cs649 sensor networks - hinrg home · why wireless sensor networks ? ... can we define an...
TRANSCRIPT

Spring 2006 CS 649 1
CS649 Sensor NetworksLecture 1: Introduction
Andreas Terzis & I-Jeng Wanghttp://hinrg.cs.jhu.edu/wsn06/With input from Deborah Estrin, David Culler
Administrivia
Spring 2006 CS 649 2
• Monday, Tuesday, Wednesday 1:00-1:50 Shaffer 202• Office Hours: By appointment 417 Wyman Park• Class mailing list
• Information on how to join are on the class webpage• Pre-requisites:
• CS349 (Internet Protocols) or other networking course, Operating Systems, programming
• PhD attitude (self-directed, deal with open ended problems/assignments, highly motivated, critical, dedicated)

What’s new
Spring 2006 CS 649 3
• Information Processing • New class of techniques to process and combine
measurements collected by different sensors as well as to reason about sensor networks in general.
• Topics• Calibration• Estimation• Sensor Coordination
• Instructor • I-Jeng Wang• Research Assistant Professor @CS & Principal Professional
Staff @APL• Monday Lectures• http://www.cs.jhu.edu/~ijwang/

Course Mechanics
Spring 2006 CS 649 4
• Class attendance and participation mandatory• Grading
• 10 % Class Participation• 10 %: Paper reviews• 30% Midterm: Covering material from readings and
lectures• 50% Project: Each student will contribute to a
project involving experimental design, implementation and a writeup. Projects WILL be done in small groups (2-3 people).

Paper Reviews, Project, Exam schedule
Spring 2006 CS 649 5
• Paper Reviews• Each week need to read 2-3 papers and write one
page summary for each• Problem, Solution, Strong points, weak points• Sent to me by email before class• For tomorrow: [MPSC02]
• Midterm• Wed 3/13 In class
• Project• 2/15: Project Description• 3/1: First checkpoint• 3/29: Second checkpoint• Week of 5/1: In class presentations

Tentative Schedule
Spring 2006 CS 649 6
Systems Schedule• Week 1: Introduction• Week 2: Platforms, OS• Week 3: Wireless Medium
Characterization• Week 4: Topology Control• Week 5: MAC Protocols• Week 6: Routing Protocols I• Week 7: Routing Protocols II• Week 8: Spring Break• Week 9: Transport Protocols• Week 10: Querying and
Programming Abstractions• Week 11: Simulation• Week 12: Storage/Applications• Week 13: Security• Week 14: Project Presentations
Information Processing Schedule• Week 1: Introduction• Week 2: Probability & Stats• Week 3: Collaborative Signal and
Information Processing• Week 4: Target Localization• Week 5: Distributed Tracking I• Week 6: Distributed Tracking II• Week 7: Spring Break• Week 8: Self-Localization I• Week 9: Self-Localization II• Week 10: Synchronization• Week 11: Sensor Data Processing• Week 12: Sensor Control• Week 13: Project Presentations
Why Wireless Sensor Networks ?
Spring 2006 CS 649 7
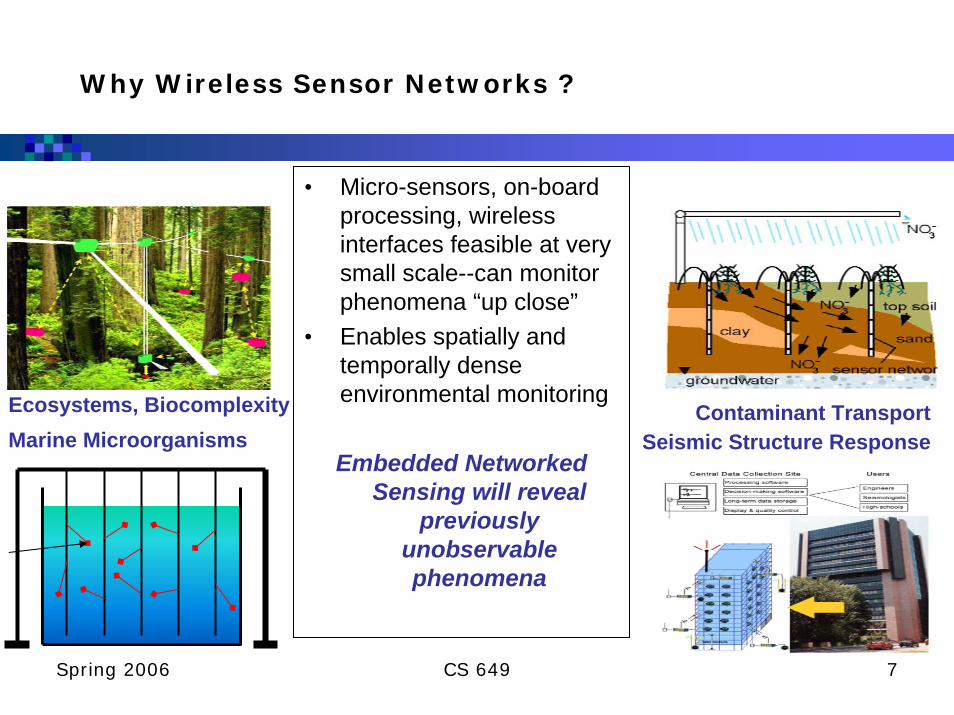
• Micro-sensors, on-board processing, wireless interfaces feasible at very small scale--can monitor phenomena “up close”
• Enables spatially and temporally dense environmental monitoring
Embedded Networked Sensing will reveal
previously unobservable phenomena
Ecosystems, BiocomplexityMarine Microorganisms
Contaminant TransportSeismic Structure Response
WSNs enabled by Networked Sensor Node Developments
Spring 2006 CS 649 8
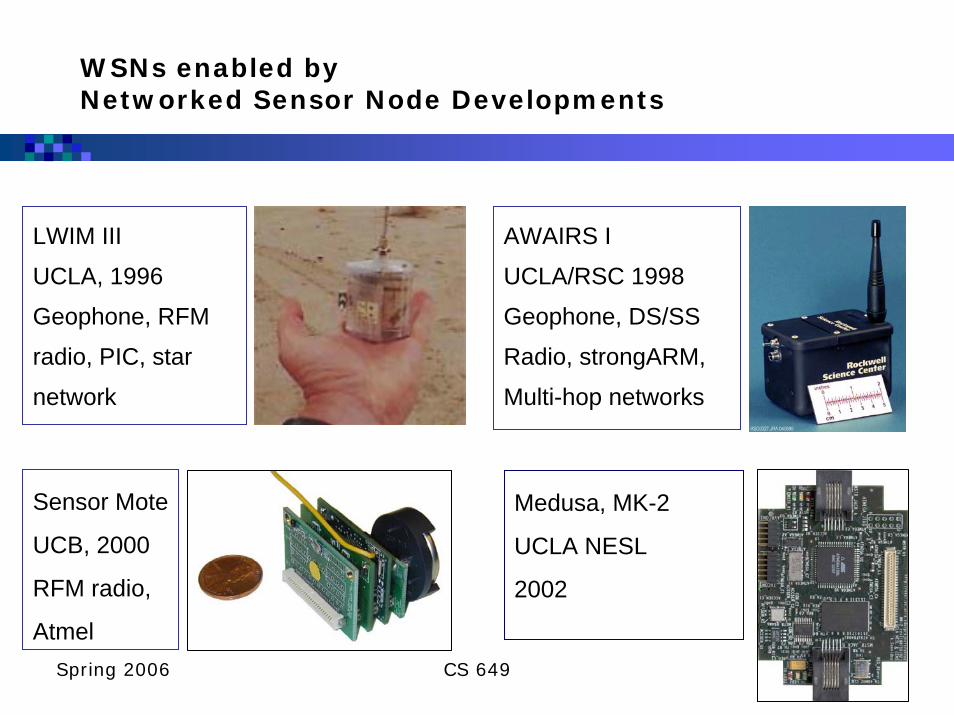
LWIM III
UCLA, 1996
Geophone, RFM
radio, PIC, star
network
AWAIRS I
UCLA/RSC 1998
Geophone, DS/SS
Radio, strongARM,
Multi-hop networks
Sensor Mote
UCB, 2000
RFM radio,
Atmel
Medusa, MK-2
UCLA NESL
2002

Current Generation Motes: Telos
Spring 2006 CS 649 9
• Single board philosophy• Robustness, Ease of use, Lower Cost• Integrated Humidity, Temperature & Light sensors
• First platform to use 802.15.4 (Zigbee)• CC2420 radio, 2.4 GHz, 250 kbps (12x mica2)• 3x RX power consumption of CC1000, 1/3 turn on time• Same TX power as CC1000
• TI MSP430 processor• Lower power consumption, 1.8V operation,
faster wakeup time• 40 MHz CPU clock, 10K RAM, 48K ROM
• Package• Integrated onboard antenna +3dBi gain• Everything USB & Ethernet based• 2/3 A or 2 AA batteries• Weatherproof packaging

Sensor Node Energy Roadmap
Spring 2006 CS 649 10
10,00010,000
1,0001,000
100100
1010
11
.1.1
Ave
rage
Pow
er (m
W)
• Deployed (5W)• PAC/C Baseline (.5W)
• (50 mW)
(1mW)
Rehosting to Low Rehosting to Low Power COTSPower COTS(10x)(10x)
--SystemSystem--OnOn--ChipChip--Adv Power Adv Power ManagementManagementAlgorithms (50x)Algorithms (50x)
20002000 20022002 20042004

Comparison of Energy Sources
Spring 2006 CS 649 11
Power (Energy) Density Source of Estimates
Batteries (Zinc-Air) 1050 -1560 mWh/cm3 (1.4 V) Published data from manufacturersBatteries(Lithium ion) 300 mWh/cm3 (3 - 4 V) Published data from manufacturers
Solar (Outdoors)15 mW/cm2 - direct sun
0.15mW/cm2 - cloudy day. Published data and testing.
Solar (Indoor).006 mW/cm2 - my desk
0.57 mW/cm2 - 12 in. under a 60W bulb TestingVibrations 0.001 - 0.1 mW/cm3 Simulations and Testing
Acoustic Noise3E-6 mW/cm2 at 75 Db sound level
9.6E-4 mW/cm2 at 100 Db sound level Direct Calculations from Acoustic TheoryPassive Human
Powered 1.8 mW (Shoe inserts >> 1 cm2) Published Study.
Thermal Conversion 0.0018 mW - 10 deg. C gradient Published Study.
Nuclear Reaction80 mW/cm3
1E6 mWh/cm3 Published Data.
Fuel Cells300 - 500 mW/cm3
~4000 mWh/cm3 Published Data.
With aggressive energy management, With aggressive energy management, wNSwNS mightmight
live off the environmentlive off the environment.
Source: UC Berkeley
.

Communication/Computation Technology Projection
Spring 2006 CS 649 12
1999 (Bluetooth
Technology)2004
(150nJ/bit) (5nJ/bit)1.5mW* 50uW
~ 190 MOPS(5pJ/OP)
Computation
Communication
Source: ISI & DARPA PAC/C Program
Assume: 10kbit/sec. Radio, 10 m range.Assume: 10kbit/sec. Radio, 10 m range.
Large cost of communications relative to computation Large cost of communications relative to computation continuescontinues
Sensors
Spring 2006 CS 649 13
• Passive elements: seismic, acoustic, infrared, strain, salinity, humidity, temperature, etc.
• Passive Arrays: imagers (visible, IR), biochemical• Active sensors: radar, sonar
• High energy, in contrast to passive elements• Technology trend: use of IC technology for increased
robustness, lower cost, smaller size• COTS adequate in many of these domains; work
remains to be done in biochemical

WSNs: Technology Design Themes
Spring 2006 CS 649 14
• Long-lived systems that can be un-tethered (wireless) and unattended
• Communication will be the persistent primary consumer of scarce energy resources (MICA Mote: 720nJ/bit xmit, 4nJ/op)
• Autonomy requires robust, adaptive, self-configuring systems
• Leverage data processing inside the network• Exploit computation near data to reduce communication,
achieve scalability• Collaborative signal processing• Achieve desired global behavior with localized algorithms
(distributed control)• “The network is the sensor” (Manges&Smith, Oakridge Natl
Labs, 10/98)• Requires robust distributed systems of hundreds of
physically-embedded, unattended, and often untethered, devices.

WSN Architecture Drivers
Spring 2006 CS 649 15
DRIVERS TECHNICAL CAPABILITIES
Varied and variableenvironmentsVaried and variableenvironments
Adaptive Self-ConfiguringWireless SystemsAdaptive Self-ConfiguringWireless Systems
Energy and scalabilityEnergy and scalability
Heterogeneity of devicesHeterogeneity of devices
Smaller component size and costSmaller component size and cost
EmbeddableMicrosensorsEmbeddableMicrosensors
Networked Info-MechanicalSystemsNetworked Info-MechanicalSystems
Distributed Signal andInformation ProcessingDistributed Signal andInformation Processing

Wireless Sensor NetworksArchitectural Considerations: outline
Spring 2006 CS 649 16
• Layers• Metrics• Taxonomy, Inputs• High level research questions• Course organization rationale
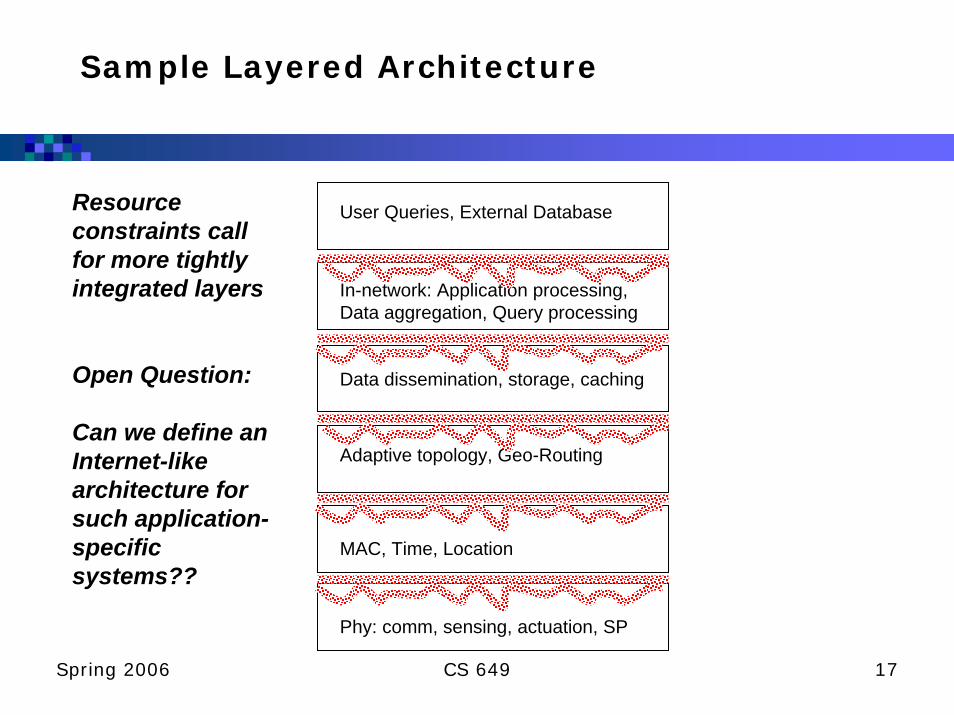
Sample Layered Architecture
Spring 2006 CS 649 17
In-network: Application processing, Data aggregation, Query processing
Adaptive topology, Geo-Routing
MAC, Time, Location
Phy: comm, sensing, actuation, SP
User Queries, External Database
Data dissemination, storage, caching
Resource constraints call for more tightly integrated layers
Open Question:
Can we define anInternet-like architecture for such application-specific systems??

Systems Taxonomy: Dimensions
Spring 2006 CS 649 18
• Spatial and Temporal Scale• Sampling interval• Extent• Density (of sensors relative to stimulus)
• Variability• Ad hoc vs. engineered system structure• System task variability• Mobility (variability in space)
• Autonomy• Multiple sensor modalities• Computational model complexity
• Resource constrained• Energy, BW• Storage, Computation

Metrics
Spring 2006 CS 649 19
• Efficiency• System lifetime/System resources
• Resolution/Fidelity• Detection/Identification
• Latency• Response time
• Robustness• To variable system and input state• Security to malicious or buggy nodes
• Scalability• Over space and time

Traffic/Load/Event Models: Dimensions
Spring 2006 CS 649 20
• Frequency (spatial, temporal)• Commonality of events in time and space
• Locality (spatial, temporal)• Dispersed vs. clustered/patterned
• Mobility• Rate and pattern
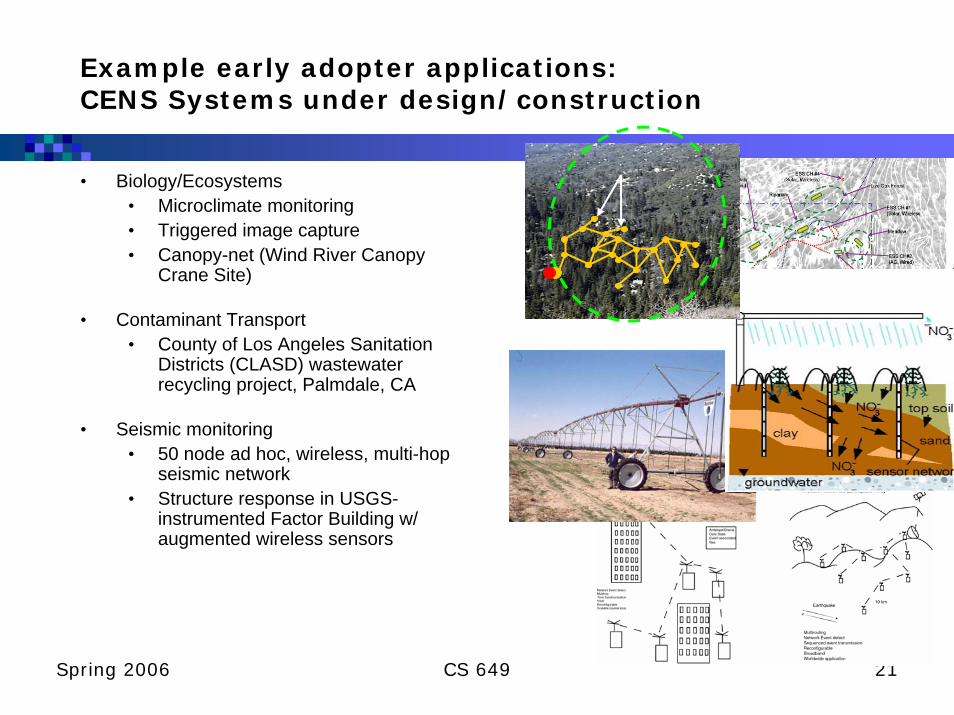
Example early adopter applications: CENS Systems under design/construction
Spring 2006 CS 649 21
• Biology/Ecosystems• Microclimate monitoring• Triggered image capture• Canopy-net (Wind River Canopy
Crane Site)
• Contaminant Transport• County of Los Angeles Sanitation
Districts (CLASD) wastewater recycling project, Palmdale, CA
• Seismic monitoring• 50 node ad hoc, wireless, multi-hop
seismic network• Structure response in USGS-
instrumented Factor Building w/ augmented wireless sensors
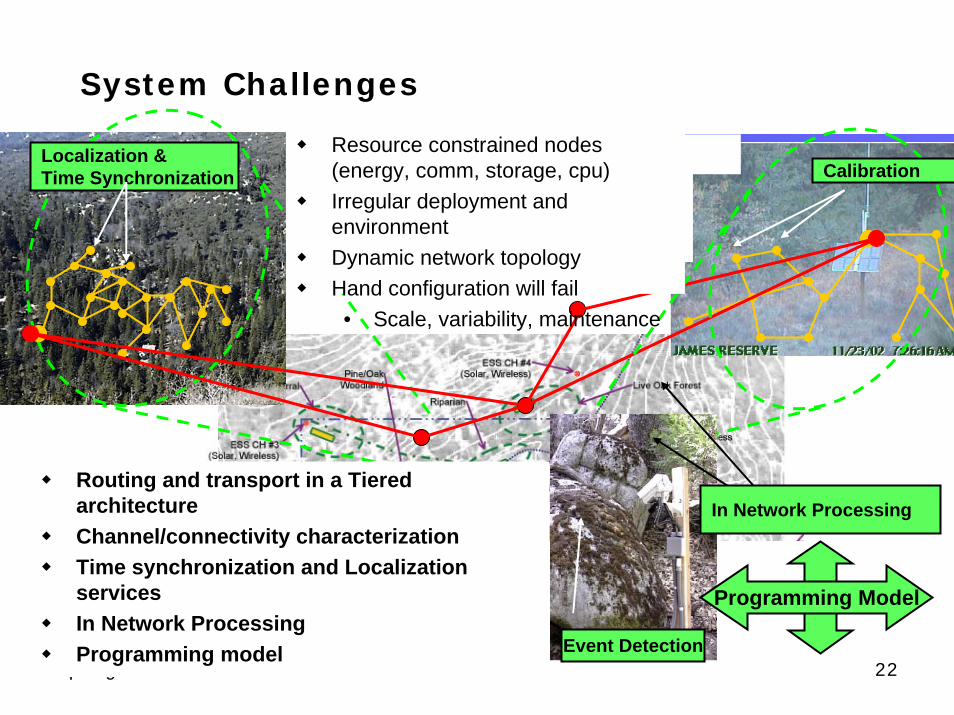
Spring 2006 CS 649 22Event Detection
Localization &Time Synchronization Calibration
Programming Model
In Network Processing
Resource constrained nodes (energy, comm, storage, cpu)Irregular deployment and environmentDynamic network topology Hand configuration will fail
• Scale, variability, maintenance
Routing and transport in a Tiered architectureChannel/connectivity characterizationTime synchronization and Localization servicesIn Network ProcessingProgramming model
System Challenges

Tiered Architecture for scalability, longevity
Spring 2006 CS 649 23
• One size does not fit all….Combine heterogeneous devices as in memory hierarchies
• Small battery powered Motes (Mica2 8 bit microcontrollers, TOS, 10s of Kbps, ~600kbytes storage) hosting in situ sensors
• Larger solar powered Microservers (32-bit processors, linux OS, 10s of Mbps, ~100 Mbytes storage)
• Data centric routing/transport at both levels• Pub/sub bus over 802.11 to Databases, visualization, analysis• Tinydiffusion: multihop transport, tasking over duty-cycling MAC

Network Architecture: Can we adapt Internet protocols and “end to end” architecture?
Spring 2006 CS 649 24
• Internet routes data using IP Addresses in Packets and Lookup tables in routers• Humans get data by “naming data” to a search
engine• Many levels of indirection between name and IP
address• Works well for the Internet, and for support of
Person-to-Person communication
• Embedded, energy-constrained (un-tethered, small-form-factor), unattended systems cant tolerate communication overhead of indirection

Characterizing wireless channels
Spring 2006 CS 649 25
• Great variability over distance (50-80% of communication range, vertical lines). • Reception rate not normally distributed around mean and standard deviation. • Real communication channel is not circular.
• 5 to 30% asymmetric links.• Not correlated with distance or transmission power. • Primary cause: differences in hardware calibration (rx sensitivity, energy levels, etc.).
• Time variations correlated to mean reception rate, not distance from transmitter.
Asymmetry vs. PowerReception v. DistanceStandard Deviation v. Reception rate

Data Centric Routing
Spring 2006 CS 649 26
• Data centric approach has the right scaling properties
• name data (not nodes) with externally relevant attributes (data type, time, location of node, SNR, etc)
• diffuse requests and responses across network using application driven routing (e.g., geo sensitive)
• support in-network aggregation and processing
• Not just end to end data delivery
• Not just a database query--storage is also constrained
* Heidemann et.al. SOSP ‘01, ** Krishnamachari et al. ‘02
Communication Radius
Average Packet/Energy Overhead

Time Synchronization Service
Spring 2006 CS 649 27
• Also crucial in many other contexts• Ranging, tracking,
beamforming, security, MAC, aggregation etc.
• Global time not always needed• NTP: often not accurate or flexible
enough; diverse requirements!• New ideas
• Local timescales• Receiver-receiver sync• Multihop time translation• Post-facto sync
• Mote implementation• ~10 µs single hop• Error grows slowly over hops
Sender Receiver
NIC
Physical Media
NIC
Propagation Time
Receiver
NICI saw itat t=4 I saw it
at t=5
1
3
2
A4
8
C
5
76B
10D
11
9
1
3
2
4
8
5
76
10 11
9

Localization of Sensor Nodes
Spring 2006 CS 649 28
01,0002,0003,0004,0005,0006,0007,0008,0009,000
10,000
10 20 30 40 50 60 70 80 90 100
No. of Unknown Nodes
MFl
ops
Distributed Centralized
0
50
100
150
200
250
300
-4.00 -3.20 -2.40 -1.60 -0.80 0.00 0.80 1.60 2.40 3.20 4.00Difference of Error Distanec
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.410
-1
100
101
102
angle measurementsdistance measurements
• Robust ranging• Wideband acoustics
• Scalable distributed algorithms• Collaborative
multilateration(with beacons)
• Geometry-driven beacon-less
• Fundamental error analysis• Cramer-Rao bounds for
multihop• Geometry effects• Angle vs. distance
• Implementation• MK-II platform with
ultrasound ranging• IPAQs, Mica2s
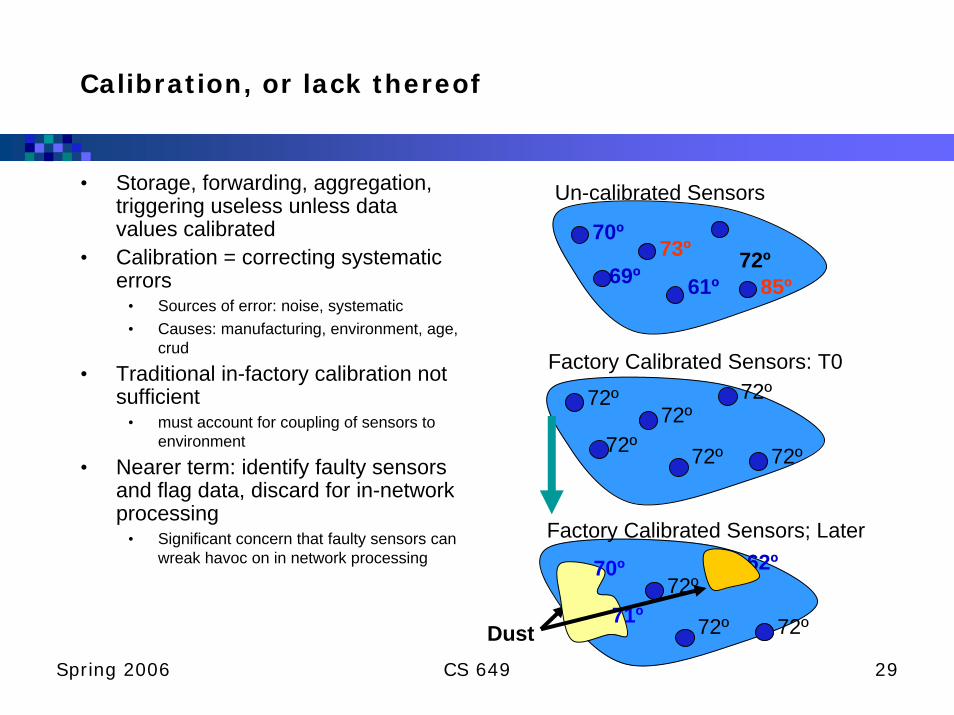
Calibration, or lack thereof
Spring 2006 CS 649 29
• Storage, forwarding, aggregation, triggering useless unless data values calibrated
• Calibration = correcting systematic errors
• Sources of error: noise, systematic• Causes: manufacturing, environment, age,
crud
• Traditional in-factory calibration not sufficient
• must account for coupling of sensors to environment
• Nearer term: identify faulty sensors and flag data, discard for in-network processing
• Significant concern that faulty sensors can wreak havoc on in network processing
Dust
70º
85º69º73º
61º72º
Un-calibrated Sensors
72º
72º
72º
62ºFactory Calibrated Sensors; Later
72º
72º72º72º
72º
72ºFactory Calibrated Sensors: T0
70º
71º

In Network Processing:Distributed Representation, Storage, Processing
Spring 2006 CS 649 30
• In network interpretation of spatially distributed data• Statistical or model based filtering• In network “event” detection and reporting• Direct queries towards nodes with relevant data• Trigger autonomous behavior based on events
• Expensive operations: high end sensors or sampling• Robotic sensing, sampling
• Support for Pattern-Triggered Data Collection• Multi-resolution data storage and retrieval
• Index data for easy temporal and spatial searching• Spatial and temporal pattern matching
• Trigger in terms of global statistics (e.g., distribution)• Exploit tiered architectures
K V
K VK V
K VK V
K V
K V K VK V
K VK V
Tim
e

Tiered Data Processing
Spring 2006 CS 649 31
• Processing uses a two tiered network.• Task divided into local
computation and cluster head computation.
• Scope of local computation depends on relative cost of local (blue-blue) and cluster-head (blue-red) communication
• Example: identify regions over which large gradient occurring
• Locally, large gradients detected and traversed (up to some scope)
• Gradients paths over length threshold identified and reported
• Each cluster head combines identification results and classifies

Spring 2006 CS 649 32
NIMS Architecture: Robotic, aerial access to full 3-D environment
Enable sample acquisitionCoordinated Mobility
Enables self-awareness of Sensing Uncertainty
Sensor DiversityDiversity in sensing resources, locations, perspectives, topologiesEnable reconfiguration to reduce uncertainty and calibrate
NIMS InfrastructureEnables speed, efficiencyLow-uncertainty mobilityProvides resource transport for sustainable presence
Networked Info Mechanical Systems (NIMS)

Actuation: NIMS Adaptive Diversity
Spring 2006 CS 649 33
FixedAcousticSensor
FixedImageSensor
SensingObstacle
MobileSource
MobileSensing
Node
Fixed NodeRedeploymentMobile
SamplingNode

Em*: Software environment for developing and deploying wireless sensor networks
Spring 2006 CS 649 34
Radio
Topology Discovery
Collaborative SensorProcessing Application
NeighborDiscovery
ReliableUnicast
Sensors
LeaderElection
3d Multi-Lateration
Audio
TimeSync
AcousticRanging
StateSync
Domain Knowledge
Reusable Software(Flexible Interconnects;
not a strict “stack”)
Hardware

Em* Supports A Slow Descent into Reality
Spring 2006 CS 649 35
• EmStar allows the same Linux code to be used• In a pure (low-fidelity) simulation• Mostly simulated, but using a real wireless channel• In a real testbed, small-scale but high-visibility• Deployed, in-situ, at scale -- but low visibility
• Advantage over traditional simulators: the debugged code itself, not just the high-level concepts, flow from simulation into the real world
• To maintain high visibility, we trade scale for reality

Research Challenge:Macroprogramming*
Spring 2006 CS 649 36
• How to specify what, where and when?• data modality and representation,
spatial/temporal resolution, frequency, and extent
• How to describe desired processing?• Aggregation, Interpolation, Model
parameters• Triggering across modalities and
nodes• Adaptive sampling
• Primitives• Annotated topology/resource
discovery• Region identification and
characterization• Intra-region
coordination/synch• System health data, alerts
• Topology, Resources (energy, link, storage)
• Sensor data management (buffering, timing)
Lessons
Spring 2006 CS 649 37
• Channel models
• Simplistic circular channel models can be very deceiving so experimentation and emulation are critical
• Named data
• Is the right model but its only a small step toward the bigger problem of in-network processing, macroprogramming
• Duty cycling
• Critical from the outset…and tricky to get right--granularity, level (application or communication)
• Tiered Architectures
• Optimal distribution of resources (energy, storage, comm,cpu) across the distributed system is an interesting problem
• NIMS provides an exciting/powerful tier in system ecology
• Systems need to be programmable/taskable

High level research questions
Spring 2006 CS 649 38
• What element and system behaviors must we design into these large scale, physically coupled, inherently distributed, autonomous systems?
• How can we program large aggregates of physically distributed and dynamic elements?
• What forms of spatio-temporal processing can take advantage of the spatial distribution and organization of ENS systems?
• What are the tradeoffs between actuation and sensing in hybrid systems and what distributed control techniques apply to sensor rich environments?
• What are the fundamental design principles relevant to ENS?

Rational for course content and organization
Spring 2006 CS 649 39
• Fundamental building blocks• MAC• Self configuring topology• Data dissemination• Time and Location synchronization• Storage
• Advanced topics (i.e., research topics)
• Collaborative processing• Adaptive applications• Programming and authoring systems