The Hive is Hungry: Exploring Bee Colony Search and Foraging Behavior through Simulation
Peter Bailis, Peter LiflandHarvard Robobees
11 Dec 2009

Overview
• Bee Colony Foraging Simulator
– Behavior model derived from Seeley
– Several simplifying assumptions:
• 2D world, no real physics, etc.
– Many modeled features:
• Bee waggle dance communication semantics, flight inaccuracy, etc.
• Focus on scouting, food source allocation

Benefits
• CS182 (AI w/ Professor Nagpal) Final Project
• Colony Team
– Reasonably complete search algorithm simulator
– Robust platform for testing—many knobs
– Potentially adaptable to helicopter simulation
• Search strategy analysis
– Several surprising results, despite relatively simple agent behavior
How do bees work?
• Bees “advertise” food sources they've found to other bees through a “waggle dance” performed in the hive.
– This is similar to local beam search.
– Better source == longer dance
• Approximately 10% of bees without an assigned food source scout for new food sources
• “Optimizes” for maximum food gathered per energy

Our Approach
• Build simulator in Python (appx. 800 lines)
• Test scout strategies (exact methods are not known)
– Random walk, random points, random world traversal, spirals
• Test food heuristics
– Real bees basically choose randomly from dancing bees
– What if we perturb this?Closest food, Greatest quantity of food, Furthest food,
Balance of quantity and distance?
Demo

Spirals

Random Walk

Distance-Food Selection Metric
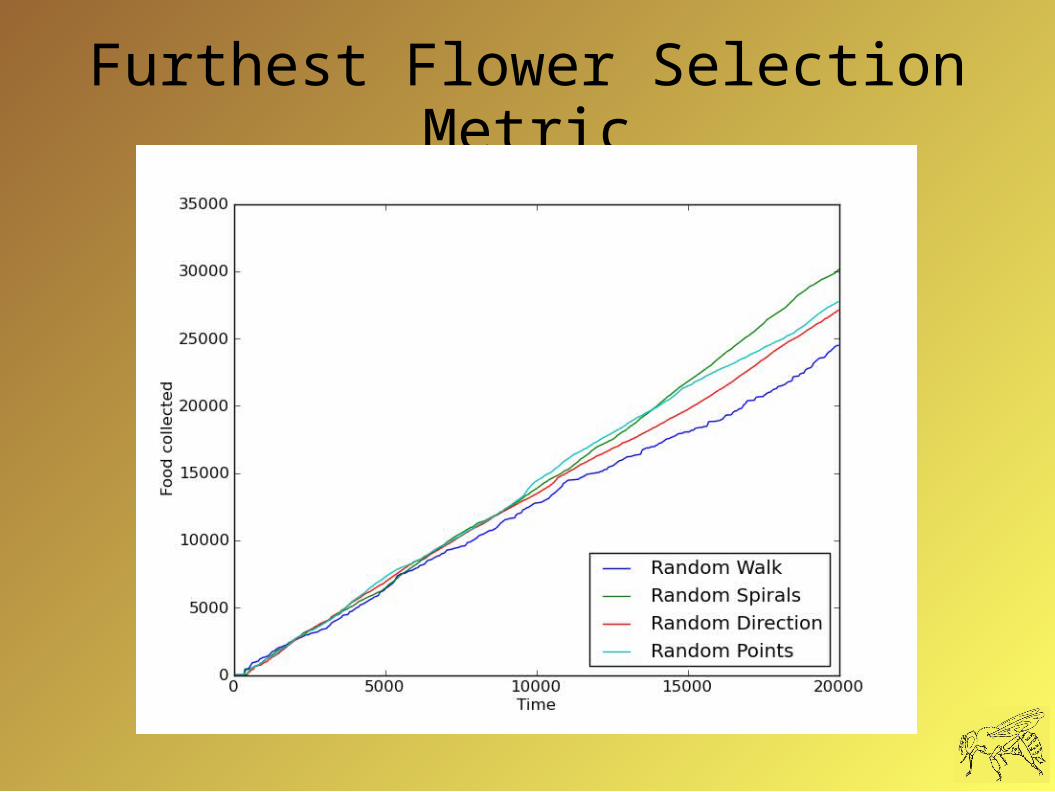
Furthest Flower Selection Metric

Results, cont.
Probabilistic Best Flower Closest Flower Furthest Flower Dist-Quantity Metric
Random Walk 64.68% 82.85% 79.77% 82.46% 80.47%
Spirals 96.31% 100.00% 97.17% 98.09% 95.79%
Traverse World 71.63% 71.52% 80.72% 75.44% 74.72%
Random Points 96.50% 95.76% 92.65% 87.38% 99.91%
Probabilistic Best Flower Closest Flower Furthest Flower Dist-Quantity Metric
Random Walk 39.65% 69.35% 75.14% 74.17% 84.27%
Spirals 82.75% 85.14% 80.41% 89.98% 100.00%
Traverse World 87.11% 95.45% 93.98% 94.99% 93.50%
Random Points 82.99% 88.91% 84.72% 89.97% 88.80%
Normal World
Food Scarce World
Fin
Open source: http://code.google.com/p/beesim

References
• robobees.seas.harvard.edu
• Seeley, Thomas D. Wisdom of the Hive: The Social Physiology of Honey Bee Colonies. Cambridge, Mass: Harvard UP, 1995. Print.







