guidence robot for blind people
TRANSCRIPT

Mr.Vivek JadhavMr.Nitesh Chaudhari
Mr.Mayur BhoyeMiss.Dipshree Kabade
BE(Electronics)
Ssvps’s Collage of Engineering Dhule
Guidence Robot for Blind people using PIC Microcontroller and IR Sensor
Guided ByProf.R.P.Desaleassi.professor

• In this project PIC micro controller, IR sensors ,Led display,vibrator,relays,motors.
• Blind human send the signals by using RF module to controller
• Controller follows the path as per sending signalsIf obstacles comes in the path then it gives the rotation and follow continue path this is basic principle of our project.
Introduction

HistoryIn old days visual impaired people or blind human beings follows classical methods for their displacement ,either they can use tools like cane or they required help of some person,they use traditional techiniques also shown in pictures. The cane used by blind people is time consuming since every time the blind should have to checkthe place whether there is a obstacle or not. Also the blind people don’t have the idea of moving objects.

Pedestrian with long white cane Pedestrian with dog guide
Visually impaired pedestrian crossing street with Orientation and Mobility Specialist

Algorithm of systemRF Module and IR sensor
PICController
LDR LED
Lcd display
Relays and transistors
vibrator
motors

IR Rx
LED LDR
TransistorAnd relays
TransistorAnd relays
Vibrator left
Vibrator right
RF module
IR Tx PIC Micro controller
16*2 Lcd display
motor1
motor2

Circuit diagram

Functions of Components in circuit*Power supply-for Run the circuit.*RF module-sending for input signals*IR transimitter and receiver-detection of obscltles*LED-for optical signals*LDR-for sensing the optical signals*PIC controller-giving the signals to lcd display,relay
driver,vibretor etc*Motor-for displacement of robot.

PIC microcontroller specifications*Instruction set of pic consist of 35 single word instruction*The operating speed DC-20 Mhz,200ns*Power on reset*Power up oscillator start up timer.*Watchdog timer*Operating voltage range2.5V-6.0*Low power high speed*Contains SSP,SPI *Power saving operation modeIT should be noted that the programming of Controller has been done in C language

*RF moduleEngineersGarage
RF Module (Transmitter & Receiver) CP042 Image:
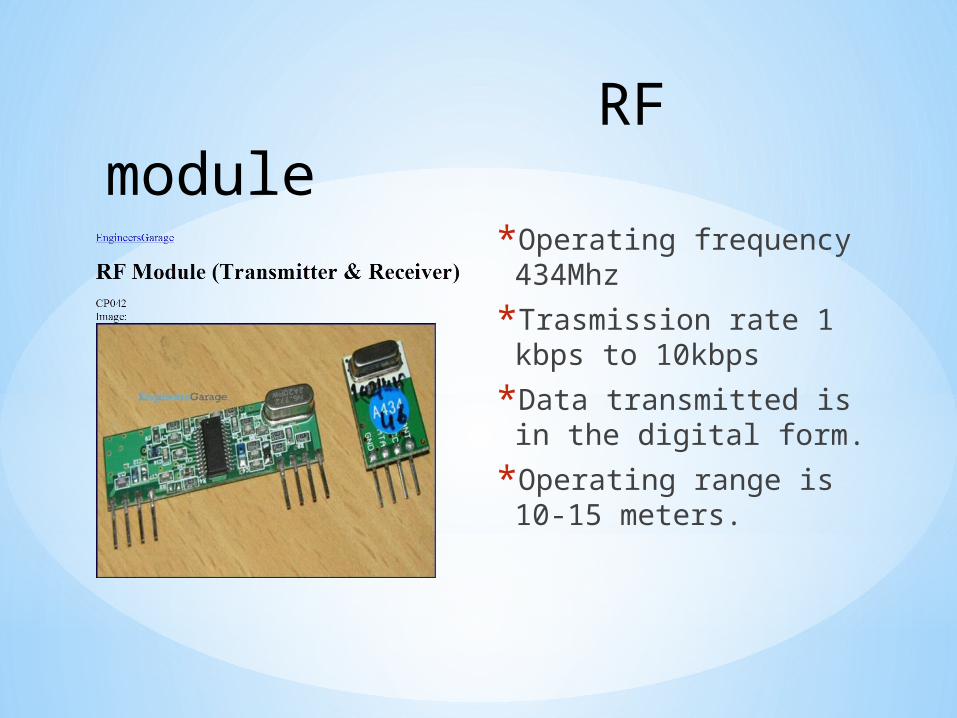
RF module*Operating frequency
434Mhz*Trasmission rate 1 kbps
to 10kbps*Data transmitted is in the
digital form.*Operating range is 10-15
meters.

Applications
* This robot useful for blind people as well as visual impaired people.

Advantages
1.Robot is connected with cane so blind human being easily handle.2.less time consuming3.IR sensors are use for obstacle detection.4.blind people doesn’t required help of another person.5.Cost is less.6.User can take advantage of rf as well as dtmf technique.

*ConclusionThe system proposed is of great advantage to the people who are blind and visually impaired.

*References[1] http://en.wikipedia.org/wiki/Blindness
[2] http://en/www.google.com[3]www.engineergarage.com

Thank you