guy yona - taurel006/vic_thesis.pdf · a thesis submitted toward the degree of ... mppt maximum...
TRANSCRIPT

TEL AVIV UNIVERSITY The Iby and Aladar Fleischman Faculty of Engineering
The Zandman-Slaner School of Graduate Studies
VIRTUAL INFINITE CAPACITORS
A thesis submitted toward the degree of Master of Science in Electrical and Electronic Engineering
by
Guy Yona
January 2013

TEL AVIV UNIVERSITY The Iby and Aladar Fleischman Faculty of Engineering
The Zandman-Slaner School of Graduate Studies
VIRTUAL INFINITE CAPACITORS
A thesis submitted toward the degree of Master of Science in Electrical and Electronic Engineering
by
Guy Yona
This research was carried out in the School of Electrical Engineering under the supervision of Prof. George Weiss
January 2013

ii
I dedicate this thesis to my darling wife Olga, in
grateful thanks for her patience, support and
love. I also dedicate this thesis to my loved
grandfather Zvi Porat, who taught me the love of
knowledge.

iii
Acknowledgements
First and foremost, I had both the privilege and the pleasure of working with Prof.
George Weiss. George has an admirable combination of acute mind, kindness and
perseverance. The lessons I have learnt from him during the course of the last two years
grow far beyond academic skills and knowledge. George has become truly a mentor to
me.
I am gratefully thankful to my parents Alon and Dalia, and to my wife Olga, who
enabled me to pursue my studies, through not a minute personal cost to themselves,
without whom I could not have undertaken this project.
I wish to thank the staff of the Tel-Aviv University Faculty of Engineering, and
acknowledge the generous support of the Israel Strategic Alternative Energy Foundation,
San Francisco.

iv
Abstract
We define a virtual infinite capacitor (VIC) as a nonlinear capacitor that has the
property that for an interval of the charge Q, the voltage V remains constant. We propose
a lossless approximate realization for the VIC using switches, an inductor and two
capacitors. This circuit requires a complex control algorithm that we describe. The VIC
is useful as a filter capacitor for various applications, for example power factor
compensators (PFC), as we describe. In spite of using small capacitors, the VIC can
replace a very large capacitor in applications that do not require substantial energy
storage, such as power filtering. We give simulation results for a PFC working in critical
conduction mode with a VIC for output voltage filtering, with both circuits operating in
zero-voltage-switching conditions.

v
Contents
Symbols and Abbreviations ........................................................................................... vi
List of Figures ............................................................................................................... vii
1. Introduction ................................................................................................................. 1
2. The virtual infinite capacitor ....................................................................................... 5
2.1. Nonlinear capacitors ............................................................................................. 5
2.2. Definition of a virtual infinite capacitor ............................................................... 7
3. A proposed implementation of the VIC ...................................................................... 9
3.1. The canonical switching cell ................................................................................ 9
3.2. The proposed circuit ........................................................................................... 11
3.3. Controlling the charge in a VIC ......................................................................... 12
4. Control of the VIC .................................................................................................... 16
4.1. Sliding mode control .......................................................................................... 16
4.2. The control problem of a boost converter .......................................................... 19
4.3. The proposed control algorithm ......................................................................... 22
4.4. Parameter sensitivity of the VIC ........................................................................ 25
5. An application of the VIC in a PFC .......................................................................... 29
5.1. Power Factor Compensation .............................................................................. 29
5.2. The proposed circuit ........................................................................................... 30
5.3. Simulation results ............................................................................................... 34
5.4. An improvement – integral sliding mode control .............................................. 39
6. Zero-voltage-switching (ZVS) of a PFC and a VIC.................................................. 41
6.1. Overview of ZVS and motivation ...................................................................... 41
6.2. The proposed circuit ........................................................................................... 43
6.3. Simulation results of a ZVS PFC ....................................................................... 50
6.4. ZVS implementation of the VIC ........................................................................ 53
7. Conclusion................................................................................................................. 61
8. Bibliography .............................................................................................................. 63

vi
Symbols and Abbreviations
CRM Critical Conduction Mode
ESR Equivalent Series Resistance
FCCrM Frequency Clamped Critical conduction Mode
IGBT Insulated Gate Bipolar Transistor
ISM Integral Sliding Mode
LPF Low-Pass Filter
MOS Metal-Oxide-Semiconductor
MOSFET Metal-Oxide-Semiconductor Field Effect Transistor
MPPT Maximum Power Point Tracking
MRC Multi-Resonant Converter
ODE Ordinary Differential Equation
PF Power Factor
PFC Power Factor Compensation
PI Proportional-Integral (means of control)
PV Photovoltaic
PWM Pulse Width Modulation
QSC Quasi-Square wave Converter
QSM Quasi Sliding Mode
SMC Sliding Mode Control / Sliding Mode Controller
THD Total Harmonic Distortion
VIC Virtual Infinite Capacitor
VSS Variable Structure System
ZVS Zero-Voltage Switching

vii
List of Figures
1.1 Simplified structure of a switching AC/DC power supply 1
1.2 Life expectancy of electrolytic capacitors as a function of temperature 3
2.1 � − � characteristics of a virtual infinite capacitor 7
2.2 A typical application of the VIC 8
3.1 A canonical switching cell 9
3.2 Average model of a canonical switching cell 10
3.3 Current and voltage waveforms in the canonical switching cell 10
3.4 A realization of the VIC 11
3.5 A proposed charge controller for the VIC 14
4.1 An example double integrator system with variable feedback 16
4.2 Phase trajectories of the system from Figure 4.1 17
4.3 Sliding mode regime of the system from Figure 4.1 18
4.4 Average model of the VIC 20
4.5 Plot of duty cycle dynamics (4.5) showing the instability if the VIC 21
4.6 The average switching frequency of the VIC vs. the sampling frequency 26
4.7 The RMS error of the output voltage of the VIC vs. the sampling period 26
4.8 The RMS error of the output voltage of the VIC vs. the switching frequency 27
4.9 The RMS error of the output voltage of the VIC vs. the control parameter � 28
5.1 A PFC using a boost converter with a VIC as the output capacitor 31
5.2 The waveform of the inductor current in critical conduction mode 31
5.3 The PFC from Figure 5.1 with the average model of the boost converter 33
5.4 Simulation results for a PFC boost converter using a VIC 35
viii
5.5 Simulation results for the power-up phase of the PFC boost converter 36
5.6 Simulation results for an output power change from 250W to 500W 37
5.7 Simulation results for an output power change from 500W to 250W 38
5.8 Simulation results for a PFC using a VIC with an integral sliding function 40
6.1 Waveforms of the current and voltage in a non-ZVS boost converter 44
6.2 Zero-voltage-switching version of the boost converter in a PFC 45
6.3 Waveforms of the current and voltage in a ZVS boost converter 46
6.4 Simulation results for a ZVS boost converter PFC using a VIC 51
6.5 Simulation results for the power-up phase of the ZVS PFC using a VIC 52
6.6 Simulation results for an output power change in the ZVS PFC using a VIC 53
6.7 A realization of the VIC showing the parallel capacitance of the switches 54
6.8 Average model of the VIC operating in critical mode 55
6.9 Waveforms of the current and voltage in a VIC operating in critical mode 57
6.10 Simulation results for a PFC using a VIC operating in critical mode (in ZVS) 58
6.11 Bode plot of the dependence of the output voltage error in the noise in a VIC 59
6.12 Simulation results: PFC using a VIC with the integral critical mode controller 60
7.1 � − � characteristic of a virtual "big" capacitor 62

1
1. Introduction
Most power converters require input and output filters with capacitors for the
purpose of voltage smoothing, in particular switching noise suppression. Unfortunately,
covering the low frequency range requires a large capacitance, which has three major
disadvantages: (1) low reliability; (2) large size; (3) high cost. We shall demonstrate
those disadvantages in several common power converters.
As an important example, we look at the basic structure of a switching single
phase AC/DC power supply, shown in Figure 1.1. A rectified AC voltage is passed
through a capacitive low-pass filter, which holds the voltage at a fairly constant DC level
with a ripple determined by its capacitance. Often, regulation also requires power factor
compensation (PFC), which warrants an additional circuit before the filtering, see
Chapter 5. A highly regulated low voltage, typically in the order of 3-24V, is usually
required on the DC side, hence a DC/DC converter is used to step down the voltage. For
safety reasons and the high voltage ratio, an insulated DC/DC converter topology is
generally used (such as flyback, forward, push-pull, half and full bridge topologies [45]),
which incorporates a high frequency transformer. To allow a proper functioning of the
DC/DC converter, the ripple on its input voltage �� must be constrained. The filter
capacitor, with capacitance �, must supply the load between line peaks (at twice the grid
frequency, if a full bridge rectifier is used) and allow the voltage to drop to a minimum ���. If we do not use a PFC, then the capacitance needed is
� = �� ���� − ���� �, (1.1)
where � is the converter input power, � the grid frequency and ��� is the minimal peak
voltage of the grid [44].
Figure 1.1: Simplified structure of a switching AC/DC power supply. The
alternating grid voltage is first rectified, then filtered by a capacitor,
converted to the required voltage and filtered again at the output side. The
PFC stage is optional.
grid connection
DC/DC converter
PFC DC
connection ���

2
A practical rule of thumb is to choose the ripple on �� to be 25-30% of the
minimum peak grid voltage. Using (1.1), we find that a typical 500W power supply
would require a 300μF capacitor (the capacitance is proportional to the power of the
converter). Only electrolytic and film capacitors are suitable for rectified grid voltages
and have high enough capacitance, with the latter being 10-20 times more expensive than
the former, and limited to about 600μF. Either kind of capacitors is very large compared
to the other components in the power supply. For example, a typical 300μF/400V
electrolytic capacitor has a diameter of 30mm and a height of 40mm (for comparison, the
dimensions of a transformer intended for the same power supply are approximately
20mm x 13mm x 11mm). The large dimensions of the filter capacitor hinder the design
of flat, small form factor power supplies, which have many uses in displays, portable
PCs, LED lighting and other applications.
We move to another example. In the growing industry of photovoltaic (PV) energy
production, the lifetime of a PV system is determined mainly by the inverter, as the
lifetime of modern PV panels surpasses 20 years, vs. an average of 5 years for the
inverter [27]. PV module inverters face harsh environmental conditions, with
temperatures up to 70ºC combined with humid of corrosive conditions, which greatly
affect the lifetime of electronic components. Aluminum electrolytic capacitors, used to
filter out the current ripple on the DC-link, are known as one of the weakest links in PV
module inverters [34]. Unlike other capacitors, electrolytic capacitors have a life
expectancy after which their equivalent series resistance (ESR) rises significantly and
they are prone to failure. The life expectancy is exceptionally susceptible to ambient
temperature, as shown in Figure 1.2. In most commercial inverters, a several hundred μF
capacitor is needed to meet the ripple requirement, and the use of film capacitors is either
impractical or very costly. Finding a way to significantly reduce the capacitance while
maintaining the same ripple or less, will facilitate the use of smaller film (instead of
electrolytic) capacitors, and would help solving the life expectancy problem of PV
module inverters. An additional advantage of using film instead of electrolytic capacitors
is a considerably smaller ESR in the former.
Many applications require both reliable and small capacitors. One example is the
module-integrated PV inverter, which is an effective PV system topology for systems
located in built-up areas. Such PV systems are prone to shading and module mismatch
that reduce the power output of the system, therefore it is useful to place a maximum
power point tracking (MPPT) converter on each panel. Often, it is more economical to

3
include also an inverter with the MPPT on each panel. These inverters have the same
reliability problem described above, and need also to be compact in order to fit into the
PV module. Similar considerations also apply to certain power supplies, especially in
aerospace systems.
Figure 1.2: Life expectancy of aluminum electrolytic capacitors as a function
of temperature. The different lines represent the common qualification tests of
commercial capacitors, determining their grade (taken from [20]).
The need for high reliability, lightweight and small form factor power converters
is growing, as renewable energy sources, electric transportation and efficient DC lighting
become more widespread. Thus, we think that it would be useful to have a high
reliability circuit that can replace a large converter capacitor. The purpose of this thesis is
to propose such a circuit. We define a virtual infinite capacitor (VIC) as a nonlinear
capacitor that has the property that for an interval of the charge Q, the voltage V remains
constant. We shall explain how such a device is useful, and how to build and control one.
In spite of using small capacitors, the VIC can replace a very large capacitor in
applications that do not require substantial energy storage. The VIC is useful as a filter
capacitor for various applications, for example power factor compensators (PFC), as we
describe. The use of much smaller capacitors instead of electrolytic capacitors
contributes to higher reliability and smaller devices. Therefore, the VIC can replace the
input or output capacitors in various power converters, where there is a significant low
frequency current flowing through the capacitor. A typical application is after the PFC
stage in single phase power supply (see Figure 1.1).
�� (°C)

4
Organization
The theoretical concept of the VIC as a type of a nonlinear capacitor is introduced
in Chapter 2. In Chapter 3 we propose and discuss a possible implementation of the VIC
using a bidirectional DC/DC converter, and the need to control its charge. In Chapter 4
we discuss the problem of controlling the VIC, propose a sliding mode controller and
discuss its parameter sensitivity. Chapter 5 contains a proposed application of the VIC as
an output capacitor of the PFC stage in a single phase power supply, including
simulation results, and demonstrates the results of an improved control using a three
dimensional sliding surface. Chapter 6 deals with ways to significantly reduce the
switching losses of the discussed implementations using zero-voltage-switching (ZVS)
techniques in both the PFC boost converter and the VIC bidirectional converter. For this
purpose, we propose and discuss a critical mode controller for the VIC.

5
2. The virtual infinite capacitor
2.1. Nonlinear capacitors
The theory of networks built from static nonlinear circuit elements was largely
developed by Leon O. Chua [4]. There are four basic types of two-terminal circuit
elements, each corresponding to a relation between two independent variables:
1. Relationship between the voltage � and the current ": a resistor ;
2. Relationship between � and the charge �: a capacitor ;
3. Relationship between " and the magnetic flux Φ: an inductor ;
4. Relationship between � and Φ: a memristor [7].
A relationship does not necessarily mean a function. For example, in a hysteresis type
relation between " and Φ , as common in an inductor, Φ cannot be expressed as a
function of " (and vice verse). Often, a circuit element can be expressed by a continuous
and piecewise smooth curve in the correct plane, one of the following "-�, �-�, "-Φ or
the �-Φ plane. Then the element is characterized by that curve, and will belong to the
corresponding type.
When a capacitor is characterized by a straight line through the origin of the �-�
plane, it is called a linear capacitor. It can be described by � = �� where � is the slope
of the straight line, or the capacitance of the capacitor. If a capacitor is characterized by
any other curve in the �-� plane, then it is a nonlinear capacitor. Nonlinear capacitors
can be found in the early references Manley and Rowe [26] and Rowe [32]. The curve of
a nonlinear capacitor can be a function by � = �(�) if it is voltage-controlled, or it can
be a function � = �(�) if it is charge-controlled. Nonlinear capacitors occur extensively
in integrated circuits, as the metal-oxide-semiconductor (MOS) capacitor is nonlinear.
Although all real capacitors demonstrate undesired nonlinearity outside of their operating
range (for instance, when exceeding their breakdown voltage), ferroelectric ceramic
capacitors also exhibit a significant nonlinear �-� curve which is used in snubbers for
power electronics switches [38]. Also, nonlinear capacitors are found in biological
systems and can be used as a model for more complex networks.
From the definition of electric current, �(�) = $ %(&)'&() , the current entering a
voltage-controlled nonlinear capacitor can be expressed by:

6
%(�) = '�(�)'� = '�(�)'� ∙ '�(�)'� = �(�)'�(�)'�
where �(�) = +,(-)+- is the dynamic capacitance (also, incremental capacitance), which
is a function of the capacitor voltage (this is a constant equal to the capacitance in the
case of a linear capacitor). In the case of a charge-controlled capacitor, we define the
dynamic capacitance � at a given point � by .� = +-(,)+, , and note that �(/) = ∞ for
1+-(,)+, 23 = 0.
In the case of a charge-controlled nonlinear capacitor (or in the equivalent case
where the � - � curve of a voltage-controlled capacitor is strictly monotonically
increasing), the energy absorbed by the circuit element during an infinitesimal change of
charge '� = %'� is '4 = �'�. In the special case of a linear capacitor, the last
equation becomes
4(�.) − 4(�)) = 5 1� �'�,((7),((8) = 12�5 '(��),((7)
,((8) = 12� :��(�.) − ��(�));, or when expressed in term of voltage, substituting � = ��,
4(�.) − 4(�)) = �2 :��(�.) − ��(�));. We note that the change of energy in the capacitor depends only on the initial and the
final values of its charge, and of its characteristic �-� curve, while being independent of
the functions �(�) or �(�). It is easy to see that a charge-controlled nonlinear capacitor is energy-conserving,
in the sense that when moving from a charge �. to another one �� > �. (charging) and
then back to �. (discharging), we get back the same energy that we have stored.
Assuming that the nonlinear capacitor cannot produce any energy, the stored energy at
any point must be positive:
5 �(�)'� ≥ 0,7) for all �. in the operating range. (2.1)
The above restriction allows to have � < 0 for some positive values of �, but we
shall not explore this possibility. The theory of synthesis of nonlinear capacitors with
prescribed �-� curves using simple components and theoretical two-port elements (i.e.
rotators, scalors, reflectors and mutators) has been investigated by Chua [4, 5] and

7
others, though remained largely impractical, due to the complexity and limitations of
realizing the proposed two-port elements (most of which are circuits that include
realizations of one or more current conveyors, which are abstract 3-terminal current
amplifiers).
2.2. Definition of a virtual infinite capacitor
In this thesis we propose a circuit that behaves like a nonlinear capacitor. While
for a usual capacitor, the dependence of the voltage � on the charge �(�) = $ %(&)'&() is
linear, the �-� plot of the proposed circuit element would have a flat region for � ∈:�ABC, �ADE; as shown in Figure 2.1.
Fig. 2.1: F-G characteristics of a virtual infinite capacitor.
For charges in the interval :�ABC, �ADE; the voltage would remain at a predefined
level �HIJ. Thus, in this interval, our circuit would be equivalent to an infinite capacitor
charged to the voltage �HIJ. A charge-controlled nonlinear capacitor for which � has a flat region, namely
+-+, = 0 for � ∈ :�ABC, �ADE;, will be called a virtual infinite capacitor (VIC). A VIC
should have an additional output through which � can be measured, allowing to keep it
in the desired range � ∈ :�ABC, �ADE;,. Indeed, this is needed because in this range �
cannot be estimated from �. In the region of interest � ∈ :�ABC, �ADE;, the dynamic
capacitance is infinite, but the amount of stored energy is of course finite and not very
large. Thus, our device is good for filtering or voltage regulation, but it is not meant for
energy storage (see also Chapter 3.3). We emphasize that the �-� plot of the VIC does
not have to look like in Figure 2.1. Indeed, outside the flat region :�ABC, �ADE; the plot
may have any shape as long as the restriction (2.1) is satisfied. It is even possible to build
VICs that have a �-� plot with hysteresis, and this may be useful, for instance, if a very
fast power-up is needed (but we do not discuss this in this work).

8
A typical application of the VIC would be to create a constant voltage �HIJ on a
load KL when the energy is coming from a variable current source %�, as shown in Figure
2.2 (which may be a simplified circuit based on Norton's theorem).
Fig. 2.2: A typical application of the VIC, stabilizing the voltage on a load.
The value �HIJ may be adjustable, and � should be measurable, as explained
before. An external charge controller (not shown in the figure) may regulate %� in the
low frequency range, such that � remains in the desired range – we describe this in
Chapter 3.3.

3. A proposed implementation of the VIC
3.1. The canonical switching c
The canonical switching cell, as defined in Kassakian
Figure 3.1, is the basic ingredient in every switched power converter.
Here, / and /M are complementary logical signals, which determine the state of the
switches. Thus, if / =implemented using any suitable high
IGBTs or a diode in the case where the current flows in only one direction (in this case,
only one of the switching device
cycle N of the canonical switching cell is defined as the proportion of time that
hence 0 O N O 1. If /
controller as explained in Chapter 4, the
the proportion of time that
external signals �P, �Q, �switchings. Equivalently,
Assuming the rate
switching frequency, an average model of the canonical switching cell can be derived.
The averages of the rapidly changing signals are:
Hence, a circuit equivalent to the average model can be obtained using controlled voltage
and current sources, as shown in Figure 3.2.
C
�P %P
%Q
9
A proposed implementation of the VIC
The canonical switching cell
The canonical switching cell, as defined in Kassakian et al. [23, Ch. 6]), shown in
Figure 3.1, is the basic ingredient in every switched power converter.
Fig. 3.1: A canonical switching cell.
are complementary logical signals, which determine the state of the
1 then �� �P and if / 0 then �� �Q. The switches can be
any suitable high-frequency switching device, such as MOSFETs,
IGBTs or a diode in the case where the current flows in only one direction (in this case,
switching devices can be a diode). If / is a periodic signal, the duty
he canonical switching cell is defined as the proportion of time that
is a non-periodic signal, such as produced by a sliding mode
ler as explained in Chapter 4, the instantaneous duty cycle N shall be defined as
rtion of time that / 1 over a time interval that it short enough
�R, %P, %Q, %R are practically constant in it, but it contains several
switchings. Equivalently, N is obtained from / by low-pass filtering.
Assuming the rate of change of the external signals is much slower than the
switching frequency, an average model of the canonical switching cell can be derived.
The averages of the rapidly changing signals are:
�S� N�P T �1 � N!�Q,U�P N%R,U�Q �1 � N!%R.
Hence, a circuit equivalent to the average model can be obtained using controlled voltage
and current sources, as shown in Figure 3.2.
%R W �R
/
/M ��
%�P
%�Q
, Ch. 6]), shown in
are complementary logical signals, which determine the state of the
. The switches can be
frequency switching device, such as MOSFETs,
IGBTs or a diode in the case where the current flows in only one direction (in this case,
is a periodic signal, the duty
he canonical switching cell is defined as the proportion of time that / 1,
periodic signal, such as produced by a sliding mode
shall be defined as
that it short enough so that the
are practically constant in it, but it contains several
of change of the external signals is much slower than the
switching frequency, an average model of the canonical switching cell can be derived.
Hence, a circuit equivalent to the average model can be obtained using controlled voltage

Fig. 3.2
Since we intend to use a circuit based on the canonical switching cell as a VIC, it
would be useful to compute the voltage ripple
of �P � �Q) on the capacitor
external impedance between
currents %P, %Q, %R and assume a constant switching frequency
flowing through the capacitor and of the voltage across it are shown in Figure 3.3. While
/ 1 (the falling slope of the capacitor voltage), we have
As we assumed that %P
Fig. 3.3: Plots showing the current flowing through the capacitor
(upper plot) and the voltage across it (lower plot).
C
�Q
�P %P
%Q
%P � %�
%P � %R �P � �Q
%P
�P � �QSSSSSSSSSS
10
3.2: An average model of a canonical switching cell.
Since we intend to use a circuit based on the canonical switching cell as a VIC, it
would be useful to compute the voltage ripple �� (defined as the peak-to
on the capacitor � . For the sake of this computation, we assume infinite
external impedance between �P and �Q, neglect any interference from the ripple in the
and assume a constant switching frequency 1/&. Plots of the current
apacitor and of the voltage across it are shown in Figure 3.3. While
(the falling slope of the capacitor voltage), we have
� ''� ��P � �Q! %P � %R. P � %R is constant, we obtain by integration
�� %R � %P� N&.
Plots showing the current flowing through the capacitor
(upper plot) and the voltage across it (lower plot).
C%R �R
W N%R
N��P � �Q!
P
Q
�S�
U�P
U�Q
+-
�
�
�P
Q / 1
/ 0
Since we intend to use a circuit based on the canonical switching cell as a VIC, it
to-peak variation
, we assume infinite
, neglect any interference from the ripple in the
. Plots of the current
apacitor and of the voltage across it are shown in Figure 3.3. While
Plots showing the current flowing through the capacitor Y
��

3.2. The proposed circuit
We propose an approximate
Figure 2.1, partially shown in Figure
are omitted from the figure). This realization is only an approximation
additional undesirable effects: switching noise, switching losses and small oscillations of
the voltage�.
Fig. 3.4: An approximate realization of a
and the drivers.
measuring Z[. We recognize that the central part of the circuit in Figure 3
cell, operating as a bidirectional DC/DC converter.
period \], and the signals
sampling period. In a typical application, when the VIC is used to filter t
voltage of a power factor compensator (PFC), the current
oscillate at twice the grid frequency. Charge
transferred to the capacitor
fluctuations is much lower than the
voltage �R will vary while keeping
filtering effect. Let us denote by
when� ∈ :�ABC, �ADE;
�R,ABC cannot be chosen too small, because it would lead to the DC/DC converter
working at a high voltage ratio and hence low efficiency. Ther
why �R,ABC cannot be chosen too small, and similarly
small: this will become clear when we discuss the control of the VIC in
+
_
�
11
proposed circuit
We propose an approximate realization for the virtual infinite capacitor
partially shown in Figure 3.4 (the controller and the drivers of the switches
are omitted from the figure). This realization is only an approximation
additional undesirable effects: switching noise, switching losses and small oscillations of
: An approximate realization of a VIC, not showing the controller
The connections on the right side are used only for
We recognize that the central part of the circuit in Figure 3.4 is a canonical switchin
cell, operating as a bidirectional DC/DC converter. The controller works with a sampling
, and the signals /, /M ∈ ^0,1_ that control the switches are constant during each
sampling period. In a typical application, when the VIC is used to filter t
voltage of a power factor compensator (PFC), the current % (and hence the charge
oscillate at twice the grid frequency. Charge fluctuations in the range
to the capacitor �R via the converter, as long as the frequency of the
fluctuations is much lower than the controller sampling frequency
will vary while keeping � almost constant (close to �HIJ), which is the desired
Let us denote by :�R,ABC, �R,ADE; the interval in which
;. We impose that
0 ? �R,ABC ? �R,ADE ? �HIJ. cannot be chosen too small, because it would lead to the DC/DC converter
working at a high voltage ratio and hence low efficiency. There is also another reason
cannot be chosen too small, and similarly �HIJ � �R,ADE cannot be chosen too
small: this will become clear when we discuss the control of the VIC in Chapter 4
W C %R
/
%
/M �R �R
realization for the virtual infinite capacitor from
(the controller and the drivers of the switches
are omitted from the figure). This realization is only an approximation, as it exhibits
additional undesirable effects: switching noise, switching losses and small oscillations of
, not showing the controller
The connections on the right side are used only for
canonical switching
The controller works with a sampling
that control the switches are constant during each
sampling period. In a typical application, when the VIC is used to filter the output
(and hence the charge �) will
fluctuations in the range :�ABC, �ADE; are
he frequency of the charge
1/\] . Thus, the
), which is the desired
the interval in which �R will vary
cannot be chosen too small, because it would lead to the DC/DC converter
e is also another reason
cannot be chosen too
Chapter 4.

12
We give a brief description of the circuit operation in the various regions that
correspond to the linear segments of the plot from Figure 2.1. In the first region, when
the total charge of the system is small (e.g., during power-up), the converter creates an
almost constant ratio between its input and output voltages,
N �R� �R,ABC�HIJ . This situation corresponds to the first (left) linear segment of the plot in Figure
2.1. Thus, when � reaches the value �HIJ, then �R reaches the value �R,ABC. The charge
needed for � to reach the voltage �HIJ is �ABC. The control of the converter in the first
region can be, for example, sliding mode control or pulse width modulation (PWM) with
proportional control. The dynamic capacitance in this region is � T N��R (this is valid
for frequencies significantly lower than the resonant frequency of W and �R). The second
region corresponds to the horizontal segment (for � ∈ :�ABC, �ADE;) and this is where
we want the circuit to be most of the time, because here the dynamic capacitance is
infinite. The circuit remains in the horizontal region until �R reaches the maximum
allowable value �R,ADE . The control of the VIC in the horizontal region will be discussed
in Chapter 4. In the first two regions, the switches change their state frequently, such that
/M 1 � / (actually, small delays may have to be introduced to reduce switching losses).
The third region corresponds to the rightmost segment of the plot in Figure 2.1, when
the capacitor � is on its own, while �R remains at the constant level �R,ADE . In the third
region we have / /M 0 and the dynamic capacitance is �. This situation occurs if we
overcharge the VIC.
We note that another possible realization of the VIC with �R > �HIJ exists, by
reversing the DC/DC converter. This alternative realization allows much better
regulation of �, but the higher voltage required on �R may be a drawback for many
applications.
3.3. Controlling the charge in a VIC
First, we derive a limitation on the current flowing through the VIC in sinusoidal
regime, assuming that the VIC remains in the region � ∈ :�ABC, �ADE;. Most of the
energy stored in the VIC (if realized as in Figure 3.4) is stored in the capacitor �R. Thus,
the operating range � ∈ :�ABC, �ADE; corresponds to �R holding energy in the range

13
.��R�R,ABC� ≤ 4 ≤ .��R�R,ADE� . (3.1)
As power regulation is a typical application of the VIC, it is useful to consider a
sinusoidal input current % ") sin 2cd��, as would be the case in a PFC working in
steady state on a grid with frequency gω , ignoring the ripple current (see Section V). We
assume that � �HIJ is constant. During the first half of the period (when 2cd� ≤ e)
the VIC is storing energy, and during the second half the same energy is returned. The
amount of energy stored during the half period (the increase in the total stored energy) is
Δ4 = �5 ") sin 2cd��'� = �")cd .fghi
)
According to (3.1), we have the upper bound Δ4 O .��R�R,ADE� � .��R�R,ABC� . It
follows that in order to maintain the VIC energy within the required range, the steady
state current amplitude must satisfy:
") ≤ cd�R2� j�R,ADE� � �R,ABC� k. (3.2)
Suppose that the VIC is a part of the general circuit from Figure 2.2. As mentioned
at the end of Section I, an external charge controller usually affects ini in the low
frequency range, in order to keep � ∈ :�ABC, �ADE; , or equivalently, to keep �R ∈:�R,ABC, �R,ADE;. We give an example of a simple charge controller for the circuit in
Figure 2, which can be easily adapted to most applications.
A useful way of representing ini would be
Ulm��n! 'm�n! To�n! ∙ pq�n!, (3.3)
where a hat denotes the Laplace transformation, ' is a continuous and bounded signal, p
is the control signal and o is a low-pass filter used to limit the bandwidth of the control.
The presence of o means that the control can influence %� only in the low frequency
range, corresponding to the bandwidth of o . This corresponds to typical system
constraints, such as a unity power factor in the case of a PFC, where the control should
not influence %� at the grid frequency and its harmonics, but only at lower frequencies
(see Chapter 5). For simplicity we take o�n! ..Pr] , with & > 0.

14
The total energy stored in the VIC (neglecting the inductor) is 4 .� :�R��R T���; . In the operating region � ∈ :�ABC, �ADE; the voltage � is constant, hence
'4 �R�R'�R.
Fig. 3.5: An example of a VIC charge controller, using a PI controller to
obtain the oscillations of Gst around the mid-point of the allowed range.
The squaring block compensates the nonlinearity in the plant due to (3.4).
Equating this with '4 �'� we obtain +-u+, --u�u . The solution of this
differential equation is
�R v2��R � T �R), (3.4)
where �R) is a constant. Applying the above relation for � �ABC, we obtain that
�R) �R,ABC� � 2�ABC��R . Denoting ')��! '��! � %wx(��! and using (3.3), we also have
Ulm�n! 'm)�n! To�n! ∙ pq�n!. (3.5)
We want to control p��! such that the closed loop system is stable and for any
constant '), we have lim(→| �R ��! �R,HIJ, where
+
�R,HIJ�
�R�
o�n!
1n v2��] � T �R)
�
p
CHARGE
CONTROLLER
+
}� ~1 T 1&�n� �
+
-
% �R ') ' � %wx(

15
�R,HIJ� 12�R �R,ADE� � �R,ABC� �. The choice of �R,HIJ follows from our desire to allow a maximal dynamic range for
4 in (3.1), so that the reference voltage �R,HIJ corresponds to the midpoint of the VIC
energy range.
Introduce the tracking error � �R,HIJ� � �R�. We propose to achieve the control
objective by using a PI controller }� �1 T .r�]�, with }� > 0 and &� > 0, as shown in
Figure 4. There is a squaring block in the loop, which is meant to cancel the square root
introduced by (3.4). From the block diagram we have �l � ++( ��R�! � �-�u %, and using
(3.5) we get
n��n! � ��0! �2��R jo�n!pq�n! T 'm)�n!k �2��R �o�n!}� ~1 T 1&�n� ��n! T 'm)�n!�. Using the formula for o�n!, we obtain
��n! ��n!'m)�n! � �R2� ��n!��0!, where
��n! � �-�u n�1 T &n!&n� T n� T �-�u }�n T �-�u��r�.
The stability condition for � is &� > τ, which follows from the Routh criterion.
Since �(0) = 0, it follows that for constant ') , we have indeed lim(→| � (�) = 0 as
required. The stability of the closed loop system and the fact that �(0) = 0also implies
the following: if we assume that ') is a stationary random signal, then 4(�) =�(0)4(')) = 0. If ') is a constant plus a sinusoidal signal of frequency 2cd (e.g. in a
PFC), then � is a sinusoidal signal (attenuated by �� 2%cd�� ), so that �R� oscillates
symmetrically around �R,HIJ� .

16
4. Control of the VIC
4.1. Sliding mode control
Sliding mode control (SMC) is a method of discontinues control, where the control
signal p can only have a finite number of possible values, usually two. The application of
an appropriate control law moves the phase trajectory towards a "sliding surface", which
is a desired reduced order subspace of the system state-space. The system state will then
remain close to (or "slide" along) the sliding surface, thus maintaining a sliding mode
operation. The control signal usually changes the mode (substructure) of a Variable
Structure System (VSS), for instance, by opening or closing a switch in a switched
power converter.
Sliding mode controllers are used primarily in controlling non-linear systems,
where a conventional continuous controller is hard to implement or not robust. Vadim
Utkin, one of the originators of SMC, writes that: "the major advantage of sliding mode
is low sensitivity to plant parameter variations and disturbances which eliminates the
necessity of exact modelling. Sliding mode control enables the decoupling of the overall
system motion into independent partial components of lower dimension and, as a result,
reduces the complexity of feedback design." [42]
Fig. 4.1: The example double integrator system with variable feedback
defined in (4.1). � is a discontinuous control signal, determined by the
sliding mode control law in (4.2) (taken from [37]).
We demonstrate the principle and characteristics of sliding mode control using a
double integrator with variable feedback gain as the plant to be controlled (this example
is from Spiazzi et al. [37]). This system is described by the following equations
(illustrated in Figure 4.1):
��l. = ��,�l� = }p�.,1 (4.1)
1/s 1/s '
p

17
where p ∈ ^1,−1_ is the discontinuous control input. When p = −1 , the system is
marginally stable with eigenvalues �.,� = ±%√}. When p = 1, the system is unstable
with eigenvalues �.,� = ±√} (there exists a stable trajectory in this case, �. = −√}��,
which is extremely non-robust). The phase trajectories of the two substructures of (4.1)
are shown in Figure 4.2.
Fig. 4.2: The phase trajectories of the system from Figure 4.1. Note that
the system is unstable for all but singular starting conditions, which are
sensitive to perturbations (taken from [37]).
The control law takes the form:
�.(�� + ��.) < 0 ⟹ p = +1,�.(�� + ��.) ≥ 0 ⟹ p = −1, (4.2)
where � < √} is a control parameter. This control law divides the phase-plane into two
regions, whose boundaries are the �� axis and the line �� + ��. = 0 (see Figure 4.3).
When the state trajectory crosses from one region to another, the control signal changes,
which changes the substructure of the system and causes the state trajectory to change
course. The control law should be designed to ensure that the phase trajectory will move
towards and hit a sliding surface (here, the line �� + ��. = 0) from an arbitrary initial
condition, and that the state trajectory in the vicinity of the sliding surface does not move
away from it. These conditions are called the hitting condition and the existence
condition, respectively [8]. The motion of the state trajectory on the sliding surface is
called sliding mode [37] or sliding motion, and is completely different from the
trajectories dictated by the substructures of the VSS. Indeed, on the sliding surface we
have "infinitely fast" switching of p and the evolution of the system obeys a different
differential equation. An additional desirable property of the control law is stability,
achieved when the sliding motion is always directed towards an equilibrium point, 0 in
� = −�
substructure I
� = �
substructure II

18
our example. In any practical application the switching frequency (of the commutation
between the substructures) is of course finite, hence the state trajectory will oscillate
around the sliding surface, and this trajectory will be an approximation of the sliding
motion (this is sometimes called Quasi-Sliding-Mode, or QSM [8]).
Fig. 4.3: The sliding regime of the system from Figure 4.1, under the
control law from equation (4.2). In region I, the control signal is � = −�,
and in region II, � = �. The state trajectory shows oscillations around
the sliding surface �t + ��� = � , which are present in every
implementation of SMC (taken from [37]).
Let us consider now a general non-linear system [37]:
�l = �(�, �, p) = ��P(�, �, p)����(�, �) > 0,�Q(�, �, p)����(�, �) < 0,1 where � is the state vector of the system, and the vector function � (of the same
dimension) is discontinuous on the surface � = 0, where �(�, �) is called the sliding
function. The system is in sliding mode if the state � moves on the sliding surface �(�, �) = 0. The SMC process can be divided into two phases. In the first phase, called
the reaching phase [8], the controller will drive the state trajectory to converge, or hit,
the sliding surface. This phase is possible if the hitting condition, which must be derived
for the specific problem, is satisfied. The second phase is the sliding mode operation,
during which the state trajectory stays in the vicinity of the sliding surface and moves
towards a stable equilibrium point or a desired limit cycle. This is possible if the
existence and stability conditions are satisfied, which will be discussed below.

19
The existence condition demands that the state trajectories in the two
substructures on both sides of the sliding surface must be directed towards it. In other
words, for a series � → �), where �(�, �)) = 0, we have:
�(�, �) > 0�(�, �) < 0 ⇒ lim��→�8 ∇�(�, �)) ⋅ �P(�, �, p) < 0lim��→�8 ∇�(�, �)) ⋅ �Q(�, �, p) > 0. Since �l = ∑ ¢£¢�¤ ¢�¤¢( = ∇� ⋅ �, the existence condition becomes (see also a related but not
precise formulation in [37]):
�(�, �) > 0, lim��→�8 �l(�, �) < 0�(�, �) < 0, lim��→�8 �l(�, �) > 0 ⇒ lim��→�8 sgnj�(�) ∙ �l(�)k = −1. (4.3)
Naturally, the condition sgnj� ⋅ �l k = −1 when not limited locally to the vicinity
of � = 0, is a sufficient (yet hard to accomplish) hitting condition. We give here, without
proof, another, more practical, sufficient hitting condition. Let �P, �Q steady state
vectors corresponding to the inputs pP, pQ (the two possible values of p), respectively.
The sufficient hitting condition is given by:
�(�P) < 0,�(�Q) > 0. Good references on sliding mode control are Edwards and Spurgeon [8], Young,
Utkin and Özgüner [47] and Fridman, Moreno and Iriarte [10]. Levant [25] discusses
higher order sliding modes, and Spiazzi et al [37] and Tan, Lai and Tse [37] address the
issues of SMC in DC/DC converters.
4.2. The control problem of a boost converter
Let us discuss in more detail the operation of the circuit from Figure 3.4 for � ∈ :�ABC, �ADE;. Notice that we may now regard the capacitor �R as a variable voltage
source and the circuit as a boost converter that should produce a constant output voltage �HIJ. We start by showing that the aim of keeping exactly � = �HIJ cannot be achieved,
no matter what control strategy (and switching frequency) we use. This fundamental
limitation for boost converters has been discussed also in Sira-Ramirez [36] and Ortega
et al. [31, Ch. 7].

Consider the average model of the circuit
11]). Recall that no current is flowing to the terminals on the right.
constant, we have:
where N is the short-time average of
that 0 O N O 1. Hence,
�lRThis is a second order nonlinear system with state variables
control signal N. From the equality of the two expressions for
which cannot be limited
values, and hence it must
It is known that
converter (making the voltage error small) is difficult due to the unstable zero dynamics
[31, Ch. 6]. We examine th
Figure 4.4, but this time
and we are interested in the dynamics of
variables � and %], with
�
20
Fig. 4.4: Average model of the VIC.
the average model of the circuit, shown in Figure 4.4 (following [
Recall that no current is flowing to the terminals on the right. Assuming
¦N�R�lR = %,�R T WUllR N�,�R�lR %R,1
time average of / (this is the duty-cycle if q is a
Hence,
lR %N�R ,�lR %R�R ,UllR N� � �RW . This is a second order nonlinear system with state variables �R, %R , which
. From the equality of the two expressions for �lR we get
N %%R, limited to :0,1; since %R must alternate between positive and negative
must cross zero. Thus, the precise regulation of � is not possible.
t is known that the related problem of controlling the output voltage of a boost
converter (making the voltage error small) is difficult due to the unstable zero dynamics
We examine this regulation problem using the same average model from
Figure 4.4, but this time we have a constant voltage source in place of the capacitor
we are interested in the dynamics of �. We write the state equations with the state
, with �] and % constants:
�R %R �R
W
%
C +-
N�R�lR N�
shown in Figure 4.4 (following [23, Ch.
Assuming that � is
is a PWM signal) so
which depends on the
must alternate between positive and negative
is not possible.
put voltage of a boost
converter (making the voltage error small) is difficult due to the unstable zero dynamics
regulation problem using the same average model from
n place of the capacitor �R
e write the state equations with the state

21
Ull] N� 1W � �]W ,�l �N %]� T %�.
(4.4)
Eliminating the inductor current %] from (4.4), we obtain the second order ODE
�§ � NlN �l T N�
W� � N�]W� � Nl�N %. To keep � at a desired equilibrium point � �∗ , we must have �§ �l 0 . The
resulting differential equation describes the dynamics of the duty cycle N:
Nl N�W% ��] �N�∗!. (4.5)
The equilibrium points of (4.5) are given by
N 0,N �]�∗. The equilibrium point N 0 forces �] 0 and % 0 , which is a trivial equilibrium
point. The second equilibrium point has more physical significance. Recalling that an
equilibrium point �∗ of a scalar ODE �l ©��! is asymptotically stable if ©′��!1|�¬�∗ ?0, the stability of N --∗ is dependent on the direction of the current %. For % ? 0 (which
is the case when power is transferred to the higher voltage, and it is the case half of the
time in the VIC) this equilibrium point is unstable, as seen from the plot of equation (4.5)
in Figure 4.5.
Fig. 4.5: Plot of the function from (4.5) for ® ? 0 . The nontrivial
equilibrium point is unstable.
This difficulty is present even if we linearize the equations (we obtain a zero in the
right half-plane). In the linear case, this problem has been addressed by various
techniques, including ∞H control, see for instance Naim et al. [30]. The approaches
Nl N
N --∗ 0

22
based on linearization are completely inadequate when the input voltage of the boost
converter (�R in our case) varies significantly, since the small signal assumption of the
linearization is violated. Sliding mode control of boost converters, which seems to be a
very attractive approach, has been explored by several researchers, among them [31],
Cortez et al. [6], Escobar and Sira-Ramirez [9], Gee et al. [12], Guo et al. [15], Tan, Lai
and Tse [41] and Wai and Shih [46].
4.3. The proposed control algorithm
We now introduce a sliding mode controller for our circuit from Figure 3.4,
working in the region � ∈ :�ABC, �ADE;. The state equations of this system are:
¦��l = −/ ∙ %R + %,WUllR = / ∙ � − �R,�R�lR = %R.1 (4.6)
These equations are considered only in the operating range Ω defined by
|%R| O %R,ADE,�R ∈ :�R,ABC, �R,ADE;,� > �ABC, (4.7)
where 0 < �R,ABC < �R,ADE < �ABC < �HIJ. We design a sliding mode controller which is
inspired by the one in Hijazi et al. [18], but is not the same. Indeed, the sliding function
in [14][18] (a function of two state variables) is designed for a boost converter with a
constant input voltage, while our circuit requires a modified sliding function (a function
of three state variables and the disturbance %). For an oscillating (but positive) voltage �R
and an oscillating input current i we propose to use the following sliding function:
� = �HIJ − � − �(�HIJ ∙ % − �R ∙ %R), (4.8)
where only �HIJ is constant. The sliding surface Γ is the set of all possible states
� = ±�%R�R² ∈ Ω for which �(�) = 0. The proposed sliding mode control is:
/ = �1%�� < 0,0%�� ≥ 0,1 /M = 1 − /. This control law is written in an ideal form that would lead to infinitely fast switching of / and /M. In reality the switching frequency is limited, since the controller has a finite
sampling frequency 1/\] , but we ignore this fact in our analysis, because 1/\] is
assumed to be high (for further discussion see Section 4.4).

23
In order to ensure that the state trajectories will converge to the sliding surface Γ
for any initial conditions in Ω, we must derive a sufficient condition for the sliding mode
coefficient �. We require that � ∙ �l < 0 for every � ∈ Ω Γ⁄ . This is a sufficient hitting
condition as explained in Section 4.1.
We impose limitations on the input %: |%| O %ADE,�Ull� O UllADE, (4.9)
where %ADE > 0, UllADE > 0 . Imposing a bounded Ull might pose a problem for many
applications, but in fact the circuit will tolerate short times when �Ull� exceeds UllADE, for
example due to sudden changes in the load connected in parallel to the VIC. During these
short times, the hitting condition may be violated, so that |�| may temporarily grow, but
this will be corrected later by the controller. For reasons that will become clear later, we
assume that
�ABC > WUllADE �HIJ�R,ADE + �R,ADE. (4.10)
Suppose that � > 0 (hence / = 0). Then from (4.6), (4.8),
�l = − %� + � ´%R��R − �R�W µ − ��HIJUll. (4.11)
Using (4.11), the condition �l < 0 becomes a condition on �, which in the worst case is
� ´�R,ABC�W − %R,ADE��R − �HIJUllADEµ > %ADE� . (4.12)
Now suppose that � < 0 (hence / = 1). Then from (4.6), (4.8),
�l = %R − %� + � ´%R��R + �R�W − �R�W µ − ��HIJUll. (4.13)
Similarly as in the previous case, the condition �l > 0 becomes:
� ¶�R,ADE �ABC − �R,ADE�W − �HIJUllADE· > %ADE + %R,ADE� . (4.14)
From (4.10) we know that the coefficient of k in (4.14) is positive.
To satisfy both (4.12) and (4.14), � must be larger than a certain minimal value
�ABC > 0 (which can be expressed easily in terms of �R,ABC, �ABC, %R,ADE, %ADE, UllADE).

24
Positive values of � < �ABC can also be chosen for the sliding function if we
assume that � stays close to Γ. This is useful because a smaller � enables better output
voltage regulation, as long as the system remains stable. The condition can be expressed
by requiring that lim�→�8 sgnj�(�) ∙ �l(�)k = −1 for all �) ∈ Γ (this is the existence
condition from Section 4.1). From (4.8) we have
�(�) = 0 ⟹ % = �HIJ − � + ��R%R��HIJ . (4.15)
For � > 0, combining (4.11) and (4.15) gives the condition
���HIJ ´�R�W − %R��R + �HIJUllµ + � �R%R� > 1� (� − �HIJ). (4.16)
In a similar way, for � < 0, combining (4.13) and (4.15) gives the condition
���HIJ ´%R��R + �R(� − �R)W − �HIJUllµ + � (�HIJ − �R)%R� > 1� (�HIJ − �). (4.17)
Choosing � that satisfy both the conditions (4.16), (4.17) will fulfill the existence
condition and will ensure that the state trajectory near the sliding surface will always be
directed towards the sliding surface. Finding the range of � that will satisfy (4.16) and
(4.17) for all possible � ∈ Γ and for all Ull satisfying �Ull� < UllADE is a numerical problem
that is best handled by a computer. One usually obtains a condition of the type > �¹ABC ,
where 0 < �¹ABC < �ABC . In order to get reasonable results, we must impose an upper
bound �ADE on �, otherwise (4.16) would require an infinite �. When choosing � based
on the existence condition, we choose �ABC and �ADE close to �HIJ, to get a better (i.e.,
lower) value for �¹ABC.
Formula (4.15) imposes an upper bound for the ripple of � when � stays close to Γ
and the existence condition is satisfied. Indeed, expressing � from (4.15) and then
applying the first two constraints from (4.7) and the first constraint from (4.9) we obtain
|� − �HIJ| < � �R,ADE ∙ %R,ADE + �HIJ ∙ %ADE�. Computing �l as a function of /, the state variables, % and Ull and setting �l = 0, we
can derive the short-time average of /:
/S = W% + �� ��R� − L�u %R� + WUll�HIJ�W%R + ���R� (4.18)

25
By setting � = 0 and substituting (4.15) into (4.18), we get
/S = W -º»¼Q-P�-u�u�-º»¼ + �� ��R� − L�u %R� + WUll�HIJ�W%R + ���R� .
We note that the sliding mode control can also be achieved by an equivalent PWM
control with the duty cycle N = /S. However, we think that this equivalent PWM control
is not practical, because it requires the measurement of Ull and a complicated computation.
4.4. Parameter sensitivity of the VIC
After establishing the control of the VIC and the key requirements for its
operation, we wish to evaluate the sensitivity of the controller performance to the
changes of two important parameters: the sliding function constant �, and the sampling
period of the controller (\] from the previous section, which is actually the time between
consecutive control decisions). The first parameter was discussed at length in the
previous section. The second parameter is dependent on the implementation and requires
some explanation. The analysis done so far assumes that a change in / can occur at any
time, with unbounded switching frequency. In practice, such a controller is not possible,
and a finite frequency approximation to SMC must be observed. There are several
approaches to this approximation, including hysteresis-based control, constant ON time,
constant switching frequency, limited maximum switching frequency and constant
sampling frequency [40]. In our implementation, a constant sampling period \] is used,
and after each sampling the controller decides whether to perform a switching. Hence,
the switching frequency is variable and bounded by half the sampling frequency. The
relation between the sampling frequency 1/\] and the actual switching frequency is
shown in Figure 4.6. All the plots in this section were done with the simulation
parameters of Chapter 6 (with � = 0.002, except in Figure 4.9).

26
Fig. 4.6: The average switching frequency of the VIC vs. the sampling
frequency of the controller �/½¾. The ratio of the sampling to switching
frequency varies from 1:6.5 to 1:8.5.
Fig. 4.7: The RMS error in the output voltage G over 3 grid semi-cycles
(in red) and one semi-cycle (in blue) vs. the sampling period ½¾.
1 2 3 4 5 6 7 8 9 100
200
400
600
800
1000
1200
1400
sampling freq. (1/Ts) [MHz]
sw
itchin
g f
req.
[kH
z]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
3.5
Ts [usec]
Vc e
rror
- rm
s

27
Fig. 4.8: The RMS error in the output voltage G over 3 grid semi-cycles
(in red) and one semi-cycle (in blue) vs. the switching frequency of the
VIC.
Since we wish to evaluate the performance of the VIC, we chose the RMS error of
the output voltage �HIJ − � as a simple assessment measure. We have calculated this
value over three semi-cycles of the grid (30ms, the red line in Figures 4.7-4.9) and over
one semi-cycle (10ms, the blue line in Figures 4.7-4.9), when the circuit was in steady
state. High sampling frequency calculations over 3 semi-cycles are not shown due to
simulation limitations. In Figure 4.7 we observe the almost linear decrease of the RMS
error with the shortening of the sampling period \] . Figure 4.8 shows the same
phenomenon, with respect to the switching frequency (which relates to \] via the plot in
Figure 4.6). This plot has practical importance, since the power losses of the VIC are
linearly related to the switching frequency in our implementation (although this can be
amended in a zero voltage switching implementation of the same circuit).
The dependence of the RMS voltage error on the sliding coefficient � is shown in
Figure 4.9. As expected, lower � causes the voltage error to decrease, since the term �HIJ − � in the sliding function from (4.8) becomes more dominant. However, we can
only decrease � down to a certain limit, set by the hitting and existence conditions.
0 200 400 600 800 1000 1200 14000
0.5
1
1.5
2
2.5
3
switching freq. [kHz]
Vc e
rror
- rm
s

28
Fig. 4.9: The RMS error in the output voltage G over 3 grid semi-cycles
(in red) and one semi-cycle (in blue) vs. the sliding coefficient ¿ defined
in (4.8). The vertical line represents the calculated minimal ¿ that fulfils
the hitting and existence conditions, at a sampling frequency of 2MHz.
0 1 2 3 4 5 6 7 8
x 10-3
0.5
1
1.5
2
2.5
3
3.5
4
k
Vc e
rror
- rm
s

29
5. An application of the VIC in a PFC
5.1. Power Factor Compensation
The power factor (PF) is defined as the ratio between the active power and the
apparent power of a system. If the current % and voltage À are periodic with period \, and
%, À ∈ ℒ�:0, \), then the active power is defined by ⟨À, %⟩ = 7Ä $ À(�)%(�)'�Å) (their inner
product in ℒ�:0, \) ), and the apparent power is defined by ‖À‖‖%‖ [11]. Hence,
PF = ⟨À, %⟩‖À‖‖%‖. When the voltage and the current are both purely sinusoidal, the PF is equal to the
cosine of the phase angle È between them. For sinusoidal voltage and non-sinusoidal
current, we define ". as the fundamental component of the current, and "�] as the RMS
value of the current [1]. The PF depends of both the distortion factor of the waveform
(defined as "./"É�]) and the displacement factor related to the phase angle (��nÈ, where È is the phase difference between the fundamental component of the current and the
voltage waveform), in the form
PF = "."É�] ��nÈ. There are several reasons to seek a close to unity PF. First, the conduction losses in the
grid depend on the current, which is proportional to the apparent power. Since only
active power is used by the load, a PF < 1 will cause power losses due to the reactive
power flowing through the grid. In addition, harmonics caused by the waveform
distortion may disrupt other devices connected to the grid. The purpose of power factor
compensation (PFC) is to minimize the input current distortion factor, and to minimize
the phase difference between the voltage and current waves. This process is also called
power factor correction [1] or power factor conditioning [33] (each abbreviated as PFC).
As in most power supplies the periods of the current and voltage waveforms are
the same, and the peaks of the current coincide with the peaks of the voltage, the
displacement factor is close to unity. Hence, the task of PFC is reduced to eliminating the
higher order harmonics of the input current. The PF can thus be approximated by

30
PF ≈ "."É�] = v 11 + THD� , where THD is the "total harmonic distortion", which is the quadratic sum of amplitudes
of the unwanted harmonics over the squared amplitude of the fundamental harmonic
[32]. Hence, an equivalent desirable quality of a PFC would be a THD close to zero.
Several standards have been established to limit the harmonic content of the input
current of a power supply, the most common of them is EN61000-3-2 set by the
European Union in 2001. Passive PFC circuits (built from transformers, diode and
passive circuit elements) usually do not meet the standard criteria under a wide range of
loads and for applications with higher power than approximately 400W [16]. In addition,
passive PFC circuits require large and heavy magnetics. For this reason, an active PFC
circuit is usually implemented in modern power supplies. Rectifier bridges and boost
converters are most commonly used in active PFC, mostly due to their easy
implementation and good performance [1].
There are several approaches to building a PFC based on boost converters, among
them are critical conduction mode, continuous conduction mode, frequency clamped
critical conduction mode and discontinuous conduction mode boost converters.
Topologies of two boost stages are used in interleaved PFCs (common in low-profile
form factor converters) where two stages operate out-of-phase in order to reduce the
current ripple, and in bridgeless PFCs [32]. A myriad of other PFC topologies have been
proposed in the literature, for various applications and with diverse properties.
5.2. The proposed circuit
The performance of the VIC has been examined in a typical application as the
output capacitor of a boost converter used in a PFC, shown in Figure 5.1. For the boost
converter in a PFC there are two control objectives, namely: (1) attaining a nearly
constant output voltage� = �HIJ; (2) keeping the (short-time) average value of the input
current %d nearly proportional to the input voltage pd = Î sin(c�) , thus obtaining a
close to unity power factor.
There are several methods to build a PFC boost converter in continuous or
discontinuous conduction modes. The boost converter depicted here operates in the
critical conduction mode (CRM), also called border-line mode, as described in Gotfryd
[13] and in Lai and Chen [24]. In the CRM operation, each current pulse of %L has the

31
form shown in Figure 5.2. During 0 O � < �w in each pulse, the switch will be closed
and the inductor current %L will rise. During �w O � < \ the switch will be open and the
energy in the inductor will be released to the load and the VIC, causing %L to fall to zero,
Fig. 5.1: A PFC using a boost converter with a VIC as the output capacitor. Note that
the voltage Gs is measured, which is equivalent to measuring F as in Figure 2. The
internal sliding-mode controller of the VIC is not shown.
since � > pÉ = �pd�. When %L = 0 is detected, the switch will close again, starting the
next triangular pulse. Note that the switching frequency 1 \⁄ (which is variable) should
be much greater than the grid frequency. The average current in a triangle is
UlLÏ = pÉ2WÐ �w. (5.1)
Thus, to create an average current that is proportional to pÉ, we hold �w constant
during each semi-cycle of the grid (from one zero crossing of the grid to the next). Then
(according to (5.1)) the boost converter is seen from the grid like a resistor with
resistance �LÑ(Ò� , which is a desirable behavior.
Fig. 5.2: The waveform of the inductor current, as required for critical conduction mode.
%Ó
%Ó%L
%L
CRITICAL-MODE
CONTROLLER
%d pÉ
pÉ%wx(
%wx(% %
WÐ �
K �R �HIJ /��
�w %wx(
pd AC
LINE
VIC
��
%L
pÉWÐ �w
�w \ �

32
The diode is conducting only when the switch is open, hence its current %Ó
corresponds to the descending part of %L in Figure 5.2 (for �w O � < \), and %Ó = 0
otherwise. The average current of the diode is
UlÓÏ = 1\ (\ − �w) pÉ2WÐ �w. (5.2)
From elementary considerations we have −�w = xÔ-QxÔ �w , from where \ =--QxÔ �w. Substituting this into (5.2) we obtain the (short-time) average current of the
diode:
UlÓÏ = pÉ��w2WÐ�. (5.3)
The expressions (5.1), (5.3) enable us to obtain an average model of the boost
converter using a resistor and a current source that both depend on �w, as shown in
Figure 5.3.
The current flowing into the VIC is % = %Ó − %wx( . This current is fluctuating at
twice the grid frequency, and is linearly dependent on �w. We recall that the purpose of
the VIC is to hold V constant. Thus, keeping � in the region � ∈ :�ABC, �ADE; (which is
equivalent to keeping �R ∈ :�R,ABC, �R,ADE;) involves regulating �w using a variation of
the charge controller presented in Chapter 3. The value �w that the boost converter
receives is updated when the grid voltage crosses zero, hence at twice the grid frequency,
because �w should be constant in each semi-cycle to guarantee a nice sinusoidal shape
for %d . In addition, a feed-forward term from %wx( is used to improve the transient
response to changes in the load:
�w(n) = o(n) ∙ pq(n) + }Ulmwx((n), (5.4)
where p is the output of the PI controller, as in Figure 3.5, and } is the feed-forward
gain:
} = 4W�HIJpd,ADE� , (5.5)
where pd,ADE is the amplitude of the grid voltage. This gain is derived from the steady-
state criterion for zero energy change during one grid semi-cycle. Indeed, integrating
(5.3) and a constant %wx( over one grid semi-cycle �0, ÕÖi� we obtain
pd,ADE� �w2WÐ� 5 sin� cd��'�Õ/Öi) = %wx( ecd.

33
Expressing from here �w, we obtain the factor } from (5.5).
Fig. 5.3: The PFC from Figure 5.1 with the average model of the boost converter.
The VIC charge controller affects both the PFC input current and the VIC input
current via ×ØÙ. Since Y®Ù is small, the circuit looks from the grid like a resistor
with resistance tÚÛ×ØÙ . Note the similarity of the right side of this circuit to the circuit
in Figure 2.
The load changes are supposed to be rare events (when a sudden change in the
load occurs, the first priority is to maintain a constant �, even at the price of temporarily
causing a distortion in %d). The feed-forward term may instantaneously affect �w, thus
violating the PFC objective of sinusoidal %d , in case the VIC does not have enough
energy reserve. The internal sliding mode controller of the VIC is not shown in Figures
5.1 and 5.3.
Finally, we discuss the power-up process of the converter. The circuit shown in
Figure 5.3 must be connected to the grid at a proper time, where �pd� ∈ :pABC, pADE; . The upper limit pADE is required in order to limit the in-rush current to the circuit at the
time of connection. The maximal allowed in-rush current is determined by the properties
of the switching components and the design specifications, and its dependence on pADE
is complex and depends on the exact realization of the VIC. When the circuit is
connected below a certain lower limit pABC, a somewhat more complicated power-up
algorithm is required to deal with the slowly charging VIC (which causes the problem of
the descending inductor current, described below, to be more pronounced). In order to
comply with these requirements, a mechanism that senses the phase of the grid and
connects the circuit at a certain phase must be incorporated in the converter. There are
� %Ó
K
%L
��
VIC CHARGE
CONTROLLER
~ AC
LINE
%wx( �w
%d pÉ %wx(
VIC
�HIJ �R
% pd
p��w2W� 2W�w

34
several methods to realize this mechanism, and its realization is outside the scope of this
work, as are the algorithms for low-voltage (< pABC) power-up. We have found by
simulations that connecting our proposed circuit at a phase angle in the range 5° − 15° results in a stable power-up with a in-rush current less than 20A, which is acceptable for
most designs of 500W power supplies.
During power-up, there may be episodes where the slope of the descending
inductor current (as shown in Figure 5.2) xÔQ-LÑ is too low, and the rising pÉ may cause
the inductor current not to reach zero before changing the sign of the slope. To prevent
such episodes from damaging the power-up process, a protective logic should be
incorporated in the control of the boost converter. A proposed logic is to close the switch
of the boost converter when the inductor current starts rising (when supposed to be
descending), in addition to the case when %L hits zero. This would cause a secondary in-
rush current which will charge the VIC and the boost converter will resume normal
operation right afterwards as the descending slope of the inductor current will be steeper.
This logic should allow this additional trigger only when the inductor current is below a
certain limit ( xÔLÑ �w , either measured or calculated, can be used as a reference),
otherwise accidental activations of the switch would cause the current to rise on
undesired instances.
Since the VIC has no charge to begin with, it will operate in the first region (as
described in Section 3.2) until �] reaches �£,ADE . In our proposed controller, this is
implemented using PWM with a duty cycle of -u,ÝÞß-º»¼ . The feed-forward term of the
charge controller will provide the initial �w value for the control of the boost converter.
An initial value for the integrator in the PI charge controller should be set, in order to
avoid an overshoot in the input current subsequent to the power-up.
5.3. Simulation results
The VIC performance in the circuit from Figure 5.1 has been examined by
MATLAB simulations using the SimPowerSystems toolbox. The parameters of the VIC
(shown in Figure 3.4 and the sliding function (4.8)) are � = 0.002, � = 4μ©, �R =40μFand W = 60μH. From (4.12) and (4.14) we get �ABC ≈ 0.008 (this value strongly
depends on �ABC, which is chosen as �ABC = 395V ) and from (4.16) and (4.17) we get �¹ABC ≈ 0.002 (using 398 < � < 402). The sampling frequency of the VIC controller is
2MHz. The parameters of the VIC charge controller (shown in Figure 4) are }� = 2 ×

35
10Q.� , &� = 40ms , the initial value of the integrator is −0.05μs and the cut-off
frequency of the LPF is 10Hz ( o(n) = ..Pr] where & = 15.9ms). The boost converter
circuit parameters (shown in Figure 5.1) are �HIJ = 400V,K = 320Ω (thus, the power is
500W), WÐ = 60μH and �� = 100nF. The grid voltage pd has the amplitude pd,ADE =340V and the frequency Hz50 . The results are shown in Figure 5.4.
Fig. 5.4: Simulation results for a PFC boost converter using a VIC. Three grid
cycles are shown in steady state operation. All the signals shown, except for the
last (d), are filtered via a low-pass filter with a cut-off frequency of 1KHz, to
eliminate the ripple noise of the boost converter. (a) the converter input current ®ä; (b) the VIC input current ® (c) the voltage error Gåæç − G; (d) the VIC inner
capacitor voltage Gs, used as a measure of F.
0.5 0.51 0.52 0.53 0.54 0.55 0.56-4
-2
0
2
4
time [sec]
i in [
A]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
-1
0
1
time [sec]
i [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
0
1
2
time [sec]
Verr
or [
V]
0.5 0.51 0.52 0.53 0.54 0.55 0.56100
200
300
400
time [sec]
VS [
V]
(a)
(b)
(c)
(d)

36
Fig. 5.5: Simulation results for the power-up phase of the PFC boost converter
using a VIC. Only the first semi-cycle of the grid voltage is shown here. (a) the
converter input current ®ä; (b) the VIC input current ® (c) the output voltage G;
(d) the VIC inner capacitor voltage Gs, used as a measure of F.
The calculated total harmonic distortion (THD) of the input current %d (in the
range up to 4KHz) is less than 0.7%. (the signal %d was passed through an LPF prior to
THD calculation, as most standards take into account only the first 40 harmonics of the
grid frequency in THD calculation). The low frequency voltage ripple seen in Figure
5.4(c) is 1.63V. The capacitance of a conventional capacitor, if used to achieve the same
output voltage ripple instead of the VIC, would have been � = ���-��Ö = �.è�..é�∙�Õ∙.)) ≈2.65mF, more than 65 times larger than �R (we have denoted by %�� the peak-to-peak
variation of % , as observed in Figure 5.4(b), and similarly ��� is the peak-to-peak
variation of �). This ratio of 65 could be increased significantly if the DC/DC converter
were reversed, as mentioned in Chapter 3. Another way of greatly increasing this ratio
0 0.002 0.004 0.006 0.008 0.01
0
5
10
15
time [sec]
i in [A
]
0 0.002 0.004 0.006 0.008 0.01
-1
0
1
2
3
time [sec]
i [A
]
0 0.002 0.004 0.006 0.008 0.010
200
400
time [sec]
V [V
]
0 0.002 0.004 0.006 0.008 0.010
200
400
time [sec]
VS [V
]
(a)
(b)
(c)
(d)

37
(hence, lowering the ripple significantly) is by using more complex sliding functions in
the controller of the VIC is portrayed in the next section.
The power-up process of the converter is shown in Figure 5.5. Several episodes of
in-rush current occur in the first 2 milliseconds, for reasons explained in the previous
Section. In order to prevent the secondary in-rush current episodes, a sufficient charge
would have to be absorbed by the VIC during the initial in-rush current. This would
require connecting the circuit to the grid during the peak voltage, and applying an in-rush
current in order of 100A. An in-rush current of this magnitude would require less-than-
optimal switching components, and would render the circuit impractical.
Fig. 5.6: Simulation results for an output power change from 250W to 500W in a
PFC boost converter using a VIC. Three grid cycles are shown and the power
change occurs at 0.525 sec. The signals (a), (c), (d) are filtered via a low-pass
filter with a cut-off frequency of 1KHz, to eliminate the ripple noise of the boost
converter. (a) the converter input current ®ä; (b) the converter output current
®Ø�× ; (c) the VIC input current ®; (d) the voltage error Gåæç − G; (e) the VIC
inner capacitor voltage Gs, used as a measure of F.
0.5 0.51 0.52 0.53 0.54 0.55 0.56-4-2024
time [sec]
i g [
A]
0.5 0.51 0.52 0.53 0.54 0.55 0.560
0.5
1
1.5
time [sec]
i out [
A]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
-1
0
1
time [sec]
i [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
0
1
2
time [sec]
Verr
or [
V]
0.5 0.51 0.52 0.53 0.54 0.55 0.56100
200
300
400
time [sec]
VS [
V]
(a)
(b)
(c)
(d)
(e)

38
The circuit does not exhibit PFC properties during the power-up stage. Since �w is
not constant during the power-up phase, the shape of the input current is not sinusoidal.
Starting from the second grid semi-cycle, �w will be set constant during each semi-
cycle, to allow a small THD. As described in Section 3.2, in the first region of operation
of the VIC (when the charge is less than ���), the VIC operates at a constant PWM
duty cycle N = -u,ÝÞß-º»¼ . Since �R.ABC = 100�, the duty cycle would be N = 25%. The
VIC enters the second region when � = 400�, which would correspond to �R ≥ �R,ABC.
Fig. 5.7: Simulation results for an output power change from 500W to 250W in a
PFC boost converter using a VIC. Three grid cycles are shown and the power
change occurs at 0.525 sec. The meaning of all the signals is as in Figure 5.6.
0.5 0.51 0.52 0.53 0.54 0.55 0.56-4-2024
time [sec]
i g [
A]
0.5 0.51 0.52 0.53 0.54 0.55 0.560
0.5
1
1.5
time [sec]
i ou
t [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
-1
0
1
time [sec]
i [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
0
1
2
time [sec]
Verr
or [
V]
0.5 0.51 0.52 0.53 0.54 0.55 0.56100
200
300
400
time [sec]
VS [
V]
(a)
(b)
(c)
(d)
(e)

39
Figures 5.6 and 5.7 demonstrate the stability of the output voltage during increases
or decreases of the output power, respectively. Upon reaching stability, as in Figure 5.4,
the load power changes at 0.525 seconds from 250W to 500W or vice versa. The input
current during the semi-cycle in which the power change occurs does not keep a
sinusoidal form, as �w must be changed in order to keep the VIC within the flat
operating region, as described in the previous section.
5.4. An improvement – integral sliding mode control
As we have seen, small perturbations of the output voltage � still remain in a PFC
regulated by the VIC. Since the VIC is a third-order system (equation (4.6)), and the
sliding mode controller is a second-order controller (equation (4.8)), we can try
improving the steady state performance by increasing the order of the controller. This
practice is advised in [10, Ch. 1] and in practical design guides such as [40], especially if
a fixed-frequency SMC is employed (which is the case in our implementation). This kind
of full order SMC is called Integral Sliding Mode (ISM) by Utkin and Shi [43] and in
[10, Ch. 1], but we do not follow their approach, since it requires a non-singular state
dependent input matrix, which is not our case (see (4.6)). Instead, we add a simple
integrator of the output voltage error to the sliding function �(�) (following [40]). The
improved sliding function will be
� = �HIJ − � − �(�HIJ ∙ % − �R ∙ %R) + �ì5 (�HIJ − �)'&() , (5.6)
where �ì > 0 is a second sliding coefficient. Since the implementation of the controller
is discrete, the integral is replaced by an appropriate summation.
As a result of the increased order, the existence condition of the sliding mode will
become a complex relation between � and �ì. Although it is possible to formulate this
relation analytically and use numerical methods to find the domain where the existence
condition holds, it is more practical to use the � appropriate for the second order sliding
function (4.8), and a small �ì that would not greatly influence the existence condition.
The hitting condition is not a concern in our implementation, since the reaching phase is
done using a constant PWM and not SMC, as explained in Section 5.2.
The performance of the VIC with the improved sliding function (5.6) is shown in
Figure 5.8. In this simulation, the sliding coefficients were � = 0.008, �ì = 200,000 (a

40
discrete form of the integration in (5.6) was implemented, using the Euler backward
method, i.e., í = íQ. + �îÅ (�HIJ − �) where í is the integration variable, and \] is the
sampling time). All other parameters were as in the previous section. As seen in the
simulation results, this controller indeed provides a significant improvement in the
steady state error, with a low-frequency output voltage ripple of about 50mV, in
comparison to 1.63V using the sliding function (4.6). The THD of %d is not changed by
much, with a value of 0.72%.
Fig. 5.8: Simulation results for a PFC boost converter using a VIC with the
improved full order sliding function (5.6). Three grid cycles are shown in steady
state operation. The signals (except Gs ) pass through an LPF with cut-off
frequency of 1kHz. This filter is insufficient to smooth he signal GæååØå = Gïðñ − G
in this scale, yet it is evident that the low frequency ripple is in order of 50mV.
The meaning of all the signals is as in Figure 5.4.
0.5 0.51 0.52 0.53 0.54 0.55 0.56-4
-2
0
2
4
time [sec]
i g [
A]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
-1
0
1
2
time [sec]
i [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56-0.05
0
0.05
time [sec]
Verr
or [
V]
0.5 0.51 0.52 0.53 0.54 0.55 0.56100
200
300
400
time [sec]
VS [
V]
(a)
(b)
(c)
(d)

41
6. Zero-voltage-switching (ZVS) in a PFC and a VIC
6.1. Overview of ZVS and motivation
Much of the power losses in a switched-mode power supply are due to the high-
frequency switching of the MOSFET in the PFC boost converter. This is demonstrated
by an estimation of the boost converter switching losses in our example circuit. Due to
the relatively small inductor chosen for our circuit, the average switching frequency is
high, about 430kHz. The method of power losses calculation is portrayed in [14], and
the switching component used in this calculation are the MOSFET IPP60R250CP and
the Schottky diode IDH10G65C5 by Infineon [21], [22]. This MOSFET was chosen to
have fast switching times and a small output capacitance. A silicon-carbide Schottky
diode was chosen in order to avoid the reverse recovery time of p-n junction diodes,
which is in the order of 100ns. Commonly, the most prominent factors contributing to the switching losses are:
(1) the power lost during the overlapping of the MOSFET current curve and the voltage
across it during transition, (2) the dissipation of the charge stored in the parasitic parallel
capacitance of the MOSFET during switching on, and (3) the dissipation of the reverse
recovery charge in each diode (with body diodes or switching diodes present in the
circuit) due to recombination of the minority carriers in the diode when it is turned off, or
in the case of a Schottky diode, which does not possess the reverse recovery effect,
dissipation of the charge stored in the parallel capacitance when the diode is turned on.
In the case of critical conduction mode switching, the MOSFET is switched on
when the current reaches zero. Hence, in each switching cycle the energy lost in the
switching on process is the energy stored in the parasitic parallel capacitance �w]] =0.5nF [21] alone, hence
4w = 12�w]]��. The energy lost during switching off of the MOSFET is
4wòò = 5 pÓR(�)%ÓR(�)'�(ÔóP(ô)
+ .��+� = %LÝõö� �Éx + �ò2 + .��+�, (6.1)
where: %LÝõö ≈ 2%d is the maximum inductor current in the cycle; �ò = 12nsec is the
current fall time of the MOSFET [21]; �Éx is the rise time of the voltage and �+ = 15nC

42
is the charge stored in the parallel capacitance of the diode [22]. The gate current
%ù = − -�úûüýûóþ� must discharge the gate-drain capacitance, where Kù = 1.3Ω is the gate
resistance and ����(��x = 5V is the gate Miller plateau voltage [14]. Hence,
�Éx = �ùÓ�òò�Kù����(��x , (6.2)
where �ùÓ�òò ≈ 350pF is the effective gate-drain capacitance, estimated from the
�ÓR − �ùÓ diagram [21].
Substituting (6.2) into (6.1), multiplying by the switching frequency �R� and
averaging �%d� over one grid period to achieve an average power loss, we obtain:
�R� = �R�(4w + 4wòò) = 12�R�� ¶�w]]� + �+ + 2Ud� ´�ò + �ùÓ�òò�Kù����(��x µ·. (6.3)
The average of the absolute value input current of the circuit in Chapter 5, when
operating at 500W, is Ud� = 1.88A. Using this value, the frequency �R� = 430kHz and
the MOSFET parameters, from (6.3) we obtain �R� = 32.85W, which leads to a 6.57%
decrease in the efficiency of the converter. Since the switching losses are proportional to
the drain-source voltage during switching (� in our case so far), a method of reducing
this voltage at the moment of switching would considerably increase the converter
efficiency. Such methods are referred to as zero-voltage-switching (ZVS).
In addition to reducing the power losses of the converter, ZVS has the following
advantages [2]:
1. Reduced electromagnetic interference at transitions due to smaller voltage
derivatives.
2. Reduced gate drive requirements (no Miller effect).
Often, we c make use of the parasitic capacitance of the switch to create the ZVS effect.
The increase of the switching frequency AC component of the current in both
switched and passive parts of the converter is an important disadvantage of ZVS, which
causes a higher overall conduction loss. As the switching frequency rises, the trade-off is
biased towards implementing ZVS, but a careful loss analysis should be performed if the
benefit is not clear. An outline of this analysis appears in [17].
Various methods of ZVS have been investigated since Lee and Liu [28] presented
the idea in 1986 as a new family of resonant switches (previously invented by the same

43
authors for zero-current switching). An early variant of the original method was
proposed by Henze, Martin and Parsley [17], where a composite switch with an anti-
parallel diode and a capacitor is introduced. All power MOSFET and IGBT devices, by
construction, include such parallel components, which in most cases simplifies the
implementation of the ZVS method of [17]. A similar method to that proposed by Henze
et al. is used in our proposed circuit. Other common ZVS techniques include the Multi-
Resonant Converter (MRC) invented by Tabisz and Lee [39], the Quasi-Square wave
Converter (QSC) invented by Vorperian [44], the Zero-Voltage-Transition method by
Hua et al. [19], zero-current-switching-zero-voltage-switching by Lin and Lee [26],
transformer assisted techniques [3, 48] and more.
6.2. The proposed circuit
We observe the waveforms of the non zero-voltage switching boost converter from
Figure 5.1, shown in Figure 6.1. The switch is switched off at zero voltage, but switched
on when the voltage is �� = �, which is the high output voltage of the converter. In
accordance with the resonant zero-voltage switching methods mentioned above [17], we
wish to discharge the parallel capacitance of the PFC switch (the capacitor is not shown
in Figure 5.1, but present in every implementation of the switch) before switching it on.
This would require having a sufficient inverse current %L on the inductor, which is
impossible due to the forward diode in the circuit. For this reason, we replace this diode
with an n-channel MOSFET with a body diode being exactly the diode in the circuit
(shown in Figure 6.2 as �2). When the inductor current %L reaches zero, we keep �2 "on"
for a little more time, which causes %L < 0 (see Figure 6.3). When a sufficient negative
current %�d is reached, �2 is switched off, so that the negative current will discharge the
capacitance of �1(which is also "off") and an additional parallel capacitor (which may
be needed to limit the slope of the voltage when switching off �1), shown together in
Figure 6.2 as �.. This is a resonant discharge, which ends when the voltage �� reaches
zero, then �1 is switched on with a negligible loss.

44
Fig. 6.1: The waveforms of the inductor current ®Ú and the voltage G in a non
zero-voltage switching boost converter (shown in Figure 5.1). The switch is closed
at time ½, when the voltage across it is G (the high voltage at the output of the
converter). The small parallel capacitance of the switch causes a steep rise of G
at time ×ØÙ. Note the abrupt fall of G at time ½, as a very high current flows
through the switch which discharges the capacitance.
Since we added an additional switch �2, we must also make sure it works in a zero-
voltage switching regime. Fortunately this is an easier task than the switching of �1, as %L
is in the right direction to charge �. after �1 is switched off. The charging will stop when
the body diode of �2 starts conducting at �� ≈ �. This will cause the voltage across �2 to
be almost zero, and from that time until the reversal of the direction of %L it can be
switched on at ZVS conditions. Since this resonant charge is driven by the maximal
inductor current, it is a very short event, and will be neglected in our analysis below. The
current waveform during this time will be approximated by a descending linear slope
xÔQ-LÑ which corresponds with the next stage, when �2 (or its body diode) is conducting.
%L
��
�
� �w \
2UlLÏ
�
0
0

45
Fig. 6.2: A Zero-voltage-switching version of the boost converter from Figure 5.1,
also showing the VIC. The controllers, rectifying bridge and the load are not
shown. When st is held open and Y� is only the parasitic capacitance of s�, this
circuit is equivalent to the circuit in Figure 5.1, as the body diode of s� is implicit
in any implementation of the switch in Figure 5.1.
The main practical difficulty in implementing the above zero-voltage switching
method to our circuit, is determining the proper �w (defined as the duration when �1is
"on", see Figure 6.3) that causes the required average current %L∗ to be the same as in the
average model of the non ZVS PFC from Figure 5.3. We rewrite (5.1), the relation for
the non ZVS circuit from the previous chapter, using an alternative notation
%L∗ = pÉ2WÐ �w, (6.4)
where �w is the output of the VIC charge controller, which corresponds to �w(n) in
(5.4), and is constant during each semi-cycle of the grid, and %L∗ is the resulting (desired)
average inductor current. In order to retain the average model of the converter shown in
Figure 5.3, we need to obtain an expression for the actual average current UlLÏ(�w) and
keep it equal to the desired current %L∗ . To obtain this, �w (as a function of �w, which we
ought to find) must vary during the grid semi-cycle in order to compensate for the
variations in the duration of the resonant discharge. (In this chapter, we sometimes refer
to this �w as the "adjusted" �w, distinguished from the "unadjusted" �w of Chapter 5.)
�
/��
WÐ
VIC
/MÐ
�.
�2
�1
��
�HIJ �R
%Ó %L %wx( %
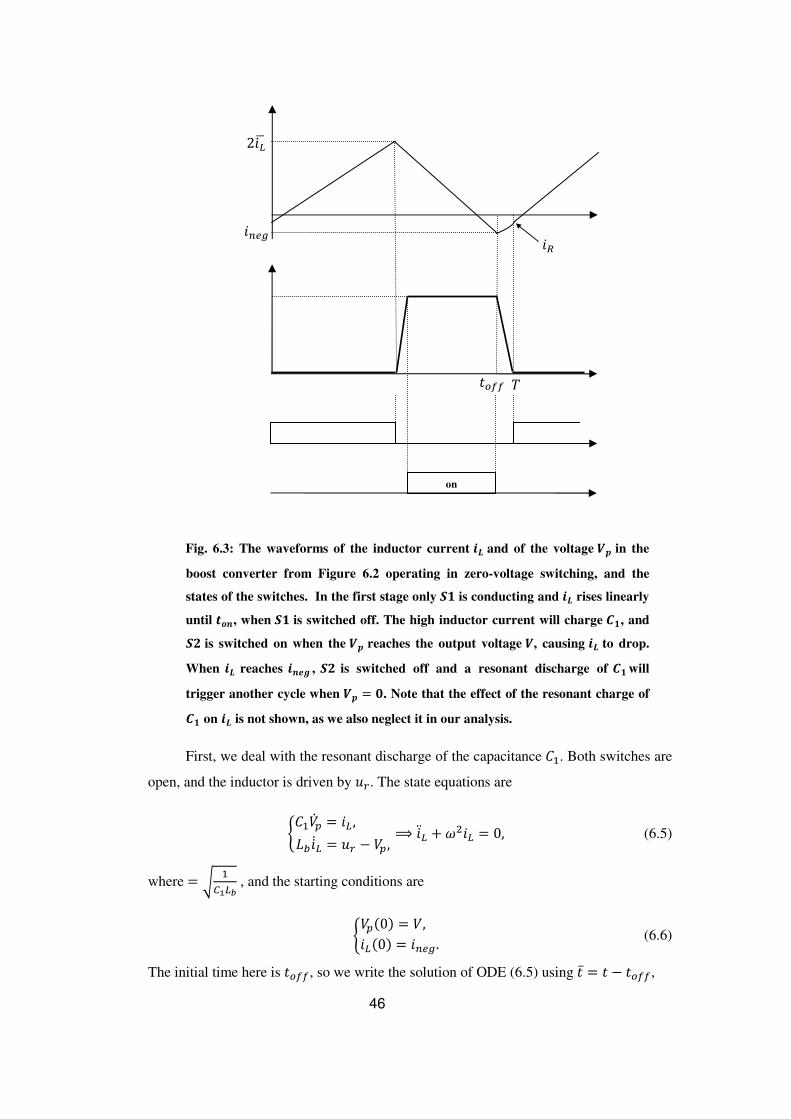
46
Fig. 6.3: The waveforms of the inductor current ®Ú and of the voltage G in the
boost converter from Figure 6.2 operating in zero-voltage switching, and the
states of the switches. In the first stage only s� is conducting and ®Ú rises linearly
until ×ØÙ, when s� is switched off. The high inductor current will charge Y�, and st is switched on when the G reaches the output voltage G, causing ®Ú to drop.
When ®Ú reaches ®Ùæä , st is switched off and a resonant discharge of Y� will
trigger another cycle when G = �. Note that the effect of the resonant charge of
Y� on ®Ú is not shown, as we also neglect it in our analysis.
First, we deal with the resonant discharge of the capacitance �.. Both switches are
open, and the inductor is driven by pÉ. The state equations are
��.�l� = %L ,WÐUllL = pÉ − ��, 1 ⟹ Ul§L +c�%L = 0, (6.5)
where = � .�7LÑ , and the starting conditions are
���(0) = �,%L(0) = %�d.1 (6.6)
The initial time here is �wòò, so we write the solution of ODE (6.5) using � = � − �wòò,
\
2UlLÏ
2UlLÏ
�wòò
%�d
on
%þ

47
�%L = Î sin(c�) + cos(c�),�� = pÉ −cWÐÎcos(c�) + cWÐ sin(c�).1 Applying the initial conditions (6.6) to the above solution we get
Î = (pÉ − �)v�.WÐ , = %�d, hence,
�����%L = (pÉ − �)v�.WÐ sin(c�) + %�d cos(c�),�� = pÉ − (pÉ − �) cos(c�) + vWÐ�. %�d sin(c�).
1 (6.7)
(6.8)
The duration of the resonant discharge Δ�þ = \ − �wòò can be found from (6.8), by
solving for �� = 0. Through some algebraic calculations, denoting À�d = �LÑ�7 %�d� and
� = xÔgQxÔ-P��ýi���ýig Q�xÔ-P-g��ýig P(xÔQ-)g we obtain
Δ�þ = 1c cosQ.(�). (6.9)
The inductor current at the end of the resonant discharge, %þ, (see Figure 6.3) can be
found by substituting (6.9) for � in (6.7), obtaining
%þ = (pÉ − �)v�.WÐ �1 − �� + %�d�. (6.10)
Next, we find the duration of the descending part of the inductor current Δ�wòò = �wòò −�w using a linear relation with a slope
xÔQ-LÑ , hence,
Δ�wòò = WÐpÉ − � ~%�d − %þ − pÉWÐ �w�. (6.11)
Now, the average inductor current UlLÏ can be expressed as
UlLÏ = $ %L(�)'�Å) \ = �w + �wòò + �þ�w + Δ�wòò + Δ�þ, (6.12)
where �w is the charge flowing through the inductor until �w, �wòò is the charge
flowing from �w to �wòò and �þ is the charge flowing from �wòò to \.

48
�w can easily be calculated by integrating the rising inductor current:
�w = 5 ~pÉ�WÐ + %þ�'� = pÉ�w�2WÐ + %þ�w(Ò�) . (6.13)
By integrating the falling inductor current and substituting (6.11) we obtain:
�wòò = 5 ~pÉ − �WÐ � + pÉ�wWÐ + %þ�'��(Òôô)
= 12(pÉ − �) ¶WÐ %�d� − %þ�� − 2%þpÉ�w − pÉ��w�WÐ ·. (6.14)
Likewise, �þ is obtained by integrating (6.7) and substituting (6.9):
�þ = 5 �(pÉ − �)v�.WÐ sin(c�) + %�d cos(c�)��(�) '�
= (pÉ − �)�.(1 − �) + %�d��.WÐ(1 − ��).
(6.15)
Substituting the charges from (6.13-6.15), Δ�wòò from (6.11) and Δ�þ from (6.9) into
(6.12), we obtain after some algebraic manipulation:
UlLÏ= � �xÔ(Ò�g�LÑ + %þ�w� − LÑ� %�d� − %þ�� − (pÉ − �)��.(1 − �) − (pÉ − �)%�d��.WÐ(1 − ��)
��w − WÐ %�d − %þ� − (pÉ − �)��.WÐ cosQ.(�) . We substitute the above expression in (6.1), and solve the resulting equation to obtain
�w = �w2 − WÐ%þpÉ +v´�w2 − WÐ%þpÉ µ� − WÐpÉ� 4(�w), (6.16)
where
4(�w) = pÉ %�d − %þ��w − 2(pÉ − �)��.(1 − �) − WÐ %�d� − %þ��+ (pÉ − �)��.WÐ ~pÉWÐ �w cosQ.(�) − 2%�d�1 − ���.
The sign before the square root in (6.16) is positive, as at the limit �. → 0, %�d →0, %þ → 0 we require �w = �w (as in the non ZVS case). In practice, the real-time
calculation of �w from (6.16) in order to control a PFC is a demanding task. A linear
approximation of �w in the form

49
�w ≈ &(pÉ) + �(pÉ)�w, where &(pÉ) and �(pÉ) are pre-calculated coefficients, can be used to achieve very good
results. When comparing the approximated �w with the exact values of (6.16) in the
range 0.4μs − 4μs, we obtain an RMS error of 0.42ns and a maximal error of 2.3ns. In
addition, a discretization error should be taken into account as the look-up table
containing the coefficients is limited in size.
Operating Condition
The proper operation of the zero-voltage switching algorithm depends on the
negative inductor current which depletes the capacitance �. and drives �� to zero. In
order to obtain the conditions required for the above, we verify that the time Δ�þ from
(6.9) exists and is finite. We recall the argument of the arc-cosine in (6.9),
� = pÉ� − pÉ� + À�d�À�d� − 2pÉ� + ��À�d� + (pÉ − �)� .
First, the expression inside the square root must be non-negative, hence
À�d� ≥ �(2pÉ − �). (6.17)
Now we search for the minimal value of À�d that satisfies −1 O � O 1, the domain of
the arc-cosine (recall that À�d is proportional to %�d. We want to minimize the required
negative current since it causes conduction losses, therefore the higher values of À�d are
less significant). Since À�d, �, pÉ ∈ ℝP, we examine (6.17) under two cases:
1) pÉ O -� :
The inequality (6.17) is always true, and the minimal À�d which satisfies it is
À�d = 0. In this case, � = xÔxÔQ- satisfies −1 O � O 0, and no additional condition
is required.
2) pÉ > -� :
In this case time the inequality (6.17) becomes the operating condition that ensures
that �� falls to 0�. The minimal À�d is À�d� = �(2pÉ − �), thus � = xÔQ-xÔ which
satisfies −1 O � O 1 as required.
For example, for � = 400V, pÉ(ADE) = 340Vwe get (from case 2) À�d(ABC) ≈ 335V.
Using WÐ = 60μHand �. = 1.5nF, we obtain %�d(ADE) = −1.675A .

50
6.3. Simulation results of a ZVS PFC
The performance of the zero-voltage switching circuit from Figure 6.2 as part of
the PFC presented in the previous chapter has been examined in MATLAB simulations
using the SimPowerSystems toolbox. The parameters of the VIC are the same as in the
previous chapter. The parameters of the VIC charge controller (shown in Figure 3.5) are }� = 2 × 10Q.�, &� = 40ms, the initial value of the integrator is −0.075μs and the cut-
off frequency of the LPF is 20Hz ( o(n) = ..Pr] where & = 8ms). The parameters of the
PFC circuit (shown in Figures 5.1 and 6.2) are �HIJ = 400V,K = 320Ω (hence, the
power is 500W), WÐ = 60μH , �� = 100nF and �. = 1.5nF . The grid voltage is the
same as in the previous chapter. We have chosen %�d proportional to the voltage pÉ,
with a proportion constant }�d = −5mΩQ., which corresponds to a maximal %�d =−1.675A for the maximal pÉ (as calculated in the end of the previous section). The
results are shown in Figure 6.4.
The calculated total harmonic distortion (THD) of the input current %d (in the
range up to 4KHz) is about 9.2%. The low frequency voltage ripple seen in Figure 6.4(c)
is 2.08V peak-to-peak. A significantly lower ripple can be achieved by using the
integrating sliding function demonstrated in Chapter 5.4. Since �w , as calculated by
equation (6.16), has a component that divides by pÉ, it tends to infinity when pÉ → 0V.
Therefore, the adjusted �w must be limited by a saturation value, that we choose to be �w(ADE) = 50μs (no optimization was performed on this value). The higher THD than
that of the non-ZVS circuit and the small deviations from a sinusoidal waveform seen in
the zero-crossings of the current in Figure 6.4(a) are a result of the inability to accurately
reconstruct the desired sinusoidal average input current in low pÉ (near the zero-
crossings) due to the asymptote of �w . A better THD may be attainable if a tighter
(higher, and not proportional to pÉ) %�d is used, and if the capacitance �. is reduced (by
disconnecting any parallel capacitor) when pÉ is low. Some PFC methods can be
adjusted to mitigate this problem, such as a Frequency Clamped Critical conduction
Mode (FCCrM) [32], but this is not covered in this thesis.

51
Fig. 6.4: Simulation results for a zero-voltage switching PFC using a VIC. Three
grid cycles are shown in steady state operation. All the signals shown, except for
the last (d), are filtered via a low-pass filter with a cut-off frequency of 1KHz, to
eliminate the ripple noise of the boost converter. (a) the converter input current ®ä; (b) the VIC input current ®; (c) the voltage error Gïðñ − G; (d) the VIC inner
capacitor voltage Gs, used as a measure of F.
The power-up process of the converter is shown in Figure 6.5. A single episode of
in-rush current occurs during the first 5 microseconds. In contrast with the non-zero-
voltage switching circuit, there are no secondary in-rush episodes. That is since the
adjusted �w is greater than the unadjusted �w at the beginning of each semi-cycle,
which causes a greater inductor current that in turn causes a greater current to charge the
VIC (compare Figure 6.5(b) and Figure 5.5(b)). As in the non-ZVS version, this circuit
does not exhibit PFC properties during the power-up stage since �w is not constant.
0.5 0.51 0.52 0.53 0.54 0.55 0.56-4
-2
0
2
4
time [sec]
i g [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
-1
0
1
time [sec]
i [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
0
1
2
time [sec]
Verr
or [
V]
0.5 0.51 0.52 0.53 0.54 0.55 0.56100
200
300
400
time [sec]
VS [V
](a)
(b)
(c)
(d)

52
Fig. 6.5: Simulation results for the power-up phase of the ZVS PFC using a VIC.
Only the first semi-cycle of the grid voltage is shown here. (a) the converter input
current ®ä; (b) the VIC input current ®; (c) the output voltage G; (d) the VIC
inner capacitor voltage Gs, used as a measure of F.
Figure 6.6 shows the stability of the output voltage during an increase and a decrease of
the output power. Upon reaching stability, as in Figure 6.4, the load power changes at
0.515 seconds from 250W to 500W and back to 250W at 0.545 seconds. The input
current during the semi-cycle in which the power change occurs does not retain a
sinusoidal form, since �w must be changed in order to keep the VIC within the flat
operating region, as described in the previous chapter.
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01
0
5
10
15
time [sec]
i g [
A]
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01
-1
0
1
2
3
time [sec]
i [A
]
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
200
400
time [sec]
V [
V]
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.010
200
400
time [sec]
VS [
V]
(a)
(b)
(c)
(d)

53
Fig. 6.6: Simulation results for an output power changes in a ZVS PFC using a
VIC. At time 0.515sec the power changes from 250W to 500W, and at time
0.545sec it changes back to 250W. Three grid cycles are shown. The signals (a),
(c), (d) are filtered via a low-pass filter with a cut-off frequency of 1KHz, to
eliminate the ripple noise of the boost converter. (a) the converter input current ®ä; (b) the converter output current ®Ø�× ; (c) the VIC input current ®; (d) the
voltage error Gåæç − G; (e) the VIC inner capacitor voltage Gs, used as a measure
of F.
6.4. ZVS implementation of the VIC
In order to be a proper replacement for a large capacitor and not significantly
reduce the overall efficiency of the circuit using it, any implementation of the VIC must
be extremely efficient, and not cause power losses that are much greater than the losses
in the ESR of an equivalent electrolytic capacitor. Since the VIC must operate in a very
high switching frequency (several hundred kHz), the switching losses of the
0.5 0.51 0.52 0.53 0.54 0.55 0.56-4-2024
time [sec]i g
[A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.560
0.5
1
1.5
time [sec]
i ou
t [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
-101
time [sec]
i [A
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56
0
1
2
time [sec]
Ve
rro
r [V
]
0.5 0.51 0.52 0.53 0.54 0.55 0.56100
200
300
400
time [sec]
VS
[V
]
(a)
(b)
(c)
(d)
(e)

implementation presented in Chapter 4
calculations from the beginning of this chapter,
each switching, one MOSFET is turned on (which also discharges its parallel capacitance �w]]) and the other is turned off. We assume that the parallel diodes do not conduc
no reverse recovery current contributes to the power loss. For ease of calc
roughly approximate �]voltage on each MOSFET is the same
(two switchings of each MOSFET)
MOSFET chosen in Section 6.1
4]� =where U = 1.8A (see Chapter 5) is the average of the absolute valu
the switching time (obtained from simulation)
�É = 17nsec is the current rise time [
(similarly to (6.2)). Since the switching frequency is
estimated switching power loss would be
Fig 6.7: A realization of a
capacitance of the switches,
voltage on the lower switch.
In order to reduce the switching losses, we need t
was done for the PFC stage.
switches, ��, shown in Figure 6.7.
can be implemented, if we can con
control the average inductor current
operating in critical mode is shown in Figure 6.8. Note
%
_
C
+
�
54
implementation presented in Chapter 4 are expected to be high. Following our
the beginning of this chapter, we can estimate the switching losses
each switching, one MOSFET is turned on (which also discharges its parallel capacitance
) and the other is turned off. We assume that the parallel diodes do not conduc
no reverse recovery current contributes to the power loss. For ease of calc
to be 200V and neglect the voltage drop on the inductor
voltage on each MOSFET is the same. Hence, the energy loss in each
(two switchings of each MOSFET), under the condition given in Section 5.3 and the
MOSFET chosen in Section 6.1 is
�w]]�]� T U�] �Éx T �ò T �òx T �É� 39.8μJ, (see Chapter 5) is the average of the absolute value of the VIC current
the switching time (obtained from simulation), �Éx, �ò are the same as in Section 6.1,
is the current rise time [21] and �òx 18nsec is the voltage fall time
Since the switching frequency is �] 246kHz (see Figure 4.6), the
switching power loss would be �]� 4]��] Ê 9.8W.
realization of a VIC, showing the parallel parasitic
capacitance of the switches, Y (compare Figure 3.4). � denotes the
voltage on the lower switch.
In order to reduce the switching losses, we need to implement a ZVS algorithm, as
for the PFC stage. In ZVS, we make use of the parasitic capacitance of the
, shown in Figure 6.7. A similar technique to that described in Section 6.2
can be implemented, if we can control the VIC in a critical mode, which
inductor current %] of the VIC. An average model of the VIC
operating in critical mode is shown in Figure 6.8. Note that it is different than the
%�
/M
/
í
�� W
�� �R �R %R
�.
��
be high. Following our
n estimate the switching losses. On
each switching, one MOSFET is turned on (which also discharges its parallel capacitance
) and the other is turned off. We assume that the parallel diodes do not conduct, so
no reverse recovery current contributes to the power loss. For ease of calculation, we
n the inductor, so the
in each switching cycle
, under the condition given in Section 5.3 and the
e of the VIC current at
are the same as in Section 6.1,
is the voltage fall time
(see Figure 4.6), the
parallel parasitic
denotes the
o implement a ZVS algorithm, as
In ZVS, we make use of the parasitic capacitance of the
A similar technique to that described in Section 6.2
critical mode, which allows us to
An average model of the VIC
it is different than the

55
average model shown in Figure 4.4, since the switching frequency in not constant. The
state equations of the average model are
��l % −
�]�%],
�]�l] %].
(6.18a)
(6.18b)
Note that %] is now the controlled variable, instead of a state variable as in the constant
frequency state equations (4.4) or in the exact model equations (4.6). % is the input of the
system, and in our case approximately a sinusoidal signal of twice the grid frequency.
Fig 6.8: An average model of the VIC, operating in critical control mode.
(Compare Figure 4.4 for the average model of the VIC in constant
switching, and Figure 5.3 for the average model of the PFC in critical
control.)
As a first choice, we would like to control %] in a way that mimics the sliding
mode control presented in Chapter 4. A PWM control with a constant duty cycle can be
used to charge the VIC to � �HIJ, and starting from that time we assume that the
system states are near the sliding surface �(�) = 0, and rewrite (4.15) as
%] � � �HIJ T ��HIJ%��] . (6.19)
Another choice of %] can be derived directly from the state equations (6.18). We define a
new input %]�] , the error � �HIJ � �, and rewrite (6.18a) as
��l 1�É�ò T � p � %. (6.20)
We seek an input p that causes � to converge to 0 irrespectively of the current % (which
may be regarded as a disturbance). If we choose p �% � ���� , with � > 0, equation
(6.20) becomes �l ���, which is convergent. The corresponding control in terms of %] is very similar to (6.19), in particular when � → 0:
%]
%
_
%�
�] �
�] +
�
�%� �]%]

56
%] � � �HIJ T ��%��] . (6.21)
Substituting (6.21) into the state equations (6.18b), we obtain a set of differential
equations
��l � ��� ,�]�l] ��% − ���] ,
(6.22a)
(6.22b)
We observe that the first equation (6.22a) is decoupled from the second (independent of
�]), and stable as designed by our choice of p. The second equation (6.22b) with � 0
becomes
12� ''� (�]�) = �%, which means that the derivative of the stored energy equals the flow of the power into
the VIC.
The implementation of the critical conduction mode controller of the VIC using U] (the average value of %] over one switching cycle), determined by either (6.19) or (6.21),
requires us to take a different approach than used in Section 5.2 for the PFC control,
since U] may take either positive or negative values. Hence, we control either the duration
of the rising current if U] > 0, or the duration of the falling current if U] ? 0 (denoted �w
in both cases). Typical waveforms of %], í and the state of the switches are shown in
Figure 6.9. From simple calculations, we get:
�w 2W� − �] U]forU] ≥ 0,�w � 2W�] U]forU] < 0.
(6.23a)
(6.23b)
We explain the positive U] switching cycle, which is symmetrical to the negative case:
when / 1 the current %] rises for a duration �w which is calculated from (6.23). �.is
then turned off, and the voltage í drops to zero in resonant conditions driven by a
positively high %]. When í 0, �� is switched on (in ZVS conditions) and %] starts to
drop. When %] reaches zero, the desired average current U] is calculated using (6.19) or
(6.21), the controller decides if the next switching cycle is a positive "triangle" or a
negative one, and chooses �w accordingly. If the next cycle is a negative one, it starts at
that time with a falling %], otherwise �� is switched off and the resonant charge of its

57
capacitance causes í to reach �, and another switching cycle starts. We do not correct
�w based on the duration of the resonant stages, as we do in the ZVS control of the PFC
(see Chapter 6.2), since the errors that are caused by this inaccuracy can be adequately
corrected as shown later in this chapter.
Fig. 6.9: The waveforms of the inductor current ®" and the voltage � in a
VIC controlled in a critical conduction mode, showing the state of the
switches. ½ denotes the end of each switching cycle, and the start of a
new counting towards ×ØÙ. The first two switching cycles are positive,
while the third is a negative one. Note that ×ØÙ determines the duration of
the "on" state of s� for a positive triangle, and of st for a negative one.
Simulation results of the ZVS PFC that was introduced in Chapter 6.3, with a ZVS
VIC operating in critical conduction mode, are shown in Figure 6.10. The critical
conduction mode controller uses equation (6.21) to determine U], with � = 0.004. All the
conditions of the simulation are as in Chapter 6.3, and the capacitors �� 0.5nF. The
calculated switching loss is less than 0.1W (using the method explained in the beginning
of this section), and the conduction loss is about 1.25W. Switching losses occur when the
current %] during the resonant stage is not high enough for driving í to 0 (or to �), which
%]
%L
í
��
� �
�w
�\
�
�
� �� �
�.
�1��
�2
on on
on
0
0
0
0
on
�w �w \ � �
\
on

58
forces a non-zero-voltage switching. The simulated RMS of the error in � (low-pass
filtered at 1kHz) is 0.52V, and the peak-to-peak ripple is 1.67V.
Fig. 6.10: Simulation results for a PFC using a ZVS VIC with the critical
conduction mode controller (6.21). Three grid cycles are shown in steady state
operation. The signals (except Gs) pass through an LPF with cut-off frequency of
1kHz. The low frequency ripple is 1.67V peak-to-peak. The meaning of all the
signals is as in Figure 5.4.
We now consider a model that takes into account the imperfections in generating
the current %] , due to the complexity of generating the exact positive and negative
triangles and the presence of transients. We examine a third controller, based on the
integral sliding function (5.6), including the noise #:
%] = ��] ´% − �2$c� − �c�5 �(�)'�() µ + #, (6.24)
0.12 0.13 0.14 0.15 0.16 0.17 0.18-4
-2
0
2
4
time [sec]
i g [
A]
0.12 0.13 0.14 0.15 0.16 0.17 0.18
-1
0
1
time [sec]
i [A
]
0.12 0.13 0.14 0.15 0.16 0.17 0.18
-1
-0.5
0
0.5
1
time [sec]
Verr
or [
V]
0.12 0.13 0.14 0.15 0.16 0.17 0.18100
200
300
400
time [sec]
Vs [
V]
(a)
(b)
(c)
(d)

59
where $ and c are control constants (which relate to �, �ì from (5.6)). Substituting
(6.24) in (6.18), we obtain the closed loop system
��l = �2$c� + �c�5 �(�)'�() + �]� #,
�]�l] = ��] ´% − �2$c� − �c�5 �(�)'�() µ + #,
or equivalently,
�l + 2$c� + c�5 �(�)'�() = − �]�� #,
� ''� (�]�) = 2� ´% − �2$c� − �c�5 �(�)'�() µ + �]#.
(6.25a)
(6.25b)
If we denote c = − -�- #, then (6.25a) becomes �§ + 2$c�l + c�� = cl , so the transfer
function from c to � is
%(n) = nn� + 2$cn + c�. (6.26)
For large enough |n| we have %(n) ≈ 1/n, so that the right asymptote of % (see Figure
6.11) is always the same, regardless of c and $. In theory, the larger we choose c
(while keeping, for example, $ = 1), the better. In practice, for very large c, the system
becomes unstable, because of modeling inaccuracies. Figure 6.12 shows the simulated
results of the controller (6.24), with constants $ = 7.8125,c = 10000 HD&' . Similarly to
the results of the controller from Chapter 5.4, the obtained ripple on � is reduced
significantly to about 14mV RMS.
Fig. 6.11: Asymptotic gain Bode plot of the transfer function (6.26), showing
that when using the controller from (6.24), the noise is low in frequencies
both higher and lower than (Ù.
c
c gain
12$c
1
20dB dec⁄ −20dB dec⁄

60
Fig. 6.12: Simulation results for a PFC boost converter using a VIC with the
improved integral critical mode controller (6.24). Three grid cycles are shown in
steady state operation. The signals (except Gs) pass through an LPF with cut-off
frequency of 1kHz. This filter is insufficient to smooth he signal GæååØå = Gïðñ − G
in this scale, yet it is evident that the low frequency ripple is in order of 50mV.
The meaning of all the signals is as in Figure 5.4.
0.12 0.13 0.14 0.15 0.16 0.17 0.18-4
-2
0
2
4
time [sec]i g
[A
]
0.12 0.13 0.14 0.15 0.16 0.17 0.18
-1
0
1
time [sec]
i [A
]
0.12 0.13 0.14 0.15 0.16 0.17 0.18-0.1
-0.05
0
0.05
0.1
time [sec]
Verr
or [
V]
0.12 0.13 0.14 0.15 0.16 0.17 0.18100
200
300
400
time [sec]
Vs [
V]
(a)
(b)
(c)
(d)

61
7. Conclusion
In this thesis we have introduced the VIC, an electronic circuit that replaces a large
filter capacitor. Realizations of the VIC using a bidirectional DC/DC converter with a
sliding mode or a critical mode control have been proposed, as well as a zero-voltage-
switching realization. An application of the VIC as a component in the boost converter of
a PFC was studied and simulated, using a capacitor 1000 times smaller than an
equivalent filter capacitor required to achieve the same output voltage ripple.
The use of much smaller capacitors instead of electrolytic capacitors contributes
to higher reliability and smaller devices. Therefore, the VIC can replace the input or
output capacitors in various power converters, where there is a significant low frequency
current flowing through the capacitor. Typical applications are in PFCs and in single
phase inverters.
As a continuation of this work, we are planning to build a working prototype of
the VIC. A possible new application as the energy storage device in a synchronverter
[49] is being explored. In this application, the VIC will be used in an inverter to emulate
the inertia of a synchronous generator. In such applications, when a much large energy
storage is needed, a VIC using batteries (as will be first implemented in the
synchronverter now being built in our lab) or supercapacitors may prove more useful.
Several improvements can be made to our zero-voltage switching controllers:
when the needed current U] in the critical mode controlled VIC is very small (see Chapter
6.4), the controller creates alternating positive and negative triangles in the %] waveforms
(see Figure 6.9) that cause unnecessary conduction losses. Opening both switches when %] hits zero, and introducing a delay between consecutive triangles may reduce those
losses. The ZVS control of the PFC stage may also include a closed loop controller that
observes and corrects the current in the inductor W], instead of the complex open loop
correction of �w explained in Chapter 6.2.
Other topologies of the VIC may be useful in some applications. For example,
when the power requirements from the VIC are high and the reliability of the product is
important, a VIC using a very large film capacitor would be very expensive. An
equivalent topology where the capacitor inside the VIC works at a higher v oltage than
the input may be more economic, as film capacitors can withstand high voltages, and the
capacitance needed would be much lower (since the energy in the capacitor depends on
the square of the voltage across it).

62
Fig. 7.1: F-G characteristics of a virtual "big" capacitor (compare with Figure 2.1)
Similar to the VIC, which has 3 terminals and requires an external controller, a
virtual "big" capacitor, which has the � − � plot shown in Figure 7.1, can be
constructed. Such a device has only 2 terminals, similar to a regular capacitor, and the
voltage across it can be used to determine its charge. This adaptation (which can be
easily implemented by changing �HIJ as a function of �]) may ease the integration of the
VIC in various systems. Another idea based on the VIC is a virtual infinite inductor. This
device is defined as having a constant current over a range of magnetic fluxes, and may
be useful as a current regulator in applications such laser diodes and precise magnetic
instruments.
Q
V
maxQ minQ
refV

63
8. Bibliography
[1] AN-42047: Power Factor Correction (PFC) basics, Fairchild Semiconductor Co.
San-Jose, CA, 2004.
[2] W. Andreycak, “Zero voltage switching resonant power conversion”, UNITRODE
Power Supply Design Seminar SEM-700, 1990.
[3] J. A. Bassett, "New, zero voltage switching, high frequency boost converter
topology for power factor correction," in Proc. of INTELEC, The Hague,
Netherlands, Oct. 1995.
[4] L. O. Chua, Introduction to Nonlinear Network Theory. New York: McGraw-Hill,
1967.
[5] L. O. Chua, "Synthesis of new nonlinear network elements," in Proc. of IEEE, vol.
56, no. 8, pp. 1325-1340, 1968.
[6] D. Cortez, J. Alvarez and J. Alvarez, "Robust sliding mode control for the boost
converter," in Proc. of CIEP, Guadalajara, Mexico, Oct. 2002.
[7] M. Di Ventra, Y. V. Pershin and L. O. Chua, "Circuit elements with memory:
memristors, memcapacitors and meminductors," in Proc. of IEEE, vol. 97, no. 10,
Oct. 2009.
[8] C. Edwards and S. K. Spurgeon, Sliding Mode Control: Theory and Applications.
London, U.K.: Taylor & Francis, 1998.
[9] G. Escobar and H. Sira-Ramirez, "A passivity based-sliding mode control approach
for the regulation of power factor precompensators," in Proc. of IEEE conf. on
Decision and Control, Tampa, FL, Dec. 1998.
[10] L. Fridman, J. Moreno, R. Iriate (eds.), Sliding modes after the first decade of the
21st century. Berlin: Springer, 2011.
[11] E. Garcia-Canseco, R. Griño, R. Ortega, M. Salichs and A. M. Stankovic, "Power
factor compensation of electrical circuits," IEEE Control Systems, vol. 27, no. 2, pp.
44-59, Apr. 2007.
[12] A. Gee, F. V. P. Robinson, and R. W. Dunn, "Sliding-mode control, dynamic
assessment and practical implementation of a bidirectional buck/boost DC-to-DC
converter," in Proc. of EPE, Ohrid, Macedonia, 2011.
[13] M. Gotfryd, "Limits in boost power factor corrector operating in border-line mode,"
IEEE Trans. Power Electron., vol. 18, no. 6, pp.1330-1335, Nov. 2003.

64
[14] D. Graovac, M. Pürschel and A. Kiep, "MOSFET power losses calculation using the
data-sheet parameters", Infineon Tech. AG, Neubiberg, Germany, Jul. 2006.
[15] S. Guo, X. Lin-Shi, B. Allard, Y. Gao and Y. Ruan, "Digital sliding-mode controller
for high-frequency DC/DC SMPS", IEEE Trans. Power Electron., vol. 25, no. 5, pp.
1120-1123, May 2010.
[16] Harmonic current emissions – Guidelines to the standard EN 61000-3-2, ESPMA,
Wellingborough, UK, Nov. 2010.
[17] C. P. Henze, H. C. Martin and D. W. Parsley, "Zero-voltage switching in high
frequency power converters using pulse width modulation," in Proc. of APEC, New
Orleans, LA, Feb. 1988.
[18] A. Hijazi, M. Di Loreto, E. Bideaux, P. Venet, G. Clerc and G. Rojat, "Sliding mode
control of boost converter: application to energy storage system via
supercapacitors," in Proc. of EPE, Barcelona, Spain, 2009.
[19] G. Hua, C.-Sh. Liu, Y. Jiang and F. C. Y. Lee, "Novel zero-voltage-transition PWM
converters," IEEE Trans. Power Electron., vol. 9, no. 2, pp. 213-219, Mar. 1994.
[20] IEC Technical Report 62380:2004(E): Reliability data handbook – universal model
for reliability prediction of electronic components, PCBs and equipment, IEC,
Geneva, Switzerland, Aug. 2008.
[21] IPP60R250CP Data Sheet, Rev. 2.1, Infineon Tech. AG, München, Germany, Jan.
2012.
[22] IDH10G65C5 Data Sheet, Rev. 2.1, Infineon Tech. AG, München, Germany, Sep.
2012.
[23] J. G. Kassakian, M. F. Schlecht and G. C. Verghese, Principles of Power
Electronics. Reading, MA: Addison-Wesley, 1992.
[24] J.-S. Lai and D. Chen, "Design consideration for power factor correction boost
converter operating at the boundary of continuous conduction mode and
discontinuous conduction mode," in Proc. of APEC, San Diego, CA, Mar. 1993.
[25] A. Levant, "Sliding order and sliding accuracy in sliding mode control," Int. J.
Control, vol. 58, pp. 1247-1263 ,1993.
[26] R. L. Lin and F. C. Y. Lee, "Novel zero-current-switching-zero-voltage-switching
converters," in Proc. of PESC, Baveno, Italy, June 1996.
[27] J. Liu and N. Henze, "Reliability consideration for low-power grid-tied inverter for
photovoltaic application," in Proc. of EU PVSEC, Hamburg, Germany, 2009.
[28] K.-H. Liu and F. C. Y. Lee, "Zero-voltage switching technique in DC/DC
Converters," IEEE Trans. Power Electrons., vol. 5, no. 3, pp. 293-304, Jul. 1990.

65
[29] J. M. Manley and H. E. Rowe, "Some general properties of nonlinear elements –
Part I: general energy relations," in Proc. of IRE, vol. 44, no. 7, pp. 904-913, 1956.
[30] R. Naim, G. Weiss and S. Ben-Yaakov, "H∞ control applied to boost power
converters,", IEEE Trans. Power Electron., vol. 12, no. 4, pp. 677-683, 1997.
[31] R. Ortega, A. Loria, P. J. Nickolasson and H. Sira-Ramirez, Passivity-based Control
of Euler-Lagrange Systems. London, UK: Springer Verlag, 1998.
[32] Power Factor Correction (PFC) Handbook, Rev. 4, ON Semiconductor, Denver,
CO, Feb. 2011.
[33] M. H. Rashid, Power Electronics: Circuits, Devices, and Applications, 2nd ed.,
Englewood Cliffs, NJ: Prentice-Hall Inc., 1993, pg. 487-490.
[34] C. Rodriguez and G. A. J. Amaratunga, "Long-lifetime power inverter for
photovoltaic AC modules," IEEE Trans. Ind. Elect. vol. 55, no. 7, pp. 2593-2601,
Jul. 2008.
[35] H. E. Rowe, "Some general properties of nonlinear elements – Part II: small signal
theory," in Proc. of IRE, vol. 46, no. 5, pp. 850-860, 1958.
[36] H. Sira-Ramirez, "Sliding motions in bilinear switched networks," IEEE Trans.
Circuits and Systems, vol. 34, no. 8, pp. 919-933, 1987.
[37] G. Spiazzi, P. Mattavelli and L. Rossetto, "Sliding mode control of DC-DC
converters," in Proc. 4th Congresso Brasileiro de Elettronica de Potencia
(COBEP), Belo Horizonte, Spain, 1997.
[38] C. G. Steyn and J. D. Van Wyk, "Study and application of nonlinear turn-off
snubber for power electronic switches," IEEE Trans. Ind. Appl. vol. IA-22, no. 3,
May/Jun. 1986.
[39] W. A. Tabisz and F. C. Y. Lee, "Zero-voltage-switching multi-resonant technique –
a novel approach to improve performance of high frequency quasi-resonant
converters," in Proc. of PESC, Kyoto, Japan, Apr. 1988.
[40] S.-C. Tan, Y. M. Lai and C. K. Tse, "General design issues of sliding-mode
controllers in DC-DC converters," IEEE Trans. Ind. Electron., vol. 55, no. 3, pp.
1160-1173, Mar. 2008.
[41] S.-C. Tan, Y. M. Lai and C. K. Tse, "Implementation of pulse-width-modulation
based sliding mode controller for boost converters," IEEE Power Electron. Letters,
vol.3, no. 4, pp. 130-135, Dec. 2006.
[42] V. I. Utkin, "Sliding mode control," in Variable Structure Systems: From Principles
to Implementation, A. Sabanovic, L. Fridman and S. Spurgeon (eds.), Institute of
Electrical Engineers, 2004.

66
[43] V. I. Utkin and J. Shi, "Integral sliding mode in systems operating under uncertainty
conditions," in Proc. of CDC, Kobe, Japan, Dec. 1996.
[44] V. Vorperian, "Quasi-square-wave converters: topologies and analysis," IEEE
Trans. of Power Electron., vol. 3, no. 2, pp. 183-191, Apr. 1988.
[45] E. Walker, "Design review: a step-by-step approach to AC line-powered
converters," in TI Unitrode Design Seminar Series, 2005
[46] R.-J. Wai and L.-C. Shih, "Design of voltage tracking control for DC-DC boost
converter via total sliding-mode technique", IEEE Trans. Ind. Electron., vol. 58, no.
6, pp. 2502-2511, Jun. 2011.
[47] K. D. Young, V. I. Utkin and U. Özgüner, "A control engineer's guide to sliding
mode control," IEEE Trans. Control Systems Tech., vol. 7, no. 3, pp. 328-342, May
1999.
[48] X. Yuan and I. Barbi, "Analysis, designing and experimentation of a transformer-
assisted PWM zero-voltage switching pole inverter," IEEE Trans. of Power
Electron., vol. 15, no. 1, pp. 72-82, Jan. 2000.
[49] Q.-C. Zhong and G. Weiss, "Synchronverters: inverters that mimic synchronous
generators," IEEE Tran. Ind. Electron., vol. 85, no. 4, pp. 1259-1267, Apr. 2011.

67
תקציר
ליניארי בעל התכונה שעבור �כקבל לא) VIC(סופי וירטואלי �אנו מגדירי� קבל אי�
אנו מציעי� מימוש . נשאר קבוע � ההדקי� שלו מתח, הנמצא בתחו� מסוי� �מטע�
סליל ושני , תו� שימוש ברכיבי מיתוג, סופי הוירטואלי�חסר הפסדי� של הקבל האי�מקורב
ופי ס�הקבל האי�. אותו אנו מתארי�, המעגל מחייב אלגורית� בקרה מורכב. קבלי�
מקד� הספק תיקו�כגו� מעגל , פק ביישומי� רבי�הוירטואלי שימושי כקבל סינו� הס
)PFC( ,סופי �הקבל האי�, במימוש המוצע למרות השימוש בקבלי� קטני�. המוצג בתזה זו
, הוירטואלי יכול להחלי קבלי� גדולי� מאוד ביישומי� שאינ� דורשי� אגירת אנרגיה רבה
) PFC(מקד� הספק תיקו� של מעגלמדגימי� תוצאות סימולציה אנו . כגו� סינו� הספק
סופי �העושה שימוש בקבל אי�, )critical conduction mode( קריטיהעובד במשטר הולכה
ימימושומנתחי� מדגימי� אנו , כמו כ�. סינו� מתח המוצא של המעגלייצוב ווירטואלי עבור
סופי הוירטואלי ושל מעגל �של הקבל האי� )zero-voltage switching(אפס �מתחב�מיתוג
. תיקו� מקד� ההספק

68
אביב �אוניברסיטת תל ש איבי ואלדר פליישמ�"הפקולטה להנדסה ע
סליינר�ש זנדמ�"בית הספר לתארי� מתקדמי� ע
סופיי� וירטואליי��קבלי� אי�
בהנדסת חשמל ואלקטרוניקה " מוסמ� אוניברסיטה"חיבור זה הוגש כעבודת גמר לקראת התואר
על ידי
גיא יונה
העבודה נעשתה בבית הספר להנדסת חשמל
וויס' ורג'ג' בהנחיית פרופ
ג"שבט תשע

69
אביב �אוניברסיטת תל ש איבי ואלדר פליישמ�"הפקולטה להנדסה ע
סליינר�ש זנדמ�"עבית הספר לתארי� מתקדמי�
סופיי� וירטואליי��קבלי� אי�
בהנדסת חשמל ואלקטרוניקה " מוסמ� אוניברסיטה"חיבור זה הוגש כעבודת גמר לקראת התואר
על ידי
גיא יונה
ג"שבט תשע