data association in multistatic passive radar systems
TRANSCRIPT

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD
Data Association in Multistatic Passive Radar Systems
Martina Broetje and Wolfgang Koch
Department SDF, Fraunhofer FKIE, Wachtberg, Germany

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 2
@ Fraunhofer FKIE
Passive Radar Application: Air Surveillanceusing transmitter of opportunity, e.g. tv, radio, mobile phone stations
Possibly long rangeandhigh altitude
Passive radar systems are developed e.g. by Hensoldt andFraunhofer FHR

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 3
@ Fraunhofer FKIE
Passive Radar Application: Maritime Surveillance
© OpenstreetMap (and) contributors,CC-BY_SA
Fraunhofer FKIE develops a demonstrator forGSM passive radar
using transmitter of opportunity, e.g. tv, radio, mobile phone stations
Range is limited by the radar horizon

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 4
@ Fraunhofer FKIE
Data Management and Distribution
Detection System
Data fusion and advanced tracking
CC by sanfamedia
Passive Radar Application: Security
WiFi emitter
Passive Radar systeme.g. developed by
University of Rome (La Sapienza)
Track initialization

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 5
@ Fraunhofer FKIE
Advantages of multistatic systems – Improved detection (different bistatic angles, redundancy)– Improved target localisation
– Passive systems: no need for own transmitters (no frequency permission, low power consumption, covert operation)
Target tracking in multistatic systems
– Target localization in Cartesian coordinates– Important for sensors of low accuracy
Particular challenges:
– Robust target tracking algorithms for large numbers of false alarms – Target tracking algorithms for passive radar using digital broadcasting
signals
Motivation

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 6
@ Fraunhofer FKIE
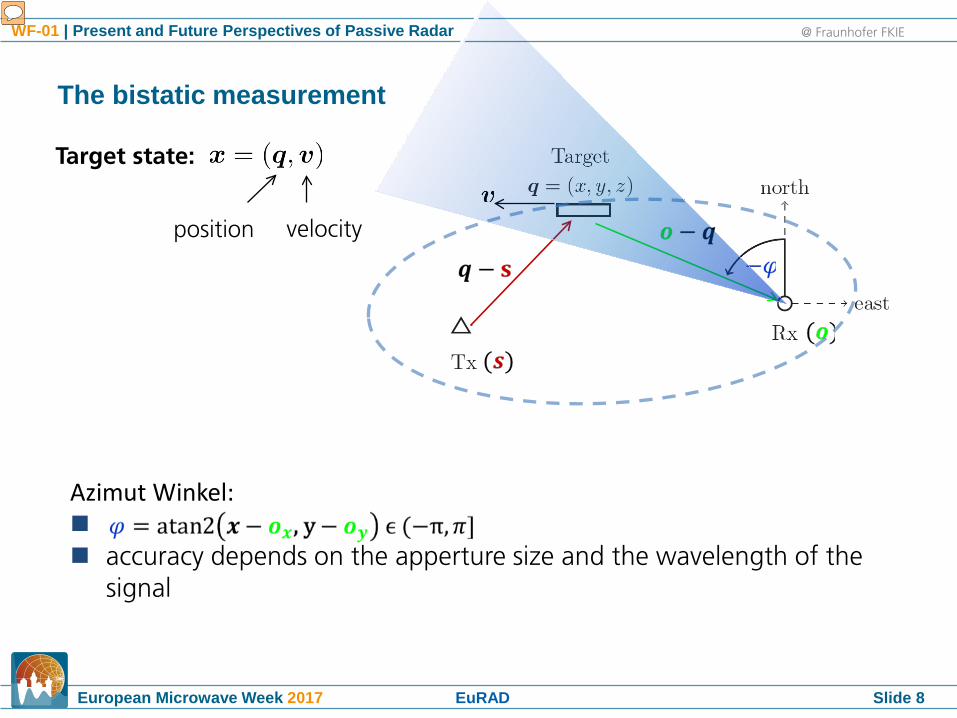
The bistatic measurement
Target state:
position velocity
Bistatic range: TDoA 𝜏𝜏 between direct signal and echo signal Bistatic Range: 𝑟𝑟 = 𝜏𝜏 � 𝑐𝑐 + 𝑠𝑠 − 𝑜𝑜 or
𝑟𝑟 = 𝑞𝑞 − 𝑜𝑜 + 𝑞𝑞 − 𝑠𝑠 describes ellipse in 2D and ellipsoid in 3D accuracy depends on the band width of the signal

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 7
@ Fraunhofer FKIE
The bistatic measurement
Target state:
position velocity
Bistatic range-rate: measured Doppler shift in Hz 𝑓𝑓𝑑𝑑 velocity component of bistatic range
accuracy depends on the wave length of the signal and the integrationtime
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 8
@ Fraunhofer FKIE
The bistatic measurement
Target state:
position velocity
Azimut Winkel: accuracy depends on the apperture size and the wavelength of the
signal

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 9
@ Fraunhofer FKIE
FM (analogue radio):– high power– Low bandwidth poor range resolution
DAB / DVB-T (digital radio and television):– High bandwidth good range resolution– Single frequency characteristics
GSM (mobile phone):– Many base stations available– Low power– Low bandwidth poor range resolution
WIFI (WLAN): – Very high bandwidth very good range resolution– Very low power only for near field operation
Characteristics of different passive radar broadcasters
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 10
@ Fraunhofer FKIE
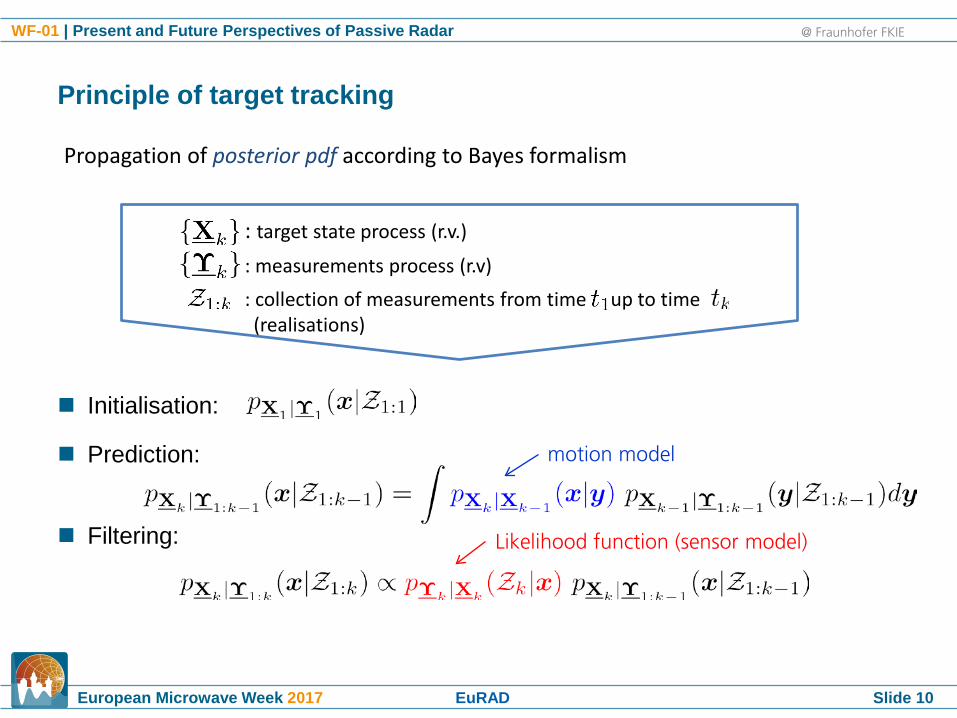
Initialisation:
Prediction:
Filtering:
Principle of target tracking
Propagation of posterior pdf according to Bayes formalism
motion model
Likelihood function (sensor model)
: target state process (r.v.)
: measurements process (r.v): collection of measurements from time up to time (realisations)

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 11
@ Fraunhofer FKIE
The Multisensor Likelihood Function
𝑝𝑝 𝑍𝑍𝑘𝑘 𝑥𝑥𝑘𝑘 = �𝑖𝑖=1
𝑛𝑛𝑡𝑡
�𝑝𝑝(𝑍𝑍𝑘𝑘𝑖𝑖 |𝑥𝑥𝑘𝑘
𝑛𝑛𝑡𝑡: number of transmitters 𝑛𝑛𝑡𝑡
not valid for SVN !
assuming perfect association:
A linear propagation- and measurement model leads to the well known Kalman Filter propagation formula
𝑝𝑝 𝑍𝑍𝑘𝑘 𝑥𝑥𝑘𝑘 = �𝑖𝑖=1
𝑛𝑛𝑡𝑡
�𝑝𝑝(𝑧𝑧𝑘𝑘𝑖𝑖 |𝑥𝑥𝑘𝑘
≈ �𝑖𝑖=1
𝑛𝑛𝑡𝑡
𝑁𝑁(𝑧𝑧𝑘𝑘𝑖𝑖 ;ℎ 𝑥𝑥𝑘𝑘 ,𝑅𝑅) assuming GaussianMeasurement Model

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 12
@ Fraunhofer FKIE
Measurement uncertainty in Cartesian coordinates
Uncertainty in Cartesian depends on:
Bistatic geometry Range and angle accuracy
(here Gaussian) non-Gaussian shape due to
non-linearity of measurement equationReceiver (Rx)
Transmitter (Tx)
Single transmitter, one instant of time
x [km]
y [k
m]

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 13
@ Fraunhofer FKIE
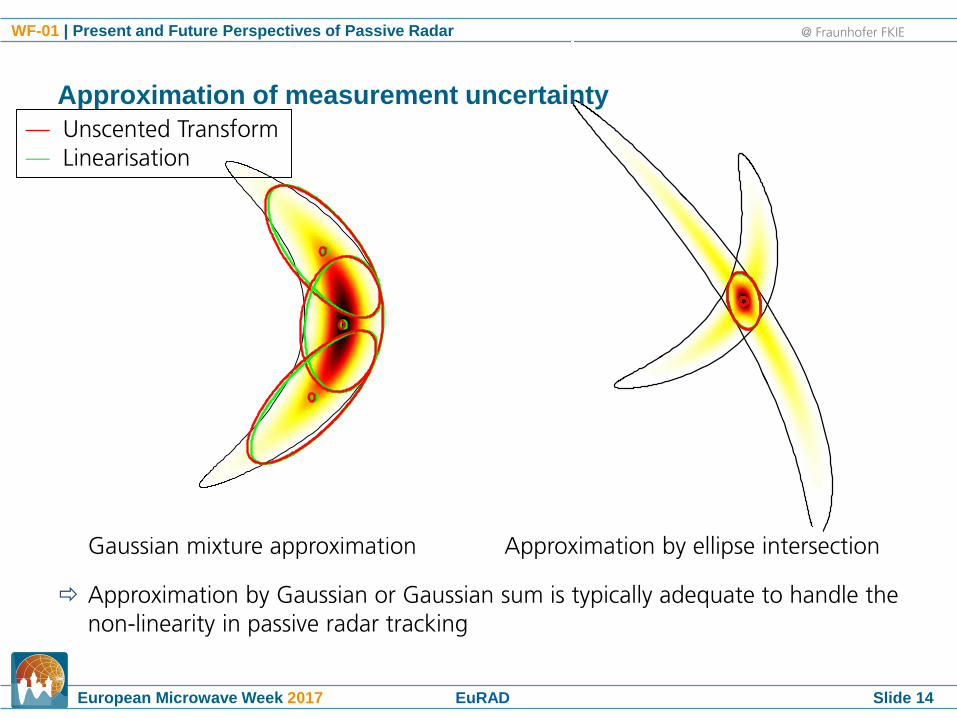
Approximation of measurement uncertainty
Good range, poor azimuth Poor range and azimuth
— Unscented Transform— Linearisation
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 14
@ Fraunhofer FKIE
Approximation of measurement uncertainty
Gaussian mixture approximation Approximation by ellipse intersection
Approximation by Gaussian or Gaussian sum is typically adequate to handle the non-linearity in passive radar tracking
— Unscented Transform— Linearisation

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 15
@ Fraunhofer FKIE
The Multi-Sensor Likelihood function
Association between measurements and target is ambiguous:
false alarms missed detections
(dependent on PD)
Likelihood function of 2 Tx/Rx pairs:
x / m
y / m
5700 5800 5900 6000 6100 6200
-1000
-500
0
500
1000 false alarm
target
measurements of different Tx/Rx pairs are independent
2 Tx, 1 Rxone target
Describes also data ambiguity
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 16
@ Fraunhofer FKIE
x / m
y / m
5700 5800 5900 6000 6100 6200
-1000
-500
0
500
1000
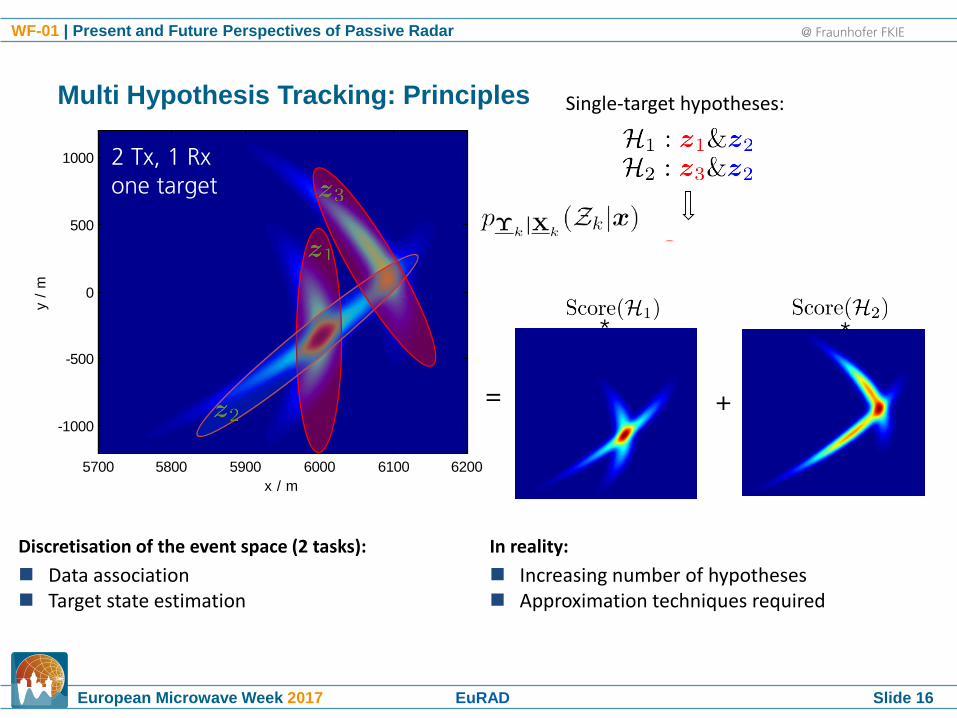
Multi Hypothesis Tracking: Principles
Discretisation of the event space (2 tasks): Data association Target state estimation
Single-target hypotheses:
+
* *
=
2 Tx, 1 Rxone target
In reality: Increasing number of hypotheses Approximation techniques required

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 17
@ Fraunhofer FKIE
Multi Hypothesis Tracking: Multiple targets
Single-target assumption fails in case of closely spaced targets
Multi-target likelihood: calculation by multi-target hypotheses
Likelihood surface in case of two targets

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 18
@ Fraunhofer FKIE
5700 5800 5900 6000 6100 6200
-1000
-500
0
500
1000
x-range
y-ra
nge
Multi-target hypotheses
single-target hypotheses:
multi-target hypotheses:
measurements
Multi-target Likelihood:

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 19
@ Fraunhofer FKIE
4000 4500 5000 5500 6000 6500 7000 7500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
x-range
y-ra
nge
Association problem for single frequency networks(DAB/ DVB-T)
Example: 2 targets, 2 Tx, 1 Rx
targets
ghosts
Unknown association between measurements and illuminators
single-target hypotheses:
multi-target hypotheses:
multi-target conflicts: not only for close targets

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 20
@ Fraunhofer FKIE
Task of Target Tracking
For known association the multi-sensor likelihood function describes the sensor specific estimation task
The second task of target tracking is to solve the data ambiguity by associating measurements with targets (association task) − for SFN additionally associating measurements with transmitters
The degree of difficulty in target tracking is dependent on:− the measurement error and the Cartesian shape of the bistatic
measurement− the number of false alarms− the number of targets (and the closeness of targets in measurement
coordinates)
Choice of appropriate fusion architecture for different passive radar systems

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 21
@ Fraunhofer FKIE
Processing measurements
of sensor 1
Processing measurements
of sensor 2
Fused results
+
=
Multi-sensor fusion techniques: Distributed tracking
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 22
@ Fraunhofer FKIE
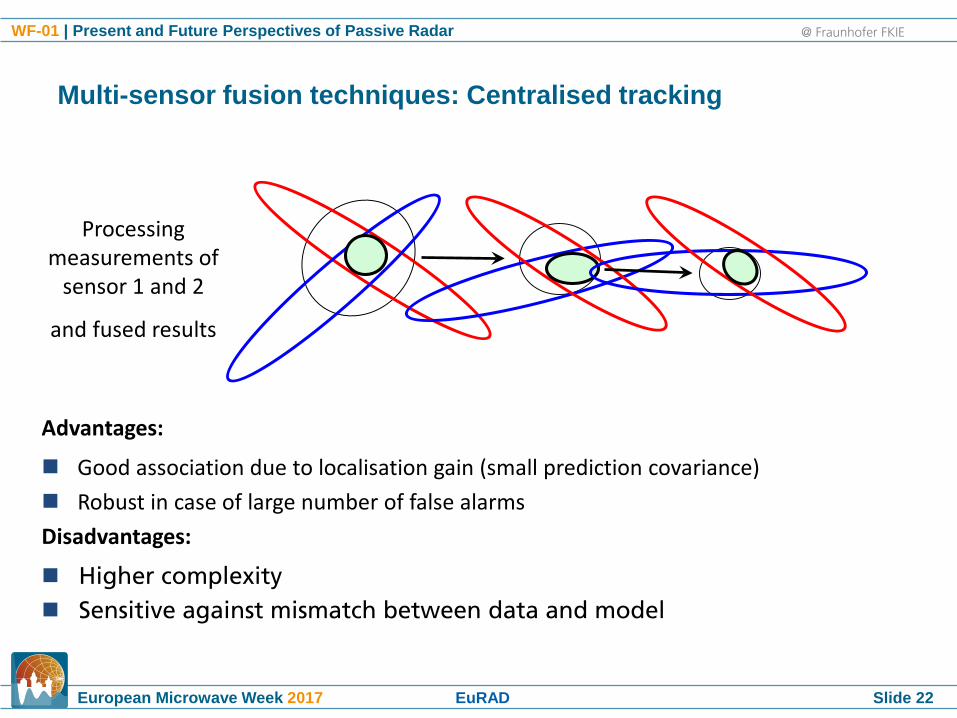
Processing measurements of
sensor 1 and 2
and fused results
Advantages:
Good association due to localisation gain (small prediction covariance) Robust in case of large number of false alarms Disadvantages:
Higher complexity Sensitive against mismatch between data and model
Multi-sensor fusion techniques: Centralised tracking

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 23
@ Fraunhofer FKIE
Distributed Tracking in Passive Radar
Separate tracking for each Tx/Rx pair in measurement coordinates R/D Tracking avoid loose due to approximation in Cartesian coordinates identify Tx/Rx combinations which contribute to target detection
Cartesian localisation by correlation of R/D tracks from different Tx/Rx pairs

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 24
@ Fraunhofer FKIE
Centralized Tracking in Passive Radar (1-Stage MHT)
………….Tx/Rx pair 1 Tx/Rx pair n
central tracking stage
Measurements

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 25
@ Fraunhofer FKIE
Distributed Tracking in Passive Radar (2-Stage MHT)
………….Tx/Rx pair 1 Tx/Rx pair n
Correlation stage:Generation / Update of correlation hypothesis
R/D tracking R/D tracking
Evaluation of global / multi-target hypothesis
pruning / confirmation
Measurements

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 26
@ Fraunhofer FKIE
Combinded Distributed and Centralized Tracking (3-Stage MHT)
………….Tx/Rx pair 1 Tx/Rx pair n
Correlation stage:Generation / Update of correlation hypothesis
R/D tracking R/D tracking
Evaluation of global / multi-target hypothesis
pruning / confirmation
centraltracking stage
Measurements
Track extraction
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 27
@ Fraunhofer FKIE
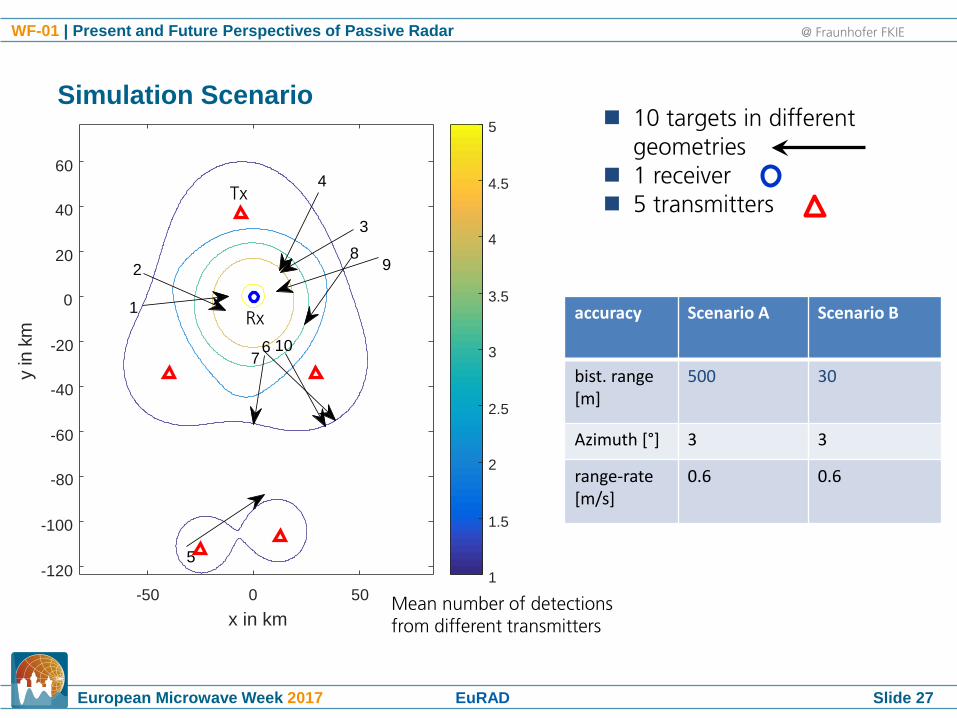
10 targets in different geometries
1 receiver 5 transmitters
Simulation Scenario
accuracy Scenario A Scenario B
bist. range[m]
500 30
Azimuth [°] 3 3
range-rate [m/s]
0.6 0.6
Rx
Tx
Mean number of detectionsfrom different transmitters
1
2
3
4
5
67
89
10
-50 0 50x in km
-120
-100
-80
-60
-40
-20
0
20
40
60
yin
km
1
1.5
2
2.5
3
3.5
4
4.5
5
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 28
@ Fraunhofer FKIE
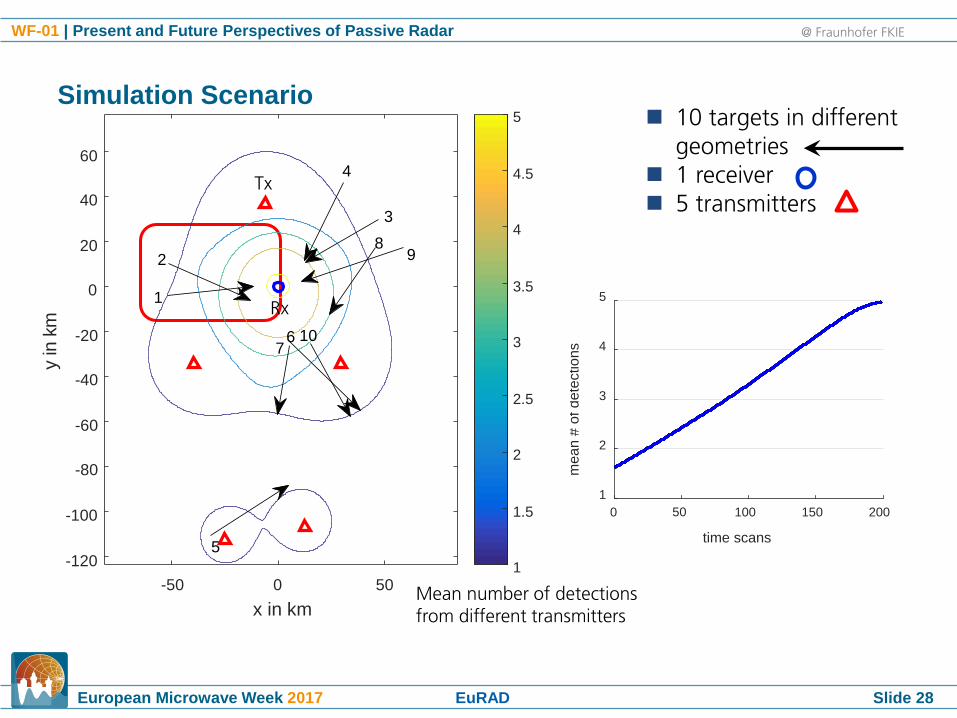
10 targets in different geometries
1 receiver 5 transmitters
Simulation Scenario
0 50 100 150 200
time scans
1
2
3
4
5
mea
n #
of d
etec
tions
Rx
Tx
Mean number of detectionsfrom different transmitters
1
2
3
4
5
67
89
10
-50 0 50x in km
-120
-100
-80
-60
-40
-20
0
20
40
60
yin
km
1
1.5
2
2.5
3
3.5
4
4.5
5

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 29
@ Fraunhofer FKIE
Evaluation of Scenario 1 via Monte Carlo Runs
0 50 100 150 200
time scans
50
100
300
500
1000
RM
SE
(Pos
ition
) in
m
0 50 100 150 200
time scans
10
50
100
300
500
1000
RM
SE
(Pos
ition
) in
m
— 3-stage MHT
— 2-stage MHT
— 1-stage MHT
— CRB
23
12 13
22
1316
0
10
20
30
1-stage MHT 2-stage MHT 3-stage MHT
Scenario A Scenario BTime neededtoextract90% ofthetargets 0 50 100 150 200
time scans
1
2
3
4
5
mea
n #
of d
etec
tions
1-stage MHT: - good estimation performance in scenario A- long track extraction time

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 30
@ Fraunhofer FKIE
10 targets in different geometries
1 receiver 5 transmitters
Simulation Scenario
0 100 200
time scans
1
2
3
4
5
mea
n #
of d
etec
tions
Rx
Tx
Mean number of detectionsfrom different transmitters
1
2
3
4
5
67
89
10
-50 0 50x in km
-120
-100
-80
-60
-40
-20
0
20
40
60
yin
km
1
1.5
2
2.5
3
3.5
4
4.5
5

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 31
@ Fraunhofer FKIE
Evaluation of Scenario 1 via Monte Carlo Runs
0 50 100 150 200
time scans
10
50
100
300
500
1000
RM
SE
(Pos
ition
) in
m
0 50 100 150 200
time scans
50
100
300
500
1000
RM
SE
(Pos
ition
) in
m
— 3-stage MHT
— 2-stage MHT
— 1-stage MHT
— CRB
2723 23
33
21 21
0
10
20
30
40
1-stage MHT 2-stage MHT 3-stage MHT
Scenario A Scenario BTime neededtoextract90% ofthetargets 0 100 200
time scans
1
2
3
4
5
mea
n #
of d
etec
tions
1-stage MHT: - good estimation performance in scenario A- long track extraction time

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 32
@ Fraunhofer FKIE
10 targets in different geometries
1 receiver 5 transmitters
Simulation Scenario
0 100 200
time scans
2
2.5
3
3.5
4
4.5
mea
n #
of d
etec
tions
Rx
Tx
Mean number of detectionsfrom different transmitters
1
2
3
4
5
67
89
10
-50 0 50x in km
-120
-100
-80
-60
-40
-20
0
20
40
60
yin
km
1
1.5
2
2.5
3
3.5
4
4.5
5

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 33
@ Fraunhofer FKIE
0 100 200
time scans
2
2.5
3
3.5
4
4.5
mea
n #
of d
etec
tions
0 50 100 150 200
time scans
10
50
100
300
500
1000
RM
SE
(Pos
ition
) in
m
Evaluation of Scenario 1 via Monte Carlo Runs— 3-stage MHT
— 2-stage MHT
— 1-stage MHT
— CRB
0 50 100 150 200
time scans
50
100
300
500
1000
RM
SE
(Pos
ition
) in
m
9
7 7
3
76
0
5
10
1-stage MHT 2-stage MHT 3-stage MHT
Scenario A Scenario B
3-stage MHT is a compromise of centralized and distributed tracking
WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 34
@ Fraunhofer FKIE
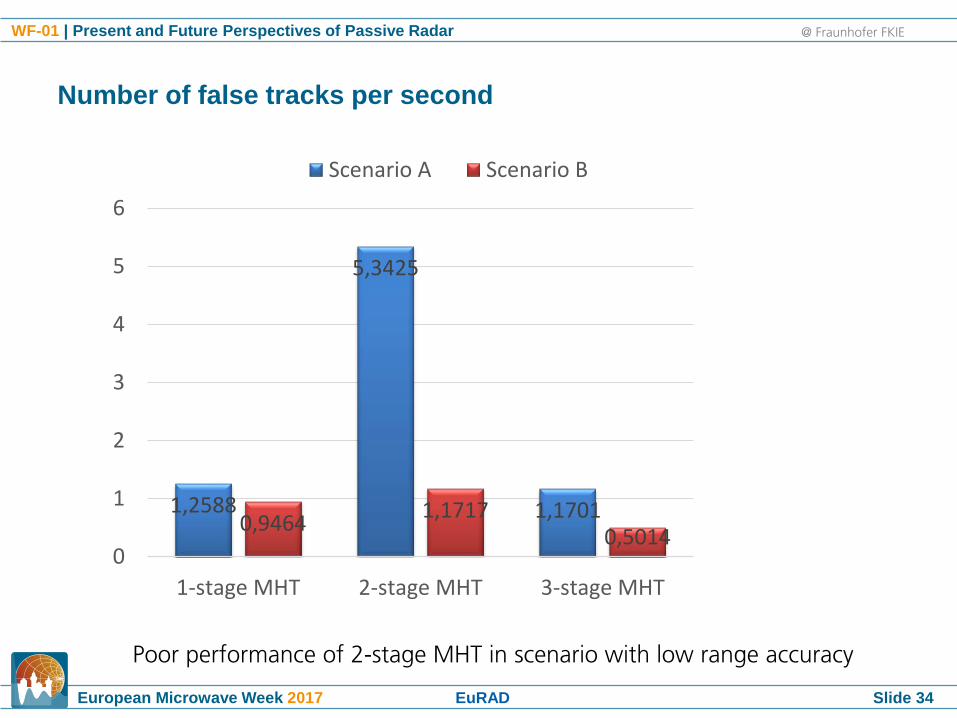
Number of false tracks per second
1,2588
5,3425
1,17010,9464 1,17170,5014
0
1
2
3
4
5
6
1-stage MHT 2-stage MHT 3-stage MHT
Scenario A Scenario B
Poor performance of 2-stage MHT in scenario with low range accuracy

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 35
@ Fraunhofer FKIE
Runtime Comparison (Runtime per Second)
1,5
1,32
0,83
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1-stage MHT 2-stage MHT 3-stage MHT

WF-01 | Present and Future Perspectives of Passive Radar
European Microwave Week 2017 EuRAD Slide 36
@ Fraunhofer FKIE
Conclusions
The fusion of measurements from multiple bistatic sensor pairs is a key feature of passive radar (increased coverage, improved estimation accuracy)
Task: realize this fusion gain by correctly associating measurements of the different bistatic sensor pairs and by appropriate estimation techniques.
The dimension of the association problem in passive radar applications depends strongly on the precision of the bistatic measurements. Multi-target conflicts can arise, even if the targets are geographically well-separated. The association problem further increases when transmitters are arranged in single-frequency networks.
The design of the tracking algorithms needs to be adapted to the specific characteristics of the passive radar system and the application scenario.