cooperative uavs for remote data collection and relay
TRANSCRIPT

.1
Cooperative UAVs for Remote Data Collection and Relay
Kevin L. Moore Michael J. White, Robert J. Bamberger,and David P. Watson
Systems and Information Science GroupResearch and Technology Development Center
Johns Hopkins University Applied Physics Laboratory
presented at
2005 AUVSI North America Conference and ExpoBaltimore, Maryland
June 2005

.2
Outline
Dynamic Surveillance NetworksDSNs for Data Exfiltration– Project Concept– Hardware– Architecture
DSN Algorithmic Approach– Consensus Variables– Global Optimization via Coordination
Preliminary ResultsConclusions

.3
Dynamic Surveillance Networks
Network of “entities”– Communication infrastructure– Entity-level functionality– Implied global functionality– Not necessarily homogeneous
Surveillance: – Primarily considering entities that are sensors– “Bigger picture” includes actors as well
Dynamic– Entities may be mobile– Communication topology might be time-varying– Data actively and deliberately shared among entities– Decision-making and learning

.4
Motivating Example 1
Autonomous swarm for plume tracking
Sensor-carrying UAVs and UGVsassess and track the developmentof a hazardous plume resulting from a CBR terrorism act.

.5
Motivating Example 2
Autonomous confederation building, adaptive to changes in battlefield conditions
Confederation A
Confederation B
Target Cluster ATarget Cluster B
Confederation A
Confederation B
Target Cluster ATarget Cluster B
Confederation A
Confederation B
Target Cluster ATarget Cluster B
Confederation A
Confederation B
Target Cluster ATarget Cluster B

.6
Outline
Dynamic Surveillance NetworksDSNs for Data Exfiltration– Project Concept– Hardware– Architecture
DSN Algorithmic Approach– Consensus Variables– Global Optimization via Coordination
Preliminary ResultsConclusions

.7
DSN Data Exfiltration Project
Demonstrate UAVs data collection from unattended ground sensors– Clusters of low-power, unattended sensors– Cluttered urban environment– Cooperating UAVs for fly-by data collection
Payload limits restrict rangeRun-time issues dictate need for “smart” operation

.8
DSN Data Exfiltration Project
Data exfiltration applicationSensor clusters are deployed “by hand”Not all clusters can communicate with each otherExact cluster locations are not known
UAVs execute a cooperative search to find the clusters− Search begins with a pre-planned raster scan− Search is refined based on cluster discovery results
After discovery, UAVs cooperate to collect data from all the clusters in some optimal way
− UAVs configure to provide maximum coverage of clusters or
− An optimal path is planned to travel between clusters

.9
Adaptation occurs in response to changes in the UAV resources or the sensor clusters:
− If a sensor cluster is lost the UAVscooperatively reconfigure
− Periodically, one of the UAVs returns to the base station to relay data from the senor clusters; when this happens the remaining UAV automatically re-plans its operations
DSN Data Exfiltration Project
.10
DSN Data Exfiltration Project
Leverages Several Previous APL Efforts– UAV for fly-by data collection– UAV for data-hopping between ground nodes– Coordinated (central control) of multiple UGVs– Cooperative control of UGVs for search applications– Communication framework for cooperative autonomy networks
(802.11-based) – Distributed (swarm-like) UGVs and UAVs demonstrating emergent
behavior:Heterogeneous Mix of Small Ground & Air VehiclesCo-Fields Behavior AlgorithmsCommon Supervisory Control ArchitectureCollaborative Field Testing with Army Research Lab, Aberdeen.Initial Focus on Distributed ISR Application

.11
.12
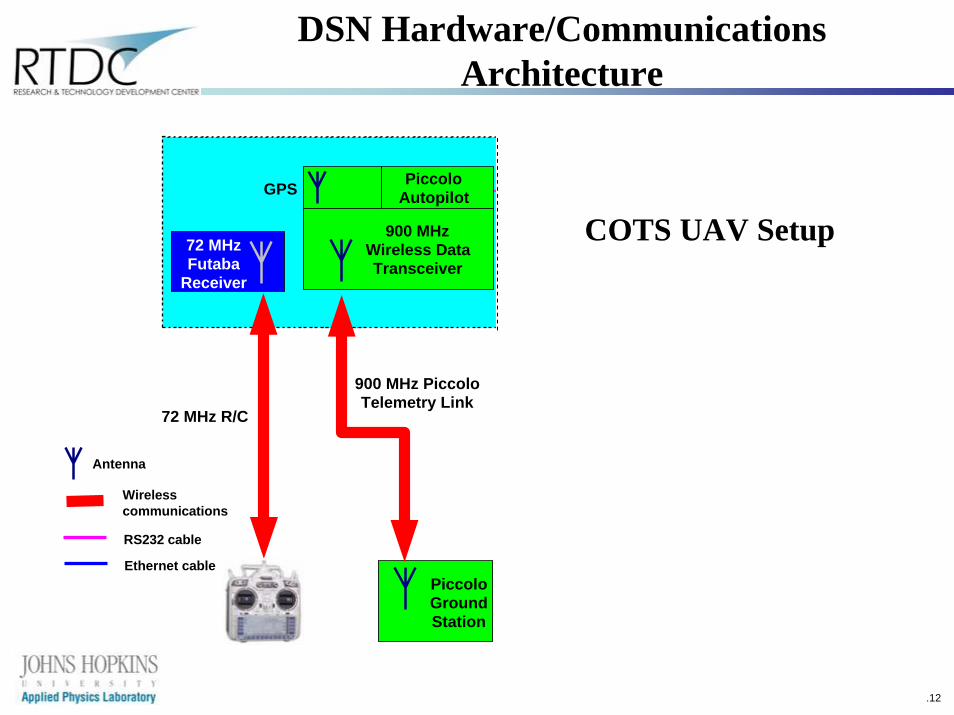
DSN Hardware/Communications Architecture
PiccoloAutopilot
900 MHzWireless DataTransceiver
72 MHz R/C
GPS
Antenna
Wirelesscommunications
RS232 cable
72 MHzFutaba
Receiver
Ethernet cable
What we added
Normal Setup
Applied Data SystemsBitsy Plus Single Board
Computer
UAV Fuselage
2.4 GHz 802.11b CiscoPCMCIA Client Adapter
APL GroundStation
2.4 GHz802.11b NetworkCommunications
Second UAVCisco Access
PointLaptop
COTS UAV Setup
PiccoloGroundStation
900 MHz PiccoloTelemetry Link

.13
DSN Architecture Concept
Servos
Reactive Control
Advanced Autopilot
VehicleSensors
TraditionalAutopilot
with Add-ons
Airframe
External Environment
Waypoints
GPS IMU
Communication System
Mission Payload(Sensor)
Users, Other Vehicles
ReactiveSensors
Arbitrator
Data
Supervisory Control
LocalDecision
Logic
Cooperative Decision
Logic
Autonomy Board
Future work
.14
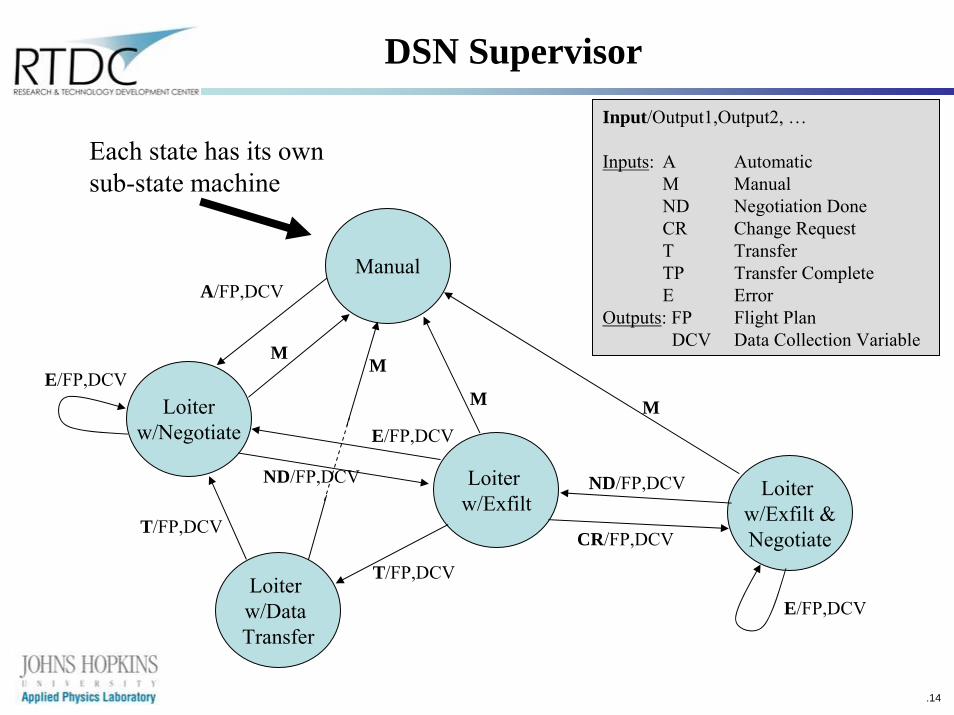
DSN Supervisor
Loiterw/Negotiate
Manual
Loiter w/Data Transfer
Loiter w/Exfilt
Loiter w/Exfilt &Negotiate
A/FP,DCV
M
MM
M
E/FP,DCV
T/FP,DCV
E/FP,DCV
ND/FP,DCV
CR/FP,DCV
ND/FP,DCV
E/FP,DCV
Input/Output1,Output2, …
Inputs: A AutomaticM ManualND Negotiation DoneCR Change RequestT TransferTP Transfer CompleteE Error
Outputs: FP Flight PlanDCV Data Collection Variable
T/FP,DCV
Each state has its ownsub-state machine

.15
Outline
Dynamic Surveillance NetworksDSNs for Data Exfiltration– Project Concept– Hardware– Architecture
DSN Algorithmic Approach– Consensus Variables– Global Optimization via Coordination
Preliminary ResultsConclusions

.16
DSN Algorithmic Approach
Bigger picture is coordination and control of multiple, cooperating, heterogeneous entities:
Our technical approach, a generalization of potential field approaches, is based on so-called consensus variables and has connections to problems in:
– Coupled-oscillator synchronization
– Neural networks
7
1 2
3
4
56
89

.17
Consensus Variable Perspective
Assertion: – Multi-agent coordination requires that some information must be shared
The idea:– Identify the essential information, call it the coordination or consensus
variable.– Encode this variable in a distributed dynamical system and come to
consensus about its valueExamples:
– Heading angles– Phase of a periodic signal– Mission timings
In the following we build on work by Randy Beard, et al., at BYU, to use consensus variables to solve global problems in a distributed fashion

.18
Consensus Variables
Suppose we have N agents with a shared global consensusvariableEach agent has a local value of the variable given as Each agent updates their local value based on the values of the agents that they can communicate with
where are gains and defines the communication topology graph of the system of agentsKey result from literature: If the graph has a spanning tree then for all i
ijk ijG

.19
Example: Single Consensus Variable
7
12
3
4
56
8
9

.20
DSN Application
Example 2: Spatially locate group of resources (green) to optimally cover a group of targets (targets)
Targets and resources have some assumed strength and capability, respectively
Resources Targets

.21
DSN Application
Corresponding node equations become:
where h

.22
DSN Application
4 targets, 2 resources
6 targets, 2 resources
4 targets, 1 resource
5 targets, 6 resources

.23
Outline
Dynamic Surveillance NetworksDSNs for Data Exfiltration– Project Concept– Hardware– Architecture
DSN Algorithmic Approach– Consensus Variables– Global Optimization via Coordination
Preliminary ResultsConclusions

.24
Preliminary Test Flights at ARL-Aberdeen
N
300 ft100 m
1120B
MarshArea
Water
Water
1111
1112
1129
11271119B
S3
S2
S1
AGS

.25
Waypoint Tracking and “Pinging”
-76.087 -76.086 -76.085 -76.084 -76.083 -76.082 -76.081 -76.0839.472
39.473
39.474
39.475
39.476
39.477
39.478
39.479
39.48
39.481
39.482Connectivity Map
Longitude
Latit
ude
-76.086 -76.0855 -76.085 -76.0845 -76.084 -76.0835 -76.083 -76.0825 -76.08239.472
39.473
39.474
39.475
39.476
39.477
39.478
39.479
Latit
ude
Longitude
Connectivity Map
-76.0855 -76.085 -76.0845 -76.084 -76.0835 -76.083 -76.0825 -76.08239.473
39.474
39.475
39.476
39.477
39.478
Longitude
Latit
ude
Autonomous Flight - Tracking Two Waypoints

.26
Outline
Dynamic Surveillance NetworksDSNs for Data Exfiltration
– Project Concept– Hardware– Architecture
DSN Algorithmic Approach– Consensus Variables– Global Optimization via Coordination
Preliminary ResultsConclusions

.27
Concluding Comments
We have presented the idea of dynamic surveillance networks– Special case of a more general notion of resource networks
We discussed a specific DSN concept: data exfiltration from UGS using UAVs and presented our hardware and architectureWe presented an algorithmic approach to coordination for the data exfiltration problem
– Based on the idea of consensus variables– We have discussed extensions of these ideas to the problem of
global optimization via cooperating distributed entitiesThese ideas are being applied to our dynamic surveillance network project
– Preliminary results showed the ability to fly autonomously usingour autonomy flight board and to successfully communicate between UAVs and ground nodes