Download - Talos Keynote

Tecniche algoritmiche e strumenti software per lo studio
di patrolling security games
AI & R LabLaboratorio di Intelligenza Arti!ciale e Robotica
del Politecnico di Milano
Relatore: Prof. Nicola GattiCorrelatore: Ing. Nicola Basilico
Testa Pietro720861
20 Dicembre 2010
Politecnico di Milano
Sommario• Obiettivi
• Parte I - Introduzione
- Il problema del pattugliamento
- Patrolling security games
- Modello in uso
• Parte II - Contributi
- Tecniche di riduzione
- Lo strumento software, Talos
- Demo
• Parte III - Valutazioni sperimentali e conclusioni
220-12-2010 Testa Pietro
• Estendere lo stato dell’arte del pattugliamento strategico con delle tecniche di riduzione che permettano la risoluzione di problemi di grandi dimensioni
• Sviluppare una soluzione software completa, dalla composizione del problema alla sua risoluzione, analisi e comparazione delle strategie prodotte
320-12-2010 Testa Pietro
Obiettivi
Il pattugliamento
420-12-2010 Testa Pietro
Part
e I -
Intr
oduz
ione • Un ambiente da proteggere
• Uno o più robot pattugliatori
• Un intruso che vuole violare l’area
• Lo scopo è quello di garantire la sicurezza dell’ambiente o di alcune aree de!nite come gli obiettivi
Patrolling security games
520-12-2010 Testa Pietro
Part
e I -
Intr
oduz
ione
• I diversi approcci possono essere declinati secondo:
- Tipologia di ambiente
- Funzione obiettivo
- Presenza di avversari e loro caratterizzazione
• I metodi più recenti prendono ispirazione dalla teoria dei giochi
• La strategia di pattugliamento si traduce nella ricerca dell’equilibrio di quel gioco
Il modello BGA - I
620-12-2010 Testa Pietro
Part
e I -
Intr
oduz
ione
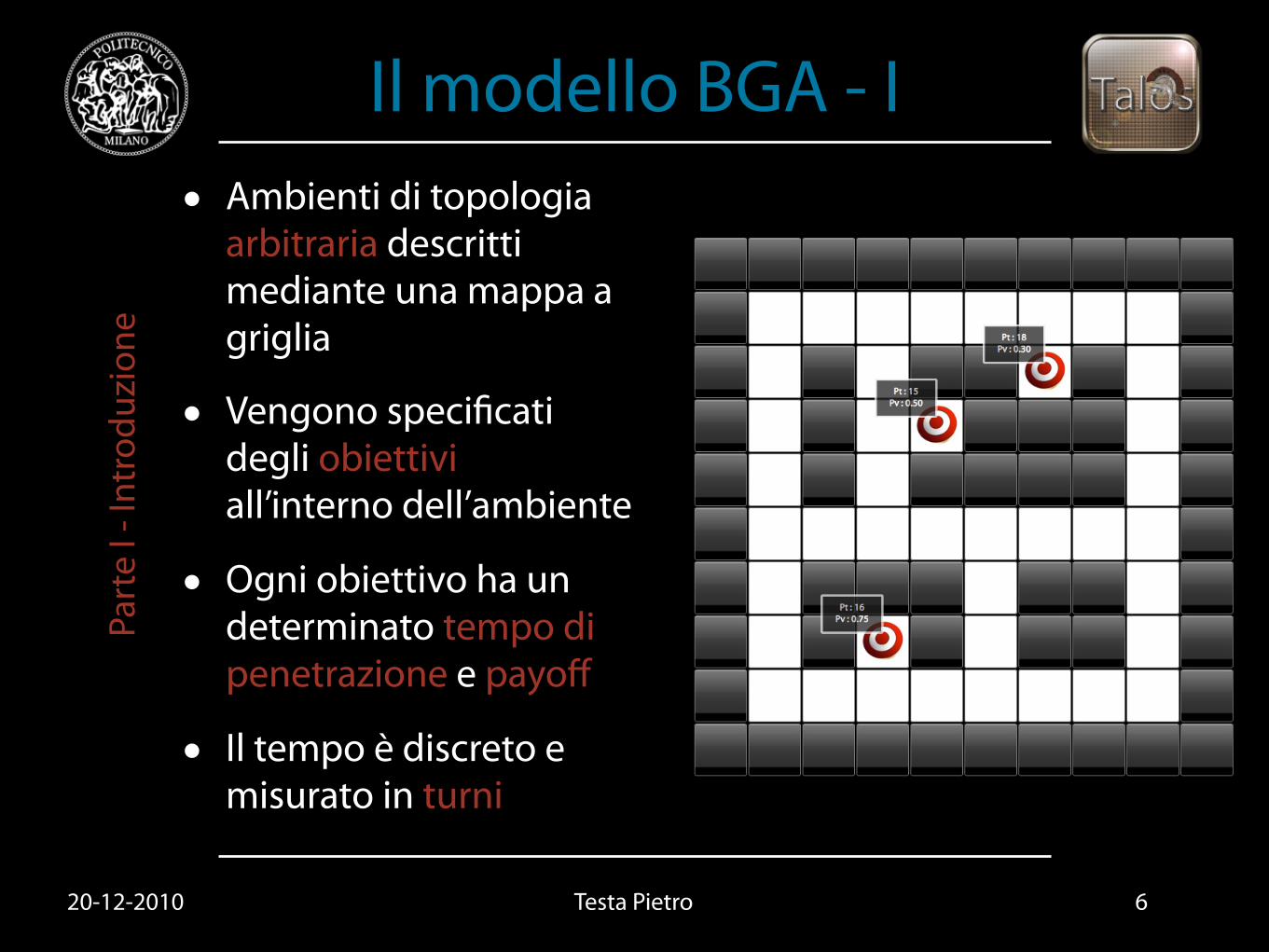
• Ambienti di topologia arbitraria descritti mediante una mappa a griglia
• Vengono speci!cati degli obiettivi all’interno dell’ambiente
• Ogni obiettivo ha un determinato tempo di penetrazione e payo"
• Il tempo è discreto e misurato in turni
Il modello BGA - II
720-12-2010 Testa Pietro
Part
e I -
Intr
oduz
ione
• Le azioni che i due agenti possono compiere sono diverse
- Il pattugliatore si muove tra celle adiacenti sulla mappa mediante l’azione move(j)
- L’intruso è fuori dall’ambiente, quando e se decide di entrare può farlo direttamente in un obiettivo mediante l’azione enter-when(t,i)
• La soluzione del gioco si traduce nella ricerca di un equilibrio leader-follower
! Cattura dell’intruso
! Violazione di un obiettivo
! L’intruso decide di non entrare
Tecniche di riduzione - I
820-12-2010 Testa Pietro
Part
e II
- Con
trib
uti
• Attualmente gli algoritmi sono basati su programmazione matematica
• Necessità di ridurre la dimensione del problema per permettere la risoluzione di scenari di pattugliamento signi!cativi
!Eliminazione delle strategie dominate
!Astrazioni senza perdita di informazione
!Astrazioni con perdita di informazione
Tecniche di riduzione - II
920-12-2010 Testa Pietro
Part
e II
- Con
trib
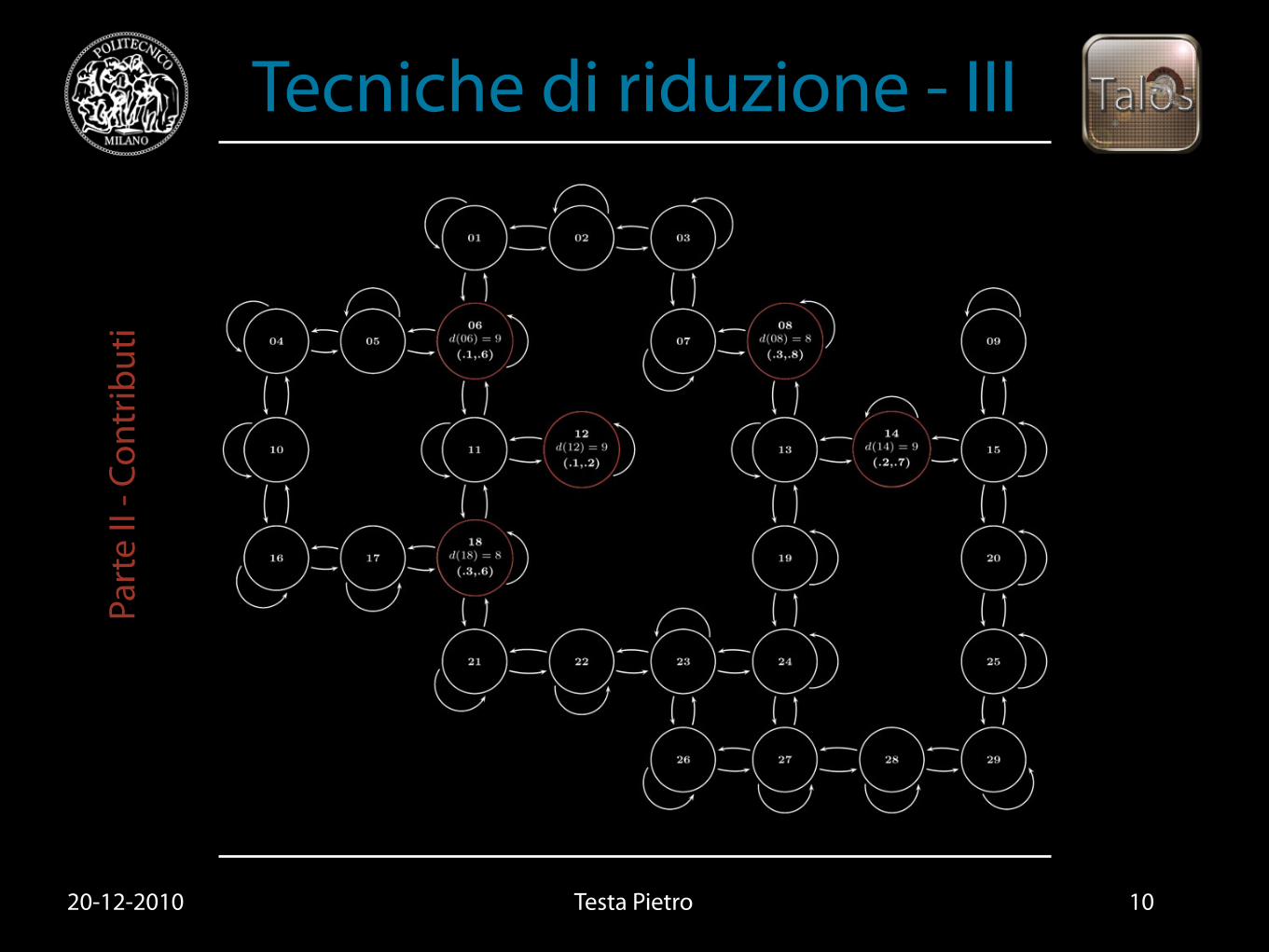
uti • Mediante alberi di ricerca riduciamo lo
spazio delle azioni dell’intruso eliminando le azioni enter-when(t,i) ad utilità minore
• Per il calcolo delle astrazioni imponiamo dei vincoli sui nodi rimossi, selezionati mediante problemi di programmazione intera
Tecniche di riduzione - III
1020-12-2010 Testa Pietro
Part
e II
- Con
trib
uti

Tecniche di riduzione - III
1020-12-2010 Testa Pietro
Part
e II
- Con
trib
uti

Tecniche di riduzione - III
1020-12-2010 Testa Pietro
Part
e II
- Con
trib
uti
Talos - I
1120-12-2010 Testa Pietro
Part
e II
- Con
trib
uti
• La risoluzione di problemi più grandi necessita di uno strumento che sempli!chi l’utilizzo attraverso l’uso di un’interfaccia gra!ca
• Migliora la metodologia utilizzando in maniera automatizzata i metodi !n qui esposti
• Prevede meccanismi di confronto tra i risultati strategici prodotti a fronte di variazioni dei parametri
• Permette la creazione e condivisione di un dataset tra i diversi utenti
Talos - II
1220-12-2010 Testa Pietro
Part
e II
- Con
trib
uti
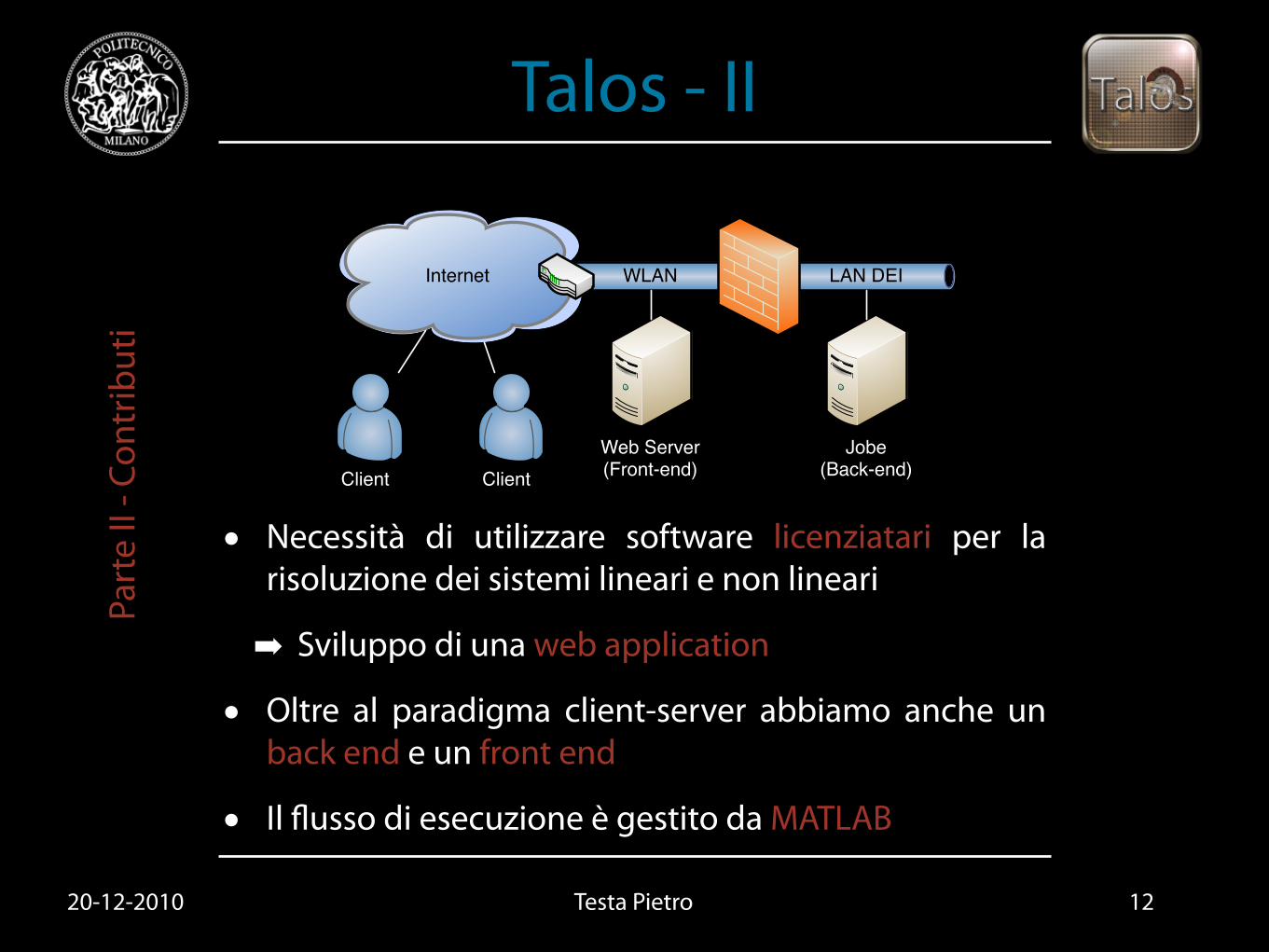
Internet LAN DEIWLAN
Jobe(Back-end)
Web Server(Front-end)Client Client
Firewall
• Necessità di utilizzare software licenziatari per la risoluzione dei sistemi lineari e non lineari
! Sviluppo di una web application
• Oltre al paradigma client-server abbiamo anche un back end e un front end
• Il #usso di esecuzione è gestito da MATLAB
Demo
20-12-2010 Testa Pietro
Part
e II
- Con
trib
uti
13
Prove sperimentali
1420-12-2010 Testa Pietro
Part
e III
- Va
luta
zion
i sp
erim
enta
li e
conc
lusio
ni
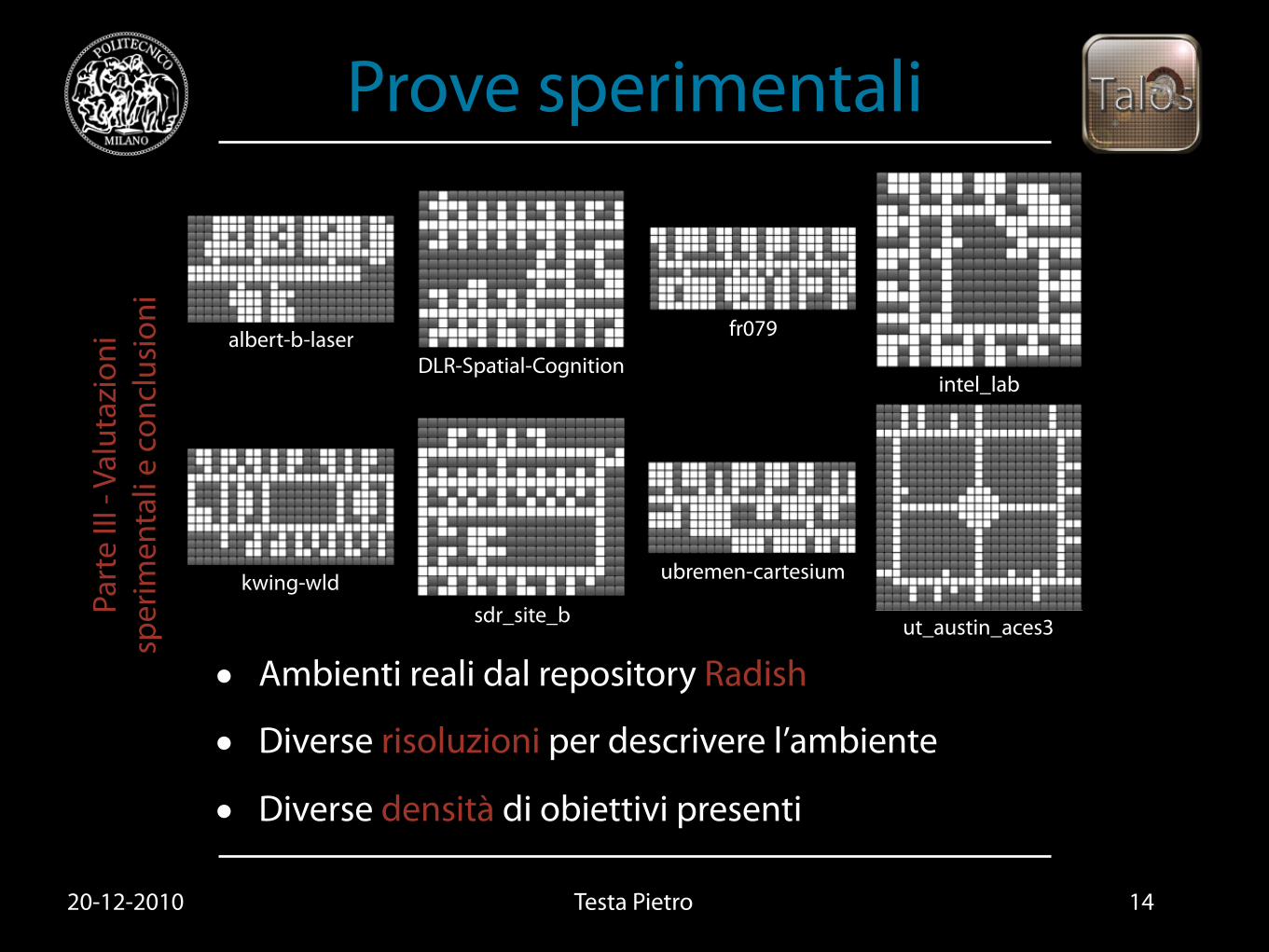
albert-b-laser
ut_austin_aces3
DLR-Spatial-Cognition
fr079
intel_lab
kwing-wldsdr_site_b
ubremen-cartesium
• Ambienti reali dal repository Radish
• Diverse risoluzioni per descrivere l’ambiente
• Diverse densità di obiettivi presenti
1520-12-2010 Testa Pietro
Part
e III
- Va
luta
zion
i sp
erim
enta
li e
conc
lusio
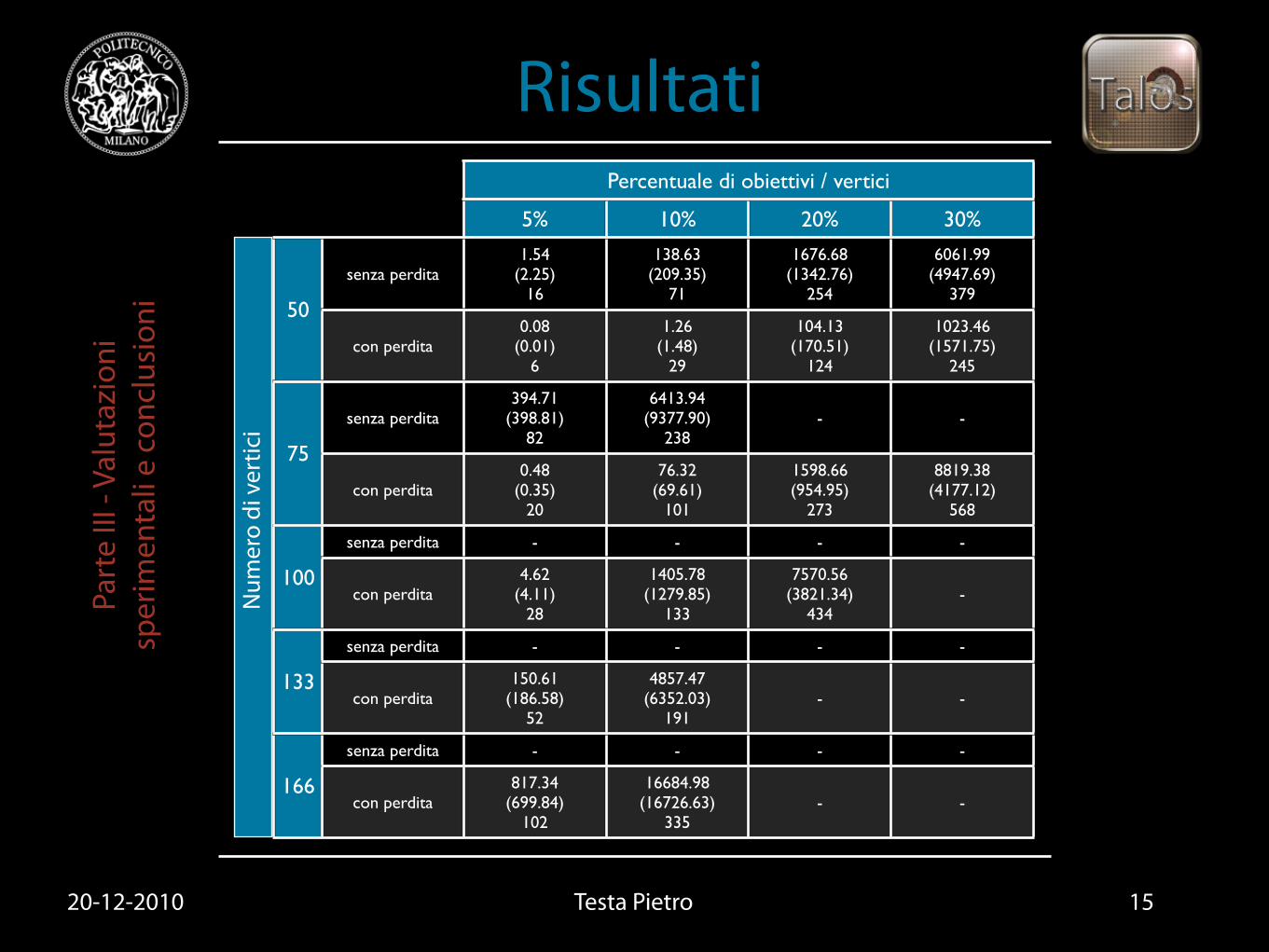
niRisultati
Percentuale di obiettivi / verticiPercentuale di obiettivi / verticiPercentuale di obiettivi / verticiPercentuale di obiettivi / vertici
5% 10% 20% 30%
5050
7575
100100
133133
166166
senza perdita1.54
(2.25)16
138.63(209.35)
71
1676.68(1342.76)
254
6061.99(4947.69)
379
con perdita0.08
(0.01)6
1.26(1.48)
29
104.13(170.51)
124
1023.46(1571.75)
245
senza perdita394.71
(398.81)82
6413.94(9377.90)
238- -
con perdita0.48
(0.35)20
76.32(69.61)
101
1598.66(954.95)
273
8819.38(4177.12)
568
senza perdita - - - -
con perdita4.62
(4.11)28
1405.78(1279.85)
133
7570.56(3821.34)
434-
senza perdita - - - -
con perdita150.61
(186.58)52
4857.47(6352.03)
191- -
senza perdita - - - -
con perdita817.34
(699.84)102
16684.98(16726.63)
335- -
Num
ero
di v
ertic
i
Conclusioni
1620-12-2010 Testa Pietro
Part
e III
- Va
luta
zion
i sp
erim
enta
li e
conc
lusio
ni
• Le tecniche di riduzione proposte hanno permesso la risoluzione di problemi che prima non erano nemmeno trattabili per la quantità di memoria richiesta
• Le astrazioni con perdita di informazione hanno dimostrato di essere estremamente potenti
• Talos ha permesso di r isolvere un considerevole numero di problemi in breve tempo accumulandoli nel sistema a pila
Sviluppi futuri
1720-12-2010 Testa Pietro
Part
e III
- Va
luta
zion
i sp
erim
enta
li e
conc
lusio
ni • L’estensione più rilevante è senz’altro il caso multi-agente permettendoci di ridurre la complessità del problema attraverso il paradigma del divide et impera
• Aggiungere nuovi algoritmi per il calcolo delle strategie
1820-12-2010 Testa Pietro
La presentazione è conclusa.Grazie per l’attenzione.

Tecniche algoritmiche e strumenti software per lo studio
di patrolling security games
AI & R LabLaboratorio di Intelligenza Arti!ciale e Robotica
del Politecnico di Milano
Relatore: Prof. Nicola GattiCorrelatore: Ing. Nicola Basilico
Testa Pietro720861
20 Dicembre 2010
Politecnico di Milano







