conceptos basicos
DESCRIPTION
conceptos basicos sismicaTRANSCRIPT
18
8CORDSEN, A., GALBRAITH, M. Y PEIRSE, J., 2000. “Planning Land 3-D Seismic Surveys”. Geophysical
Developments Series No. 9. Society of Exploration Geophysicists.
3.2 ADQUISICIÓN SÍSMICA
Para elaborar un diseño o patrón de adquisición sísmica que nos permita tener una imagen con
la correcta geometría y disposición de los estratos en el subsuelo, se debe tener en cuenta cierta
cantidad de parámetros y variables las cuales se detallan a continuación. En principio es
importante definir el tipo de diseño que se desea establecer en la zona de estudio. Según Cordsen
et al, existen varios tipos de arreglos que se ajustan a las necesidades y características del área de
estudio, entre ellos tenemos el diagonal, radial, pared de bloques, hexagonal, zigzag, ortogonal.
No obstante en el Proyecto Cariña Oeste 06G3D se utilizó una geometría ortogonal (donde las
líneas receptoras son perpendiculares a las líneas de tiro), por lo tanto las definiciones que
seguidamente se muestran fueron redactadas para este tipo de diseño, y no senombrarán
ecuaciones relacionadas a otro tipo de diseño ni a un levantamiento 2D, debido a que estos no son
necesarios para entender el presente informe.
3.2.1 Conceptos básicos
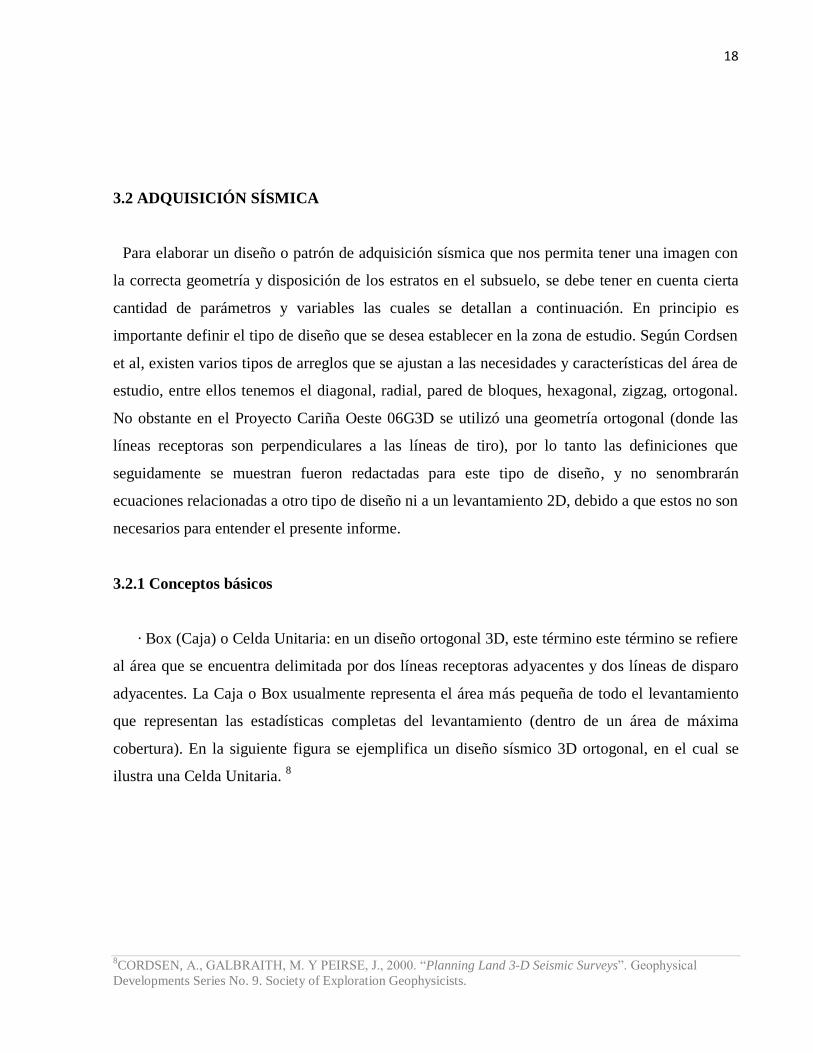
· Box (Caja) o Celda Unitaria: en un diseño ortogonal 3D, este término este término se refiere
al área que se encuentra delimitada por dos líneas receptoras adyacentes y dos líneas de disparo
adyacentes. La Caja o Box usualmente representa el área más pequeña de todo el levantamiento
que representan las estadísticas completas del levantamiento (dentro de un área de máxima
cobertura). En la siguiente figura se ejemplifica un diseño sísmico 3D ortogonal, en el cual se
ilustra una Celda Unitaria. 8
19
Fig. 3.3 Ilustración de la Celda Unitaria.
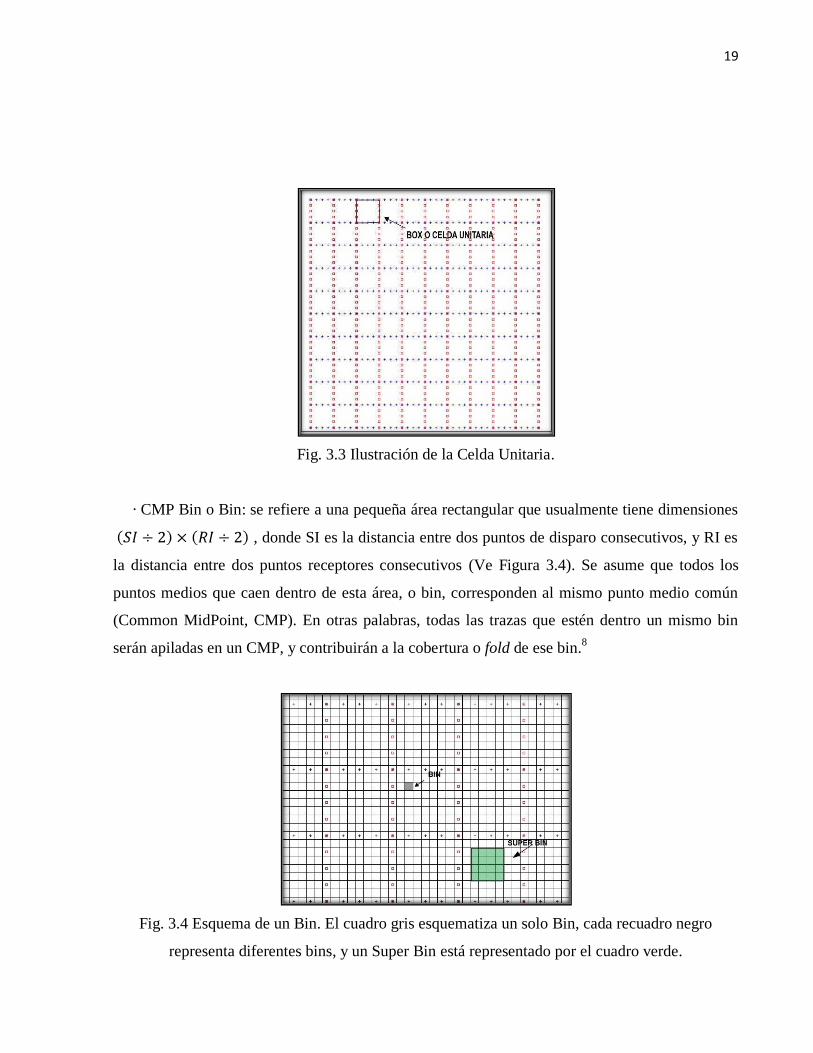
· CMP Bin o Bin: se refiere a una pequeña área rectangular que usualmente tiene dimensiones
, donde SI es la distancia entre dos puntos de disparo consecutivos, y RI es
la distancia entre dos puntos receptores consecutivos (Ve Figura 3.4). Se asume que todos los
puntos medios que caen dentro de esta área, o bin, corresponden al mismo punto medio común
(Common MidPoint, CMP). En otras palabras, todas las trazas que estén dentro un mismo bin
serán apiladas en un CMP, y contribuirán a la cobertura o fold de ese bin.8
Fig. 3.4 Esquema de un Bin. El cuadro gris esquematiza un solo Bin, cada recuadro negro
representa diferentes bins, y un Super Bin está representado por el cuadro verde.
20
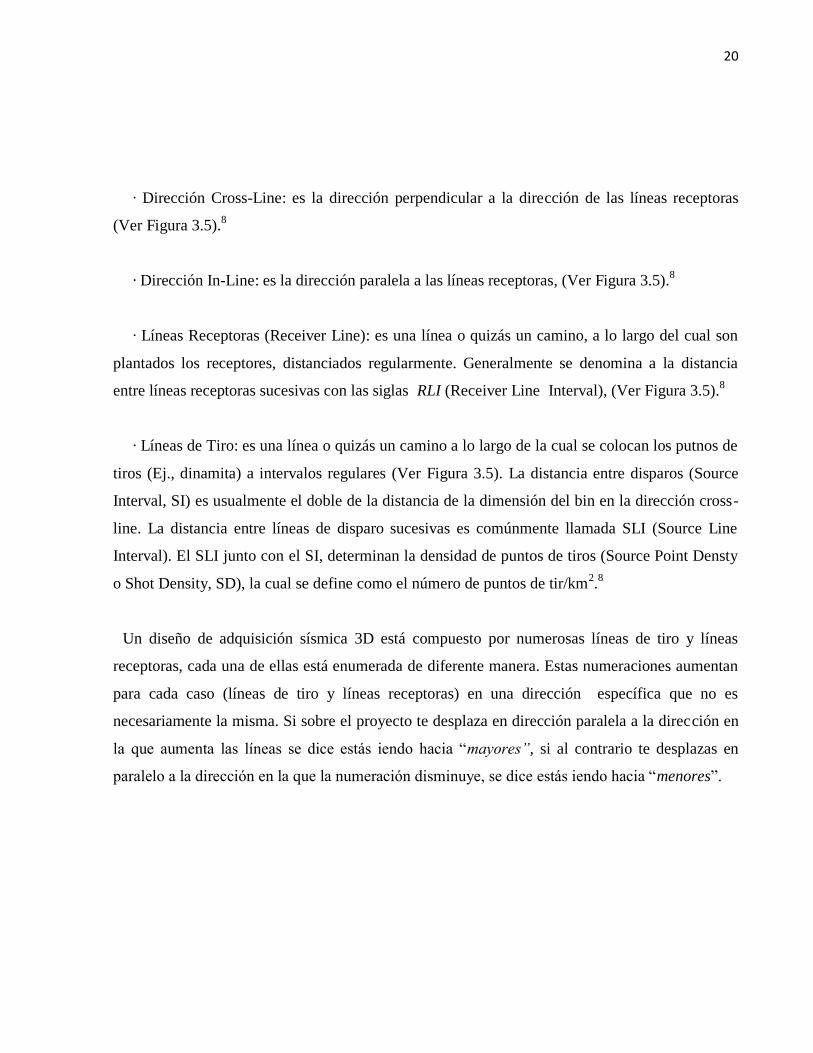
· Dirección Cross-Line: es la dirección perpendicular a la dirección de las líneas receptoras
(Ver Figura 3.5).8
· Dirección In-Line: es la dirección paralela a las líneas receptoras, (Ver Figura 3.5).8
· Líneas Receptoras (Receiver Line): es una línea o quizás un camino, a lo largo del cual son
plantados los receptores, distanciados regularmente. Generalmente se denomina a la distancia
entre líneas receptoras sucesivas con las siglas RLI (Receiver Line Interval), (Ver Figura 3.5).8
· Líneas de Tiro: es una línea o quizás un camino a lo largo de la cual se colocan los putnos de
tiros (Ej., dinamita) a intervalos regulares (Ver Figura 3.5). La distancia entre disparos (Source
Interval, SI) es usualmente el doble de la distancia de la dimensión del bin en la dirección cross-
line. La distancia entre líneas de disparo sucesivas es comúnmente llamada SLI (Source Line
Interval). El SLI junto con el SI, determinan la densidad de puntos de tiros (Source Point Densty
o Shot Density, SD), la cual se define como el número de puntos de tir/km2.8
Un diseño de adquisición sísmica 3D está compuesto por numerosas líneas de tiro y líneas
receptoras, cada una de ellas está enumerada de diferente manera. Estas numeraciones aumentan
para cada caso (líneas de tiro y líneas receptoras) en una dirección específica que no es
necesariamente la misma. Si sobre el proyecto te desplaza en dirección paralela a la dirección en
la que aumenta las líneas se dice estás iendo hacia “mayores”, si al contrario te desplazas en
paralelo a la dirección en la que la numeración disminuye, se dice estás iendo hacia “menores”.
21
9Chaouch, A., y MARI J.L., 2006.”3-D Land Seismic Surveys :Definition of Geophysical Parameters”. Oil and Gas
Science and Technology. Vol 61, No 5. P 611’630.
Fig. 3.5 Esquema de líneas de tiro y receptoras para un diseño 3D ortogonal. Nótese que el
ángulo entre receptoras y líneas de tiros es de 90o y se mantiene a lo largo de todo el diseño.
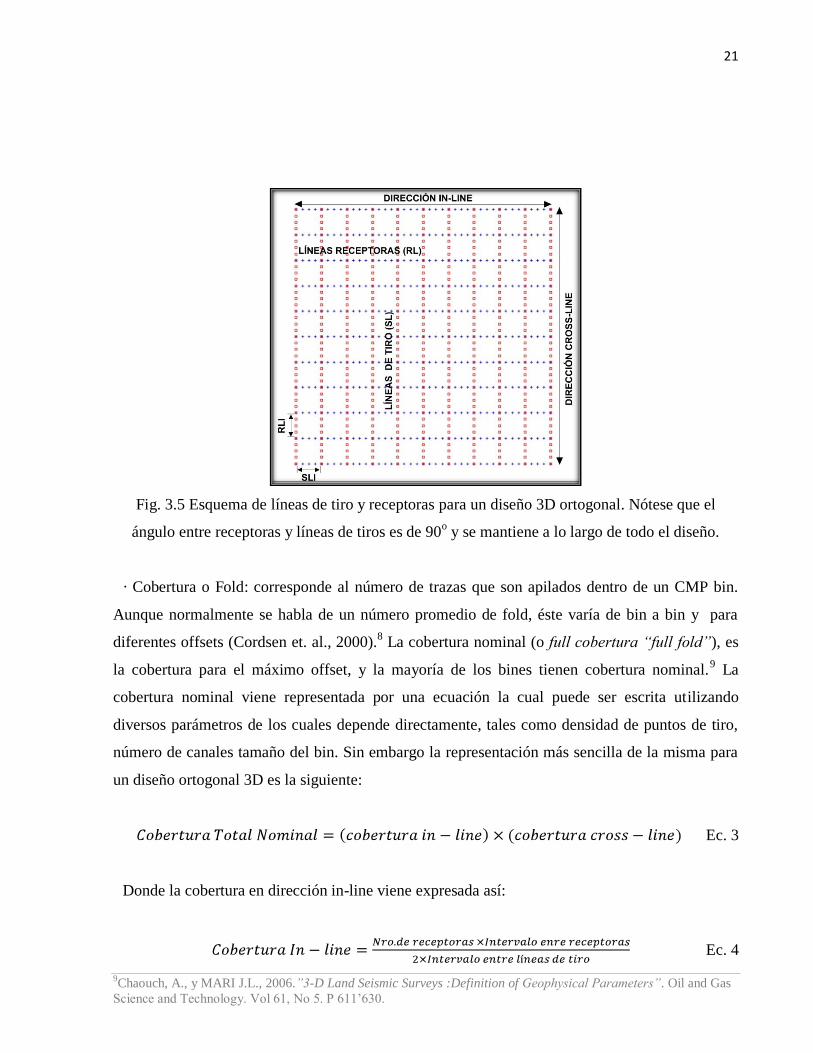
· Cobertura o Fold: corresponde al número de trazas que son apilados dentro de un CMP bin.
Aunque normalmente se habla de un número promedio de fold, éste varía de bin a bin y para
diferentes offsets (Cordsen et. al., 2000).8 La cobertura nominal (o full cobertura “full fold”), es
la cobertura para el máximo offset, y la mayoría de los bines tienen cobertura nominal.9 La
cobertura nominal viene representada por una ecuación la cual puede ser escrita utilizando
diversos parámetros de los cuales depende directamente, tales como densidad de puntos de tiro,
número de canales tamaño del bin. Sin embargo la representación más sencilla de la misma para
un diseño ortogonal 3D es la siguiente:
Ec. 3
Donde la cobertura en dirección in-line viene expresada así:
Ec. 4
22
Y la cobertura en dirección cross-line es la siguiente:
Ec. 5
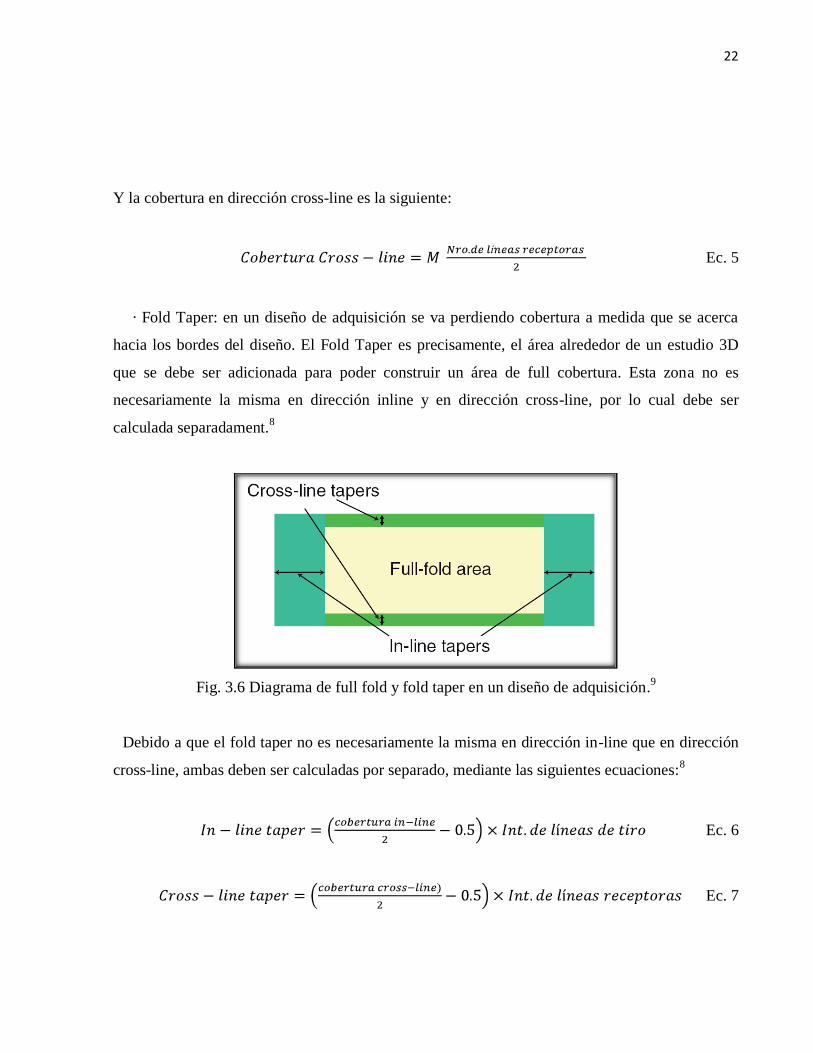
· Fold Taper: en un diseño de adquisición se va perdiendo cobertura a medida que se acerca
hacia los bordes del diseño. El Fold Taper es precisamente, el área alrededor de un estudio 3D
que se debe ser adicionada para poder construir un área de full cobertura. Esta zona no es
necesariamente la misma en dirección inline y en dirección cross-line, por lo cual debe ser
calculada separadament.8
Fig. 3.6 Diagrama de full fold y fold taper en un diseño de adquisición.9
Debido a que el fold taper no es necesariamente la misma en dirección in-line que en dirección
cross-line, ambas deben ser calculadas por separado, mediante las siguientes ecuaciones:8
Ec. 6
Ec. 7

23
· Punto Medio (Midpoint): es el punto localizado exactamente en la mitad de la distancia entre
una fuente y un receptor. Si se tiene un diseño, en el cual el patch posee 480 canales receptores,
cada punto de tiro generará 480 puntos medio.8
Fig. 3.7 Esquema del Punto Medio. Véase que en la interfaz entre dos capas con diferentes
propiedades fisicas, sean Capa 1 y Capa 2, la onda se refleja y lleva a los geófonos información
de esa interfaz. Esa información es discreta, y esos puntos corresponden a los puntos medios en
profundidad entre la fuente y el receptor.
· Patch: Se refiere a las estaciones vivas para cualquier punto de disparo en un levantamiento
3D. Usualmente lo conforma un rectángulo con varias líneas paralelas de receptores. El patch se
mueve dentro del levantamiento y ocupa diferentes posiciones.8
· Salvo: es el número de puntos de tiros disparados antes de que el template se desplace a lo
largo del levantamiento.8
24
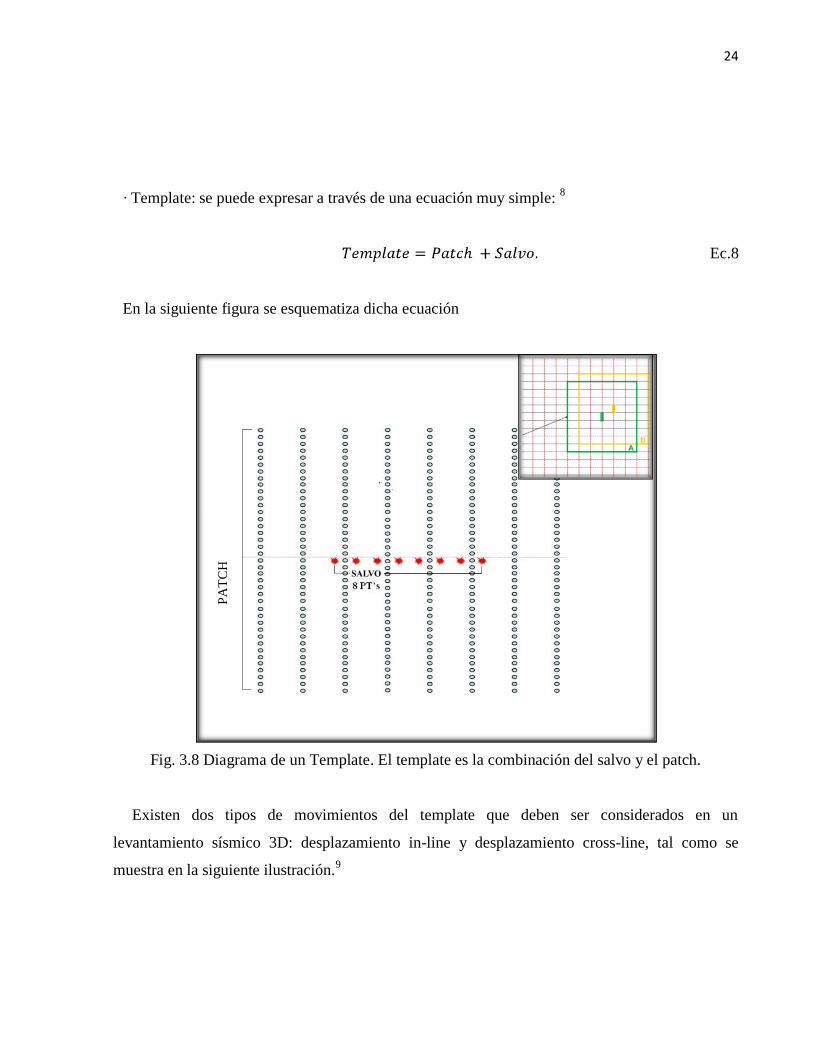
· Template: se puede expresar a través de una ecuación muy simple: 8
Ec.8
En la siguiente figura se esquematiza dicha ecuación
Fig. 3.8 Diagrama de un Template. El template es la combinación del salvo y el patch.
Existen dos tipos de movimientos del template que deben ser considerados en un
levantamiento sísmico 3D: desplazamiento in-line y desplazamiento cross-line, tal como se
muestra en la siguiente ilustración.9
PA
TC
H
hh
25
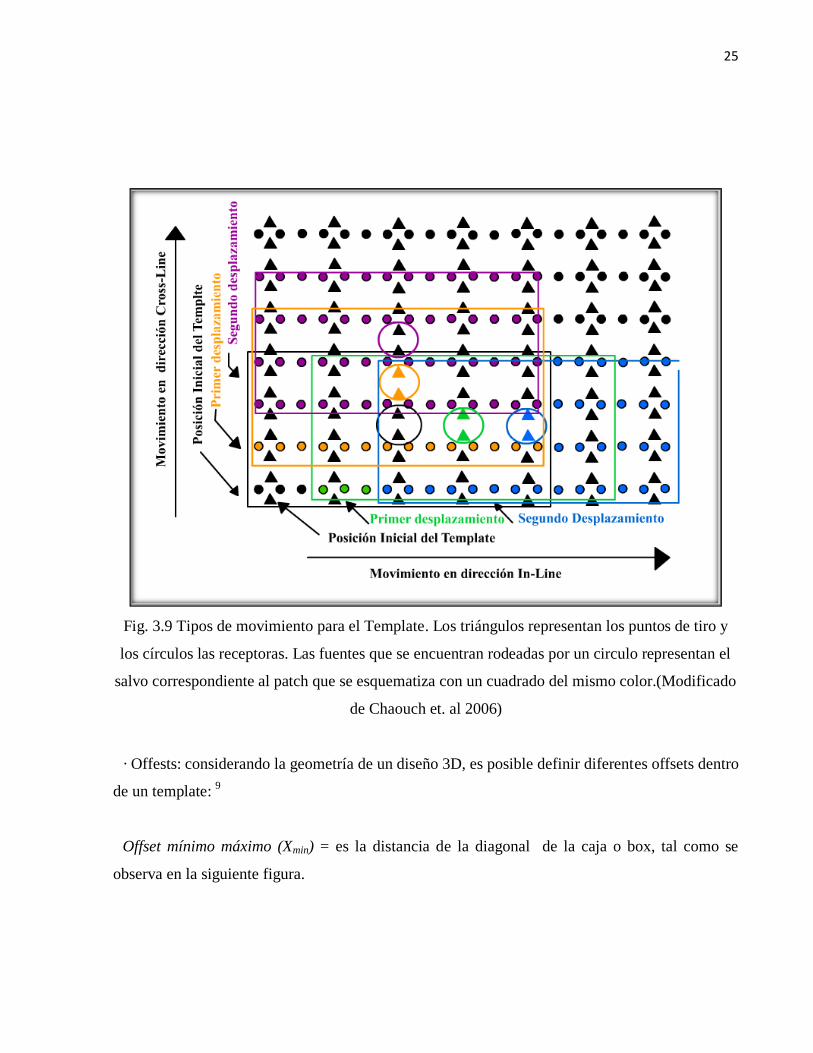
Fig. 3.9 Tipos de movimiento para el Template. Los triángulos representan los puntos de tiro y
los círculos las receptoras. Las fuentes que se encuentran rodeadas por un circulo representan el
salvo correspondiente al patch que se esquematiza con un cuadrado del mismo color.(Modificado
de Chaouch et. al 2006)
· Offests: considerando la geometría de un diseño 3D, es posible definir diferentes offsets dentro
de un template: 9
Offset mínimo máximo (Xmin) = es la distancia de la diagonal de la caja o box, tal como se
observa en la siguiente figura.

26
Fig.3.10 Diagrama representativo del Offset mínimo máximo. (Modificado de Cordsen et. al,
2000)
Por tanto viene representada por una relación trigonométrica:
Ec. 9
Offset máximo (Xmax) = es la distancia que corresponde a la mitad de la diagonal del template.
Esta distancia depende de la profundidad a la cual se encuentra el horizonte objetivo, el horizonte
que se quiere iluminar.9
27
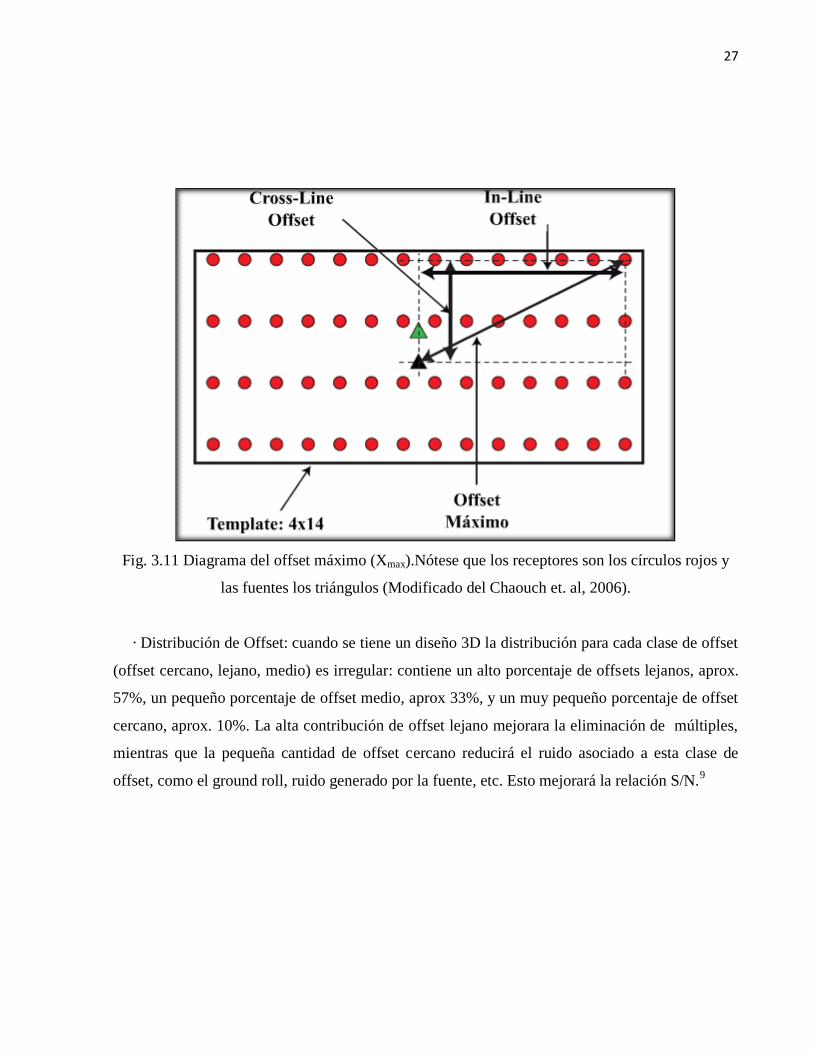
Fig. 3.11 Diagrama del offset máximo (Xmax).Nótese que los receptores son los círculos rojos y
las fuentes los triángulos (Modificado del Chaouch et. al, 2006).
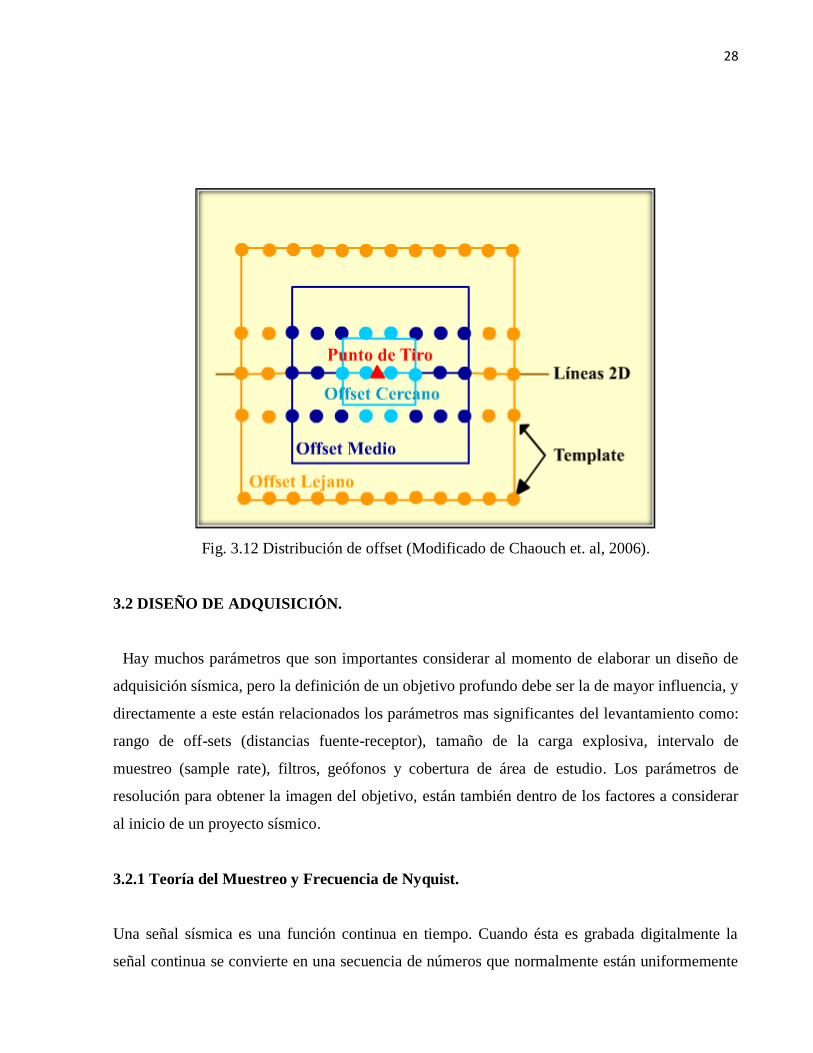
· Distribución de Offset: cuando se tiene un diseño 3D la distribución para cada clase de offset
(offset cercano, lejano, medio) es irregular: contiene un alto porcentaje de offsets lejanos, aprox.
57%, un pequeño porcentaje de offset medio, aprox 33%, y un muy pequeño porcentaje de offset
cercano, aprox. 10%. La alta contribución de offset lejano mejorara la eliminación de múltiples,
mientras que la pequeña cantidad de offset cercano reducirá el ruido asociado a esta clase de
offset, como el ground roll, ruido generado por la fuente, etc. Esto mejorará la relación S/N.9
28
Fig. 3.12 Distribución de offset (Modificado de Chaouch et. al, 2006).
3.2 DISEÑO DE ADQUISICIÓN.
Hay muchos parámetros que son importantes considerar al momento de elaborar un diseño de
adquisición sísmica, pero la definición de un objetivo profundo debe ser la de mayor influencia, y
directamente a este están relacionados los parámetros mas significantes del levantamiento como:
rango de off-sets (distancias fuente-receptor), tamaño de la carga explosiva, intervalo de
muestreo (sample rate), filtros, geófonos y cobertura de área de estudio. Los parámetros de
resolución para obtener la imagen del objetivo, están también dentro de los factores a considerar
al inicio de un proyecto sísmico.
3.2.1 Teoría del Muestreo y Frecuencia de Nyquist.
Una señal sísmica es una función continua en tiempo. Cuando ésta es grabada digitalmente la
señal continua se convierte en una secuencia de números que normalmente están uniformemente
29
10CAICEDO, M, Y ALDANA, M., 2002. “Aplicaciones Geofísicas de los Filtros Digitales”.Universidad Simón
Bolívar. Versión 1.1
espaciados en el tiempo (intervalo de muestreo). Generalmente el intervalo de muestreo utilizado
en sísmica es de 1 a 4 ms, el cual depende de la resolución vertical que se desee obtener del
subsuelo. La señal digitalizada, es una muestra discreta de la señal continua a la cual le faltan
detalles correspondientes a componentes de altas frecuencias que se perdieron durante el
muestreo (Yilmaz, 1987).
El Teorema del muestreo permite asegurar que no se pierde ninguna información al momento
de digitalizar la señal analógica si la frecuencia de muestreo es mayor que el doble del
componente de frecuencia más alto de la onda que está siendo muestreada. Esto es equivalente a
decir que debe haber por lo menos dos muestras por ciclo. El teorema de muestreo también
determina el mínimo intervalo de muestreo que se debe utilizar.5
La mitad de la frecuencia de muestreo es llamada frecuencia de Nyquist y esta es la mayor
frecuencia que se puede obtener. Para un período de muestreo de 2ms la frecuencia de Nyquist es
igual a 250 Hz. A medida que ese intervalo aumenta la frecuencia disminuye y por ende también
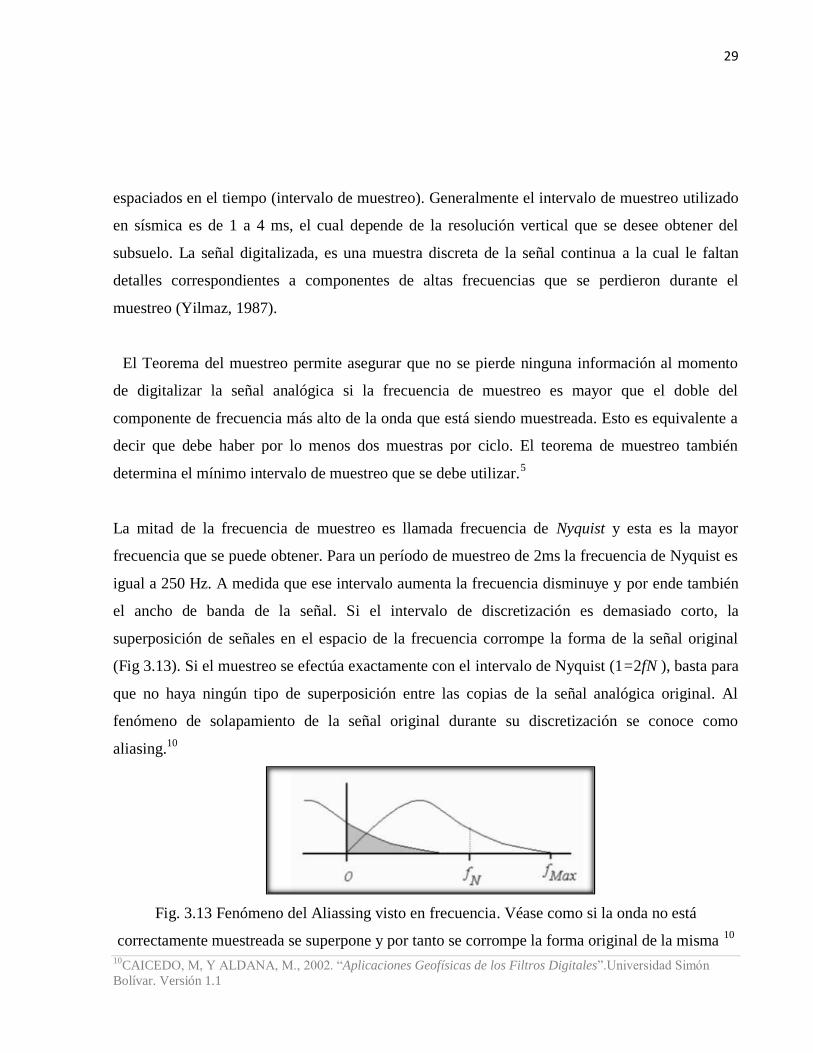
el ancho de banda de la señal. Si el intervalo de discretización es demasiado corto, la
superposición de señales en el espacio de la frecuencia corrompe la forma de la señal original
(Fig 3.13). Si el muestreo se efectúa exactamente con el intervalo de Nyquist (1=2fN ), basta para
que no haya ningún tipo de superposición entre las copias de la señal analógica original. Al
fenómeno de solapamiento de la señal original durante su discretización se conoce como
aliasing.10
Fig. 3.13 Fenómeno del Aliassing visto en frecuencia. Véase como si la onda no está
correctamente muestreada se superpone y por tanto se corrompe la forma original de la misma 10
30
Cuando el muestreo es incorrecto, las componentes de alta frecuencia (mayores que la de
Nyquist) de la señal original son trasladadas a la zona de bajas frecuencias; en consecuencia, una
señal en alias muestra componentes de baja frecuencia que están ausentes de la señal original. Por
tanto el aliasing es un inevitable, la única “solución” a esto consiste en filtrar físicamente la señal
(con un filtro pasa-bajo) antes de discretizarla, de tal forma que las componentes de alta
frecuencia que no sean de interese queden eliminadas desde el principio.10
3.2.1.1 Muestreo Espacial.
El muestreo espacial también cae dentro del ámbito del teorema de muestreo, pues los
geófonos conforman un arreglo y los intervalos de grupo dentro de una línea están tan
regularmente espaciados. Un arreglo, en el sentido sísmico, es un grupo de geófonos cuya salida
es sumada en la “sarta” o posteriormente en procesamiento. El propósito de los arreglos es la
atenuación de ruidos, en particular, el ruido generado por la fuente.
Siendo V la velocidad para la capa cercana a la superficie (near surface layer or weathered
layer). El teorema de muestreo es modificado en términos de distancia o porción de longitud de la
onda.
, donde por lo que: Ec. 10
Donde Smin es la separación mínima entre geófonos.
Disminuyendo la velocidad de la onda, tiene el mismo efecto que incrementar la frecuencia.
Incrementando la velocidad, la distancia entre geófonos crecerá. Para velocidades bajas,
disminuirá la distancia mínima de separación entre geófonos. Los elementos del arreglo, sin
embargo, son sumados en la sarta de geófonos, lo cual hace del arreglo por sí mismo un filtro
convencional, más que precisamente un filtro de muestreo.

31
El punto es que el teorema de muestreo es la base para ese primer muestreo de la tierra en un
reconocimiento sísmico (survey) en la forma de un arreglo regularmente espaciado de geófonos.
Para ruidos coherentes el tamaño, espaciamiento y orientación del arreglo deben ser
seleccionados sobre la base de las propiedades del ruido a ser cancelado.
3.2.1.2 Intervalo de Grupo.
El intervalo de grupo es la distancia en superficie entre estaciones receptoras, los parámetros del
horizonte objetivo son usados para calcular el intervalo de grupo.
La señal sísmica reflejada en una capa del subsuelo, produce “puntos de reflexión” o muestreo
en subsuelo separados una distancia que es la mitad del intervalo de grupo. Estructuras más
pequeñas que la del intervalo de grupo (intervalo de estaciones receptoras) no pueden ser
distinguidas individualmente sobre el sismograma. Para capas planas, no hay problemas de
aliassing. Cuando el horizonte es buzante, la data debe ser migrada, desde la aparente ubicación
hasta la verdadera ubicación en subsuelo.
La ecuación utilizada en un diseño 2D (Ec. 11) para determinar este parámetro de adquisición
tiene como variables la velocidad, frecuencia y ángulo de buzamiento de dicha capa y el
resultado obtenido con esta ecuación da la distancia más grandes entre estaciones receptoras que
se podrá usar sin que ocurra aliassing durante la migración. Es importante destacar ciertas
conclusiones que permite hacer la ecuación mencionada anteriormente: conforme el ángulo de
buzamiento se incrementa, el intervalo de grupo se hace más pequeño; a mayor velocidad, mayor
la distancia del intervalo de grupo; a mayor frecuencia disminuye la distancia del intervalo. 5
Gmax = Ec. 11
Donde = ángulo de inclinación del reflector respecto a la horizontal.

32
Gmax = intervalo de estacas o intervalo de grupo.
V = Velocidad mínima de la capa objetivo (target layer).
fm = Frecuencia máxima esperada.
3.2.2. Arreglo de Geófonos.
Un arreglo es un patrón de sensores (geófonos) que reciben una señal. Para aplicaciones
sísmicas, el arreglo suma las señales desde un patrón de geófonos. El propósito del muestreo y de
la suma de las señales captadas por el grupo de geófonos es la atenuación del ruido generado por
la fuente y provenientes de fuera de la línea mientras se preserva, tanto como sea posible, la señal
de interés sísmico.
El diseño de los arreglos es un delicado balance entre la relación señal/ruido (S/N) y la
resolución. El compromiso entre resolución de la data sísmica es una tarea constante en un diseño
sísmico. Desde que el arreglo es sumado en el campo, es muy difícil modificar la respuesta del
arreglo sobre la data grabada.5
Los arreglos, además de atenuar los ruidos coherentes, tales como ground roll, también
modifican el ruido aleatorio (random noise). El ruido aleatorio es atenuado por la raíz cuadrada
del número de geófonos que están siendo sumadas en el arreglo. Experimentos muestran que la
relación señal/ruido (S/N) mejoran suavemente con el número de geófonos, pero también está
influenciado por la longitud de onda del ruido y el espaciamiento de los geófonos.5
Existen algoritmos que permiten estimar el factor S/N, pero pruebas de campo son la mejor
manera para determinar este importante parámetro de diseño. Cuando la data ya está sumada por
el arreglo, es muy difícil recuperar la pérdida de la resolución. Por esto, sería mejor visto errar
por el lado de arreglos cortos que por el lado de los arreglos que son más grandes que los
necesarios.5
33
Relación Señal / Ruido (S/N). Para evaluar cuantitativamente el ruido lo que normalmente se
hace es medir su intensidad respecto de la señal que interfiere. En otras palabras, lo que en la
práctica importa es la relación entre la intensidad de la señal, S, y la intensidad del ruido
interferente, R, factor comúnmente conocido como relación señal-ruido, S/N, expresada en
decibeles, S/N = 20 log (S/N).5
El límite inferior de S/N para identificación de la señal es cero decibeles o relación 1/1
(Intensidad de la señal igual a intensidad del ruido). Para valores de S/N negativos (menores que
1/1 o menores que cero db) la señal no es identificable por el ojo humano. La calidad de la
reflexión vista por el ojo humano se incrementa con el valor de S/N hasta alcanzar un umbral
(S/N = 10 db o relación 3/1). Por arriba de este umbral un aumento en la relación S/N no produce
efectos visibles en la mejoría de la calidad de un evento reflejado.5
Durante el procesado de los datos sísmicos se logra un aumento sustancial de la relación senal-
ruido. El principal contribuyente para el aumento de la relación S/N es la suma de trazas de punto
profundo común o stacking.
Los parámetros de los arreglos son: el espaciamiento de los elementos (geófonos), la longitud
total del arreglo. El diseño de arreglos requiere el conocimiento de la longitud de onda de la señal
y el ruido. Para encontrar la longitud de onda se requiere de la velocidad de la capa cercana a la
superficie y las frecuencias esperadas.
Para definir un arreglo y su tamaño, son necesarias algunas pruebas de campo. Si no se realizan
pruebas de ruido en campo antes de la grabación puede ocasionar grandes problemas durante el
procesamiento de datos, debido al uso de un arreglo impropio o inefectivo. El ruido que se
necesita suprimir en el campo puede provenir de un número diferente de fuentes, incluyendo
ondas directas, ondas de aire, ground roll, ondas de cizalla, ondas refractadas, múltiples, ruidos
aleatorios.
34
Una simple prueba de campo puede determinar las longitudes de ondas o tipos de señales no
deseadas. La técnica es llamada “noise spread” o “walkaway survey” y consiste en fijar el arreglo
de geófonos en posición y realizar varios disparos (patrones de carga y profundidad) a diversas
distancias del arreglo. El producto final es un registro sísmico en la que se puede evaluar las
ondas de interferencias que arriban desde fuera de la línea. El resto del tren de ondas puede ser
atacado con patrones de fuentes o arreglo de receptores. Otro método conocido como “expanding
profile” produce también como resultado un registro similar al “noise spread” y sirve también
para analizar ruidos, en este caso, la fuente de disparos es fija y los geófonos se mueven
sucesivamente a distancias mayores. 5
Ambos tipos de registro suministran la información necesaria para diseñar el arreglo. Para
ondas lineales la velocidad se obtiene aplicando la fórmula tiempo-distancia de los datos que se
obtienen del registro. La frecuencia usualmente es estimada midiendo el tiempo pico-a-pico de
las ondas y el número de ondas involucradas en esta medición. Luego de conocidos la frecuencia
y velocidad, aplicando fórmulas, obtendremos la longitud de onda y la frecuencia espacial.
Las frecuencias bajas pueden ser suprimidas simplemente con filtros pasa banda en el dominio
del tiempo o con filtros de corte bajo que se aplican durante el procesamiento de la data. La
desventaja con los filtros de corte bajo es que las bajas frecuencias son útiles si la inversión es
parte de la interpretación.5
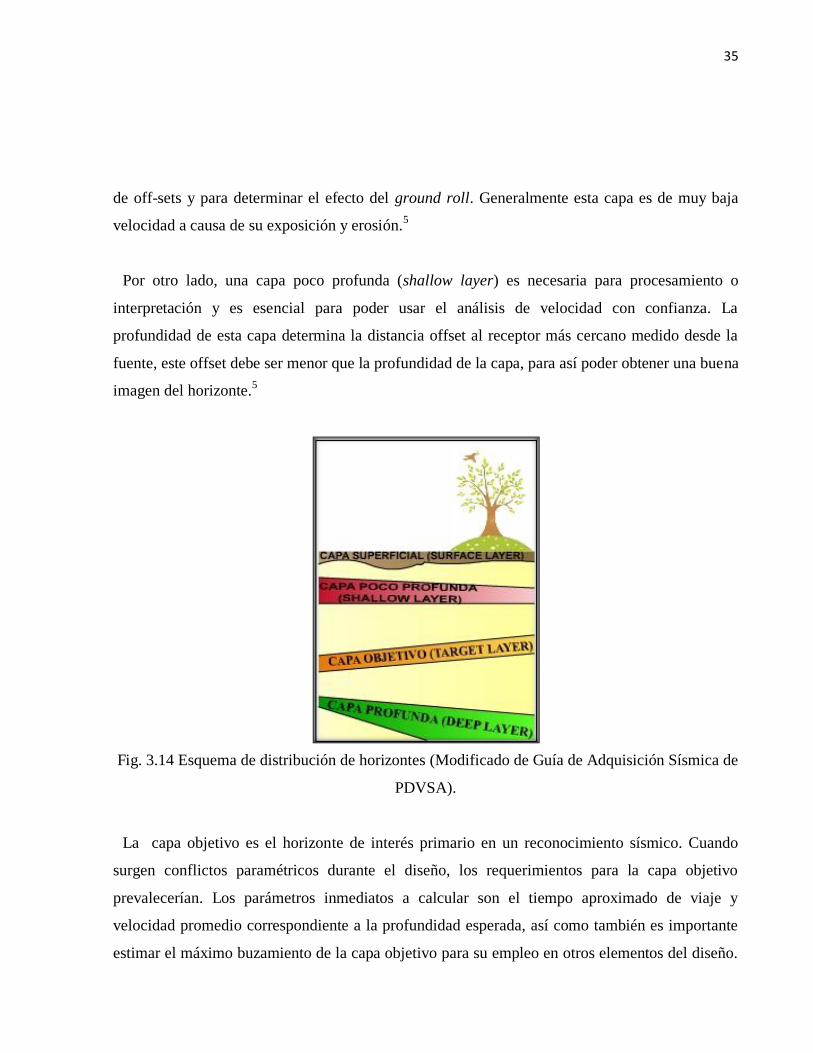
3.2.3 Definición de Horizontes.
Tres son los horizontes sismográficos a considerarse cuando se inicia el diseño para un proyecto
de reconocimiento sísmico: una capa poco profunda o shallow layer, la capa objetivo o target
layer, y una capa profunda o deep layer. Cada uno es importante de una manera diferente.
La capa superficial o meteorizada es un parámetro que se usa en diversos cálculos y puede
influir en el diseño. La velocidad de la capa superficial es utilizada como un factor en el cómputo
35
de off-sets y para determinar el efecto del ground roll. Generalmente esta capa es de muy baja
velocidad a causa de su exposición y erosión.5
Por otro lado, una capa poco profunda (shallow layer) es necesaria para procesamiento o
interpretación y es esencial para poder usar el análisis de velocidad con confianza. La
profundidad de esta capa determina la distancia offset al receptor más cercano medido desde la
fuente, este offset debe ser menor que la profundidad de la capa, para así poder obtener una buena
imagen del horizonte.5
Fig. 3.14 Esquema de distribución de horizontes (Modificado de Guía de Adquisición Sísmica de
PDVSA).
La capa objetivo es el horizonte de interés primario en un reconocimiento sísmico. Cuando
surgen conflictos paramétricos durante el diseño, los requerimientos para la capa objetivo
prevalecerían. Los parámetros inmediatos a calcular son el tiempo aproximado de viaje y
velocidad promedio correspondiente a la profundidad esperada, así como también es importante
estimar el máximo buzamiento de la capa objetivo para su empleo en otros elementos del diseño.
36
Para obtener la máxima o más grande distancia offset (máxima distancia fuente-receptor) se hace
esta distancia un poco mayor que la profundidad de la capa objetivo.
Puede existir un horizonte más profundo que la capa objetivo, el cual es importante para
interpretación, tanto como los horizontes poco profundos, además ésta capa influirá en la longitud
del registro, potencia de las fuentes, filtros instrumentales y el máximo offset.5
3.2.4 Offset máximo y Apertura de Migración.
Con el offset más cercano y el intervalo de grupo definidos, resta establecer el offset máximo
para las estaciones receptoras. El offset lejano que se requiere podría ser calculado primero para
el horizonte objetivo (target layer) y luego por el horizonte profundo (deep horizon). La
velocidad de la capa superficial o capa meteorizada (weathered layer) está involucrada debido a
la inicial influencia angular sobre la trayectoria de la onda a través de la tierra y la profundidad
del horizonte que está siendo evaluado5.
Ec. 12
Donde Xmax = Offset máximo para las estaciones receptoras que asegura la obtención de
una imagen del horizonte de interés.
Z = Profundidad del horizonte.
Vs = Velocidad superficial (de la capa superficial o meteorizada).
V = Velocidad promedio de la capa objetivo (target layer).
Observe que a mayor velocidad promedio de la capa objetivo y a mayor profundidad, se
incrementa el offset máximo requerido para obtener una imagen del horizonte de interés. Si el
horizonte tiene un ángulo de buzamiento con respecto a la horizontal igual a , entonces la

37
distancia, Xmax, podría extenderse como una función del buzamiento mediante la siguiente
fórmula:
Ec. 13
El ó Apertura de Migración asegura que los eventos migrados de importantes reflectores
permanezcan sobre el sismograma. La longitud del spread necesita ser un poco mayor que la
profundidad del reflector que se quiere quede reflejado en la sección sísmica. 5
El objetivo de la migración es desplazar los puntos de reflexión a la verdadera posición
espacial, Como resultado de este proceso los buzamientos de los horizontes se incrementan,
ciertas figuras estructurales se definen apropiadamente (caso de los sinclinales, las difracciones se
colapsan, etc.). 9
En conclusión para determinar los límites de un levantamiento sísmico es necesario tener en
cuenta 3 áreas muy importantes para poder obtener una imagen de excelente calidad de la
estructura deseada. La primera área (cuadro color azul en la Figura 3.15) es definida durante la
interpretación y corresponde al área de interés, que se desea iluminar y que debe ser migrada,
llamada o la llamada subsurface fully-migrated area. 9
La segunda área es la zona de apertura de migración (cuadro color rojo en la Figura 3.15), la
apertura de migración está calculada como una extensión a la superficie de cobertura para tener
fuentes y/o receptores a suficientes distancias offset para tomar en cuenta las trayectorias de los
rayos de las estructuras con fuertes buzamientos. Toda esta área al igual que la anterior son zonas
que tienen un completa cobertura nominal.9

38
La tercera área está definida en función de los objetivos operacionales, y es el área de fold taper,
la que va a permitir satisfacer las necesidades de cobertura de las dos áreas anteriores (cuadro
color verde en la Figura 3.15).8
Fig. 3.15 Áreas de un levantamiento sísmico 3D. (Modificado de Chaouch et. al , 2006)
3.2.5 Atributos de un diseño sísmico.
Un diseño sísmico no está completo mientras no se haya realizado un análisis de los atributos.
Los atributos únicamente pueden ser analizados al detalle con los softwares de las computadoras.
El efecto de los obstáculos sobre el diseño no puede ser valorado a mano o por observación. Los
obstáculos deberían ser definidos antes que se realice el análisis para incluir los efectos de
39
estaciones fuentes o receptoras que se van a perder u omitir. Los atributos estándares analizados
para cada bin son:
Bin display. Muestra los bines que contienen al menos un punto medio geométrico. Algunos de
estos puntos pueden caer cerca al centro y otros próximos a los bordes del bin.5
Análisis de Cobertura. El área de interés (zona en el subsuelo que se desea muestrear) debe
tener una buena relación S/N de forma que al procesar los datos se obtengan buenas secciones
sísmicas para la interpretación. La cobertura debe ser entonces máxima con el fin de que el
análisis de velocidad sea consistente en la precisión de estimación de velocidades en todo el
área.9 Por lo tanto la máxima cobertura de fold estará cerca del centro del proyecto, cayendo a
valores unitarios en las esquinas, mientras que a lo largo de los bordes del proyecto tendrá valores
de 2 o 3.
Distribución de offsets. Cada CMP bin contiene diversas trazas provenientes de diferentes pares
de fuente-receptor, donde cada par posee una distancia fuente- receptor (offset) y un azimuth
(ángulo entre una línea imaginaria paralela al norte franco y un línea imaginaria que va desde la
fuente al receptor, este ángulo se mide desde el centro del bin) que lo caracteriza e identifica. En
diseño sísmico 3D es muy importante tener en cuenta tanto el azimuth como el offset. La
distribución de offset está directamente relacionada con la cobertura; bajos valores de cobertura
generan una pobre distribución de offset, mientras que altos valores de cobertura aumenta la
distribución de los mismos. La distribución de offset más efectiva debe contener trazas
provenientes de offsets tanto cercanos como lejanos, lo cual facilitará los cálculos de velocidad
para las correcciones NMO, así como también permitirá obtener el mejor resultado del apilado.
Una distribución poco equilibrada de offsets (desproporción en la cantidad de offsets lejanos con
respecto a los cercanos, o viceversa) puede causar aliassing de los elementos buzantes, puede ser
“fuente” generadora de ruido e incluso puede originar reflexiones primarias inexistentes (ver
Figura 3.16).8

40
Fig. 3.16 Distribución de offset y azimuth para un CMP bin. Las líneas negras con distribución
radial implican una distribución de offset efectiva, ya que contiene trazas provenientes de offsets
tanto cercanos como lejanos.8
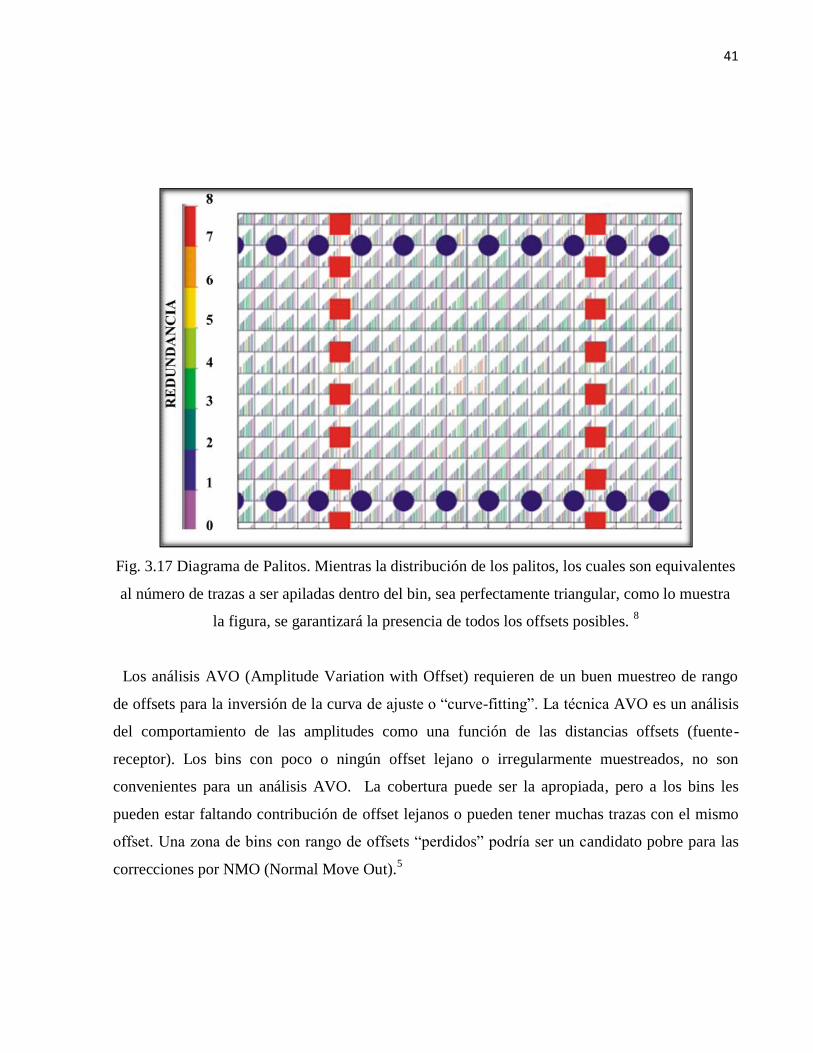
Existen diferentes diagramas que permiten analizar la distribución de offset dentro un bin, sin
embargo es más importante analizar la distribución de offset dentro de un conjunto de bines o
superbin, ya que los procesos de migración y NMO se realizan sobre un grupo de bines. Entre los
diagramas que permiten realizar estos análisis se encuentra el diagrama de palitos o “stick
diagram”. La Figura 3.17 ilustra este tipo de representación, en la cual cada cuadro representa un
CMP bin y el número de palitos dentro del mismo es igual al número de trazas a ser apiladas. La
escala vertical de cada cuadro indica la cantidad de offset, y el eje horizontal la posición de la
traza dentro de una escala de offset. Una distribución perfectamente triangular indicará la
presencia de todos los offsets posibles. Si dos o más trazas tienes el mismo offset, el palito será
dibujado con un color diferente para indicar redundancia.8
41
Fig. 3.17 Diagrama de Palitos. Mientras la distribución de los palitos, los cuales son equivalentes
al número de trazas a ser apiladas dentro del bin, sea perfectamente triangular, como lo muestra
la figura, se garantizará la presencia de todos los offsets posibles. 8
Los análisis AVO (Amplitude Variation with Offset) requieren de un buen muestreo de rango
de offsets para la inversión de la curva de ajuste o “curve-fitting”. La técnica AVO es un análisis
del comportamiento de las amplitudes como una función de las distancias offsets (fuente-
receptor). Los bins con poco o ningún offset lejano o irregularmente muestreados, no son
convenientes para un análisis AVO. La cobertura puede ser la apropiada, pero a los bins les
pueden estar faltando contribución de offset lejanos o pueden tener muchas trazas con el mismo
offset. Una zona de bins con rango de offsets “perdidos” podría ser un candidato pobre para las
correcciones por NMO (Normal Move Out).5

42
Las trazas cercanas representan la mejor aproximación al offset cero para la conversión a
profundidad. Las trazas del medio o centrales conectan las trazas cercanas y lejanas definiendo la
hipérbola del moveout.
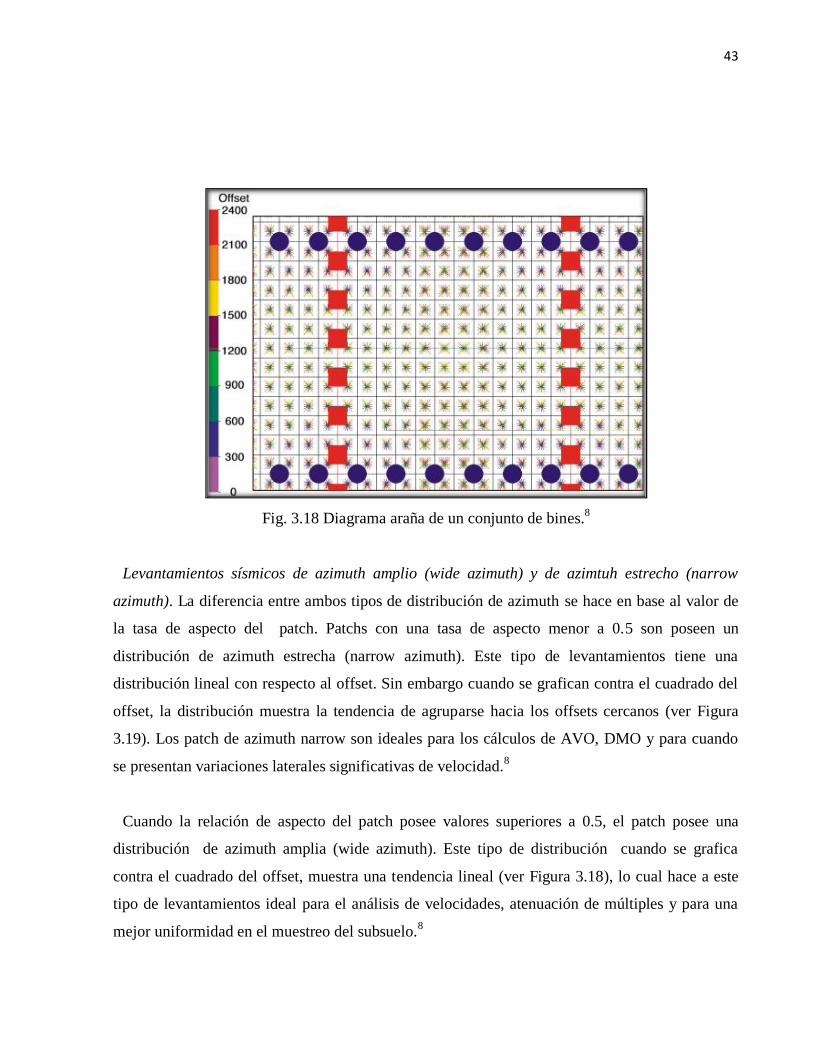
Distribución azimuthal. Cuando existen estructuras buzantes en el subsuelo la velocidad se hace
dependiente de la dirección de propagación. En este caso el análisis de velocidades de hacerse de
forma azimuthal. El análisis azimuthal se hace de acuerdo al valor que se obtiene de la tasa de
aspecto, la cual se define como el cociente entre la dirección cross-line y la dirección in-line del
patch. Si la relación de aspecto se encuentra en 0.6 y1.0 se obtiene una buena distribución de
azimuth, lo que garantiza que la información de todos los ángulos que rodean el bin son incluidos
en el apilado. Una manera de representar la distribución de azimutal es a través de los llamados
diagramas de araña (Figura 3.18), el cual permite visualizar el azimuth de cada traza
perteneciente a un CMP bin. Cada pata de la araña (tanto el tamaño como el color) indica la
distancia de offsets y apunta en dirección de la fuente al receptor. La pata de la araña siempre
comienza en el centro del bin y no necesariamente en el punto medio entre la fuente y el receptor
al cual pertenece. La longitud de las patas de la araña se escala de forma que el offset máximo del
diseño sea igual a la mitad de la altura del bin.8
43
Fig. 3.18 Diagrama araña de un conjunto de bines.8
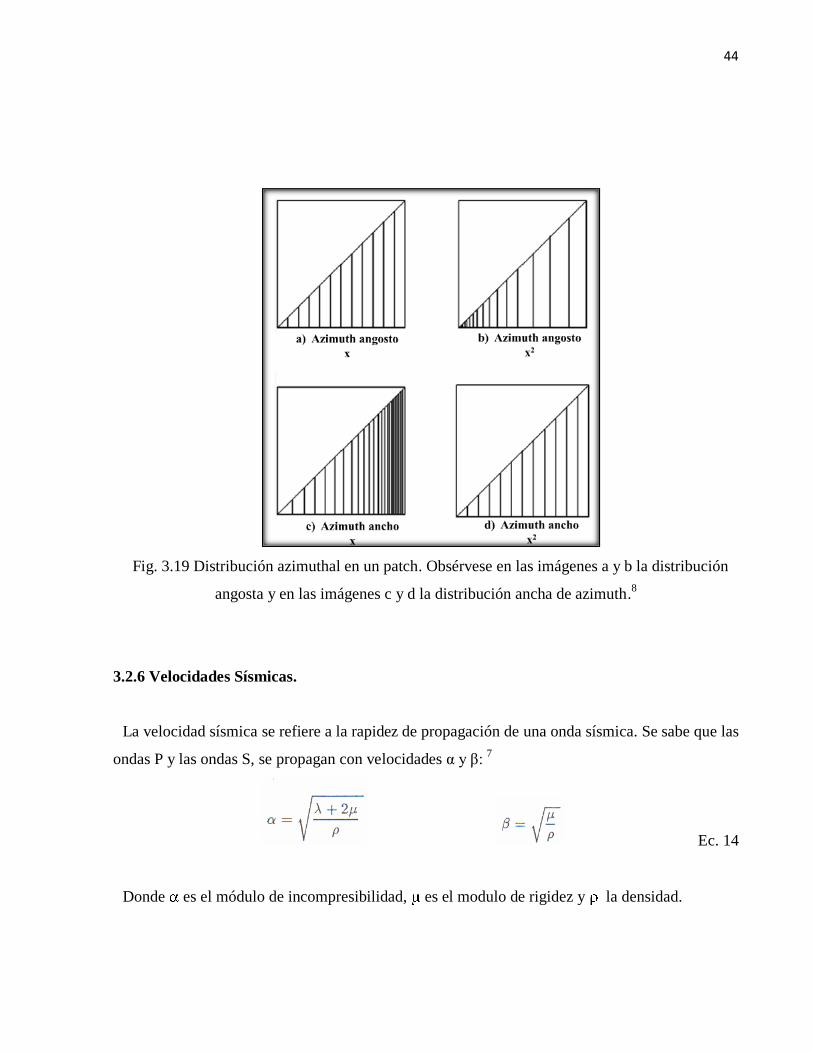
Levantamientos sísmicos de azimuth amplio (wide azimuth) y de azimtuh estrecho (narrow
azimuth). La diferencia entre ambos tipos de distribución de azimuth se hace en base al valor de
la tasa de aspecto del patch. Patchs con una tasa de aspecto menor a 0.5 son poseen un
distribución de azimuth estrecha (narrow azimuth). Este tipo de levantamientos tiene una
distribución lineal con respecto al offset. Sin embargo cuando se grafican contra el cuadrado del
offset, la distribución muestra la tendencia de agruparse hacia los offsets cercanos (ver Figura
3.19). Los patch de azimuth narrow son ideales para los cálculos de AVO, DMO y para cuando
se presentan variaciones laterales significativas de velocidad.8
Cuando la relación de aspecto del patch posee valores superiores a 0.5, el patch posee una
distribución de azimuth amplia (wide azimuth). Este tipo de distribución cuando se grafica
contra el cuadrado del offset, muestra una tendencia lineal (ver Figura 3.18), lo cual hace a este
tipo de levantamientos ideal para el análisis de velocidades, atenuación de múltiples y para una
mejor uniformidad en el muestreo del subsuelo.8
44
Fig. 3.19 Distribución azimuthal en un patch. Obsérvese en las imágenes a y b la distribución
angosta y en las imágenes c y d la distribución ancha de azimuth.8
3.2.6 Velocidades Sísmicas.
La velocidad sísmica se refiere a la rapidez de propagación de una onda sísmica. Se sabe que las
ondas P y las ondas S, se propagan con velocidades α y β: 7
Ec. 14
Donde es el módulo de incompresibilidad, es el modulo de rigidez y la densidad.
45
Pero estas velocidades requieren de materiales puros, por tanto se tiene que los minerales puros
como el cuarzo, calcita, entre otros poseen velocidades de propagación únicas, lo cual no ocurre
así en los estratos que se encuentran dispuestos en el subsuelo, debido a que estas rocas son
producto de la combinación de diversos minerales.7
Por tanto en adquisición sísmica cuando se habla de velocidad se asocia dicha palabra a
cantidades, cuyas unidades son distancia/tiempo, y que correspondes a algún tipo de velocidad
promedio-aparente. De esta forma es usual encontrarse con los siguientes tipos de velocidades:
.- Velocidad Intrínseca (V): es una propiedad física de materiales puros, como lo son la
densidad, la permeabilidad y la porosidad.8
.- Velocidad Interválica (Vint): se refiere a la velocidad de propagación promedio dentro de un
medio o formación dada, y es la que muchos intérpretes asocian con la litología. Su medición se
realiza utilizando el registro sónico.7 Una aproximación de la velocidad interválica viene dada por
la ecuación de Dix (Ec. 15), la cual asume la presencia de reflectores horizontales paralelos.5
Ec. 15
Donde el subíndice n-1 corresponde al reflector superior del intervalo y n al reflector inferior; la
variable V corresponde a la velocidad cuadrática media y t es el tiempo de arribo a incidencia
normal.5
.- Velocidad Promedio (Vpr): se refiere a la velocidad asociada a más de una formación o
litología, generalmente está definida por el promedio de las velocidades interválicas medido
desde la superficie. Esta velocidad se obtiene directamente de los “tiros de verificación” ó “check
shots”, y es la velocidad que se utiliza para llevar los tiempos de reflexión a profundidad. Se
puede representar a través de la siguiente ecuación: 7
46
Ec. 16
.- Velocidad de Apilamiento (Vnmo): velocidad que se obtiene durante el proceso de corrección
por sobre corrimiento hiperbólico (NMO) en las trazas de reflexión.7
.- Velocidad RMS (Vrms): es una velocidad puramente matemática, la cual es obtenida a partir
de un promedio pesado de los cuadrados de las velocidades interválicas, y tiene aplicación
cuando se de estimar velocidades promedio a partir de las velocidades del procesamiento
(Vnmo). Esta velocidad se puede expresar de la siguiente manera: 6
Ec.17
3.2.7 Trazado de Rayos.
La técnica de trazado de rayos es muy útil para definir un diseño de adquisición a fin de
iluminar los estratos y sobre todo cuando las capas en el subsuelo tienen a un modelo tectono-
estratigráfico complicado, por ejemplo domos de sal, fallas, discontinuidades laterales de
velocidad, entre otros. Esta técnica es aplicada a diseños de adquisición 3D y 2D a fin de
incrementar o reducir el espaciamiento entre receptores y fuentes en ciertas áreas del
levantamiento de manera de asegurar total cobertura en zonas estructuralmente complejas,
además que permite evaluar el impacto de la variación de cobertura y distribución de offset y
azimuth sobre el horizonte de interés8. Sofisticados programas de computadora, como por
ejemplo el software MESA, permiten llevar a cabo esta útil herramienta.