dems: a data mining based technique to handle missing data in mobile sensor network applications le...
TRANSCRIPT

DEMS: A Data Mining Based Technique to Handle Missing Data in Mobile Sensor Network Applications
Le Gruenwald Md. Shiblee Sadik Rahul Shukla Hanqing Yang
School of Computer ScienceUniversity of Oklahoma
Norman, Oklahoma, [email protected]

Outline
2
Research objective Current approaches The proposed approach: DEMS Performance Evaluation Conclusions and future work

Mobile Sensor Networks
3
A typical mobile sensor network: Sensor nodes are provided with motion capabilities Sensor nodes can relocate themselves Sensor nodes may move continuously/randomly Sensor nodes may move periodically to make up for
lost/missing sensors Sensor nodes send data to a base station.

Missing Sensor Data
4
Missing sensor data = sensor readings that fail to reach the base station or are corrupted when reaching the base station
Reasons for missing sensor data: Power shortage (sensor nodes are battery-powered) Mal-functioning of sensor nodes (hardware failure) Networking issues
Connection failures Data package collision
etc.
Research Objective
5
Goal: Develop an effective algorithm to estimate missing sensors’ readings in a mobile sensor network application.

Research Issues Issues common with static sensor networks:
Infiniteness, fast arrival rate, concept drifts
Additional issues: due to mobility of mobile sensors Spatial relations:
The spatial relation between two sensors’ readings is distorted by the mobility of mobile sensors
Temporal relations: The history data of a mobile sensor that are generated at different
locations may not necessarily possess the temporal relationships with the data in the current round of sensor readings
Frequent power failure Power outage is more common in mobile sensor network compared to
static sensor network because mobility requires excessive power.
6

Current Approaches
7
Ignore missing data
Ask the sensor again Add redundant sensors
Estimate missing data
Available approaches
Use average of other sensors
Use auto-regression model
Use some other statistics based model (e.g., Kalman filter)
Use data mining-based model
Fig 1. A taxonomy of techniques for handling missing data
Statistics based techniques

The Proposed Approach: DEMS
8
DEMS: Data Estimation for Mobile Sensors Based on two important concepts:
Virtual Static Sensor (VSS) A fictitious static sensor which mimics a real static sensor
helps reconstruct the spatial and temporal relations among the sensors’ readings
Association Rule Mining A popular method of discovering relationships among different items
helps explore the relationships among sensors’ readings.

DEMS Components DEMS has three major components:
Mapping Real Mobile Sensor (RMS) to Virtual Static Sensor (VSS) Divides the entire area of coverage into small hexagons A hexagon: the coverage area of a VSS with VSS being at the center of the
hexagon Converts RMS readings into VSS readings
Association rule mining Constructs a novel data structure called MASTER-tree to capture the association
rules among VSSs Updates MASTER-trees to capture the most recent association rules among
VSSs Data estimation
Uses the most recent association rules to estimate a missing VSS reading Uses the estimated value of the missing VSS reading as the value of the
missing RMS reading.
9

DEMS: Mapping RSS to VSS What is VSS?
A VSS is a fictitious static sensor A VSS reading is based on one or more RMSs’ readings A VSS has a unique identifier and has a unique area of
coverage Why do we need VSS?
Each VSS has a fixed location; hence the spatial relations among VSSs readings can be obtained
Each VSS reading is generated from a fixed location; hence history readings might have strong temporal relations with the current reading.
10
DEMS: Mapping RSS to VSS (Cont.)
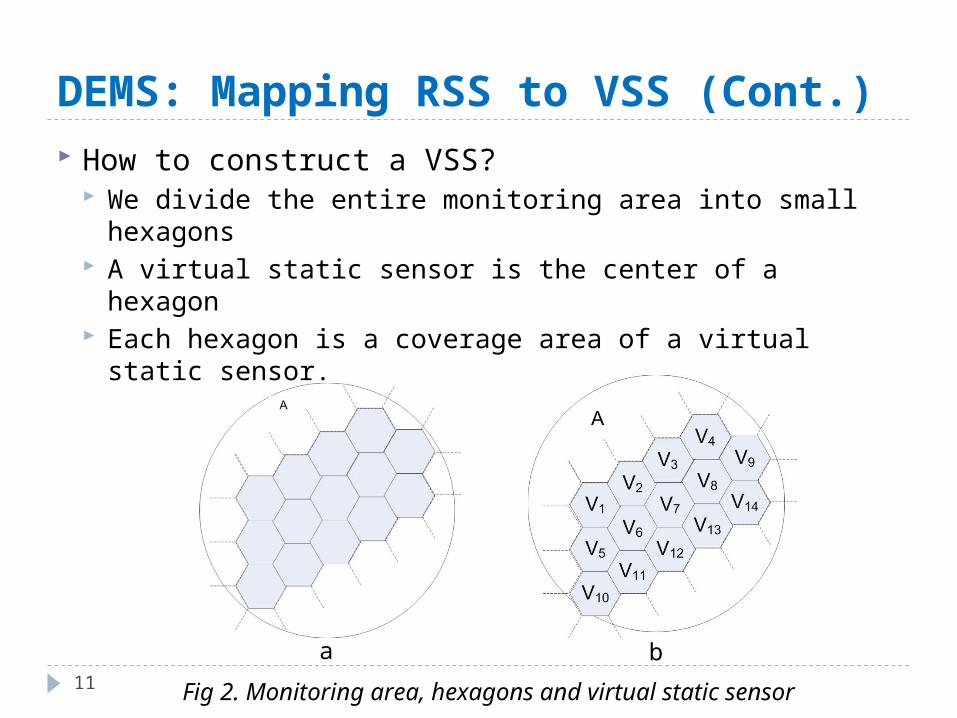
How to construct a VSS? We divide the entire monitoring area into small hexagons A virtual static sensor is the center of a hexagon Each hexagon is a coverage area of a virtual static sensor.
11 Fig 2. Monitoring area, hexagons and virtual static sensor
a b

DEMS: Mapping RMS to VSS
12
Goal: map RMSs’ readings to VSSs’ readings so that spatial and temporal relations among the sensor readings can be restored.
Two types of mapping: Mapping of a non-missing RMS to VSS Mapping of a missing RMS to VSS

Fig 3. RMSs and VSSs
DEMS: Mapping of a non-missing RMS to VSS If a VSS contains one RMS within its coverage area, the
RMS’s reading is used as the VSS reading If a VSS contains more than one RMSs, the average of the
RMSs’ readings is used as the VSS reading If a VSS contains no RMS, the VSS is called inactive.
13

DEMS: Mapping of a missing RMS to VSS Why mapping of a missing RMS is difficult?
RMS location is the key to RMS to VSS mapping If a RMS is missing, it is very likely that its data and location
would be missing together Hence mapping of a missing RMS to VSS requires intelligence
The solution A missing RMS is mapped to a VSS using a trajectory mining
approach for location prediction [Morzy, 2007].
14

DEMS: Mapping of a missing RMS to VSS (cont.) What is a trajectory?
A trajectory is the sequence of hexagons that a mobile sensor traverses
If a mobile sensor is not missing, it reports its location and the location is contained by one hexagon
Hence the sequence of hexagons is called a trajectory.
15 Fig 4. Trajectory of a RMS
(V14,V9,V11,V4,V3,V10) is the trajectory of M1

DEMS: Mapping of a missing RMS to VSS (cont.) Each RMS has a trajectory DEMS periodically stores the
trajectories (collected from all RMSs) into a frequency pattern tree
Frequency pattern tree It has a root labeled null Each node consists of an ID (hexagon ID)
and count (number of times it appears in the trajectories)
16
Example: 5 trajectories1. (V14, V9, V11, V4, V2, V8, V1)2. (V14, V9, V11, V4, V3, V10, V1)3. (V14, V9, V5, V4, V3, V10, V8)4. (V14, V9, V11, V4, V3, V10, V1, V8)5. (V2, V3, V6, V10, V8, V1) Fig 5. A frequency pattern tree
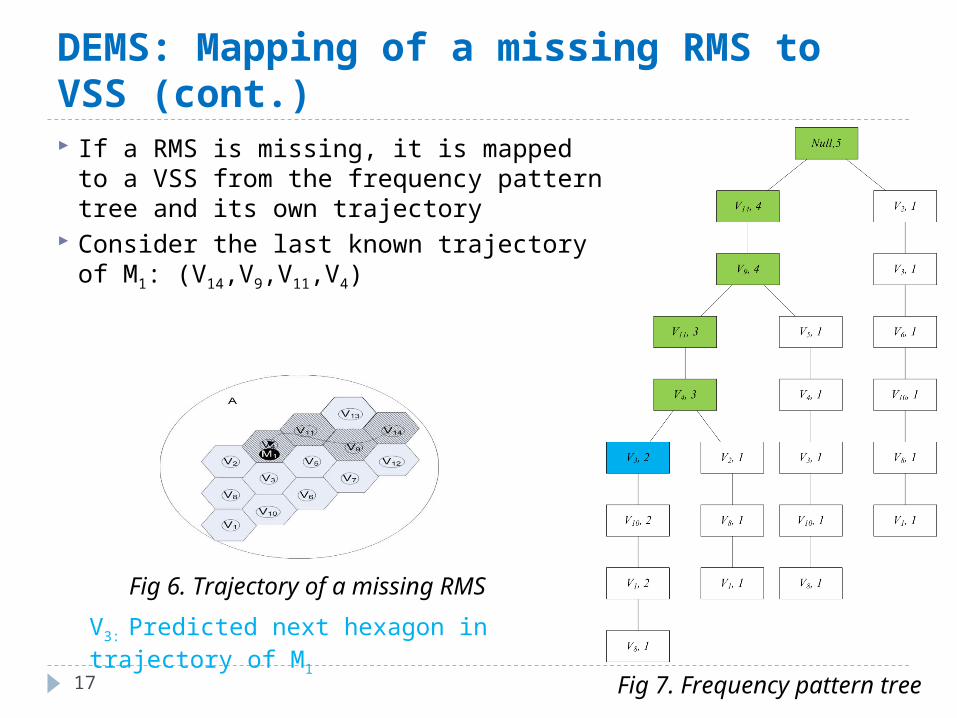
DEMS: Mapping of a missing RMS to VSS (cont.) If a RMS is missing, it is mapped to a VSS
from the frequency pattern tree and its own trajectory
Consider the last known trajectory of M1: (V14,V9,V11,V4)
17 Fig 7. Frequency pattern tree
Fig 6. Trajectory of a missing RMS
V3: Predicted next hexagon in trajectory of M1

DEMS: Mapping RMS to VSS (cont.)
18
Procedure mapReal2Virtual(RealSensorData listRSData, VirtualSensorData listVSData)
1 for each real sensor rs 2 if(rs is not missing)3 location ← listRSData(rs).Location4 vs ← findVirtualSensor(location)5 listVSData(vs).addReading(listRSData(rs).Reading)6 else7 location ← predictLocation(rs) 8 vs ← findVirtualSensor(location)9 listVSData(vs).status←missing
10 end loop11 for each virtual static sensor vs12 if(listVSData(vs) has data)13 listVSData(vs).status←active14 listVSData(vs).reading←average(listVSData(vs).Readings)15 else16 if(listVSData(vs).status is not missing)17 listVSData(vs).status ←inactive18 end loop
end procedure
Fig 8. Mapping algorithm

DEMS Components DEMS has three major components:
Real Mobile Sensor (RMS) to Virtual Static Sensor (VSS) Divides the entire area of coverage into small hexagons, Each hexagon is the coverage area of a virtual static sensor where the virtual
static sensor is assumed to be sitting in the middle of the hexagon, Converts RMS readings into VSS readings.
Association rule mining Constructs a novel data structure called MASTER-tree to capture the association
rules among VSSs Updates MASTER-trees to capture the most recent association rules among
VSSs. Data estimation
Uses the most recent association rules to estimate a missing VSS reading, Uses the missing VSS reading as missing RMS reading.
19

DEMS: Association Rule MiningGoal: mine and represent the potential
association rules among the VSS readings. We propose a novel data structure (called
MASTER-tree) to mine and represent the association rules among VSS readings
MASTER-tree basics: A MASTER-tree is capable of mining any kind
of association rules among any number of VSSs A MASTER-tree represents potential association
rules among the VSS readings A path in MASTER-tree represents a potential
association rule.
20
Fig 8. A MASTER-tree

DEMS: Association Rule Mining (cont.) The potential number of association rules among VSSs
grows exponentially with the number of VSSs To restrict the number of association rules, DEMS clusters
the VSSs into small groups and constructs one MASTER-tree for each group
DEMS uses Agglomerative clustering: Agglomerative clustering starts with every VSS as an
individual cluster At each step it merges two closest clusters based on their pair-
wise distances into one if the total number of VSSs in the new cluster does not exceed a user-defined maximum number of VSSs in one cluster.
21

DEMS: Association Rule Mining (cont.)
Fig 9. A MASTER-tree without the grid stricture
V2
Ø
V1 V3
V1 V3
V3 V1
V3 V2 V1 V2
V2
Details

DEMS: The MASTER-tree Projection Module (cont.)
23
Fig 10. MASTER-tree with grid structure
Ø
Summary StatsV2
Summary Stats
…Summary
StatsSummary
StatsV1
Summary Stats
…Summary
StatsSummary
StatsV3
Summary Stats
…Summary
Stats
Summary StatsV1
Summary Stats
…Summary
StatsSummary
StatsV3
Summary Stats
…Summary
Stats
Summary StatsV3
Summary Stats
…Summary
StatsSummary
StatsV1
Summary Stats
…Summary
Stats
Summary StatsV1
Summary Stats
…Summary
StatsSummary
StatsV3
Summary Stats
…Summary
Stats
Summary StatsV3
Summary Stats
…Summary
StatsSummary
StatsV1
Summary Stats
…Summary
Stats

V2[11, 20], V3[11, 20] → V1[1, 20]Support : 60%Confidence: 66%
DEMS: Association Rule Mining (cont.)
24
Fig 11. MASTER-tree with count
5
2V2 3 … 2V1 2 … 1 2V3 2 … 1
V1 2 … 1 V3 3 …
1V3 1 … 1V1 1 … 1
2V1… 2V3
…
V3 2 … 1V1 1 …
V2[1, 10], V1[1, 10] → V3[11, 20]Support : 40%Confidence: 100%
(2, 31, 485, 7657, 121937)

DEMS: Association Rule Mining (cont.)
25
Let The minimum support 50% The minimum confidence 50% A typical association rule becomes
V2[11, 20], V3[11, 20] → V1[1, 20]
The rule meaning: if the VSS reading of V2 is within 10 to 20 and the VSS reading for V3 is within 10 to 20, the VSS reading for V1 is most likely within 0 to 20.
There exists a path from the root node to V1[1, 20] via V2[11, 20] and V3[11, 20] in the Master-tree.

DEMS Components DEMS composed of three major components
Real Mobile Sensor (RMS) to Virtual Static Sensor (VSS) Divides the entire area of coverage into small hexagons, Each hexagon is the coverage area of a virtual static sensor where the virtual
static sensor is assumed to be sitting in the middle of the hexagon, Converts RMS readings into VSS readings.
Association rule mining Construct a novel data structure called MASTER-tree to capture the association
rules among VSSs, Update MASTER-trees to capture most recent association rules among VSSs.
Data estimation Uses the most recent association rules to estimate a missing VSS reading Uses the estimated value of the missing VSS reading as the estimated value of
the missing RMS reading.
26

DEMS: Data Estimation
Goal: estimate the missing VSS reading. The data estimation modules estimates the missing VSS The estimated reading for the missing VSS is used as the
estimated reading for the missing RMS.
27

DEMS: Data Estimation (cont.)
28
Fig 12. Flowchart of the data estimation module
(A step by step example)

Performance Evaluation
29
Simulation Model We simulate the missing data for our datasets A sensor is missing randomly (approximately 5-10%) for a consecutive
random number (10 - 20) of rounds Data and location both are missing for a missing sensor We use DEMS, TinyDB, SPIRIT and Average method to estimate
missing readings TinyDB
An average based technique which estimates the missing data by taking the average of the readings from other sensor readings in the current round.
SPIRIT An auto-regression based technique which estimates the missing data based on the
readings in the previous rounds Average
The average of other sensor readings is used as the estimated reading We compare the techniques based on mean absolute error (MAE)
MAE = Σ|estimation error|/number of estimations.

Performance Evaluation (cont.)
30
Datasets DAPPLE Project Dataset: A real life dataset
The carbon monoxide (CO) readings in the range [0, 6] were collected over a period of two weeks around Marylebone Road in London
The mobile sensors monitoring the atmospheric CO level are attached to PDAs which store these readings
We chose Thursday, 20th May 2004, when three sensors were simultaneously recording for about 32 minutes, resulting in 600 rounds (after disregarding the missing rounds) of CO readings
Factory Floor Temperature Dataset: A synthetic dataset A simulation of a mobile sensor network for monitoring factory floor temperatures Machines are placed on a floor Some machines are turned on for a number of rounds; the temperatures on these
machines reach a high constant temperature and heat disperse on the floor. 100 mobile sensors were roaming around in random directions to monitor the
factory floor and report the temperature readings in the range [0, 100C] from different locations.
The mobile sensor readings were sampled once per hour; the total rounds of readings are 5000 from 100 mobile sensors.

100 150 200 250 300 350 400 450 500 550 6000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Number of rounds
MA
E
Number o rounds vs. MAE
DEMS Average TinyDB SPIRIT
Performance Evaluation (cont.)
31
Fig 13. Impacts of number of rounds on MAE for DAPPLE project dataset
Approach Average MAE
DEMS 0
Average 1.2717
TinyDB 0.6331
SPIRIT 0.9437
Table 1. Average MAE for DAPPLE project dataset

500 1000 1500 2000 2500 3000 3500 4000 4500 50000
2
4
6
8
10
12
14
16
Number of rounds
MA
E
Number of rounds vs. MAE
DEMS Average TinyDB SPIRIT
Performance Evaluation (cont.)
32
Fig 14. Impacts of number of rounds on MAE for factory floor dataset
Approach Average MAE
DEMS 2.2538
Average 14.778
TinyDB 6.9621
SPIRIT 4.7472
Table 2. Average MAE for factory floor dataset

Conclusions and Future Work
33
We proposed DEMS: A novel data estimation technique for mobile sensor networks
based on data mining and virtual static sensor concepts Estimates missing sensor data with high accuracy
Future work: Extend DEMS to include Multiple base stations De-synchronized mobile sensor networks Cluster sensor networks.

Thanks
34
Questions?

MASTER-tree Construction
Ø
Fig . Merged tree for figure a and b
S2 S1 S3
S1 S3
S3
S3 S2 S1 S2
S2
Fig (a). A Pattern tree for S3
S2
Ø
S1 S3
S1 S3
S3
S3
Fig. (c) A Pattern tree for S1
S2
Ø
S3 S1
S3 S1
S1
S1
Fig (b). A Pattern tree for S1
S3
Ø
S1 S2
S1 S2
S2
S2
Ø
Fig . Merged tree for figure a, b and c
S2 S1 S3
S1 S3
S3 S1
S3 S2 S1 S2
S2
Back

MASTER-tree projection and data estimation:
An example
Simulation

Assume… Three Node (A, B, C) One dimension of Data (Temperature) Upper bound 30 lower bound 0, cell size = 10 dis(A,B) = 4, dis(A,C) = 3 and dis(B,C) = 5 MCSS = 10 minSup = 25% minConf = 75%
C
A B

Pattern trees
Ø
A B C
B C C
C
Ø
A C B
C B B
B
Ø
C B A
B A A
A
Ø
A B
B C
C B
A C
C
B A
AC
A BFinal MASTER tree without GS
Pattern tree for C Pattern tree for B Pattern tree for A

Data Sequence
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?

A B C
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?

A B C
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
A

A B C
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
A

A B C
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
AC B
A C B
A
A

A B C
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
AC B
A C B
A
AC A

A B C
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
AC B
A C B
A
AC A

A B 2 2 1
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
AC B
A C B
A
AC A
MCSS = 10
Rule: Ø →C = [0, 29]Supp = 100%Conf = 100%

A B 2 2 1
B C
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
AC B
A C B
A
AC A
MCSS = 10
Rule: Ø →C = [0, 19]Supp = 80%Conf = 80%

2 3 B 2 2 1
B 2
A
A
A
BC
BC
Ø
A 4 14 11 18 6 8
B 8 18 15 22 10 12
C 7 17 14 21 9 ?
B C
C B
A C B
A
AC B
A C B
A
AC A
MCSS = 10
Rule: Ø →C = [0, 29]Supp = 80%Conf = 80%
Rule: A →C = [0, 9]Supp = 40%Conf = 100%
Back to presentation