extravehicular activity operations and adva nc em ts · automation and extravehicular activity eva...
TRANSCRIPT

A dramatic expansion in extravehicular activity (EVA)—or
“spacewalking”—capability occurred during the Space Shuttle
Program; this capability will tremendously benefit future space
exploration. Walking in space became almost a routine event during
the program—a far cry from the extraordinary occurrence it had been.
Engineers had to accommodate a new cadre of astronauts that included
women, and the tasks these spacewalkers were asked to do proved
significantly more challenging than before. Spacewalkers would be
charged with building and repairing the International Space Station.
Most of the early shuttle missions helped prepare astronauts, engineers,
and flight controllers to tackle this series of complicated missions
while also contributing to the success of many significant national
resources—most notably the Hubble Space Telescope. Shuttle
spacewalkers manipulated elements up to 9,000 kg (20,000 pounds),
relocated and installed large replacement parts, captured and repaired
failed satellites, and performed surgical-like repairs of delicate solar
arrays, rotating joints, and sensitive Orbiter Thermal Protection System
components. These new tasks presented unique challenges for the
engineers and flight controllers charged with making EVAs happen.
The Space Shuttle Program matured the EVA capability with advances in
operational techniques, suit and tool versatility and function, training
techniques and venues, and physiological protocols to protect astronauts
while providing better operational efficiency. Many of these advances
were due to the sheer number of EVAs performed. Prior to the start
of the program, 38 EVAs had been performed by all prior US spaceflights
combined. The shuttle astronauts accomplished 157 EVAs.
This was the primary advancement in EVA during the shuttle era—
an expansion of capability to include much more complicated and difficult
tasks, with a much more diverse Astronaut Corps, done on a much more
frequent basis. This will greatly benefit space programs in the future as they
can rely on a more robust EVA capability than was previously possible.
110 The Space Shuttle and Its Operations
ExtravehicularActivityOperations andAdvancements
Nancy PatrickJoseph KosmoJames LockeLuis TrevinoRobert Trevino

Spacewalking:Extravehicular Activity
If We Can Put a Human on the Moon, Why Do We Need toPut One in the Payload Bay?
The first question for program
managers at NASA in regard to
extravehicular activities (EVAs) was:
Are they necessary? Managers
faced the challenge of justifying the
added cost, weight, and risk of putting
individual crew members outside
and isolated from the pressurized
cabin in what is essentially a personal
spacecraft. Robotics or automation are
often considered alternatives to sending
a human outside the spacecraft;
however, at the time the shuttle was
designed, robotics and automation were
not advanced enough to take the place
of a human in all required external
tasks. Just as construction workers and
cranes are both needed to build
skyscrapers, EVA crew members and
robots are needed to work in space.
Early in the Space Shuttle Program,
safety engineers identified several
shuttle contingency tasks for which
EVA was the only viable option.
Several shuttle components could
not meet redundancy requirements
through automated means without an
untenable increase in weight or system
complexity. Therefore, EVA was
employed as a backup. Once EVA
capability was required, it became a
viable and cost-effective backup
option as NASA identified other
system problems. Retrieval or repair
of the Solar Maximum Satellite
(SolarMax) and retrieval of the Palapa
B2 and Westar VI satellites were EVA
tasks identified very early in the
program. Later, EVA became a standard
backup option for many shuttle
payloads, thereby saving cost and
resolving design issues.
The Space Shuttle and Its Operations 111
Gregory HarbaughAstronaut on STS-39 (1991), STS-54(1993), and STS-82 (1997).Manager, Extravehicular Activity (EVA)Office (1997-2001).
“In my opinion, one of the major
achievements of the Space Shuttle
era was the dramatic enhancement
in productivity, adaptability, and
efficiency of EVA, not to mention
the numerous EVA-derived
accomplishments. At the beginning
of the shuttle era, the extravehicular
mobility unit had minimal capability for tools, and overall utility of EVA was
limited. However, over the course of the program EVA became a planned event
on many missions and ultimately became the fallback option to address a
multitude of on-orbit mission objectives and vehicle anomalies. Speaking as the
EVA program manager for 4 years (1997-2001), this was the result of incredible
reliability of the extravehicular mobility unit thanks to its manufacturers
(Hamilton Sundstrand and ILC Dover), continuous interest and innovation led by
the EVA crew member representatives, and amazing talent and can-do spirit of
the engineering/training teams. In my 23 years with NASA, I found no team of
NASA and contractor personnel more technically astute, more dedicated, more
innovative, or more ultimately successful than the EVA team.
EVA became an indispensible part of the Space Shuttle Program. EVA could and
did fix whatever problems arose, and became an assumed tool in the holster
of the mission planners and managers. In fact, when I was EVA program
manager we had shirts made with the acronym WOBTSYA—meaning ‘we’ve
only begun to save your Alpha’ (the ISS name at the time). We knew when called
upon we could handle just about anything that arose.”

Automation and Extravehicular Activity
EVA remained the preferred method
for many tasks because of its
efficiency and its ability to respond to
unexpected failures and contingencies.
As amazing and capable as robots
and automation are, they are typically
efficient for anticipated tasks or those
that fall within the parameters of
known tasks. Designing and certifying
a robot to perform tasks beyond
known requirements is extremely
costly and not yet mature enough to
replace humans.
Robots and automation streamlined
EVA tasks and complemented EVA,
resulting in a flexible and robust
capability for building, maintaining,
and repairing space structures and
conducting scientific research.
Designing the Spacesuit for the Space Shuttle
Once NASA established a requirement
for EVA, engineers set out to design
and build the hardware necessary
to provide this capability. Foremost,
a spacesuit was required to allow a
crew member to venture outside the
pressurized cabin. The Gemini and
Apollo spacesuits were a great
starting point; however, many changes
were needed to create a workable
suit for the shuttle. The shuttle suit
had to be reusable, needed to fit many
different crew members, and was
required to last for many years
of repeated use. Fortunately, engineers
were able to take advantage of
advanced technology and lessons
learned from earlier programs to meet
these new requirements.
The cornerstone design requirement
for any spacesuit is to protect the crew
member from the space environment.
Suit Environment as Compared to Space Environment
The target suit pressure was an
exercise in balancing competing
requirements. The minimum pressure
required to sustain human life is
21.4 kPa (3.1 psi) at 100% oxygen.
Higher suit pressure allows better
oxygenation and decreases the risk of
decompression sickness to the EVA
crew member. Lower suit pressure
increases crew member flexibility
and dexterity, thereby reducing crew
fatigue. This is similar to a water hose.
A hose full of water is difficult to
bend or twist, while an empty hose
is much easier to move around.
Higher suit pressures also require
more structural stiffening to maintain
suit integrity (just as a thicker
balloon is required to hold more air).
This further exacerbates the decrease
in flexibility and dexterity. The final
suit pressure selected was 29.6 kPa
(4.3 psi), which has proven to be a
reasonable compromise between these
competing constraints.
The next significant design
requirements came from the specific
mission applications: what EVA tasks
112 The Space Shuttle and Its Operations
Contingency extravehicular activity: Astronaut Scott Parazynski, atop the Space Station Robotic Arm and the Shuttle Robotic Arm extension, the Orbiter Boom Sensor System, approaches the InternationalSpace Station solar arrays to repair torn sections during STS-120 (2009).
AtmosphereSuit Environment Requirements
Space Environment
Pressure:23.44 kPa-27.57 kPa
(3.4-4.4 psi)1 Pa
(1.45 x 10-4 psi)
Oxygen: 100% 0%
Temperature:10°C-27°C(50°F-80°F)
-123°C-+232°C(-190°F-+450°F)
were required, who would perform
them, and to what environmental
conditions the spacewalkers would be
exposed. Managers decided that the
shuttle spacesuit would only be
required to perform in microgravity
and outside the shuttle cabin. This
customized requirement allowed
designers to optimize the spacesuit.
The biggest advantage of this approach
was that designers didn’t have to worry
as much about the mass of the suit.
Improving mobility was also a design
goal for the shuttle extravehicular
mobility unit (i.e., EVA suit). Designers
added features to make it more flexible
and allow the crew member greater
range of motion than with previous
suits. Bearings were included in the
shoulder, upper arm, and waist areas to
provide a useful range of mobility.
The incorporation of the waist bearing
enabled the EVA crew member to rotate.
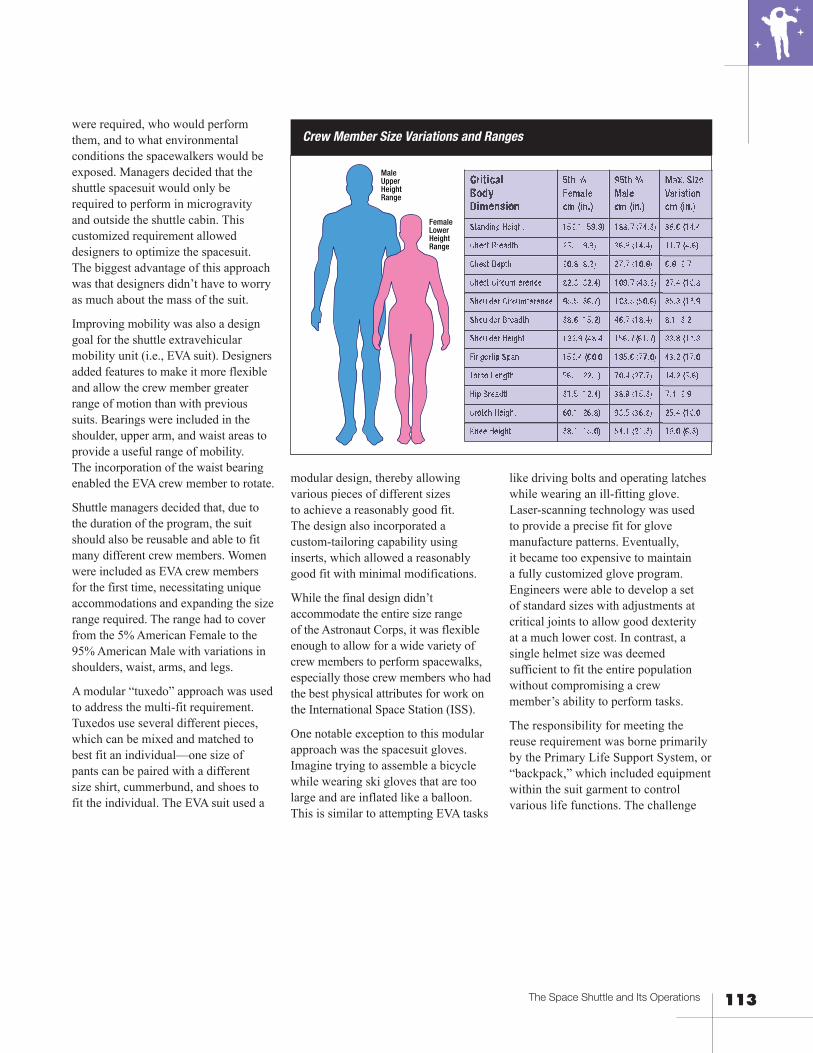
Shuttle managers decided that, due to
the duration of the program, the suit
should also be reusable and able to fit
many different crew members. Women
were included as EVA crew members
for the first time, necessitating unique
accommodations and expanding the size
range required. The range had to cover
from the 5% American Female to the
95% American Male with variations in
shoulders, waist, arms, and legs.
A modular “tuxedo” approach was used
to address the multi-fit requirement.
Tuxedos use several different pieces,
which can be mixed and matched to
best fit an individual—one size of
pants can be paired with a different
size shirt, cummerbund, and shoes to
fit the individual. The EVA suit used a
modular design, thereby allowing
various pieces of different sizes
to achieve a reasonably good fit.
The design also incorporated a
custom-tailoring capability using
inserts, which allowed a reasonably
good fit with minimal modifications.
While the final design didn’t
accommodate the entire size range
of the Astronaut Corps, it was flexible
enough to allow for a wide variety of
crew members to perform spacewalks,
especially those crew members who had
the best physical attributes for work on
the International Space Station (ISS).
One notable exception to this modular
approach was the spacesuit gloves.
Imagine trying to assemble a bicycle
while wearing ski gloves that are too
large and are inflated like a balloon.
This is similar to attempting EVA tasks
like driving bolts and operating latches
while wearing an ill-fitting glove.
Laser-scanning technology was used
to provide a precise fit for glove
manufacture patterns. Eventually,
it became too expensive to maintain
a fully customized glove program.
Engineers were able to develop a set
of standard sizes with adjustments at
critical joints to allow good dexterity
at a much lower cost. In contrast, a
single helmet size was deemed
sufficient to fit the entire population
without compromising a crew
member’s ability to perform tasks.
The responsibility for meeting the
reuse requirement was borne primarily
by the Primary Life Support System, or
“backpack,” which included equipment
within the suit garment to control
various life functions. The challenge
The Space Shuttle and Its Operations 113
Male Upper Height Range
Female Lower Height Range
Crew Member Size Variations and Ranges
Critical Body Dimension
5th % Female cm (in.)
95th % Male cm (in.)
Max. Size Variation cm (in.)
Standing Height 152.1 (59.9) 188.7 (74.3) 36.6 (14.4)
Chest Breadth 25.1 (9.9) 36.6 (14.4) 11.7 (4.6)
Chest Depth 20.8 (8.2) 27.7 (10.9) 6.9 (2.7)
Chest Circumference 82.3 (32.4) 109.7 (43.2) 27.4 (10.8)
Shoulder Circumference 95.5 (36.7) 128.5 (50.6) 35.3 (13.9)
Shoulder Breadth 38.6 (15.2) 46.7 (18.4) 8.1 (3.2)
Shoulder Height 122.9 (48.4) 156.7 (61.7) 33.8 (13.3)
Fingertip Span 152.4 (60.0) 195.6 (77.0) 43.2 (17.0)
Torso Length 56.1 (22.1) 70.4 (27.7) 14.2 (5.6)
Hip Breadth 31.5 (12.4) 38.9 (15.3) 7.4 (2.9)
Crotch Height 60.1 (26.8) 93.5 (36.8) 25.4 (10.0)
Knee Height 38.1 (15.0) 54.1 (21.3) 16.0 (6.3)
for Primary Life Support System
designers was to provide a multiyear,
25-EVA system. This design challenge
resulted in many innovations over
previous programs.
One area that had to be improved to
reduce maintenance was body
temperature control. Both the Apollo
and the shuttle EVA suit used a
water cooling system with a series of
tubes that carried chilled water and
oxygen around the body to cool and
ventilate the crew member. The shuttle
EVA suit improved on the Apollo
design by removing the water tubes
from the body of the suit and putting
them in a separate garment—the
liquid cooling ventilation garment.
This garment was a formfitting,
stretchable undergarment (think long
johns) that circulated water and oxygen
supplied by the Primary Life Support
System through about 91 m (300 ft) of
flexible tubing. This component of the
suit was easily replaceable,
inexpensive, easy to manufacture, and
available in several sizes.
Materials changes in the Primary Life
Support System also helped to reduce
maintenance and refurbishment
requirements. Shuttle designers replaced
the tubing in the liquid cooling
ventilation garment with ethylene vinyl
acetate to reduce impurities carried by
the water into the system. The single
change that likely contributed the most
toward increasing component life and
reducing maintenance requirements
was the materials selection for the
Primary Life Support System water
tank bladder. The water tank bladder
expanded and contracted as the water
quantity changed during the EVA, and
functioned as a barrier between the
water and the oxygen system. Designers
replaced the molded silicon bladder
material with Flourel™, which leached
fewer and less-corrosive effluents
and was half as permeable to water,
resulting in dryer bladder cavities.
This meant less corrosion and cleaner
filters—all resulting in longer life and
less maintenance.
Using the Apollo EVA suit as the basis
for the shuttle EVA suit design saved
time and money. It also provided a
better chance for success by using
proven design. The changes that were
incorporated, such as using a modular
fit approach, including more robust
materials, and taking advantage of
advances in technology, helped meet
the challenges of the Space Shuttle
Program. These changes also resulted in
a spacesuit that allowed different types
of astronauts to perform more difficult
EVA tasks over a 30-year program with
very few significant problems.
114 The Space Shuttle and Its Operations
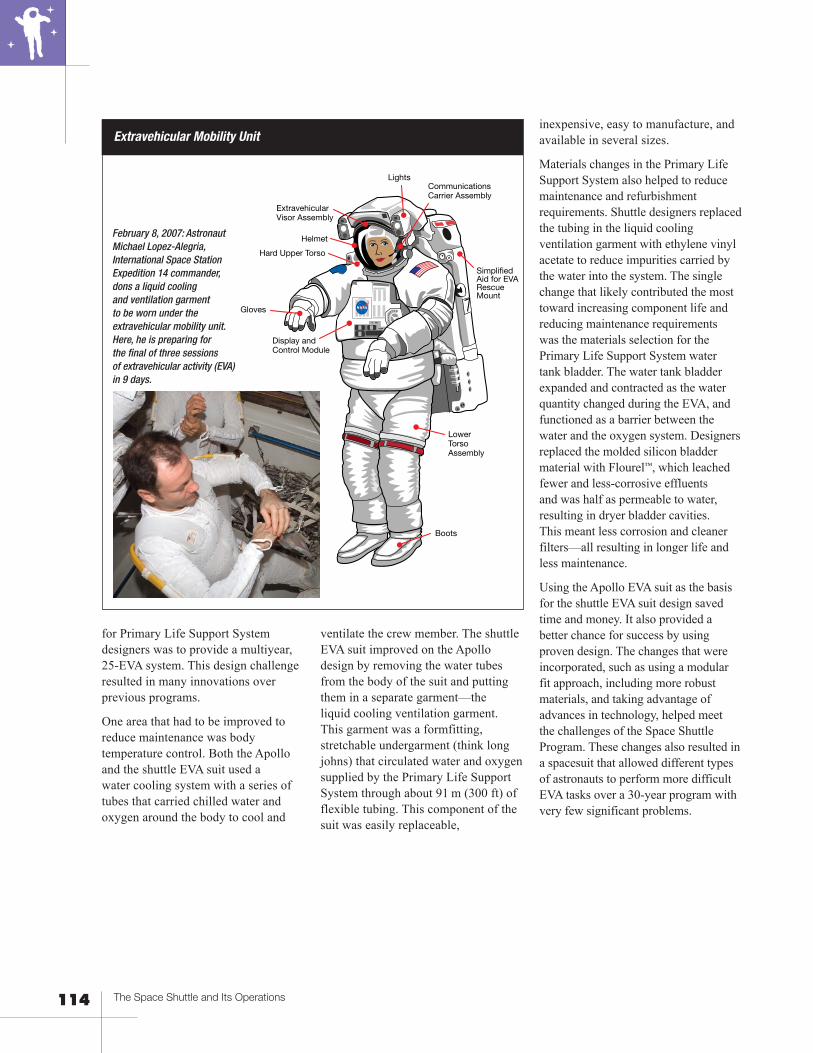
LightsCommunicationsCarrier Assembly
LowerTorsoAssembly
Simpli�edAid for EVARescueMount
Hard Upper Torso
Display and Control Module
Boots
Gloves
ExtravehicularVisor Assembly
Helmet
Extravehicular Mobility Unit
February 8, 2007: AstronautMichael Lopez-Alegria,International Space StationExpedition 14 commander,dons a liquid cooling and ventilation garment to be worn under theextravehicular mobility unit.Here, he is preparing for the final of three sessions of extravehicular activity (EVA)in 9 days.

Extravehicular Activity Mission Operations andTraining—All Dressed Up, Time to Get to Work
If spacesuit designers were the outfitters
of spacewalks, flight controllers, who
also plan the EVAs and train the crew
members, were the choreographers.
Early in the program, EVAs resembled
a solo dancer performing a single
dance. As flights became more
complicated, the choreography became
more like a Broadway show—several
dancers performing individual
sequences, before coming together to
dance in concert. On Broadway, the
individual sequences have to be
choreographed so that dancers come
together at the right time. This
choreography is similar to developing
EVA timelines for a Hubble repair or an
ISS assembly mission. The tasks had to
be scheduled so that crew members
could work individually when only one
person was required for a task, but
allow them to come together when they
had a jointly executed task.
The goal was to make timelines as
efficient as possible, accomplish as
many tasks as possible, and avoid
one crew member waiting idle until
the other crew member finished a task.
The most significant contribution of
EVA operations during the shuttle era
was the development of this ability to
plan and train for a large number of
interdependent and challenging EVA
tasks during short periods of time.
Over time, the difficulty increased to
require interdependent spacewalks
within a flight and finally
interdependent spacewalks between
flights. This culminated in the
assembly and maintenance of the ISS,
which required the most challenging
series of EVAs to date.
The first shuttle EVAs were devoted
to testing the tools and suit equipment
that would be used in upcoming
spacewalks. After suit/airlock problems
scrubbed the first attempt, NASA
conducted the first EVA since 1974
during Space Transportation System
(STS)-6 on April 7, 1983. This EVA
practiced some of the shuttle
contingency tasks and exercised the
suit and tools. The goal was to gain
confidence and experience with the new
EVA hardware. Then on STS-41B
(1984), the second EVA flight tested
some of the critical tools and techniques
that would be used on upcoming
spacewalks to retrieve and repair
satellites. One of the highlights was a
test of the manned maneuvering unit, a
jet pack designed to allow EVA crew
members to fly untethered, retrieve
satellites, and return with the satellite to
the payload bay for servicing. The
manned maneuvering unit allowed an
EVA crew member to perform precise
maneuvering around a target and dock
to a payload in need of servicing.
Shuttle Robotic Arm
Another highlight of the STS-41B
EVAs was the first demonstration of
an EVA crew member performing tasks
while positioned at the end of the
The Space Shuttle and Its Operations 115
Astronaut Bruce McCandless on STS 41B (1984) in the nitrogen-propelled manned maneuvering unit,completing an extravehicular activity. McCandless is floating without tethers attaching him to the shuttle.

Shuttle Robotic Arm. This capability
was a major step in streamlining EVAs
to come as it allowed a crew member to
be moved from one worksite to another
quickly. This capability saved the effort
required to swap safety tethers during
translation and set up and adjust foot
restraints—sort of like being able to
roll a chair to move around an office
rather than having to switch from chair
to chair. It was also a first step in
evaluating how an EVA crew member
affected the hardware with which he or
she interacted.
The concern with riding the Shuttle
Robotic Arm was ensuring that the
EVA crew member did not damage the
robotic arm’s shoulder joint by
imparting forces and moments at the
end of the 15-m (50-ft) boom that didn’t
have much more mass than the crew
member. Another concern was the
motion that the Shuttle Robotic Arm
could experience under EVA
loads—similar to how a diving board
bends and flexes as a diver bounces on
its end. Too much motion could make it
too difficult to perform EVA tasks and
too time consuming to wait until the
motion damps out. Since the arm joints
were designed to slip before damage
could occur and crew members would
be able to sense a joint slip, the belief
was that the arm had adequate
safeguards to preclude damage.
Allowing a crew member to work from
the end of the arm required analysis of
the arm’s ability to withstand EVA crew
member forces. Since both the Shuttle
Robotic Arm and the crew member
were dynamic systems, the analysis
could be complicated; however, experts
agreed that any dynamic EVA load case
with a static Shuttle Robotic Arm would
be enveloped by the case of applying
brakes to the arm at its worst-case
runaway speed with a static EVA crew
member on the end. After this analysis
demonstrated that the Shuttle Robotic
Arm would not be damaged, EVA crew
members were permitted to work on it.
Working from the Shuttle Robotic
Arm became an important technique
for performing EVAs.
Satellite Retrieval and Repair
Once these demonstrations and tests
of EVA capabilities were complete, the
EVA community was ready to tackle
satellite repairs. The first satellite to
be repaired was SolarMax, on STS-41C
(1984), 1 year after the first shuttle
EVA. Shortly after STS-41B landed,
NASA decided to add retrieval of
Palapa B2 and Westar VI to the shuttle
manifest, as the satellites had failed
shortly after their deploy on that
flight. While these early EVAs were
ultimately successful, they did not go
as originally planned.
NASA developed several new tools
to assist in the retrieval. For SolarMax,
the trunnion pin attachment device
was built to attach to the manned
maneuvering unit on one side and then
mate to the SolarMax satellite
on the other side to accommodate the
towing of SolarMax back to the
payload bay. Similarly, an apogee
kick motor capture device (known
as the “stinger”) was built to attach to
the manned maneuvering unit to mate
with the Palapa B2 and Westar VI
satellites. An a-frame was also provided
to secure the Palapa B and Westar
satellites in the payload bay. All was
ready for the first operational EVAs;
however, engineers, flight controllers,
and managers would soon have their
first of many experiences
demonstrating the value of having a
crew member in the loop.
When George Nelson flew the manned
maneuvering unit to SolarMax during
STS-41C, the trunnion pin attachment
device jaws failed to close on the
service module docking pins. After
several attempts to mate, the action
induced a slow spin and eventually an
unpredictable tumble. SolarMax was
stabilized by ground commands from
Goddard Space Flight Center during
the crew sleep period. The next day,
Shuttle Robotic Arm operator Terry
Hart grappled and berthed the
satellite—a procedure that flight
controllers felt was too risky preflight.
EVA crew members executed a second
EVA to complete the planned repairs.
The STS-51A (1984) Palapa B2/Westar
VI retrieval mission was planned,
trained, and executed within 10 months
of the original satellite failures.
In the wake of the problem retrieving
SolarMax, flight planners decided
to develop backup plans in case the
crew had problems with the stinger
or a-frame. Joseph Allen flew the
manned maneuvering unit/stinger
and mated it to the Palapa B2 satellite;
however, Dale Gardner, working off
the robotic arm, was unable to attach
the a-frame device designed to assist
in handling the satellite. The crew
resorted to a backup plan, with
Gardner grasping the satellite then
slowly bringing it down and securing
it for return to Earth. On a subsequent
EVA, Gardner used the manned
maneuvering unit and stinger to
capture the Westar VI satellite, and the
crew used the Shuttle Robotic Arm to
maneuver it to the payload bay where
the EVA crew members secured it.
Although the manned maneuvering unit
was expected to be used extensively,
the Shuttle Robotic Arm proved more
116 The Space Shuttle and Its Operations

efficient because it had fewer
maintenance costs and less launch mass.
The next major EVA missions were
STS-51D and STS-51I, both in 1985.
STS-51D launched and deployed
Syncom-IV/Leasat 3 satellite, which
failed to activate after deployment.
The STS-51D crew conducted the first
unscheduled shuttle EVA. The goal
was to install a device on the Shuttle
Robotic Arm that would be used to
attempt to flip a switch to activate the
satellite. Although the EVA was
successful, the satellite did not activate
and STS-51I was replanned to attempt
to repair the satellite. STS-51I was
executed within 4 months of STS-51D,
and two successful EVAs repaired it.
These early EVA flights were
significant because they established
many of the techniques that would be
used throughout the Space Shuttle
Program. They also helped fulfill the
promise that the shuttle was a viable
option for on-orbit repair of satellites.
EVA flight controllers, engineers, and
astronauts proved their ability to
respond to unexpected circumstances
and still accomplish mission objectives.
EVA team members learned many
things that would drive the program and
payload customers for the rest of the
program. They learned that moving
massive objects was not as difficult as
expected, and that working from the
Shuttle Robotic Arm was a stable way
of positioning an EVA crew member.
Over the next several years, EVA
operations were essentially a further
extension of the same processes and
operations developed and demonstrated
on these early flights.
During the early part of the Space
Shuttle Program, EVA was considered to
be a last resort because of inherent risk.
As the reliability and benefits of EVA
were better understood, however,
engineers began to have more
confidence in it. They accepted that EVA
could be employed as a backup means,
be used to make repairs, or provide a
way to save design complexity.
Engineers were able to take advantage
of the emerging EVA capability in the
design of shuttle payloads. Payload
designers could now include manual
EVA overrides on deployable systems
such as antennas and solar arrays instead
of adding costly automated overrides.
Spacecraft subsystems such as batteries
and scientific instruments were designed
to be repaired or replaced by EVA.
Hubble and the Compton Gamma Ray
Observatory were two notable science
The Space Shuttle and Its Operations 117
Astronauts George Nelson (right) and James van Hoften captured Solar Maximum Satellite in the aft end of the Challenger’s cargo bay during STS-41C (1984). The purpose was to repair the satellite.They used the mobile foot restraint and the robotic arm for moving about the satellite.

satellites that were able to use a
significant number of EVA-serviceable
components in their designs.
EVA flight controllers and engineers
began looking ahead to approaching
missions to build the ISS. To prepare
for this, program managers approved
a test program devoted to testing tools,
techniques, and hardware design
concepts for the ISS. In addition to
direct feedback to the tool and station
hardware designs, the EVA community
gained valuable experience in
planning, training, and conducting
more frequent EVAs than in the early
part of the program.
Hubble Repair
As NASA had proven the ability to
execute EVAs and accomplish some
remarkable tasks, demand for the
EVA resource increased sharply on
the agency. One of the most dramatic
and demanding EVA flights began
development shortly after the
deployment of Hubble in April 1990.
NASA’s reputation was in jeopardy
from the highly publicized Hubble
failure, and the scientific community
was sorely disappointed with the
capability of the telescope. Hubble was
designed with several servicing missions
planned, but the first mission—to
restore its optics to the expected
performance—took on greater
significance. EVA was the focal point
in recovery efforts. The mission took
nearly 3 years to plan, train, and develop
the necessary replacement parts.
The Hubble repair effort required
significant effort from most resources
in the EVA community. Designers from
Goddard Space Flight Center, Johnson
Space Center, Marshall Space Flight
118 The Space Shuttle and Its Operations
STS-49 significantly impacted planning for future EVAs. It was the most aggressive
EVA flight planned, up to that point, with three EVAs scheduled. Engineers designed
a bar with a grapple fixture to capture Intelsat and berth it in the payload bay.
The data available on the satellite proved inadequate and it was modeled incorrectly
for ground simulations. After two EVA attempts to attach the capture bar, flight
controllers looked at other options.
The result was an unprecedented three-man EVA using space hardware to build
a platform for the crew members, allowing them to position themselves in a triangle
formation to capture the Intelsat by hand. This required an intense effort by ground
controllers to verify that the airlock could fit three crew members, since it was
only designed for two, and that there were sufficient resources to service all three.
Additional analyses looked at whether there were sufficient handholds to grasp
the satellite, that satellite temperatures would not exceed the glove temperature limits,
and that structural margins were sufficient. Practice runs on the ground convinced
ground operators that the operation was possible. The result was a successful capture
and repair during the longest EVA in the shuttle era.
Three Spacewalkers Capture Satellite
Astronauts Rick Hieb on the starboard payload bay mounted foot restraint work station, Bruce Melnick with his back to the camera, and Tom Akers on the robotic arm mounted footrestraint work station—on the backside of the Intelsat during STS-49 (1992).
Center, and the European Space
Agency delivered specialized tools and
replacement parts for the repair.
Approximately 150 new tools and
replacement parts were required for this
mission. Some of these tools and parts
were the most complicated ones
designed to date. Flight controllers
concentrated on planning and training
the unprecedented number of EVA
tasks to be performed—a number
that continued to grow until launch.
What started as a three-EVA mission
had grown to five by launch date.
The EVA timeliners faced serious
challenges in trying to accomplish so
many tasks, as precious EVA resources
were stretched to the limit.
New philosophies for managing EVA
timelines developed in response to
the growing task list. Until then, flight
controllers included extra time in
timelines to ensure all tasks would be
completed, and crews were only trained
in the tasks stated in those timelines.
For Hubble, timelines included less
flexibility and crews were trained on
extra tasks to make sure they could get
as much done as possible. With the next
servicing mission years away, there
was little to lose by training for extra
tasks. To better ensure the success of
the aggressive timelines, the crew
logged more than twice the training
time as on earlier flights.
When astronauts were sent to the
Hubble to perform its first repair,
engineers became concerned that the
crew members would put unacceptable
forces on the great observatory.
Engineers used several training
platforms to measure forces and
moments from many different crew
members to gain a representative set
of both normal and contingency EVA
tasks. These cases were used to
analyze Hubble for structural integrity
and to sensitize EVA crew members
to where and when they needed to be
careful to avoid damage.
EVA operators also initiated three key
processes that would prove very
valuable both for Hubble and later
for ISS. Operators and tool designers
requested that, during Hubble
assembly, all tools be checked for fit
against all Hubble components and
replacement parts. They also required
extensive photography of all Hubble
components and catalogued the
images for ready access to aid in
real-time troubleshooting. Finally,
engineers analyzed all the bolts that
would be actuated during the repair
The Space Shuttle and Its Operations 119
Fatigue—A Constant Concern DuringExtravehicular ActivityWhy are extravehicular activities (EVAs) so fatiguing if nothing has any weight in
microgravity?
Lack of suit flexibility and dexterity forces the wearer to exert more energy to perform
tasks. With the EVA glove, the fingers are fixed in a neutral position. Any motion that
changes the finger/hand position requires effort.
Lack of gravity removes leverage. Normally, torque used to turn a fastener is opposed
by a counter-torque that is passively generated by the weight of the user. In
weightlessness, a screwdriver user would spin aimlessly unless the user’s arm and
body were anchored to the worksite, or opposed the torque on the screwdriver with an
equal muscular force in the opposite direction. Tool use during EVAs is accomplished
by direct muscle opposition with the other arm, locking feet to the end of a robotic arm,
or rigidly attaching the suit waist to the worksite. EVA tasks that require many
hand/arm motions over several hours lead to significant forearm fatigue.
The most critical tasks—ingressing the airlock, shutting the hatch, and reconnecting
the suit umbilical line— occur at the end of an EVA. Airlocks are cramped and tasks
are difficult, especially when crew members are fatigued and overheated. Overheating
occurs because the cooling system must be turned off before an astronaut can enter
the airlock. The suit does not receive cooling until the airlock umbilical is connected.
The helmet visor can fog over at this point, making ingress even more difficult.
Along with crew training, medical doctors and the mission control team monitor
exertion level, heart rate, and oxygen usage. Communication between ground personnel
and astronauts is essential in preventing fatigue from having disastrous consequences.

to provide predetermined responses to
problems operating bolts—data like
the maximum torque allowed across
the entire thermal range. Providing
these data and fit checks would become
a standard process for all future
EVA-serviceable hardware.
The first Hubble repair mission
was hugely successful, restoring
Hubble’s functionality and NASA’s
reputation. The mission also flushed
out many process changes that the
EVA community would need to adapt
as the shuttle prepared to undertake
assembly of the ISS. What had been a
near disaster for NASA when Hubble
was deployed turned out to be a
tremendous opportunity for engineers,
flight controllers, and mission
managers to exercise a station-like
EVA mission prior to when such
missions would become routine. This
mission helped demonstrate NASA’s
ability to execute a complex mission
while under tremendous pressure to
restore a vital international resource.
Flight Training
Once NASA identified the tasks for a
shuttle mission, the crew had to be
trained to perform them. From past
programs, EVA instructors knew that
the most effective training for
microgravity took place under water,
where hardware and crew members
could be made neutrally buoyant. The
Weightless Environment Training
Facility— a swimming pool that
measured 23 m (75 ft) long, 15 m (50 ft)
wide, and 8 m (25 ft) deep—was the
primary location for EVA training early
in the Space Shuttle Program. The
Weightless Environment Training
Facility contained a full-size mock-up
of the shuttle payload bay with all
EVA interfaces represented. In the same
manner that scuba divers use buoyancy
compensation vests and weights, crew
members and their tools were
configured to be neutrally buoyant
through the use of air, foam inserts,
and weights. This enabled them
to float suspended at the worksite, thus
simulating a weightless environment.
Crew members trained an average of
10 hours in the Weightless Environment
Training Facility for every 1 hour of
planned on-orbit EVA. For complicated
flights, as with the first Hubble repair
mission, the training ratio was increased.
Later, EVA training moved to a new,
larger, and more updated water tank—
the Neutral Buoyancy Laboratory—to
accommodate training on the ISS.
A few limitations to the neutral
buoyancy training kept it from being a
perfect zero-gravity simulation. The
water drag made it less accurate for
simulating the movement of large
objects. And since they were still in a
gravity environment, crew members
had to maintain a “heads-up”
orientation most of the time to avoid
blood pooling in the head. So mock-ups
had to be built and oriented to allow
crew members to maintain this position.
The gravity environment of the water
tank also contributed to shoulder
injuries—a chronic issue, especially in
the latter part of the program. Starting
in the mid 1990s, several crew
members experienced shoulder injuries
during the course of their EVA training.
This was due to a design change
made at that time to the extravehicular
mobility unit shoulder joint. The
shoulder joint was optimized for
mobility, but designers noticed wear
in the fabric components of the
original joint. To avoid the risk of a
catastrophic suit depressurization,
NASA replaced the joint with a scye
bearing that was much less subject
to wear but limited to rotation in a
single plane, thus reducing the range
of motion. The scye bearing had to be
placed to provide good motion for
work and allow the wearer to don the
extravehicular mobility unit through
the waist ring (like putting on a shirt),
120 The Space Shuttle and Its Operations
Astronaut John Grunsfeld, working from the end of the Shuttle Robotic Arm, installs replacement partson the Hubble Space Telescope during the final repair mission, STS-125 (2009).

which placed the arms straight up
alongside the head. Placement of the
shoulder joint was critical to a good fit,
but there were only a few sizes of
upper torsos for all crew members.
Some crew members had reasonably
good fit with the new joint, but others
suffered awkward placement of the
ring, which exerted abnormal forces on
the shoulders. This was more a
problem during training, when stress
on the shoulder joint was increased
due to gravity.
On Earth, the upper arm is held fairly
close to the body during work
activities. The shoulder joint is least
prone to injury in this position under
gravity. In space, the natural position
of the arms is quite different, with
arms extended in front of the torso.
Shoulders were not significantly
stressed by EVA tasks performed in
microgravity. In ground training,
however, it was difficult to make
EVA tools and equipment completely
neutrally buoyant, so astronauts often
held heavy tools with their shoulders
fully extended for long periods. Rotator
cuff injuries, tendonitis, and other
shoulder injuries occurred despite best
efforts to prevent them. The problem
was never fully resolved during the
shuttle era, given the design limitations
of the EVA suit and the intensity of
training required for mission success.
The Precision Air Bearing Floor, also
used for EVA training, is a 6-m (20-ft)
by 9-m (30-ft), highly polished steel
floor that works on the same principles
as an air hockey table. Large mock-ups
of flight hardware were attached to steel
plates that had high-pressure air forced
through tubes that ran along the bottom
and sides. These formed a cushion under
the mock-up that allowed the mock-up
to move easily in the horizontal plane,
simulating zero-gravity mass handling.
Despite the single plane limitation of the
Precision Air Bearing Floor, when
combined with neutral buoyancy
training the two facilities provided
comprehensive and valuable training of
moving large objects.
Another training and engineering
platform was the zero-gravity aircraft.
This specially outfitted KC-135
(later replaced by a DC-9) aircraft was
able to fly a parabolic trajectory that
provided approximately 20 seconds of
microgravity on the downward slope,
similar to the brief periods experienced
on a roller coaster. This platform was
not limited by water drag as was the
Weightless Environment Training
Facility, or to single plane evaluations
as was the Precision Air Bearing Floor;
however, it was only effective for
short-duration tasks. Therefore, the
zero-gravity aircraft was only used for
short events that required a
high-fidelity platform.
Extravehicular Activity Tools
EVA tools and support equipment are
the Rodney Dangerfield of spacewalks.
When they work, they are virtually
unnoticed; however, when they fail to
live up to expectations, everyone knows.
Looking at the cost of what appear to be
simple tools, similar to what might be
found at the local hardware store, one
wonders why they cost so much and
don’t always work. The reality is that
EVA tool engineers had a formidable
task—to design tools that could operate,
in vacuum, in temperatures both colder
than the Arctic and as hot as an oven,
and be operable by someone wearing the
equivalent of several pairs of ski gloves,
The Space Shuttle and Its Operations 121
Astronaut Dafydd Williams, STS-118, representing the Canadian Space Agency, is wearing a trainingversion of the extravehicular mobility unit spacesuit while participating in an underwater simulation of extravehicular activity in the Neutral Buoyancy Laboratory near Johnson Space Center.Scuba-equipped divers are in the water to assist Williams in his rehearsal, intended to help prepare him for work on the exterior of the International Space Station. Observe Williams holding the Pistol Grip Tool in his left hand with his shoulder extended. This position causes shoulder painduring training in neutral bouyancy.

in vacuum, while weightless. These
factors combined to produce a set of
competing constraints that was difficult
to balance. When adding that the
complete space environment cannot be
simulated on the ground, the challenge
for building specialized tools that
perform in space became clear. Any
discussion of tools invariably involves
the reasons why they fail and the lessons
learned from those failures.
EVA tools are identified from two
sources: the required EVA tasks, and
engineering judgment on what general
tools might be useful for unplanned
events. Many of the initial tools were
fairly simple—tethers, foot restraints,
sockets, and wrenches. There were also
specialized tools devoted to closing and
latching the payload bay doors. Many
tools were commercial tools available
to the public but that were modified for
use in space. This was thought to be a
cost savings since they were designed
for many of the same functions. These
tools proved to be adequate for many
uses; however, detailed information
was often unavailable for commercial
tools and they did not generally hold up
to the temperature extremes of space.
Material impurities made them
unpredictable at cold temperatures and
lubricants became too runny at high
temperatures, causing failures.
Therefore, engineers moved toward
custom tools made with high-grade
materials that were reliable across the
full temperature range.
Trunnion pin attachment device,
a-frame, and capture bar problems on
the early satellite repair flights were
found to be primarily due to incorrect
information on the satellite interfaces.
Engineers determined that interfering
objects weren’t represented on
satellite design drawings. After these
events, engineers stepped up efforts
to better document EVA interfaces,
but it is never possible to fully
document the precise configuration
of any individual spacecraft.
Sometimes drawings include a range of
options for components for which
many units will be produced, and
that will be manufactured over a long
period of time. Designers must also
have the flexibility to perform quick
fixes to minor problems to maintain
launch schedules. The balance between
providing precise documentation
and allowing design and processing
flexibility will always be a
judgment call and will, at times,
result in problems.
Engineers modified tools as they
learned about the tools’ performance in
space. White paint was originally used
as a thermal coating to keep tools from
getting too hot. Since tools bump
against objects and the paint tends to
chip, the paint did not hold up well
under normal EVA operations.
Engineers thus switched to an anodizing
process (similar to electroplating) to
make the tools more durable. Lubricants
were also a problem. Oil-based
lubricants would get too thick in cold
temperatures and inhibit moving parts
from operating. In warm environments,
the lubricants would become too thin.
Dry-film lubricants (primarily
Braycote®, which acts like Teflon® on
frying pans) became the choice for
almost all EVA tools because they are
not vulnerable to temperature changes
in the space environment.
Pistol Grip Tool
Some of the biggest problems with
tools came from attempting to expand
their use beyond the original purpose.
Sometimes new uses were very similar
to the original use, but the details were
different—like trying to use a hacksaw
to perform surgery. The saw is designed
for cutting, but the precision required is
extremely different. An example is the
computerized Pistol Grip Tool, which
was developed to actuate bolts while
providing fairly precise torque
information. This battery-operated tool
was similar to a powered screwdriver,
but had some sophisticated features
to allow flexibility in applying and
measuring different levels of torque or
angular rotation. The tool was designed
for Hubble, and the accuracy was more
than adequate for Hubble. When ISS
required a similar tool, the program
chose to purchase several units of the
Hubble power tool rather than design a
new tool specific to ISS requirements.
The standards for certification and
documentation were different for
Hubble. ISS had to reanalyze bolts,
provide for additional ground and
on-orbit processing of the Pistol Grip
Tool to meet ISS accuracy needs, and
provide additional units on orbit to
meet fault tolerance requirements and
maintain calibration.
The use of the Pistol Grip Tool for
ISS assembly also uncovered another
shortcoming with regard to using a tool
developed for a different spacecraft.
The Pistol Grip Tool was advertised as
having an accuracy of 10% around the
selected torque setting. This accuracy
was verified by setting the Pistol Grip
Tool in a fixed test stand on the ground
where it was held rigidly in place. This
was a valid characterization when used
on Hubble where EVA worksites were
designed to be easily accessible and
where the Pistol Grip Tool was used
directly on the bolts. It was relatively
easy for crew members to center the
tool and hold it steady on any bolt. ISS
worksites were not as elegant as Hubble
worksites, however, since ISS is such
a large vehicle and the Pistol Grip Tool
122 The Space Shuttle and Its Operations

The Space Shuttle and Its Operations 123
Worksite Interface APFR Attach Site
Articulating Portable Foot Restraint (APFR)Crew Positioning/Restraint Device
Pistol Grip Tool Powered, Computer-monitored Drive Tool
Safety TetherPrimary Life Line
Modular MiniWorkstation Tool Belt for Carryingand Stowing Tools
Body Restraint TetherLocal Crew Restraint
Simplified Aid For EVA Rescue Jet Pack for Emergency Rescue if Crew Inadvertently Released
APFR Attach SiteInterface WWo orksite lating Portable
Restraint (APFR) Positioning/aint Device
ew RestraintLocal CretherRestraint T Tether
Body APFR Attach SiteInterface
e
ew Restraint
oolsand Stowing T Toolsool Belt for CarryingTTool Belt for Carryingorkstation WWorkstation
Modular Mini
Emergen
ew gency Rescue if Cr
A Rescue
Safety TPrima
etherety T Tetherary Life Line
advertently Released
Inadvertently Released
oolDrive T ToolComputer-
ed, PowerPistol Grip T Tool ool
-monitor
Extravehicular Activity Tools
Astronaut Rick Mastracchio, STS-118 (2007), is shown using several extravehicular activity (EVA) tools while working on construction and maintenanceof the International Space Station during the shuttle mission’s third planned EVA activity.

often had to be used with socket
extensions and other attachments that
had inaccuracies of their own. Crew
members often had to hold the tool off
to the side with several attachments,
and the resulting side forces could
cause the torque measured by the tool
to be very different than the torque
actually applied. Unfortunately, ISS
bolts were designed and analyzed to the
advertised torque accuracy for Hubble
and they didn’t account for this
“man-in-the-loop” effect. The result
was a long test program to characterize
the accuracy of the Pistol Grip Tool
when used in representative ISS
worksites, followed by analysis of the
ISS bolts to this new accuracy.
To focus only on tool problems,
however, is a disservice. It’s like
winning the Super Bowl and only
talking about the fumbles. While use
of the Pistol Grip Tool caused some
problems as NASA learned about
its properties, it was still the most
sophisticated tool ever designed for
EVA. It provided a way to deliver
a variety of torque settings and
accurately measure the torque
delivered. Without this tool, the
assembly and maintenance of the
ISS would not have been possible.
Other Tools
NASA made other advancements in
tool development as well. Tools built
for previous programs were generally
simple tools required for collecting
geology samples. While there weren’t
many groundbreaking discoveries
in the tool development area, the
advances in tool function, storage,
and transport greatly improved EVA
efficiency during the course of the
program. The fact that Henry Ford
didn’t invent the internal combustion
engine doesn’t mean he didn’t make
tremendous contributions to the
automobile industry.
One area where tool engineers
expanded EVA capabilities was in
astronaut translation and worksite
restraint. Improvements were made to
the safety tether to include a more
reliable winding device and locking
crew hooks to prevent inadvertent
release. Engineers developed portable
foot restraints that could be moved
from one location to another, like
carrying a ladder from site to site.
The foot restraints consisted of a boot
plate to lock the crew member’s feet in
place and an adjustment knob to adjust
the orientation of the plate for better
positioning. The foot restraint had a
probe to plug into a socket at the
worksite. These foot restraints gave
crew members the stability to work in
an environment where unrestrained
crew members would have otherwise
been pushed away from the worksite
whenever they exerted force.
The portable foot restraints were an
excellent starting point, but they
required a fair amount of time to move.
They also became cumbersome when
crew members had to work in many
locations during a single EVA (as with
the ISS). Engineers developed tools that
could streamline the time to stabilize
at a new location. The Body Restraint
Tether is one of these tools. This tool
consists of a stack of balls connected
through its center by a cable with a
clamp on one end to attach to a handrail
and a bayonet probe on the other end
to attach to the spacesuit. Similar to
flexible shop lights, the Body Restraint
Tether can be bent and twisted to the
optimum position, then locked in that
position with a knob that tightens the
cable. The Body Restraint Tether is a
much quicker way for crew members to
secure themselves for lower-force tasks.
Another area where tool designers
made improvements was tool stowage
and transport. Crew members had to
string tools to their suits for transport
until designers developed sophisticated
tool bags and boxes that allowed crews
to carry a large number of tools and
use the tools efficiently at a worksite.
The Modular Mini Workstation—the
EVA tool belt—was developed to
attach to the extravehicular mobility
unit and has become invaluable to
conducting spacewalks. Specific tools
can be attached to the arms on the
workstation, thereby allowing ready
access to the most-used tools. Various
sizes of tool caddies and bags also
help to transport tools and EVA “trash”
(e.g., launch restraints).
Space Shuttle Program tool designers
expanded tool options to include
computer-operated electronics and
improved methods for crew restraint,
tool transport, and stowage. While
there were hiccups along the way, the
EVA tools and crew aids performed
admirably and expanded NASA’s
ability to perform more complicated
and increasingly congested EVAs.
Extravehicular Activity DuringConstruction of theInternational Space Station
From 1981 through 1996, the Space
Shuttle Program accomplished 33
EVAs. From 1997 through 2010, the
program managed 126 EVAs devoted
primarily to ISS assembly and
maintenance, with several Hubble
124 The Space Shuttle and Its Operations

Space Telescope repair missions also
included. Assembly and maintenance of
the ISS presented a series of challenges
for the program. EVA tools and suits
had to be turned around quickly and
flawlessly from one flight to the next.
Crew training had to be streamlined
since several flights would be training
at the same time and tasks were
interdependent from one flight to the
next. Plans for one flight, based on
previous flight results, could change
drastically just months (or weeks)
before launch. Sharing resources with
the International Space Station Program
was also new territory—the same tools,
spacesuits, and crew members would
serve both programs after the ISS
airlock was installed.
Extravehicular Loads forStructural Requirements
The EVA loads development program,
first started for the Hubble servicing
missions, helped define the ISS
structural design requirements. ISS was
the first program to have extensive
EVA performed on a range of structural
interfaces. The load cases for Hubble
repair had to protect the telescope
for a short period of EVA operations
and for a finite number of well-known
EVA tasks.
ISS load cases had to have sufficient
margin for tasks that were only partially
defined at the time the requirements
were fixed, to protect for hundreds of
EVAs over the planned life of the ISS.
The size of ISS was also a factor.
An EVA task on one end of the truss
structure could be much more
damaging than the same task closer to
the center (just like bouncing on the
end of a diving board creates more
stress at the base than bouncing on the
base itself). EVA loads had to account
for intentional tasks (e.g., driving bolts)
and unintentional events (e.g., pushing
away from a rotating structure to avoid
collision). Engineers had to protect
for a reasonable set of EVA scenarios
without overly restricting the ISS
design to protect against simultaneous
low-probability events. This required
an iterative process that included
working with ISS structures experts
to zero in on the right requirements.
A considerable test program—using a
range of EVA crew members executing
a variety of tasks in different ground
venues—characterized the forces and
The Space Shuttle and Its Operations 125
Medical Risks of Extravehicular Activity—Decompression SicknessOne risk spacewalkers share with scuba divers is decompression sickness, or “the
bends.” “The bends” name came from painful contortions of 19th-century underwater
caisson workers suffering from decompression sickness, which occurs when nitrogen
dissolves in blood and tissues while under pressure, and then expands when pressure
is lowered. Decompression sickness can occur when spacewalkers exit the pressurized
spacecraft into vacuum in a spacesuit
Decompression sickness can be prevented if nitrogen tissue concentrations are lowered
prior to reducing pressure. Breathing 100% oxygen causes nitrogen to migrate from
tissues into the bloodstream and lungs, exiting the body with exhaling. The first
shuttle-based extravehicular activities used a 4-hour in-suit oxygen prebreathe. This idle
time was inefficient and resulted in too long a crew day. New solutions were needed.
One solution was to lower shuttle cabin pressure from its nominal pressure of 101.2 kPa
(14.7 psi) to 70.3 kPa (10.2 psi) for at least 12 hours prior to the EVA. This reduced
cabin pressure protocol was efficient and effective, with only 40 minutes prebreathe.
Shuttle EVA crew members working International Space Station (ISS) construction
required a different approach. It is impossible to reduce large volume ISS pressure to
70.3 kPa (10.2 psi). To increase the rate of nitrogen release from tissues, crew
members exercised before EVA while breathing 100% oxygen. This worked, but it
added extra time to the packed EVA day and exhausted the crew. Planners used the
reduced cabin pressure protocol by isolating EVA crew members in the ISS airlock
the night before the EVA and lowering the pressure to 70.3 kPa (10.2 psi). This worked
well for the remainder of ISS EVAs, with no cases of decompression sickness
throughout the Space Shuttle Program.

moments that an EVA crew member
could impart. The resulting cases were
used throughout the programs to
evaluate new tasks when the tasks
were needed. While the work was done
primarily for ISS, the loads that had
been developed were used extensively
in the post-Columbia EVA inspection
and repair development.
Rescue From Inadvertent Release
NASA always provided for rescue of an
accidentally released EVA crew member
by maintaining enough fuel to fly to him
or her. Once ISS assembly began,
however, the Orbiter was docked during
EVAs and would not have been able to
detach and pursue an EVA crew member
in time. The ISS Program required a
self-rescue jet pack for use during ISS
EVAs. The Simplified Aid for EVA
Rescue was designed to meet this
requirement. Based on the manned
maneuvering unit design but greatly
simplified, the Simplified Aid for
EVA Rescue was a reliable, nitrogen-
propelled backpack that provided
limited capability for a crew member to
stop and fly back to the station or
Orbiter. It was successfully tested on
two shuttle flights when shuttle rescue
was still possible if something went
wrong. Fortunately, the Simplified Aid
for EVA Rescue never had to be
employed for crew rescue.
Extravehicular Activity Suit Life Extension and MultiuseCertification for International Space Station Support
A significant advancement for the
EVA suit was the development of a
regenerable carbon dioxide removal
system. Prior to the ISS, NASA used
single-use lithium hydroxide canisters
for scrubbing carbon dioxide during an
EVA. Multiple EVAs were routine
during flights to the ISS. Providing a
regenerative alternative using silver
oxide produced significant savings in
launch weight and volume. These
canisters could be cleaned in the ISS
airlock regenerator, thereby allowing
the canisters to be left on orbit rather
than processed on the ground and
launched on the shuttle. This
capability saved approximately 164 kg
(361 pounds) up-mass per year.
Training Capability Enhancements
During the early shuttle missions, the
Weightless Environment Training
Facility and Precision Air Bearing
Facility were sufficient for crew
training. To prepare for space station
assembly, however, virtually every
mission would include training for
three to five EVAs—often with two
EVA teams—with training for three to
five flights in progress simultaneously.
To do this, NASA built the Neutral
Buoyancy Laboratory to accommodate
EVA training for both the Space
Shuttle and ISS Programs. At 62 m
(202 ft) long, 31 m (102 ft) wide,
and 12 m (40 ft) deep, the Neutral
Buoyancy Laboratory is more than
twice the size of the previous
facility, and it dramatically increased
neutral buoyancy training capability.
It also allowed two simultaneous
simulations to be conducted using
two separate control rooms to manage
each individual event.
Trainers took advantage of other
resources not originally designed for
EVA training. The Virtual Reality
Laboratory, which was designed
primarily to assist in robotic operations,
126 The Space Shuttle and Its Operations
Astronaut Douglas Wheelock, STS-120 (2007), uses virtual reality hardware in the Space VehicleMockup Facility at Johnson Space Center to rehearse some of his duties on the upcoming mission tothe International Space Station.

became a regular EVA training venue.
This lab helped crew members train in
an environment that resembled the space
environment, from a crew member’s
viewpoint, by using payload and vehicle
engineering models working with
computer software to display a view that
changed as the crew member “moved”
around the space station.
The Virtual Reality Laboratory also
provided mass simulation capability
by using a system of cables and pulleys
controlled by a computer as well as
special goggles to give the right visual
cues to the crew member, thus
allowing him or her to get a sense of
moving a large object in a microgravity
environment. Most of the models used
in the Virtual Reality Laboratory were
actually built for other engineering
facilities, so the data were readily
available and parameters could be
changed relatively quickly to account
for hardware or environment changes.
This gave the lab a distinct advantage
over other venues that could not
accommodate changes as quickly.
In addition to the new training venues,
changes in training philosophy were
required to support ISS assembly.
Typically, EVA crew training began at
least 1 year prior to the scheduled
launch. Therefore, crew members for
four to five missions would have to
train at the same time, and the tasks
required were completely dependent on
the previous flights’ accomplishments.
A hiccup in on-orbit operations could
cascade to all subsequent flights,
changing the tasks that were currently
in training. In addition, on-orbit ISS
failures often resulted in changes to the
tasks, as repair of those components
may have taken a higher priority.
To accommodate late changes, flight
controllers concentrated on training
individual tasks rather than timelines
early in the training schedule. They also
engaged in skills training—training the
crew on general skills required to
perform EVAs on the ISS rather than
individual tasks. Flight controllers still
developed timelines, but they held off
training the timelines until closer to
flight. Crews also trained on “get-
ahead” tasks—those tasks that did not
fit into the pre-mission timelines but
that could be added if time became
available. This flexibility provided time
to allow for real-time difficulties.
Extravehicular ActivityParticipation in Return to Flight After Space ShuttleColumbia Accident
One other significant EVA
accomplishment was the development
of a repair capability for the Orbiter
Thermal Protection System after the
Space Shuttle Columbia accident in
2003. This posed a significant
challenge for EVA for several reasons.
The Thermal Protection System was a
complex design that was resistant to
high temperatures but was also
delicate. It was located in areas under
the fuselage that was inaccessible to
EVA crew members. The materials
used for repair were a challenge to
work with, even in an Earth
environment, since they did not adhere
well to the damage. Finally, the repair
had to be smooth since even very small
rough edges or large surface deviations
could cause turbulent airflow behind
the repair, like rocks disrupting flow
in a stream. Turbulent flow increased
surface heating dramatically, with
potentially disastrous results. These
challenges, along with the schedule
pressure to resume building and
resupplying the ISS, made Thermal
Protection System repair a top priority
for EVA for several years.
The process included using repair
materials that engineers originally
began developing at the beginning of
the program that now had to be refined
and certified for flight. Unique tools
and equipment, crew procedures, and
methods to ensure stabilizing the crew
member at the worksite were required
to apply the material. The tools
mixed the two-part silicone rubber
repair material but also kept it from
hardening until it was dispensed in
The Space Shuttle and Its Operations 127
Astronauts Robert Curbeam (foreground) and Rex Walheim (background) simulate tile repair,using materials and tools developed after theSpace Shuttle Columbia accident, on board thezero-gravity training aircraft KC-135.

the damage area. The tools also
maintained the materials within a fairly
tight thermal range to keep them
viable. Engineers were able to avoid
the complexity of battery-powered
heaters by selecting materials and
coatings to passively control the
material temperature. The reinforced
carbon-carbon Thermal Protection
System (used on the wing leading
edge) repair required an additional set
of tools and techniques with similar
considerations regarding precision
application of sensitive materials.
Getting a crew member to the worksite
proved to be a unique challenge. NASA
considered several options, including
using the Simplified Aid for EVA
Rescue with restraint aids attached by
adhesives. Repair developers
determined, however, that the best
option was to use the new robotic arm
extension boom provided for Orbiter
inspection. The main challenge to using
the extension boom was proving that it
was stable enough to conduct repairs,
and that the forces the EVA crew
member imparted on the boom would
not damage the boom or the arm.
These concerns were similar to those
involved with putting a crew member
on a robotic arm, but the “diving board”
was twice as long. The EVA loads
work performed earlier provided a
foundation for the process by which
EVA loads could be determined for
this situation; however, the process
had to be modified since the work
platform was much more flexible.
Previous investigations into EVA
loads usually involved a crew member
imparting loads into a fixed platform.
When the loads were continuously
applied to the boom/arm configuration,
they resulted in a large (about 1.2 m
[4 ft]) amount of sway as well as
structural concerns for the arm and
boom. Engineers knew that the
boom/arm configuration was more like
a diving board than a floor, meaning
that the boom would slip away as force
was applied, limiting the force a crew
member could put into the system.
Engineers developed a sophisticated
boom/arm simulator and used it on the
precision air bearing floor to measure
EVA loads. These tests provided the
data for analysis of the boom/arm
motion. The work culminated in a flight
test on STS-121 (2006), which
demonstrated that the boom/arm was
stable enough for repair and able to
withstand reasonable EVA motions
without damage.
Although the repair capability was
never used, both the shuttle and the
space station benefited from the repair
development effort. Engineers made
several minor repairs to the shuttle
Thermal Protection System that would
not have been possible without
demonstrating that the EVA crew
member could safely work near the
fragile system. The boom was also used
on the Space Station Robotic Arm to
conduct a successful repair of a
damaged station solar array wing that
was not reachable any other way.
128 The Space Shuttle and Its Operations
Astronaut Piers Sellers, STS-121 (2006), wearing a training version of the extravehicular mobility unit,participates in an extravehicular activity simulation while anchored on the end of the training versionof the Shuttle Robotic Arm in the Space Vehicle Mockup Facility at Johnson Space Center (JSC). The arm has an attached 15-m (50-ft) boom used to reach underneath the Orbiter to access tiles. Lora Bailey (right), manager, JSC Engineering Tile Repair, assisted Sellers.

Summary
The legacy of EVA during the Space
Shuttle Program consists of both the
actual work that was done and the
dramatic expansion of the EVA
capability. EVA was used to successfully
repair or restore significant national
resources to their full capacity, such
as Hubble, communications satellites,
and the Orbiter, and to construct the
ISS. EVA advanced from being a minor
capability used sparingly to becoming
a significant part of almost every
shuttle mission, with an increasing
list of tasks that EVA crew members
were able to perform. EVA tools and
support equipment provided more
capability than ever before, with
battery-powered and computer-
controlled tools being well understood
and highly reliable.
Much was learned about what an
EVA crew member needs to survive
and work in a harsh environment
as well as how an EVA crew member
affected his or her environment.
This tremendous expansion in EVA
capability will substantially benefit
the future exploration of the solar
system as engineers design vehicles
and missions knowing that EVA crew
members are able to do much more
than they could at the beginning of the
Space Shuttle Program.
The Space Shuttle and Its Operations 129
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
1983
1984
1985
1986
1987
1988
1989
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
2009
2010
2011
April 1983: First Shuttle EVA (STS-6)
April 1984: Shuttle EVA Repair, SolarMax (STS-41C)
November 1984: Palapa, Westar Retrieval EVAs (STS-51A)
August 1985: First Shuttle Unscheduled EVA, Least Deploy (STS-51I)
April 1991: First EVA After Challenger Accident, Compton Gamma Ray Observatory Unscheduled EVA (STS-37)
May 1992: First Three-person EVA, Intelsat Retrieval, and Repair EVAs (STS-49)
December 1993: First Hubble Space Telescope Repair Mission (STS-61)
December 1998: First ISS Assembly EVA (STS-88)
December 2000: First ISS UnscheduledEVA, Solar Array Repair (STS-97)
July 2005: First EVA After Columbia Accident, First EVA on Orbiter Belly to Remove Protruding Gap Filler (STS-114)
February 1, 2003: Columbia Accident
January 28, 1986: Challenger Accident
October 2007: First EVA from Orbiter Inspection and Repair Boom to Repair ISS Solar Array Blanket (STS-120)
Gemini — 9
Apollo — 19
Shuttle (including EVAs while at ISS) — 162
= Shuttle Stand-alone EVAs
= Shuttle EVAs while at ISSSkylab — 10
ISS Stand-alone — 19
EVA Totals Per Program
Num
ber
of
Sp
ace
Shu
ttle
Pro
gra
m E
xtra
vehi
cula
r A
ctiv
ities
EVA = Extravehicular Activity
ISS = International Space Station
Major Extravehicular Activity Milestones