor (EL)
Phase 2:
• Detailed Engineering/Design with Review Checkpoints • 3-5 weeks @ $60,000 (EL+Parts)
Phase 3:
• Small Scale Prototype • 3-5 week @ $20,000
Phase 4:
• Full Scale System Design + Location Scouting + Implementation • 8-16 weeks @ $30000 (EL) + $34000 (Magnets) + $22000 (board hardware)
Initial Estimate (conservative) = 17-35 weeks / $200,000 *labor costs have highest margin for reduction
FROM THE DESK OF BRANDON LARSON
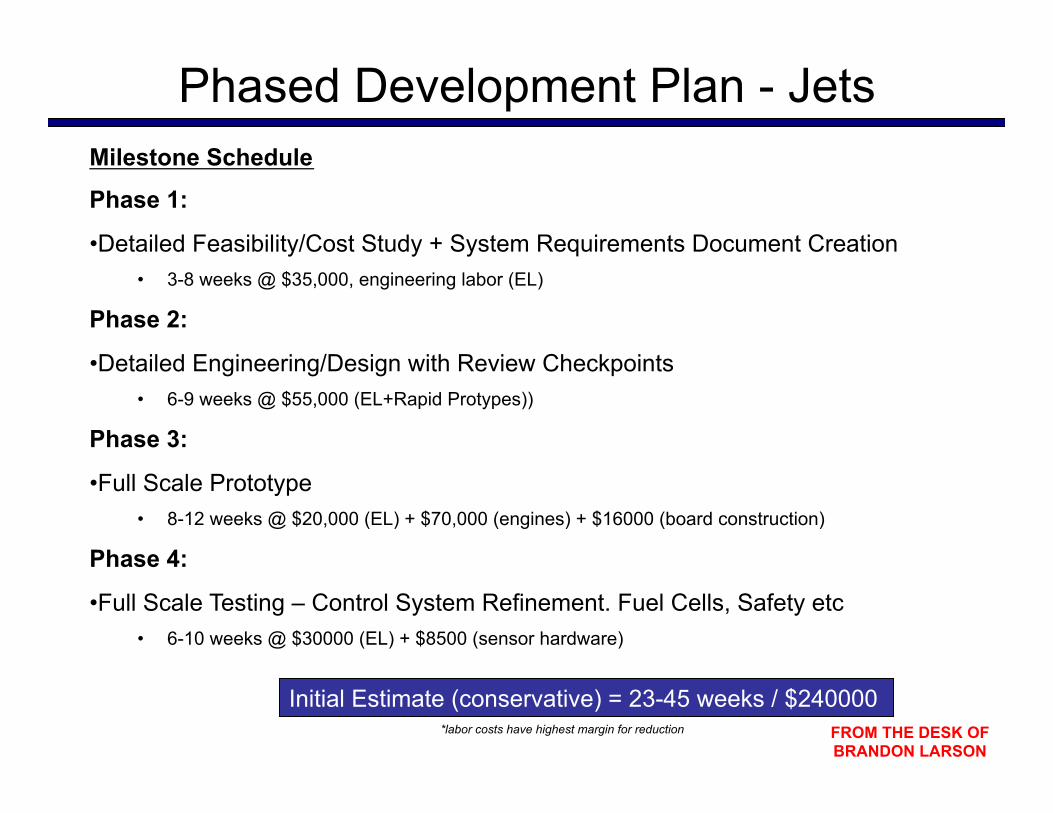
Phased Development Plan - Jets Milestone Schedule
Phase 1:
• Detailed Feasibility/Cost Study + System Requirements Document Creation • 3-8 weeks @ $35,000, engineering labor (EL)
Phase 2:
• Detailed Engineering/Design with Review Checkpoints • 6-9 weeks @ $55,000 (EL+Rapid Protypes))
Phase 3:
• Full Scale Prototype • 8-12 weeks @ $20,000 (EL) + $70,000 (engines) + $16000 (board construction)
Phase 4:
• Full Scale Testing – Control System Refinement. Fuel Cells, Safety etc • 6-10 weeks @ $30000 (EL) + $8500 (sensor hardware)
Initial Estimate (conservative) = 23-45 weeks / $240000 *labor costs have highest margin for reduction
FROM THE DESK OF BRANDON LARSON