copyright 2007-2009 © iprs project novelty detection and 3d shape retrieval paulo drews jr
TRANSCRIPT

Copyright 2007-2009 © IPRS Project
Novelty Detection and 3D Shape Retrieval
Paulo Drews Jr
Copyright 2007-2009 © IPRS Project
March, 2009
2 3 4 5 6 7 8
9 10 11 12 13 14 15
16 17 18 19 20 21 22
23 24 25 26 27 28 29
Gaussian Mixture Model
Shape Retrieval (Mathematical Space of GMM) CARMEN Integration / Experiment
Change Detection Algorithm

Steps of the work1 – Gaussian Mixture Models
Implemented in C/C++ based in Cluster Library from Charles A. Bouman (Purdue University)
Automatically compute the number of GMM
Speedup but it isnt realtime with a lot of points (>5000) yet.
Look for a method to reduce the number of points (size of the grid in occupancy grid)
Generate more than one GMM to one “shape”, solve it with a prior knowledge.

Steps of the work
2 – Change Detection
Implemented in C/C++ using EMD library from Carlo Tomasi (Duke University)
Works fine using a greedy algorithm (Fast)
Possible implements something to detect false positive

Steps of the work3- Shape Retrievel
Implemented in C/C++ based in the library levmar from Manolis Lourakis (Foundation for Research and Technology – Hellas)
Hard to solve underdetermined problem, 6 variables but only 3 equation(using 3 eigenvalues).
Need a bayes classifier ?
Problem to compute the eigenvalue of non-symmetric matrix (generalized eigenvalue) – Look for a new library

Steps of the work3- Shape Retrievel
Instead of using basic shapes(plane,sphere), using a superquadrics
less than 1: a pointy octahedron with concave faces and sharp edges.
exactly 1: a regular octahedron.
between 1 and 2: an octahedron with convex faces, blunt edges and blunt corners.
exactly 2: a sphere
greater than 2: a cube with rounded edges and corners.
infinite (in the limit): a cube

Steps of the work
4- Integration with Carmen/Tests
Meeting with João Monteiro to define details.
Start with 2D maps and Change Detection
After implemented the 3D maps, try put the shape retrievel in Carmen.
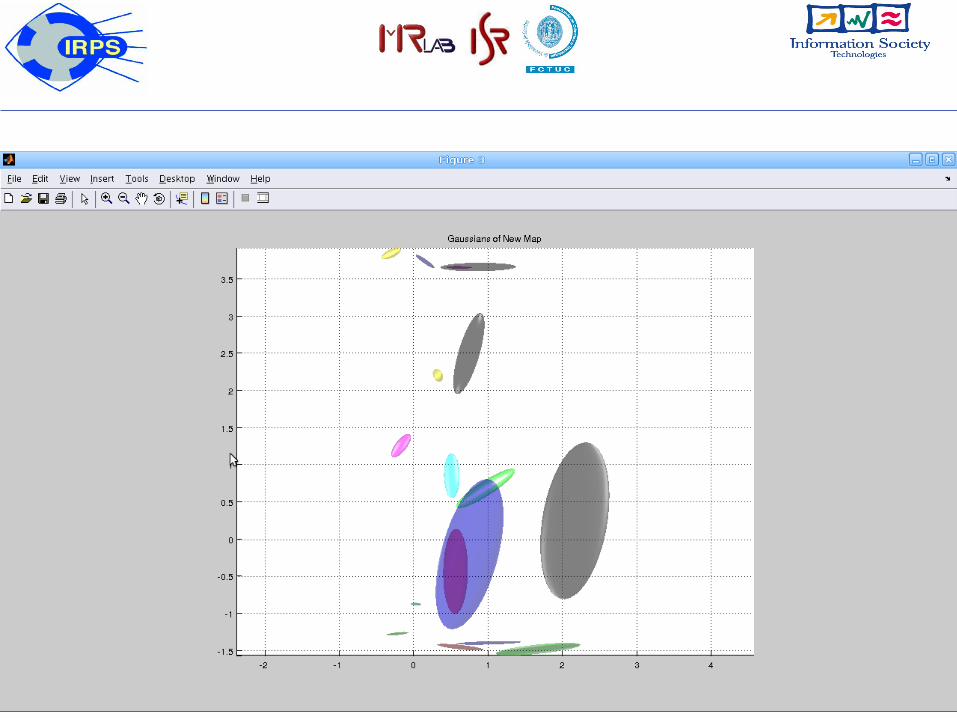
Some tests
Real Data
Old Data – The Door (2160 points)
New Data – The Corridor with the door (40000 points)
Uknown the Number Classer – 20 Class the maximun size
Time Processing – 118 s

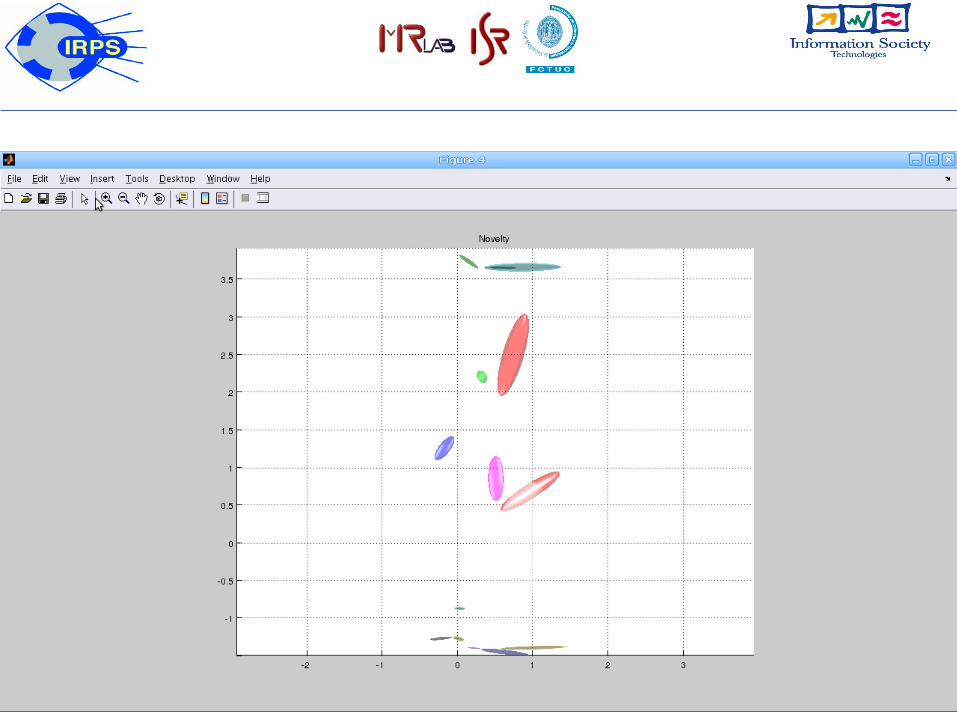

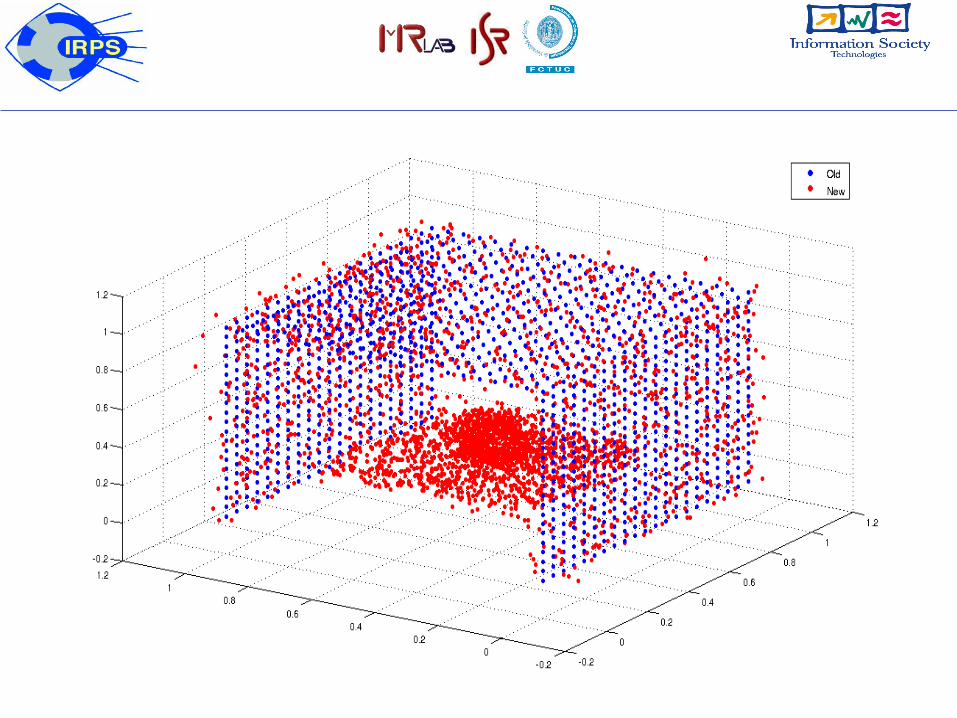
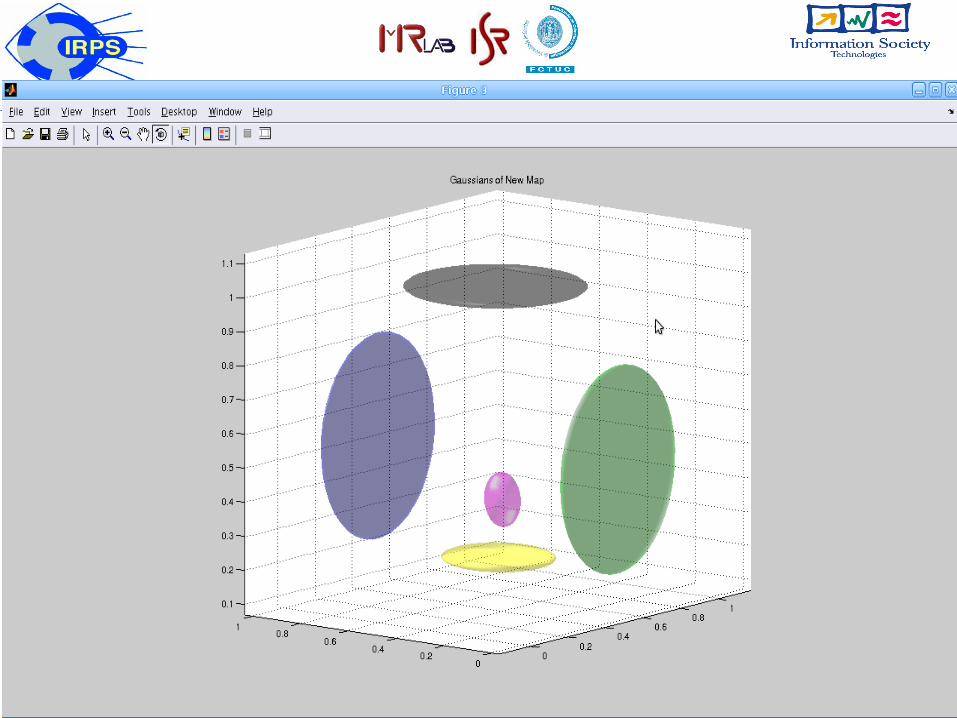
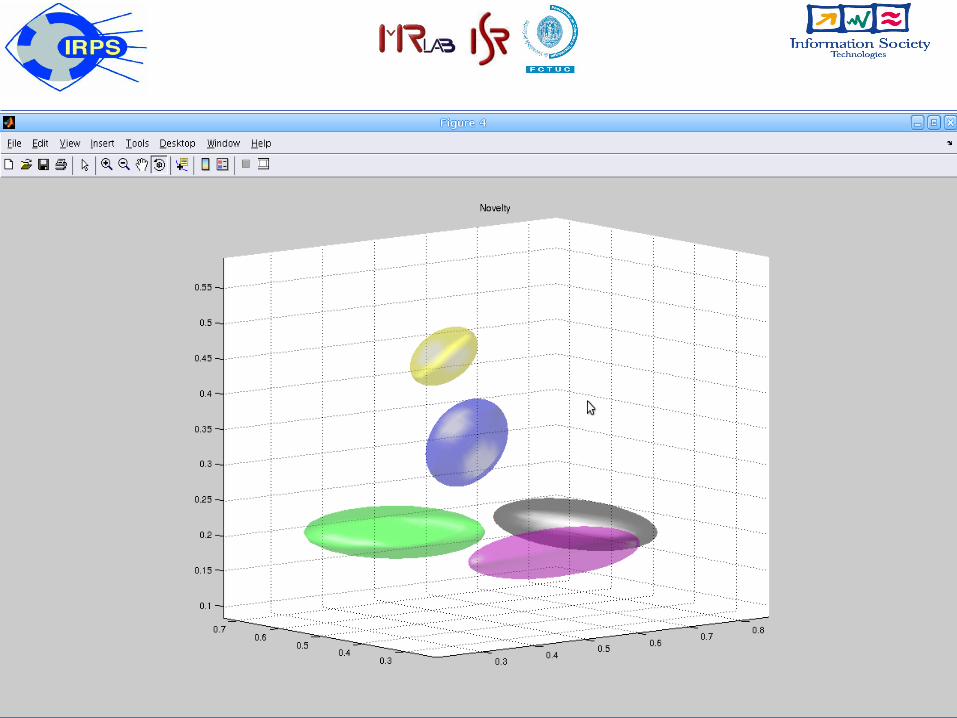
Some tests2- Simulated data
Old Data – Corridor (1323 points)
New Data - Corridor + Desk + Ball (2960 points)
Time processing – without knowledge 3.8 s / with knowledge 3 s



Copyright 2007-2009 © IPRS Project
End