drawing a skeleton fast from motion capture data jonathan kipling knight nov 7, 2006
Post on 21-Dec-2015
259 views
TRANSCRIPT
Drawing a Skeleton Fast FromMotion Capture Data
Jonathan Kipling Knight
Nov 7, 2006

7 Nov 2006 JKK 2
Introduction
• Purpose
• Motion Capture
• Data Files
• Skeleton Formation
• Closed Form Solution
• Conclusion
7 Nov 2006 JKK 3
Purpose
• Draw an articulated framework of solid segments connected by joints.
• Use live data capture to draw figure.
7 Nov 2006 JKK 4
Motion Capture
• Magnetic Trackers• Position and Orientation Transmitted
• Light Dots• 3D Position if in view
• Figure Tracking• Computer vision and image analysis
7 Nov 2006 JKK 5
Motion Capture Session
05_05
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.
7 Nov 2006 JKK 6
Data Files
• No international standard• Proprietary, semi-open formats
• C3D oldest from Dr. Andrew Dainis• Bad Data
• Users partially fill fields• Units incorrect• Frame rate incorrect• Signed/unsigned mismatches
7 Nov 2006 JKK 7
Producing a Skeleton
• Single Time Frame• Produce position, size and orientation of
each segment• Markers are fixed 3D positions on segment• Orientation is included with magnetic
trackers• Rotation Points are fixed on TWO
segments but are not in data
7 Nov 2006 JKK 8
Producing a Skeleton
• How to Move Between Frames• Inverse Kinematics popular• Forward and Inverse Kinetics• Closed Form Solutions
7 Nov 2006 JKK 9
Inverse Kinematics
• What joint angles are needed to get to next position and orientation?
• Good for filling in large frame gaps
• Sometimes more than one answer
7 Nov 2006 JKK 10
Inverse Kinematics Example
QuickTime™ and aCinepak decompressor
are needed to see this picture.
7 Nov 2006 JKK 11
Closed Form Solution
• Requires 1-3 positions on each segment
• Each frame independently drawn
• Quickest O(26N)
• As accurate as data O(/N)
7 Nov 2006 JKK 12
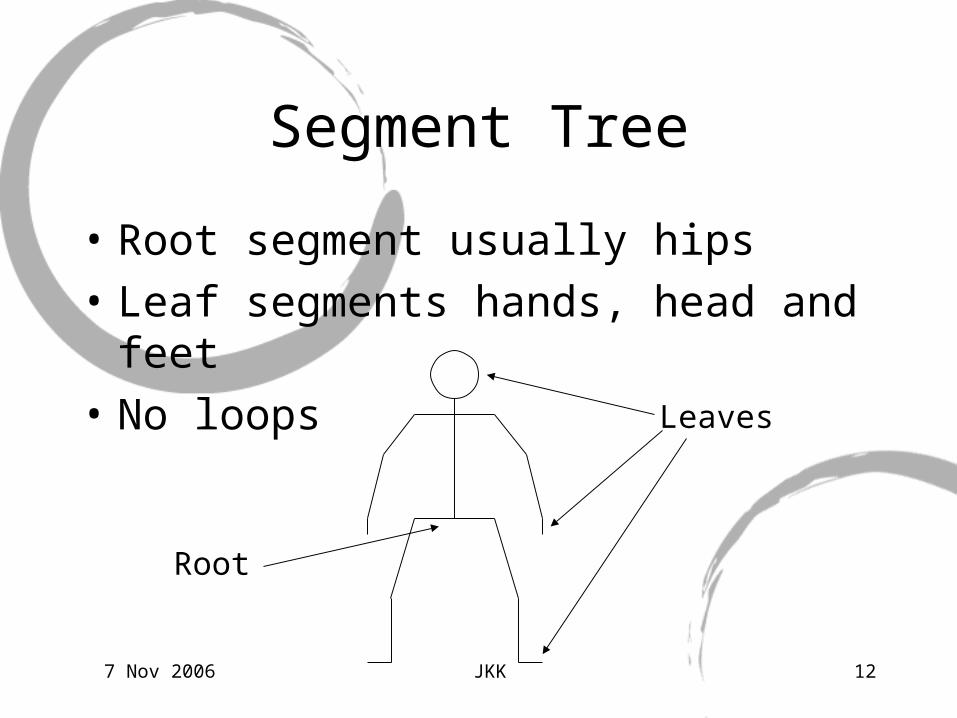
Segment Tree
• Root segment usually hips
• Leaf segments hands, head and feet
• No loops
Root
Leaves
7 Nov 2006 JKK 13
Solve Sphere at Each Joint
• One marker on child produces sphere around joint relative to parent
• Must know orientation of parent• 1-3 markers needed or• Magnetic trackers
7 Nov 2006 JKK 14
Three Point Orientation
• Three Orthogonal Axes
€
rx =
r p 2 −
r p 1
€
rz =
r x ×
r p 3 −
r p 1( )
€
ry =
r z ×
r x
7 Nov 2006 JKK 15
Two Point Orientation
• Three Orthogonal Axes
€
rx =
r p 2 −
r p 1
€
rz =
r x ×
r c −
r p 1( )
€
ry =
r z ×
r x
7 Nov 2006 JKK 16
One Point Orientation
• Three Orthogonal Axes
€
rx =
r c −
r p 1
€
rz =
r x ×
r n
€
ry =
r z ×
r x

7 Nov 2006 JKK 17
Center of Sphere
• Asymptotically Unbiased Generalized Delogne-Kåsa Method
€
rc =
r m + 1
2 C− ˆ σ 2( )−1r
s
€
rm = 1
N
r ′ p i
i=1
N
∑
€
C = 1N −1
r ′ p i −
r m ( )
r ′ p i −
r m ( )
T
i=1
N
∑
€
rs = 1
N −1
r ′ p i −
r m ( )
r ′ p i −
r m ( )
T r ′ p i −
r m ( )
i=1
N
∑
7 Nov 2006 JKK 18
UGDK
• Asymptotically unbiased if measurement error estimate is correct
• Fastest known O(26N)
• Cholesky inverse of 3x3 matrix
€
limN→∞
Er c ( ) =
r c 0
€
Covr ′ p i( ) = ˆ σ 2I
7 Nov 2006 JKK 19
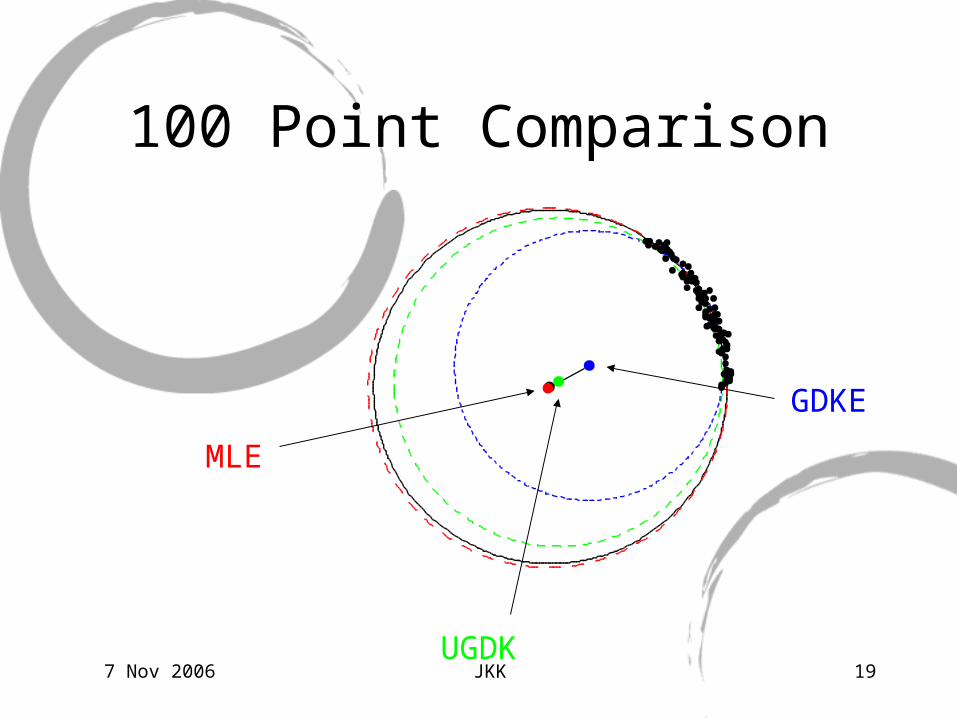
100 Point Comparison
MLE
GDKE
UGDK
7 Nov 2006 JKK 20
Marker Requirements
• 3 Markers on root segment of tree
• 1-3 Markers on all other segments
• Segments with 1 Marker should have one degree of freedom (e.g.knee,elbow)
7 Nov 2006 JKK 21
Break Dance
QuickTime™ and aMotion JPEG B decompressor
are needed to see this picture.
7 Nov 2006 JKK 22
Salsa Dance
QuickTime™ and aMotion JPEG B decompressor
are needed to see this picture.
7 Nov 2006 JKK 23
Conclusion
• UGDK is fastest available sphere solution O(26N)
• Asymptotically unbiased answer
• As accurate as data O(/N)
• 1-3 Marker requirements per segment
• Provides skeleton to attach solid shape