cosecivi'15 - a summary of player assessment in a multi-uav mission planning serious game
TRANSCRIPT

Applied Intelligence & Data Analysishttp://aida.ii.uam.es
Universidad Autónoma de Madrid
Applied Intelligence & Data Analysishttp://aida.ii.uam.es
Universidad Autónoma de Madrid
A Summary of Player Assessment in aMulti-UAV Mission Planning Serious Game
Víctor Rodríguez-Fernández
Cristian Ramirez Atencia
David Camacho
1

Index
❖ Introduction
❖ The Mission Planning Problem
❖ Developing a Mission Planning Videogame
❖ Modelling Mission Planning as a CSP
❖ Player Plan Assessment
❖ Experimentation
❖ Conclusions
❖ Future Work
2

Introduction
❖ UAVs (Unmanned Aerial Vehicles) currently booming
➢ Coastal surveillance
➢ Road traffic
➢ Agriculture
❖ UAS (Unmanned Aircraft Systems)
➢ A GCS (Ground Control Station) manage UAVs
3

Introduction
❖ UAV operators
➢ Critical responsibilities on a mission
➢ 1 operator - N UAVs (Future)
❖ Assessing and training UAV operators
➢ Shortage of qualified UAV pilots (Future)
➢ Redesign of training systems
■ New Methods: Videogames
■ Skills to train: Monitoring, Decision Making, Planning
4

Objectives
❖ Develop a Multi-UAV Mission Planning Videogame
➢ Accessible for inexperienced users
➢ Testbed for assessing player planning skills
❖ Design a Multi-Objective Optimization Algorithm to compute optimal Mission Plans
❖ Assess and rank player performance comparing them with the optimal algorithm designed
5

The Mission Planning Problem
❖ Multi-UAV Mission Planning Problem:➢ N tasks➢ M UAVs
❖ Each task defines:➢ An action➢ In a specific geographic area➢ In a specific time interval➢ Needs an amount of sensors

The Mission Planning Problem
❖ Each UAV has some specific characteristics:
➢ Initially positioned at some coordinates
➢ Initially filled with an amount of fuel
➢ An amount of sensors available

The Mission Planning Problem
❖ The problem is solved by:
➢ Assigning each task a vehicle that can perform it
➢ Giving a specific order to tasks performed by same vehicle

Developing a Mission Planning Videogame
❖ Web architecture
➢ Server: Data & Logic (NodeJS)
➢ Client: Control & Visualization (Phaser)
➢ Communication via Websockets
❖ High portability and accessibility
➢ Collect big amounts of data easily
Player data
Player data
Player data
9

Developing a Mission Planning Videogame
❖ Graphical User Interface
10

Developing a Mission Planning Videogame
❖ Intuitively assign/unassign UAVs to tasks (areas)
11
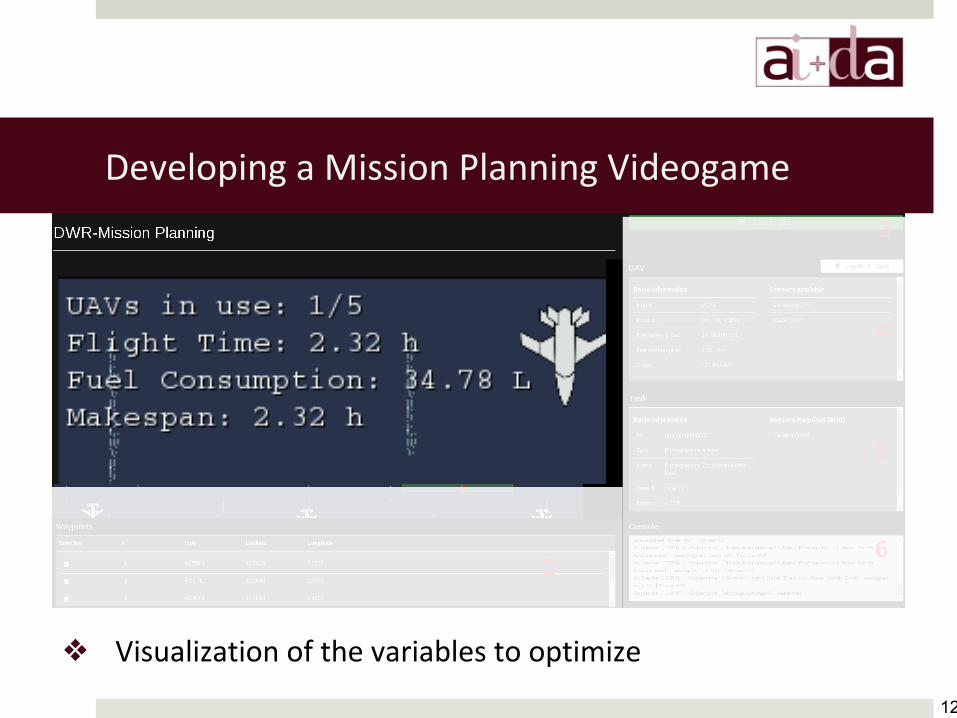
Developing a Mission Planning Videogame
❖ Visualization of the variables to optimize
12

Developing a Mission Planning Videogame
❖ Information and requirements of UAVs and Tasks
13

Modelling Mission Planning as a CSP
❖ Mission Planning can be represented as a Constraint Satisfaction Problem (CSP) with temporal constraints, i.e., a Temporal Constraint Satisfaction Problem (TCSP).

Modelling Mission Planning as a CSP
❖ Variables:
➢ Assignments of tasks to UAVs
➢ Orders of the tasks

Modelling Mission Planning as a CSP
❖ Constraints:
➢ Order Constraints
➢ Temporal Constraints
➢ Sensor Constraints
➢ Fuel Constraints

Modelling Mission Planning as a CSP
❖ The problem is turned to a Constraint Satisfaction Optimization Problem (CSOP), which minimizes:
➢ Number of UAVs employed
➢ Fuel Consumption
➢ Flight Time
➢ Makespan of the mission
❖ Multi-Objective Branch&Bound (MOBB) is used to obtain the Pareto Optimal Frontier (POF)

Player Plan Assessment
❖ Pareto Optimal Frontier (POF) computed with the MOBB algorithm
➢ Contains the optimal Mission Plans for a set of optimization variables
18

Player Plan Assessment
❖ Measurement of the quality of a player’s plan
➢ Player = Point in the optimization variables space
➢ Score(player) = Distance to the nearest point in the POF
➢ The less score the better ranking position
➢ Normalization to [0,1] interval
19
Player XPlayer Y
Player X is better than Player Y

Player Plan Assessment - Example
❖ Video gameplay results:
❖ Score (Distance to POF): 0.1258
20
UAVs in use 5
Flight Time 13.04 h
Fuel Consumption 195.57 L
Makespan 2.98 h

Experimentation
❖ Mission Scenario Setup
➢ 5 UAVs
■ Speed: 100 Km/h
■ Fuel Consumption Rate: 0.15 L/Km
■ Initial amount of fuel: 100 L
➢ 8 Tasks
21

Experimentation
❖ Mission Scenario Setup
➢ 5 UAVs
■ Speed: 100 Km/h
■ Fuel Consumption Rate: 0.15 L/Km
■ Initial amount of fuel: 100 L
➢ 8 Tasks
➢ Optimization variables
■ Makespan
■ Fuel Consumption
❖ 112733 possible Mission Plans (See Figure)
22

Experimentation
❖ Experimental results with 15 novice players
➢ Clear distinction among players
➢ Most points are located in the center of the space.
■ Novice players tend to balance the optimization variables
➢ 1 player achieves best score (distance to the POF = 0)
23

Conclusions
❖ We have presented:
➢ Analysis Framework based on videogames
➢ Make Mission Planning Problem more accessible and simpler for non-expert users
➢ Mission Planner, which models the problem as a CSP, and solves it using MOBB
❖ We have tested the environment:
➢ 15 players designing a Mission Plan for a specific Mission Scenario
➢ Results are compared to POF from Mission Planner
➢ Players are clearly distinguished and ranked
24

Future Work
❖ Extend the videogame:
➢ Create more complex plans
➢ Introduce gamification elements (tutorials, levels)
➢ Include identification to track player’s gameplays
❖ Use Multiobjective Evolutionary Algorithms (MOEAs), such as SPEA2 or NSGA-II instead of MOBB, and compare their performance

Future Work
❖ Our current environment (from Airbus Defence & Space Spain)
➢ SAVIER – Situational Awareness Virtual EnviRonment. Communication and Interaction with UAS Open Innovation Project
Atlante GCS

You’re invited to...
❖ Try our simulator at:
http://goo.gl/exJrIZ
Finally
❖ We would be extremely grateful if you send your comments to:

Applied Intelligence & Data Analysishttp://aida.ii.uam.es
Universidad Autónoma de Madrid
Applied Intelligence & Data Analysishttp://aida.ii.uam.es
Universidad Autónoma de Madrid
Thank you!!
CoSECiVi ’ 15
June 24, 2015, Barcelona, Spain
A Multi-UAV Mission Planning Videogame-basedFramework for Player Analysis
29