comparison of noaa’s operational avhrr derived cloud...
TRANSCRIPT

Comparison of NOAA's Operational AVHRR DerivedCloud Amount to other Satellite Derived Cloud
Climatologies.
Sarah M. Thomas University of Wisconsin, Cooperative Institute for Meteorological Satellite
Studies (CIMSS)
Andrew K. HeidingerNOAA/NESDIS Office of Research and Applications
Michael J. PavolonisUniversity of Wisconsin, Cooperative Institute for Meteorological Satellite
Studies (CIMSS)
Submitted to: Journal of Climate
Date Submitted: 11/05/2003
Date Revised: 05/04/2004
Date Accepted:

Abstract
A comparison is made between a new operational NOAA AVHRR global cloud
amount product to those from established satellite-derived cloud climatologies. The new
operational NOAA AVHRR cloud amount is derived using the cloud detection scheme in the
extended Clouds from AVHRR (CLAVR-x) system. The cloud mask within CLAVR-x is a
replacement for the CLAVR-1 cloud mask. Previous analysis of the CLAVR-1 cloud
climatologies reveals that its utility for climate studies is reduced by poor high latitude
performance and inability to include data from the morning orbiting satellites. This study
demonstrates, through comparison with established satellite-derived cloud climatologies, the
ability of CLAVR-x to overcome the two main shortcomings of the CLAVR-1 derived cloud
climatologies. While systematic differences remain in the cloud amounts from CLAVR-x and
other climatologies, no evidence is seen that these differences represent a failure of the CLAVR-
x cloud detection scheme. Comparisons for July 1995 and January 1996 indicate that for most
latitude zones, CLAVR-x produces less cloud than ISCCP and UW/HIRS. Comparisons to
MODIS for April 1-8, 2003 also reveal that CLAVR-x tends to produce less cloud. Comparison
of the seasonal cycle (July-January) of cloud difference with ISCCP, however, indicates close
agreement. It is argued that these differences may be due to the methodology used to construct a
cloud amount from the individual pixel level cloud detection results. Overall, the global cloud
amounts from CLAVR-x appear to be an improvement over those from CLAVR-1 and compare
well to those from established satellite cloud climatologies. The CLAVR-x cloud detection
results have been operational since late 2003, and are available in real-time from NOAA.
1

1. Introduction
Cloud radiative effects play a central role in the Earth's climate system (Liou 1986;
Ramanathan et al. 1989; Rossow and Lacis 1990; Stephens and Greenwald 1991) . Cloud cover
is a key factor in determining the magnitude of the exchange of incoming solar energy and
outgoing terrestrial energy (Pavolonis and Key, 2003); an exchange that is central to
understanding the natural fluctuations in the Earth's climate system. Hence, an accurate
determination of the global extent of cloud cover is imperative for studies of the Earth's climate.
As satellite imagers continue to become more advanced, there are an increasing number of
opportunities to study the Earth's atmospheric, biological, and geophysical processes, as well as
land and ocean surface properties in great detail. However, many of these studies, such as
retrievals of aerosol optical properties and surface temperature, or studies of snow and sea ice
extent, rely on clear sky radiances in the data reduction process. Even small amounts of cloud
contamination in a scene can dramatically change the radiative properties derived using satellite
measurements.
Although cloud amount is a fundamental quantity, satellite derived estimates of it
vary significantly. Trends in cloud amount from a variety of studies have even shown regional
trends of differing sign. For example, the decrease in tropical cloud amount evident in the
ISCCP (International Satellite Cloud Climatology Project) products during the 1990s (Wielicki
et al., 2002) is not present in the UW-HIRS (University of Wisconsin High resolution Infrared
Radiation Sounder) cloud climatology (Wylie and Menzel, 1999). For these reasons, a great deal
of effort has been focused on developing algorithms that use satellite radiometric data in a
2

temporally consistent manner to detect clouds accurately on a global scale.
One instrument that provides data useful for these types of studies is the National
Oceanic and Atmospheric Administration (NOAA) Advanced Very High Resolution Radiometer
(AVHRR). The purpose of this study is to examine the performance of the extended Clouds
from AVHRR (CLAVR-x) cloud detection algorithm over a range of seasonal conditions and
satellite equator crossing times. This will be accomplished through comparisons with cloud
amounts from ISCCP, Clouds from AVHRR phase 1 (CLAVR-1), Moderate resolution Imaging
Spectroradiometer (MODIS), AVHRR Polar Pathfinder (APP), and UW-HIRS. Characteristics
of the global cloud distribution from CLAVR-x relative to other cloud products will be
presented. Of primary importance is the question of whether or not CLAVR-x provides results
that are consistent with other estimates of the global cloud distribution, while offering
improvements over previous cloud detection algorithms that use AVHRR data.
A detailed description of each of the cloud detection algorithms used for
comparison is given in section 2. In section 3, global cloud amounts from CLAVR-x are
compared to the results from the other aforementioned cloud climatologies. Several examples
are given that highlight the key similarities and differences between CLAVR-x and each of the
other products, for a variety of satellite equator crossing times and seasonal conditions. Potential
strengths and/or shortcomings of CLAVR-x are discussed in this section. Section 4 summarizes
the results from this study.
3

2. Overview of Cloud Amount Algorithms
Satellite imagers have the ability to assess global cloud properties on much finer
spatial and temporal scales than any other type of instrument currently available. Hence, many
efforts have been made over the past 25 years to develop accurate methods by which data from
satellite imagers may be used not only to detect clouds, but also to document the global extent of
cloud occurrence and properties.
a. ISCCP Cloud Amount Algorithm
One of the first large scale, organized attempts to use satellite data to create a global
cloud climatology was ISCCP, which was established in 1982. An overview of the ISCCP
program is given by Schiffer and Rossow (1983). Radiance data from geostationary satellites
such as GOES (Geostationary Operational Environmental Satellite), METEOSAT (geostationary
Meteorological Satellite), and GMS (Geostationary Meteorological Satellite) are averaged over 3
hr intervals to provide complete coverage of the tropics and mid-latitudes at a high temporal
resolution. Global coverage is attained by using AVHRR data from a suite of NOAA polar-
orbiting satellites to provide measurements poleward of 60 N/S. ISCCP pixels are mapped to a
250 km equal area grid, and as described by Schiffer and Rossow (1983), variations over this
area are small compared to time variations. The ISCCP data record spans from 1983-2002, and
is the longest and most complete satellite derived cloud climatology currently available.
A complete description of the ISCCP cloud amount algorithm is given by Rossow
and Garder (1993). ISCCP clear/cloudy classification is based largely on the analysis of spatial
and temporal variability in reflectance and/or brightness temperature (BT) over a geographically
4

small region. These uniformity tests are based on the assertion that clear pixels tend to exhibit
less variability in both space and time than do cloudy pixels (McClain et al. 1985). For a pixel to
be classified as cloudy, it must have a BT much colder than the warmest pixel in a small spatial
domain. In addition, the pixel must exhibit significant variability in BT over a period of 3
consecutive days. A pixel is classified as cloudy only if it meets both the spatial and temporal
variability requirements. In addition, clear sky statistics are compiled once every 5 days using
both IR and VIS data. These statistics are used to enhance the cloud mask by providing
additional threshold values by which pixels may be classified as clear or cloudy (e.g. A pixel is
cloudy if it is colder than the 5-day statistical mean clear-sky BT, or has a higher VIS reflectance
than the statistical mean clear-sky reflectance.) After all pixels have been classified, total cloud
fraction is calculated for each 250 km grid cell by taking the ratio of the number of cloudy pixels
to the total number of pixels. This calculation carries the assumption that there are no partially
cloud filled pixels, and every cloudy pixel is 100% cloud covered.
b. CLAVR-1 Cloud Amount Algorithm
The ISCCP cloud amount algorithm uses IR and VIS data from AVHRR in order to
attain measurements over polar regions and achieve global coverage. However, AVHRR has
cloud detection capabilities beyond the two channel methods used by ISCCP. Utilization of all
the spectral information provided by AVHRR was one motivating factor for the development of
an AVHRR-only cloud mask by NOAA, and resulted in the creation of the CLAVR-1 cloud
mask (Stowe et al., 1999). AVHRR data from satellites prior to NOAA-15 provide radiances
over 5 wavelength bands with central wavelengths of 0.63, 0.86, 3.75, 10.8, and 12 µm.
5

AVHRR data from after the launch of NOAA-15 provide observations over an additional band
with a central wavelength of 1.6 µm, however cannot simultaneously provide observations from
the 3.75 µm channel. AVHRR has a spatial resolution of 1 km, but these data are available over
limited areas. The Global Area Coverage (GAC) AVHRR data are used for this study, and have
a spatial resolution of 4 km at nadir. The traditional 5 channel AVHRR data record encompasses
over 23 years of data (1981-2004). The AVHRR data record is scheduled to continue until 2018,
through the European organization for the exploitation of meteorological satellites
(EUMETSAT) polar-orbiting operational meteorological satellites (MetOp) program. This gives
AVHRR the potential to be very valuable for use in climate studies, including studies of global
cloud distribution and physical properties.
The CLAVR-1 cloud detection algorithm is a pixel level cloud mask that uses all of
the spectral information that AVHRR provides. It was developed for use in multiple NESDIS
(National Environmental Satellite Data and Information Service) products, and its heritage lies in
the NESDIS operational sea surface temperature algorithm (McClain, 1989). A detailed
description of the CLAVR-1 cloud mask is provided by Stowe et al. (1999). CLAVR-1
implements three primary types of tests in order to determine whether a pixel is clear or cloudy:
contrast signature tests, spectral signature tests, and spatial signature tests. The contrast
signature tests require that for each pixel, the reflectance or BT for a single AVHRR band be
compared against a fixed threshold value that separates clear and cloudy conditions. The
threshold used for each test is adjusted based on the surface type (e.g. vegetated land, ocean,
desert... etc.) of the scene. The spectral signature tests involve the combination of multiple
6

AVHRR bands. These tests compare either the ratio or difference of two bands against a
clear/cloudy threshold value. Finally, a spatial uniformity test is implemented. Similar to
ISCCP, this test operates on the assumption that over small spatial areas (in the case of CLAVR-
1, a 2x2 pixel array), cloud free scenes are relatively uniform in their reflectance and BT. Based
on the results of the aforementioned tests, a pixel is classified into one of three categories: clear,
mixed, or cloudy. Cloud fraction, f(c), is calculated based on the assumption that cloudy scenes
are 100% cloudy, mixed scenes are 50% cloudy, and clear scenes are 0% cloudy, using the
following expression:
(1) f(c) = Ncloudy + 0.5*Nmixed
Ntotal
Where Ncloudy is the number of cloudy pixels, Nmixed is the number of mixed pixels, and Ntotal is the
total number of pixels in the scene.
c. CLAVR-x Cloud Amount Algorithm
Further development of CLAVR-1 has led to the extended CLAVR algorithm
(CLAVR-x). CLAVR-x became an operational product in late 2003, and the CLAVR-x cloud
detection results are currently available in the space alloted in the NOAA AVHRR 1b format.
CLAVR-x is based on the same physical principles as CLAVR-1. However, numerous updates
have been made in order to improve upon some of the documented shortcomings of CLAVR-1.
An algorithm theoretical basis document (ATBD) is available on-line for CLAVR-x, which fully
describes the cloud amount algorithm (Heidinger, 2004). In addition, parts of the CLAVR-x
cloud mask are described by Heidinger et al. 2002, and Heidinger et al. 2004. One of the major
7

improvements of CLAVR-x over CLAVR-1 is the breakdown of the mixed category into two
new categories: mixed-cloudy and mixed-clear. Mixed cloudy pixels are those pixels that are
determined to be cloudy by one or more of the contrast or spectral signature tests, but are
spatially non-uniform as determined by uniformity tests. Likewise, mixed-clear pixels are those
pixels that are determined to be clear but are spatially non-uniform . The mixed category is
divided into two sub-categories to improve the accuracy of the total cloud fraction calculation by
allowing more realistic percent cloud cover values be assigned to mixed pixels. CLAVR-x cloud
fraction is calculated based on the assumption that cloudy scenes are 100% cloudy, mixed-
cloudy scenes are 88% cloudy, mixed-clear scenes are 13% cloudy, and clear scenes are 0%
cloudy. These percentages are derived by analyzing the mean radiances from grid-cells that
report both clear and cloudy pixels. A radiometric balance approach similar to the one described
in Molnar and Coakley (1985) is used to estimate the cloud fraction of the partly clear and the
partly cloudy pixels. This approach calculates the radiance for a partly clear/cloudy pixel
assuming that it is a linear function of the fully cloudy and fully clear radiances. Cloud fraction
is then derived using the following expression:
(2) f(c) = Imixed-cloudy-Iclear Icloudy-Iclear
Where Imixed-cloudy is the mixed-cloudy radiance, Icloudy is the fully cloudy radiance, and Iclear is the
clear sky radiance. This radiometric balance approach is applied to the mean 11 µm radiances
derived from the clear, partly clear, partly cloudy, and cloudy pixels. Only pixels with valid
clear and cloudy radiances are used. Figure 1 shows the distribution of these cloud fractions for
the partly clear and partly cloudy pixels from one day of data from June 1995. In this figure, the
8

partly cloudy results are shown separately for ice and water clouds and the mean cloud amounts
for each distribution are given in the figure legend. Occasionally, the radiance for a partly
cloudy pixel will exceed the radiance for a fully cloudy pixel, which leads to the cloud fraction
weight being greater than 1. Similarly, sometimes the radiance of a partly clear pixel will be
lower than that of a fully clear pixel, which results in the cloud fraction weight being less than 0.
These occurrences, however, are rare and do not affect the final cloud fractions assigned. The
semi-transparent nature of partly cloudy ice pixels is the likely cause of the decrease in the partly
cloudy ice fraction relative to the partly cloudy water cloud fraction. Because the radiometric
balance approximation assumes clouds are opaque and this assumption is most valid for water
clouds, the partly cloudy fraction computed for water clouds will be used for all clouds. For the
rest of the study, the cloud fraction weights of the mixed-clear and mixed-cloudy pixels are 13%
and 88%, respectively. Using these fixed values, CLAVR-x cloud fraction, f(c), is calculated
using the following expression:
(3) f(c) = Ncloudy + 0.88*Nmixed-cloudy + 0.13*Nmixed-clear
Ntotal
where Ncloudy is the number of cloudy pixels, Nmixed-cloudy is the number of mixed-cloudy pixels,
Nmixed-clear is the number of mixed-clear pixels,and Ntotal is the total number of pixels in the scene.
Another key development in CLAVR-x is the more accurate detection of clouds in
polar regions and regions of snow or sea-ice cover. This involves not only the modification of
cloud mask thresholds in regions with snow or ice, but also the improvement of the snow and ice
detection algorithm itself. The threshold modifications are based largely on the previous
methods of the AVHRR Polar Pathfinder (APP) cloud mask (Key and Barry, 1989), which will
9

be described later. This cloud mask contains developments specifically designed for use
poleward of 45o N or S. The CLAVR-x cloud mask procedures in the high latitudes are based on
the APP methods when possible. However, APP also employs temporal tests in its cloud mask
determination that are absent in CLAVR-x. The difference between CLAVR-x and APP will in
some part be an indication of the relative impact of the APP temporal tests. Similar to APP,
CLAVR-x includes a tighter range of values for the 3.75-12 µm test (TMFT), and a lower
threshold value for the 11 – 12 µm test (FMFT) than did CLAVR-1. These threshold
modifications lead to an overall lower cloud fraction in polar regions than produced by CLAVR-
1. This lower cloud fraction is in better agreement with other cloud climatologies.
In addition to modified thresholds for polar regions, CLAVR-x includes a revised
algorithm for the detection of snow and ice. This algorithm employs the use of the Normalized
Difference Snow Index (NDSI), developed for use with MODIS Snowmap (Hall and
Salomonson, 2001), for scenes where AVHRR channel 3a (1.64 µm) is available. In all other
cases, a grouped threshold approach similar to that described by Baum et al. (1999) is used. This
approach makes use of the characteristic low reflectance of snow at 3.75 µm, and the low BTD
(3.75 – 11 µm) as compared to clouds. Since clouds and snow typically share similar spectral
properties such as high reflectance at 0.65 µm and a low 11 µm BT, improved methods of
distinguishing between clouds and snow leads to a more accurate calculation of cloud fraction in
polar regions.
As noted by Stowe et al. (1999), the CLAVR-1 cloud detection algorithm should be
applied only to data from satellites with afternoon equator crossing times. This is due to the fact
10

that CLAVR-1 is not seasoned at detecting clouds in regions where the solar zenith angle is high.
Therefore, since satellites that cross the equator in the morning (such as NOAA-12) tend to view
much of the globe around dawn (when the solar zenith angle is high), CLAVR-1 can not be
reliably applied to data from these satellites. Where CLAVR-1 uses single value thresholds for
the reflectance tests, CLAVR-x adopts reflectance tests that have a dependence on the solar and
satellite viewing geometry. These modifications to CLAVR-x appear to have extended the
applicability of the CLAVR-x cloud detection to all orbits. As will be discussed later, the
CLAVR-x total cloud amounts behave similarly in the morning and the afternoon orbits,
allowing for a more true estimate of the diurnal average.
d. MODIS Cloud Amount Algorithm
Advancement in satellite imager technology has made more rigorous cloud
detection algorithms involving multi-spectral techniques possible. The Moderate Resolution
Imaging Spectroradiometer (MODIS) was launched aboard the NASA Earth Observing System
(EOS) Terra platform in 1998 and Aqua platform in 2002. A complete description of the
MODIS instrument is given by Salomonson et al. (1989). This focus of this study is on cloud
amounts derived from MODIS-Terra data rather than MODIS-Aqua data, because the orbit of the
Terra platform is closer to that of NOAA-16. The Terra platform has a polar-orbiting, sun-
synchronous orbit. MODIS has a total of 36 spectral bands between 0.415 and 14.235 µm.
Spatial resolutions for this instrument are 250 m (1 VIS, 1 NIR band), 500 m (2 VIS, 3 NIR
bands), and 1000 m (29 total VIS, NIR and IR bands). The high spatial resolution and large
number of spectral bands available with this instrument make it an excellent tool for studying the
11

intricacies of the Earth's land, ocean, atmosphere, and biological and geophysical processes.
However, the MODIS data record covers only 2000-present, so it has limited use for climate
applications.
A complete description of the MODIS cloud mask is given by Ackerman et al.
(1998). Most cloud detection with the MODIS cloud mask occurs using pixel level spectral
tests. Similar to the CLAVR cloud masks, the MODIS cloud mask classification of a pixel as
clear or cloudy depends on the results from a series of fixed threshold tests. The main difference
between MODIS and CLAVR-x is the availability of specific channels on MODIS that greatly
improve cloud detection in certain regions. For example, channels in the 1.38 and 7.7 µm water
vapor absorption bands greatly improve the detection of thin cirrus (during the day) and clouds
in the polar regions. In addition, CLAVR-x uses spatial uniformity and background fields of
climatological sea surface temperature and vegetation condition to a much greater extent than
MODIS. Similar to CLAVR-x the MODIS cloud mask classifies each pixel into four categories:
confident clear, probably clear, probably cloudy, and confident cloudy. However, unlike
CLAVR-x, the occurrence of two intermediate classes is relatively rare (<10%). In addition,
when a cloud amount is computed from the MODIS cloud mask, the four level mask is converted
to a binary mask, with the clear and probably clear pixels having an assumed zero cloud amount,
and the probably cloudy and confident cloudy having an assumed 100% cloud amount.
e. UW/HIRS Cloud Amount Algorithm
In addition to those studies that use satellite imager data, some studies make use of
the cloud detection capabilities of high spectral resolution, low spatial resolution satellite
12

sounding instruments. UW-HIRS is one such sounder-derived cloud climatology, and spans
from mid-1989 to the present. The High Resolution Infrared Sounder (HIRS) has flown aboard
the NOAA polar-orbiting satellite platforms since its inception in 1978. It senses infrared
radiation in 18 spectral bands between 3.9 and 15 µm, with a spatial resolution of 18.9 km at
nadir. Fields of view are determined to be clear or cloudy by an examination of the 11.2 µm BT.
If the 11.2 µm BT (corrected for moisture absorption) is within 2K of the surface temperature
(taken from hourly surface observation data where available, or if surface data is unavailable, the
surface temperature is assumed to be the warmest temperature across a small geographic area),
then the scene is classified as clear. In addition, the UW-HIRS cloud climatology implements a
CO2 slicing technique aimed at the detection of high clouds (Wylie and Menzel, 1989). This
approach exploits the differences in weighting function for three different CO2 absorption bands
(14.2 µm, 14.0 µm, and 13.3 µm), and is especially skillful at detecting high, thin clouds often
missed by other tests. Similar to other cloud masks discussed, the UW-HIRS cloud mask does
not estimate fractional cloud cover in a single field of view, and thus cloud amount is calculated
by dividing the number of cloudy pixels by the total number of pixels.
f. APP Cloud Amount Algorithm
The AVHRR Polar Pathfinder (APP) cloud mask (Key and Barry, 1989; Key 2002)
uses tests similar to those in CLAVR-x to detect cloud using AVHRR data. However, unlike
CLAVR-x, the tests implemented by APP have been specifically tuned for application to high
latitudes and are available poleward of 45oN and 45oS only. The APP data is AVHRR GAC data
mapped to a 5 km resolution polar stereographic grid and is produced twice daily. A
13

combination of spectral and temporal uniformity tests are used to make a final clear or cloudy
determination. No sub-pixel cloud fraction is estimated. Therefore, cloud amount is derived by
dividing the number of cloudy pixels by the total number of pixels in a scene.
Numerous studies have been conducted to validate APP products in the polar
regions (Wang and Key, 2004; Pavolonis and Key, 2003; Wang and Key, 2003; Key et al. 2001;
Maslanik et al. 2001). These studies have compared results from APP against ISCCP cloud
properties as well as surface observations from the First ISCCP Regional Experiment – Arctic
Cloud Experiment (FIRE-ACE) and Surface Heat Budget of the Arctic Ocean (SHEBA), and
observations from meteorological stations throughout the Arctic and Antarctic. These studies
have shown APP products to be consistent, in many cases, with ground based observations,
although some discrepancies still exist in cases with high, optically thin clouds (Maslanik, et al.,
2001). Wang and Key (2004) show that in the Arctic, APP cloud fraction is more consistent
with ground based observations than is ISCCP, especially during the summer months. Studies
showing a direct comparison between APP and ISCCP cloud fraction over the Antarctic have yet
to be published. However, Pavolonis and Key (2003) indicate that APP derived cloud forcing in
the Antarctic shows better agreement with ground based observations than ISCCP derived cloud
forcing, which can be directly linked to ISCCP under-detection of clouds over snow during the
summer months. Based on the results from these previous studies, this study will assume the
APP cloud amount to be the closest representation to the actual cloud amount in the high
latitudes.
14
3. Data and Methods
This study provides cloud amount comparisons for the months of July 1995,
January 1996, and part of April 2003. A summary of the different types of comparisons made, as
well as the cloud masks used and spatial resolution of each comparison is provided in Table 1. A
range of months is included to provide comparisons from several different seasonal conditions.
The CLAVR-x cloud mask is applied to AVHRR level 1b radiance data from NOAA-12,
NOAA-14, and NOAA-16. The approximate daytime equator crossing time for each of these
satellites is listed in Table 2. Since each of these satellites is in a sun-synchronous orbit, the
nighttime equator crossing time for each satellite is 12 hours after the daytime equator crossing
time. This variety of satellites is used to illustrate the utility of the CLAVR-x cloud mask as
applied to data from both morning and afternoon satellites. CLAVR-x products have 1 degree
spatial resolution when used in comparison with CLAVR-1 and MODIS, and 2.5 degree spatial
resolution when used in comparison with ISCCP. ISCCP D2 monthly mean cloud product data
are used for both July 1995 and January 1996. Prior to 2000, CLAVR-1 cloud mask results were
processed as a part of the NOAA PATMOS (AVHRR Pathfinder Atmosphere) project. Because
PATMOS processing stopped in 2000, this study uses CLAVR-1 data from July 1995 and
January 1996 only. Total cloud amount data from APP are used for July 1995 and January 1996.
Zonal mean cloud amount is calculated from the level 2 monthly mean cloud amount, poleward
of 45o N or S. Monthly mean cloud amount from UW-HIRS level 2 data are also used for July
1995 and January 1996.
TERRA MODIS cloud mask data from April 1 to April 8 2003 are also used for this
15
study. Data from the CIMSS MODIS real-time processing system is used, and cloud amounts
are recomputed from the pixel level cloud mask. This allows the MODIS results to be mapped to
the same projection as the CLAVR-x results. Because the MODIS cloud mask is most validated
for daytime applications, our comparison to MODIS is restricted to daytime data. While data
from NOAA-17 more closely matches the observation time of TERRA, the reflectance
calibration of the AVHRR on NOAA-17 has not yet been validated. Therefore, NOAA-16 data,
calibrated using the methods given by Heidinger et al. (2002), are used. This comparison
implicitly assumes the algorithmic differences will not be masked by the diurnal effects in the
four hour time difference between the two satellites.
Individual grid cell comparisons are made for CLAVR-x vs. CLAVR-1, ,ISCCP,
and MODIS. These comparisons follow the statistical methods set forth in Hou et al. (1993).
Statistical scores are assigned for each comparison, based on how similar or dissimilar the data
sets are. A detailed description of each score and the method by which it is derived is provided
by Hou et al. (1993); a brief description of each of the statistical scores is as follows. The S20
score represents the percentage of grid cells where the two cloud amounts (CLAVR-x and either
CLAVR-1, ISCCP, or MODIS) differ by 20% or less. For example, a S20 score of 0.9 indicates
that for 90% of the grid cells in a given scene, the two instruments report an absolute cloud
fraction difference of 20% or less. Note that this does not necessarily indicate that 90% of the
grid cells in a given scene differ by 20% or less of the mean value of cloud fraction for the scene.
This score varies from 0-1, and provides an indication of how well the two datasets agree.
Higher scores indicate better agreement. The S-60 score is a natural counterpart to the S20 score.
16

It represents the percentage of grid cells where the two cloud amounts differ by more than 60%.
This score also varies from 0-1, and indicates whether or not the two datasets disagree. Higher
scores indicate lesser agreement. This score can be used as an indicator of how often the
geographic location of clouds are different between two cloud masks, because differences in
cloud amount greater than or equal to 60 will most likely occur when one product indicates a
fully clear grid cell and another product indicates fully cloudy. The Heidike score, Sh , ranges
from 0 to 1, and measures how closely the two cloud datasets are statistically related to each
other. Higher Heidike scores indicate an increased likelihood that the two datasets are not
statistically independent of each other. The root mean square error, Srms, is a commonly used
indicator of the difference between two datasets. High values of Srms indicate a greater difference
between the two datasets. The bias score, Sbias, ranges from -1 to 1, and is used to compare
overall difference in cloud amount. A large positive (negative) bias score indicates that the
comparison data set (ISCCP, CLAVR-1 or MODIS) has a much higher (lower) overall cloud
amount than CLAVR-x. Finally, the absolute difference score, Sabs, shows the mean magnitude
of the absolute difference between the two datasets. Lower scores indicate that the two datasets
are in better agreement.
An individual grid cell comparison is not performed for APP or UW-HIRS due to
differences in the gridding of each of these products, and the complexities involved in re-
gridding each them to be similar to CLAVR-x. Instead, a 2.5 degree zonal mean comparison is
performed, so that a general regional comparison could be made without the complexity of
attempting an individual grid cell comparison.
17

4. Results
In this section, results from a series of cloud mask comparisons are presented.
These comparisons provide an analysis of global cloud amount and distribution of CLAVR-x
and the five additional cloud masks previously described. Zonal mean comparisons are
performed for each of the cloud masks. In addition, individual grid cell comparisons are
performed for CLAVR-x vs. CLAVR-1, ISCCP and MODIS. The CLAVR-1 vs. CLAVR-x
comparison includes analysis of both the ascending and descending orbits of the satellite. For all
other comparisons, the CLAVR-x cloud amount is averaged over a diurnal cycle using the
ascending and descending passes of the both the morning and afternoon satellites (NOAA-12 and
NOAA-14). The comparisons are shown separately for July 1995 and January 1996. Because
MODIS data was not available for these times, a separate section comparing MODIS to
CLAVR-x for April 2003 is presented at the end.
a. July 1995
The cloud masks used for comparison for July 1995 are ISCCP, CLAVR-1,
CLAVR-x, APP, and UW-HIRS. As described previously, CLAVR-1 cloud mask may only be
applied to data from afternoon orbiting satellites (e.g. NOAA-14). The resulting cloud amounts
are compared to CLAVR-x results from the same orbits. ISCCP cloud amount is produced every
three hours and is therefore capable of producing a truer diurnal average. The diurnal average of
the APP cloud amount is produced by averaging two daily fields produced at 0200 and 1400
LST. To estimate a diurnal average using CLAVR-x, the algorithm is applied to AVHRR data
from the ascending and descending passes of both the morning and afternoon satellites. Figure 2
18

shows the July 1995 diurnally averaged zonal mean cloud amount from CLAVR-x derived using
this methodology, as well as the zonal mean cloud amount from each of the individual satellite
passes. This figure illustrates that cloud amounts from each of the satellite orbits follow a
consistent trend, regardless of the time from which they were derived. In addition, the diurnal
average falls within approximately10% of each of the individual orbits. These diurnally
averaged results from CLAVR-x will be compared to each of the previously mentioned products.
Figure 3 shows the difference between CLAVR-x and CLAVR-1 cloud amount for
the ascending (daytime) and descending (nighttime) passes of NOAA-14, at 1 degree resolution.
In these figures, lighter areas indicate regions where CLAVR-x cloud amount exceeds CLAVR-
1, and darker areas indicate the opposite. The greatest differences between the two datasets
occur in the polar regions. This is to be expected, given that the CLAVR-x algorithm has been
modified significantly from CLAVR-1, to more accurately detect clouds in these areas.
CLAVR-x consistently observes less cloud in both the Antarctic and Arctic, including
Greenland. In the non-polar regions, cloud amounts from the ascending pass show more
variability than the descending pass. Figure 3 (top) shows that for the ascending pass, CLAVR-x
exceeds CLAVR-1 by 20% or more in many areas, especially mid to high latitude oceanic
regions. These differences may result from the fact that some of the cloud mask tests employed
by CLAVR-x refer to a Reynolds SST climatology to help determine thermal threshold values,
while CLAVR-1 relies on a set of single-value thermal thresholds . Cloud amounts from the
descending pass show closer agreement between CLAVR-x and CLAVR-1, with differences
between the two averaging less than 20%, excluding the polar regions. On average, excluding
19

the polar regions, the two datasets tend to agree to within about 20%, with CLAVR-x observing
slightly more cloud than CLAVR-1.
Table 3 shows the CLAVR-x vs. CLAVR-1 statistical scores. These scores
quantify the agreement between CLAVR-x and CLAVR-1 cloud amount derived from the
average over the ascending and descending passes of NOAA-14. The S20 scores indicate that the
CLAVR-1 and CLAVR-x cloud amounts agree to within 20% approximately 69% of the time
globally, and about 87% of the time between 60oS and 60oN. Differences greater than 20% (but
less than 60%) may be caused in part by the fact that some pixels that are classified as mixed
clear or mixed cloudy by CLAVR-x (and thus assigned a cloud amount of 0.13 or 0.88) will be
classified as partly cloudy by CLAVR-1 (and assigned a cloud amount of 0.5). The S-60 score
indicates that between 60oS and 60oN , the two datasets do not differ by more than 60% in any
location, which suggests that they are in excellent agreement on the geographic location of
clouds. This further supports that in this region, the differences in cloud amount implied by the
S20 score are not due to the failure of either cloud mask to detect cloud consistent with the other,
but rather due to the two cloud masks assigning different cloud amounts to pixels in which at
least some cloud is detected . The bias scores indicate that CLAVR-1 observes only slightly less
cloud than CLAVR-x between 60oS and 60oN but in excess of 30% more cloud in the polar
regions. The region between 60oS and 60oN is characterized by a moderately high Heidike score,
and low root mean square and absolute errors, all of which suggest very good agreement between
the two datasets. The agreement indicated by these scores decreases globally, however, the
global values still indicate moderate agreement between the two datasets. As should be expected
20

considering the changes made to the CLAVR-x algorithm in the polar regions, all scores suggest
poor agreement between the two datasets poleward of 60oS or 60oN.
Table 4 shows the July 1995 global cloud amount from each of the cloud mask
products. Because CLAVR-x observes more cloud outside of the polar regions and less cloud
within the polar regions than CLAVR-1, its global cloud amount is only slightly larger. Both
ISCCP and UW-HIRS observe significantly more cloud globally than either of the CLAVR
products. One possible cause for this may be a function of how cloud amount is computed for
ISCCP and UW-HIRS vs. CLAVR. There are no partly cloudy pixels in either ISCCP or UW-
HIRS, and every cloudy pixel is considered to be 100% cloud covered. This philosophical
difference with CLAVR may account for systematic cloud amount differences in regions of
broken cloudiness. To quantify this effect, the CLAVR-x cloud classifications from 7 ascending
orbits of NOAA-14 were analyzed. Table 5 shows the mean and standard deviation of the
percentage of the cloud mask for all categories (mixed-clear, mixed-cloudy, and cloudy
categories) calculated over these seven orbits. When all clouds are considered, nearly half of the
pixels in these orbits fall into one of the mixed categories. When only water clouds are
considered, this increases to about 55%. When calculated using the same methodology used by
CLAVR-x, the values listed in Table 5 lead to an overall cloud fraction of 56.39% (all clouds).
If we exclude the mixed categories and assign a cloud fraction of 1 to all mixed-cloudy and
cloudy pixels, and a cloud fraction of 0 to all mixed-clear and clear pixels, the cloud fraction
increases to 57.63%. However, if all mixed-clear, mixed-cloudy, and cloudy pixels are assigned
a cloud fraction of 1, then this number increases to 77.64%. These values are enhanced when
21

only water clouds are included, with the percentages being 62.57%, 63.57%, and 87.05%,
respectively. Although it is unclear exactly how the mixed pixels would be classified by ISCCP,
it is likely that most of the CLAVR-x mixed-cloudy pixels and some of the mixed-clear pixels
will be classified as cloudy by ISCCP. It follows that the difference in the way cloud amount is
assigned by CLAVR-x vs. ISCCP is capable of producing the differences in global cloud amount
observed between these two products.
There are several factors that may contribute to the UW-HIRS cloud mask
observing the highest cloud amount. One is that the CO2 slicing technique it implements has
skill at detecting optically thin cirrus clouds. These clouds may be missed with the threshold tests
and temporal sampling methods used by CLAVR and ISCCP. However, the zonal distributions
(shown in Figures 5 and 8) indicate that the largest differences between UW-HIRS and the other
products occur over a wide region including the subtropics and tropics. The fact that these large
differences occur over regions including those not dominated by cirrus may indicate that factors
other than the UW-HIRS CO2 slicing cirrus detection capability may be the cause of this
difference. For example, the UW-HIRS instrument has a much larger field of view at nadir than
does AVHRR (nearly 19 km, compared to 4 km for AVHRR). For fields of view classified as
cloudy, this results in a much larger geographic area being assigned a cloud amount of 100%,
and will lead to an overestimation of cloud amount, especially in areas of broken cloudiness.
Finally, the 2K 11 µm BT threshold used in the UW-HIRS cloud detection algorithm is
significantly lower than the threshold implemented by any of the other cloud masks described,
which leads to a higher likelihood that fields of view will be determined as cloudy.
22

Figure 4 shows the comparison between ISCCP and CLAVR-x both globally and
zonally. The top two plots show the actual cloud amounts for CLAVR-x (left) and ISCCP
(right). The bottom left plot shows the difference between ISCCP and CLAVR-x cloud amount
derived from NOAA-14 and NOAA-12. Lighter areas in this plot indicate regions where the
CLAVR-x cloud amount exceeds the ISCCP cloud amount. Darker areas indicate the opposite.
As was the case with CLAVR-1, the largest differences occur in the polar regions. Unlike
CLAVR-1, however, the differences at the north and south poles are of opposite sign. CLAVR-x
shows very few clouds over the Antarctic, and ISCCP cloud amount exceeds CLAVR-x
significantly in this region. Over most of the Arctic, the CLAVR-x cloud amount exceeds
ISCCP by more than 20%. CLAVR-x and ISCCP use different tests and thresholds, and thus
these differing results are expected. It may be noted that the ISCCP-D2 dataset has a tendency to
underestimate cloud fraction during polar summer (Wang and Key, 2004; Pavolonis and Key,
2003). During polar winter, the spatial and temporal uniformity tests employed by ISCCP could
aid in the detection of cloud, when many of the threshold tests used by CLAVR-x are not
implemented due to the high solar zenith angle. In addition to the polar regions, ISCCP cloud
amount also exceeds CLAVR-x over the Tibetan Plateau, the Andes Mountains of South
America, and the North American Rockies. This is possibly due to the fact that CLAVR-x
employs the use of a detailed terrain map which could aid in discriminating between snow and
cloud in mountainous regions. Additionally, there is a significant swath that stretches from
Madagascar northward over the Indian Ocean, where ISCCP cloud amount exceeds CLAVR-x
by more than 20%. This is a feature of the ISCCP data set, and is due to the gaps in
23

geostationary satellite data coverage over the Indian Ocean. On average, the global trend in
cloud amount is similar between ISCCP and CLAVR-x, as is shown by the zonal mean plot in
the bottom right of the figure. The magnitude of cloud amount differs slightly between the two,
with ISCCP observing more cloud globally (excluding the Arctic) than CLAVR-x.
Table 6 shows the July 1995 CLAVR-x vs. ISCCP statistical scores for both the
NOAA-12 and NOAA-14 orbits. For both orbits, all scores indicate good agreement between
CLAVR-x and ISCCP, with 20% or better agreement occurring for over 72% of the pixels
globally. For either orbit, the two datasets disagree by 60% or more less than 1% of the time
globally, all of which occurs in the polar regions. As was the case with CLAVR-1, the scores
show better agreement when polar regions are excluded. In addition, both the NOAA-12 and the
NOAA-14 scores indicate that globally, CLAVR-x agreement with ISCCP is similar to or better
than its agreement with CLAVR-1, despite the fact that the total global cloud amount would
indicate the opposite. This suggests that globally, the trend in CLAVR-x cloud amount more
closely follows ISCCP than CLAVR-1.
Figure 5 shows the zonal mean comparison of cloud amount from CLAVR-x
(averaged over NOAA-14 and NOAA-12) with ISCCP, CLAVR-1, UW-HIRS, and APP.
Excluding the polar regions, CLAVR-x shows a similar trend in zonal mean cloud amount with
all of the products. CLAVR-x cloud amount tends to be lower than both ISCCP and UW-HIRS
for reasons discussed previously. The zonal mean cloud amount from CLAVR-x exhibits
substantial differences with ISCCP, UW-HIRS, and CLAVR-1 poleward of about 70oN.
However, CLAVR-x cloud amount in this region very closely mirrors that given by APP.
24

Poleward of 60oS, CLAVR-x exhibits a trend similar to APP and ISCCP, but shows a lower
cloud amount than either of these products. However, it should be noted that in this region,
CLAVR-x shows significantly better agreement with other products than does CLAVR-1.
CLAVR-x differs from ISCCP by about 20% at most, while CLAVR-1 differs from ISCCP by as
much as 60%. The maximum differences from APP are similar for both CLAVR-1 and
CLAVR-x, but CLAVR-x follows the trend of APP much more closely than does CLAVR-1.
b. January 1996
The cloud masks used for comparison for January 1996 are ISCCP, CLAVR-1,
CLAVR-x, APP, and UW-HIRS. Similar to the previous case, cloud amounts from CLAVR-x
and CLAVR-1 are compared for similar orbits of NOAA-14. The diurnally averaged cloud
amounts from ISCCP and APP are compared to diurnally averaged CLAVR-x cloud amounts,
derived by averaging over both the ascending and descending passes of NOAA-12 and NOAA-
14. The biggest difference between the July and January results are in the performance of each
algorithm in detecting cloud in the snow-covered regions of the Northern Hemisphere.
Figure 6 shows the difference between CLAVR-x and CLAVR-1 cloud amount for
the ascending (daytime) and descending (nighttime) passes of NOAA-14, as well as the diurnal
average. For both orbits, CLAVR-1 cloud amount exceeds CLAVR-x in the polar regions. Such
is also the case in the continental Northern Hemisphere, north of approximately 50oN, where
snow cover is prevalent in the winter. This pattern is particularly apparent in the descending
orbit. The snow and ice detection algorithm implemented by CLAVR-x is much more rigorous
than CLAVR-1, which supports the conclusion that in this case, CLAVR-1 is most likely falsely
25

detecting cloud in regions of snow or ice cover. Elsewhere, trends in cloud amount are similar
for CLAVR-1 and CLAVR-x, especially over oceanic regions. Globally, CLAVR-x observes
slightly less cloud than CLAVR-1.
Table 7 shows the CLAVR-x vs. CLAVR-1 statistical scores. The S20 scores
indicate that agreement between these two datasets is slightly lower than the July 1995 case
across all of the regions examined. According to these scores, CLAVR-x and CLAVR-1 agree
to within 20% for approximately 63% of the pixels globally, and for over 82% of the pixels
between 60oS and 60oN. In the polar regions, these two datasets agree to within 20% for only
slightly more than 25% of the pixels. The S-60 scores indicate that CLAVR-x and CLAVR-1
differ by more than 60% for about 3% of the pixels globally, less than 1% of which occur outside
of the polar regions. This suggests that between 60oS and 60oN, CLAVR-x and CLAVR-1 are
generally in good agreement as to the geographic location of clouds. Poleward of 60oS and 60oN,
the S-60 score indicates that CLAVR-x and CLAVR-1 disagree on the geographic location of
clouds 9% of the time, which is significantly better than the July 1995 case. The bias scores
indicate that in the polar regions, CLAVR-1 observes significantly more cloud than CLAVR-x,
and between 60oS and 60oN, CLAVR-x observes only marginally less. As was the case with the
July 1995 case, the region between 60oS and 60oN has a moderately high Heidike score, and low
root mean square and absolute errors, all of which suggest very good agreement between the two
datasets. The agreement indicated by these scores decreases globally, due to the substantial
disagreement between the to datasets at high latitudes.
Table 4 shows the January 1996 global cloud amount for each of the cloud mask
26

products. CLAVR-x has the lowest global cloud amount of the four products; only slightly
lower than CLAVR-1. UW-HIRS observes the highest global cloud amount, followed by
ISCCP. These results are consistent with those from July 1995, and the reasoning described
previously applies here as well.
Figure 7 shows the comparison between January 1996 cloud amounts from ISCCP
and CLAVR-x. The top two plots show the global distribution of cloud amount from CLAVR-x
(left) and ISCCP (right). The plot in the bottom left of this figure shows the difference between
ISCCP and CLAVR-x cloud amount for January 1996. This plot indicates that the two datasets
agree to within 20% over most of the oceanic regions, excluding over the Indian Ocean (for
reasons described in section 3a.) The two datasets differ significantly over the poles, with
CLAVR-x observing more cloud across the Antarctic, and ISCCP observing more cloud in the
arctic. ISCCP observes significantly more cloud over the Northern Hemisphere land covered
surfaces that are typically snow covered in January, such as Canada and Siberia. This is likely
due to the fact that snow is difficult to distinguish from clouds using the temporal and spatial
tests implemented by ISCCP. However, despite these differences, the overall trend of cloud
amount, as shown by the zonal averages in the bottom right plot, is similar between CLAVR-x
and ISCCP. On average, excluding the antarctic, ISCCP observes slightly more cloud than
CLAVR-x globally.
Table 8 shows the ISCCP vs. CLAVR-x comparative statistics from January, 1996,
for both NOAA-12 and NOAA-14. These scores indicate good agreement between CLAVR-x
and ISCCP, with 20% or better agreement occurring for over 73% of the pixels globally. The
27

S-60 score indicates that the two datasets differ by more than 60% less than 1% of the time
globally, none of which occurs outside of the polar regions. The bias score indicates that ISCCP
observes slightly more cloud globally than CLAVR-x. Spatial and temporal trends in cloud
amount can be difficult to detect over snow covered surfaces. This may lead to an
overestimation of cloud by ISCCP for regions poleward of 60oN, and some land covered surfaces
as far south as 40oN. When polar regions are excluded, all scores indicate that there is excellent
agreement between the two datasets, with cloud amounts agreeing to within 20% close to 82% of
the time. Overall, the agreement between CLAVR-x and ISCCP for this month is only slightly
less than for the summertime case (July 1995).
Figure 8 shows the January 1996 zonal mean cloud amounts from CLAVR-x,
CLAVR-1, ISCCP, UW-HIRS, and APP. The largest differences between the different products
occur in the polar regions, especially in the Northern Hemisphere. Poleward of 45oN and S,
CLAVR-x exhibits a trend similar to APP, while the other products all differ significantly not
only from APP but also from one another. The CLAVR-x threshold tests have been modified in
the polar regions based on the APP algorithm, and thus some agreement is expected. However,
this agreement also lends credibility to CLAVR-x given that there are still significant differences
between the two algorithms, and since APP has been established as the most reliable cloud mask
for use in the polar regions. Between approximately 60oS and 40oN, CLAVR-x is in excellent
agreement with both CLAVR-1 and ISCCP. However, CLAVR-x shows much less cloud over
regions of snow and ice cover than either CLAVR-1 or ISCCP. UW-HIRS shows a similar
trend, but with a significantly higher cloud amount in the tropics than any other product. As was
28

found for the July 1995 case, the UW-HIRS and CLAVR-x cloud amounts are very similar
poleward of about 40oS, but diverge elsewhere.
c. Seasonal cycle comparison between ISCCP and CLAVR-x
Analysis of July 1995 and January 1996 cloud amount from ISCCP and CLAVR-x
leads to an assessment of how each of these two datasets captures the seasonal variability of
cloud cover. Figure 9 shows the seasonal cycle (July – January cloud amount) as observed by
CLAVR-x (top left) and ISCCP (top right). These two images show remarkable similarity
between the two datasets. This is confirmed by the bottom left panel, which shows the
difference between the CLAVR-x and ISCCP seasonal cycle. The differences shown in this
image are 15% or less globally, with 10% or better agreement for many pixels. The regions
where there is the greatest difference between CLAVR-x and ISCCP are primarily those that
were mentioned in previous discussions: the Arctic, Antarctic, and the mid to high latitude
continental Northern Hemisphere. Cloud detection in these regions is made difficult in winter by
persistent snow cover. Oceanic regions show the best agreement, with ISCCP and CLAVR-x
agreeing to within 5% or better in many areas. This excellent agreement is confirmed by the
zonal averages shown in the lower right image. The zonal mean seasonal cycle is nearly
identical for the two approaches between about 60oS and 60oN. This supports the previous
assertion that the total cloud amount differences between ISCCP and CLAVR-x occur primarily
due to fundamental differences in the way that cloud amount is calculated for each, rather than
the inability of either cloud mask to detect a certain cloud type.
29

d. Comparisons with MODIS
As previously described, the data used for this comparison is daytime data from
TERRA MODIS between April 1 and April 8 2003. The MODIS cloud mask data are mapped to
the same projection as the CLAVR-x data. Both zonal and global comparisons are included for
this time period. Cloud amount is calculated by dividing the number of cloudy pixels (both
confidently cloudy and probably cloudy) in a grid cell by the total number of pixels in the grid
cell.
Table 9 shows the MODIS vs. CLAVR-x statistical scores. These scores indicate
that the agreement between MODIS and CLAVR-x is slightly poorer than for ISCCP and
CLAVR-x. However, this may be due to the difference in the amount of time included in the
comparison (7 days vs. 1 month.) Weekly averages will tend to show more structure and
variability in global cloud amount and distribution than monthly averages. Despite this fact, the
scores in Table 9 indicate moderate agreement between MODIS and CLAVR-x, with 20% or
better agreement for nearly 65% of the pixels. When polar regions are excluded, this figure
increases to almost 78% of the pixels. Disagreement greater than 60% occurs only slightly more
than 1% of the time, and in the polar regions only. Globally, MODIS observes slightly more
cloud than CLAVR-x.
Figure 10 shows the comparison of the CLAVR-x and MODIS total cloud amounts
for April 1-8, 2003. The upper panels are the mean day-time cloud amounts for MODIS (right)
and CLAVR-x (left). The image in the lower left shows the difference between MODIS and
CLAVR-x while the zonal averages are given in the lower right. Because the period of
30

comparison is 7 days rather than one month as in the other comparisons, the global fields of
cloud amount in Figure 10 show more structure than the monthly averages shown in previous
comparisons. The CLAVR-x and MODIS fields show many similarities. However, the
difference plot in Figure 10 (lower left) reveals regions where the differences exceed 20%. For
example, during this period, MODIS produced more cloud over Antarctica, the Arctic, and high
latitude land surfaces in the Northern Hemisphere that are likely snow covered. These
differences between MODIS and CLAVR-x at high latitudes are also evident in the zonal
averages (lower right). In addition, zonally averaged MODIS cloud amount exceeds that of
CLAVR-x for almost all zones. Analysis of the spatial differences in the MODIS – CLAVR-x
difference outside of the areas discussed above indicates that differences are distributed fairly
uniformly, and are not concentrated in any single area. This uniform distribution of the MODIS
– CLAVR-x differences indicates that cloud amount differences are not due differences in the
detection of any one cloud type such as tropical cirrus. While MODIS has spectral channels
missing from AVHRR that improve cirrus detection, the uniform distribution of the differences
coupled with the non-uniform distribution of cirrus indicates that sensitivity to cirrus does not
appear to be dominant factor in the MODIS – CLAVR-x differences. Overall, for this period,
the global MODIS cloud amount is 8% higher than that from CLAVR-x. Much of this
difference is due to the differences at high latitudes. Because the zonal averages of CLAVR-x are
in rough agreement with APP for the July and January months studies, it is unclear if this
difference at high latitudes is a weakness of CLAVR-x revealed by the improved spectral
information from MODIS.
31

5. Conclusions
The results of this study support that the CLAVR-x cloud mask performs
consistently with other cloud mask products such as ISCCP, MODIS, and UW-HIRS. The fact
that CLAVR-x includes multiple cloud mask classifications (clear, partly clear, partly cloudy and
cloudy) as opposed to a simple binary (clear or cloudy) classification in its calculation of total
cloud amount accounts for much of the difference between CLAVR-x and these other products.
However, the zonal mean trends in cloud amount exhibited by CLAVR-x are consistent with
these other products. By selecting cases that cover a variety of seasons, this study has shown
that CLAVR-x daytime cloud amount is reliable in both summer and winter cases. In addition,
this study has shown that CLAVR-x has improved upon CLAVR-1 in two important respects.
First, cloud amounts from CLAVR-x may be used reliably from satellites with either morning or
afternoon equator crossing times. Second, CLAVR-x has added a more rigorous algorithm for
the detection of snow and ice. This has improved upon the CLAVR-1 cloud detection in the
polar regions, as documented by the high degree of agreement between CLAVR-x and APP
cloud amount. These improvements have been made while maintaining good agreement
between CLAVR-x and CLAVR-1 in areas where CLAVR-1 has historically performed well,
namely in the mid-latitudes for afternoon orbiting satellites. In light of these improvements, and
the potential of the AVHRR data record being extended for an additional 14 years, CLAVR-x
may prove to be a very useful tool for future studies of global clouds and their climatology.
Preliminary investigation of nighttime cloud amount by examination of the diurnal average cloud
amount is encouraging, however, further study is needed to verify CLAVR-x nighttime cloud
32

amount reliability. In addition, future work should include regional studies that analyze
CLAVR-x cloud properties at different levels for a variety of cloud systems. This type of future
study will help to identify the specific conditions under which the largest differences between
CLAVR-x and other products exist. Future studies should also include comparisons of other
satellite retrieved properties such as surface temperature, clear-sky albedo, and cloud top
properties.
Acknowledgments
Funding for this research was provided by the NOAA Polar Program
(NA07EC0676). The authors would also like to thank Richard Frey for providing assistance
with MODIS cloud mask processing, and Donald Wylie for providing data from UW-HIRS.
The views, opinions, and findings contained in this report are those of the authors and should not
be construed as an official National Oceanic and Atmospheric Administration or U.S.
Government position, policy, or decision.
33

References
Ackerman, S. A., K. Strabala, W.P. Menzel, R. Frey, C. Moeller, and L. Gumley, 1998:
Discriminating clear sky from clouds with MODIS. J. Geophys. Res., 103, 32141-32157.
Baum, B. A., and Q. Trepte, 1999: A grouped threshold approach for scene identification in
AVHRR imagery. J. Atmos. Oceanic Technol., 16, 793-800.
Hall, D. K., and V. V. Salomonson, cited 2001: Algorithm theoretical basis document (ATBD)
for the MODIS Snow and Sea Ice Mapping Algorithms. [Available online at
http://modis.gsfc.nasa.gov/data/atbd/atbd_mod10.pdf.]
Heidinger, A. K., cited 2004: CLAVR-x Cloud Mask Algorithm Theoretical Basis Document
(ATBD). [Available online at http://cimss.ssec.wisc.edu/clavr/clavrx_docs.html.]
Heidinger, A. K., V. R. Anne, and C. Dean, 2002: Using MODIS to estimate cloud
contamination of the AVHRR data record. J. Atmos. Oceanic Technol., 19, 586-601.
Heidinger, A. K., R. Frey and M. J. Pavolonis, 2004: Relative Merits of the 1.6 and 3.75 micron
channels of the AVHRR/3 for cloud detection. Accepted by CJRS.
34

Hou, Y. T., K. A. Campana, K. E. Mitchell, S. K. Yang, and L. L. Stowe, 1993: Comparison of
an experimental NOAA AVHRR cloud dataset with other observed and forecast cloud datasets.
J. Atmos. Oceanic Technol., 10, 833-849.
Key, J., 2002: The Cloud and Surface Parameter Retrieval (CASPR) system for polar AVHRR
user's guide. University of Wisconsin-Madison, 61 pp.
Key, J. and R.G. Barry, 1989. Cloud cover analysis with Arctic AVHRR, part 1: cloud detection.
J. Geophys. Res., 94 (D15), 18521-18535.
Key, J., X. Wang, J. Stroeve, and C. Fowler, 2001: Estimating the cloudy sky albedo of sea ice
and snow from space. J. Geophys. Res., 106, 12489-12497.
Liou, K. N., 1986: Influence of cirrus clouds on weather and climate: A global perspective. Mon.
Wea. Rev., 114, 1167-1199.
Maslanik, J. A., J. Key, C.W. Fowler, T. Nguyen, and X. Wang, 2001: Spatial and temporal
variability of satellite-derived cloud and surface characteristics during FIRE-ACE. J. Geophys.
Res., 106, 15233-15249.
35

McClain, E. P., W. G. Pichel and C. C. Walton, 1985: Comparative performance of AVHRR-
based multicnhannel sea surface temperatures. J. Geophys. Res., 90, 11587- 11601.
McClain, E. P., 1989: Global sea surface temperatures and cloud clearing for aerosol optical
depth estimates. Int. J. Remote Sens., 10, 763-769.
Molnar, G., and J.A. Coakley, Jr., 1985: The retrieval of cloud cover from satellite imagery data:
A statistical approach. J. Geophys. Res., 90, 12960-12970.
Pavolonis, M. J. and J. R. Key, 2003: Antarctic cloud radiative forcing at the surface estimated
from the AVHRR Polar Pathfinder and ISCCP D1 datasets, 1985-93. J. Appl. Meteor., 42, 827-
840.
Ramanathan, V., R. D. Cess, E. F. Harrison, P. Minnis, B. R. Barkstorm, and D. Hartman, 1989:
Cloud radiative forcing and climate: Results from the earth radiation budget experiment. Science,
243, 57-63.
Rossow, W. B., and A. A. Lacis, 1990: Global, seasonal cloud variations from satellite radiance
measurements. Part II: Cloud properties and radiative effects. J. Climate, 3, 1204-1253.
36

Rossow, W. B., and L. C. Garder, 1993: Cloud detection using satellite measurements of infrared
and visible radiances for ISCCP. J. Climate, 6, 2341-2369.
Salomonson, V. V., W. L. Barnes, P. W. Maymon, H. E. Montgomery, and H. Ostrow, 1989:
MODIS: Advanced facility instrument for studies of the earth as a system. IEEE Trans. Geosci.
Remote Sens., 27, 145-153.
Schiffer, R. A., and W. B. Rossow, 1983: The International Satellite Cloud Climatology Program
(ISCCP): The first project of the World Climate Research Program. Bull. Amer. Meteor. Soc., 64,
779-784.
Stephens, G. L., and T. J. Greenwald, 1991: The earth's radiation budget and its relation to
atmospheric hydrology: 2. Observations of cloud effects. J. Geophys. Res., 96, 15 325-15 340.
Stowe, L. L., P. A. Davis, and E. P. McClain, 1999: Scientific basis and initial evaluation of the
CLAVR-1 global clear/cloud classification algorithm for the advanced very high resolution
radiometer. J. Atmos. Oceanic Technol., 16, 656-681.
Wang, X. and J. R. Key, 2003: Recent trends in Arctic surface, cloud, and radiation properties
from space. Science., 299, 1725-1728.
37

Wang, X. and J. R. Key, 2004: Arctic Surface, cloud, and radiation properties based on the
AVHRR Polar Pathfinder data set. Part I: Spatial and temporal characteristics. Submitted to
Journal of Climate.
Wielicki, B. A, T. M. Wong, R. P. Allan, A. Slingo, J. T. Kiehl, B.J. Soden, C.T. Gordon, A.J.
Miller, S. K. Yang, D.A. Randall, F. Robertson, J. Susskind, and H. Jacobowitz, 2002: Evidence
for large decadal variability in the tropical mean radiative energy budget. Science, 295 (5556),
841-844.
Wylie , D. P., and W. P. Menzel, 1989: Two years of cloud cover statistics using VAS. J.
Climate, 2, 380-392.
Wylie, D. P., and W. P. Menzel, 1999: Eight years of high cloud statistics using HIRS. J.
Climate, 12, 170-184.
38

List of Figures
Figure 1. Distribution of cloud fraction weights determined by a 11 micron radiative balance for
the partly clear and the partly cloudy (seperated by phase). The mean weights are given in
parentheses in the figure legend.
Figure 2. CLAVR-x July 1995 zonal mean cloud amount for the ascending and descending
orbits of NOAA-12 and NOAA 14. Latitudes are positive in the Northern Hemisphere and
negative in the Southern Hemisphere.
Figure 3. July 1995 difference between CLAVR-x and CLAVR-1, for the ascending and
descending orbits of NOAA-14.
Figure 4. Comparison of CLAVR-x and ISCCP cloud amounts for July 1995. Upper left image
shows the CLAVR-x cloud amount. Upper right shows the ISCCP cloud amount. Lower left is
the difference (CLAVR-x – ISCCP). Lower right shows a comparison of the zonal averages of
CLAVR-x and ISCCP. Global mean cloud amounts are given in parentheses in the lower right
plot. Latitudes are positive in the Northern Hemisphere, and negative in the Southern
Hemisphere.
39

Figure 5. July 1995 zonal mean cloud amount from CLAVR-x (average of NOAA-14 and
NOAA-12), CLAVR-1, ISCCP, APP, and UW-HIRS. Latitudes are positive in the Northern
Hemisphere, and negative in the Southern Hemisphere.
Figure 6. January 1996 difference between CLAVR-x and CLAVR-1 for the ascending and
descending orbits of NOAA-14.
Figure 7. Same as Figure 4 except for January 1996. Latitudes are positive in the Northern
Hemisphere, and negative in the Southern Hemisphere.
Figure 8. January 1996 zonal mean cloud amount from CLAVR-x (average of NOAA-14 and
NOAA-12), CLAVR-1, ISCCP, APP, and UW-HIRS. Latitudes are positive in the Northern
Hemisphere, and negative in the Southern Hemisphere.
Figure 9. Same as Figure 4 except fields shown for the cloud amount differences between July
1995 and January 1996. Latitudes are positive in the Northern Hemisphere, and negative in the
Southern Hemisphere.
40

Figure 10. Comparison of NOAA-16/CLAVR-x and TERRA/MODIS daytime cloud amounts
for April 1-8, 2003.. Upper left image shows the CLAVR-x cloud amount. Upper right shows
the MODIS cloud amount. Lower left is the difference (MODIS – CLAVR-x). Lower right
shows a comparison of the zonal averages of CLAVR-x and MODIS. Global mean cloud
amounts are given in parentheses in the lower right plot. Latitudes are positive in the Northern
Hemisphere, and negative in the Southern Hemisphere.
41

Figure 1. Distribution of cloud fraction weights determined by a 11 micron radiative balance for
the partly clear and the partly cloudy (separated by phase). The mean weights are given in
parentheses in the figure legend.
0.0 0.2 0.4 0.6 0.8 1.0 1.2Radiative Balance Cloud Fraction Weight
0
1
2
3
4
5R
elat
ive
Occ
uren
ce
partly cloudy water (0.88)partly cloudy ice (0.65)partly clear (0.13)
42
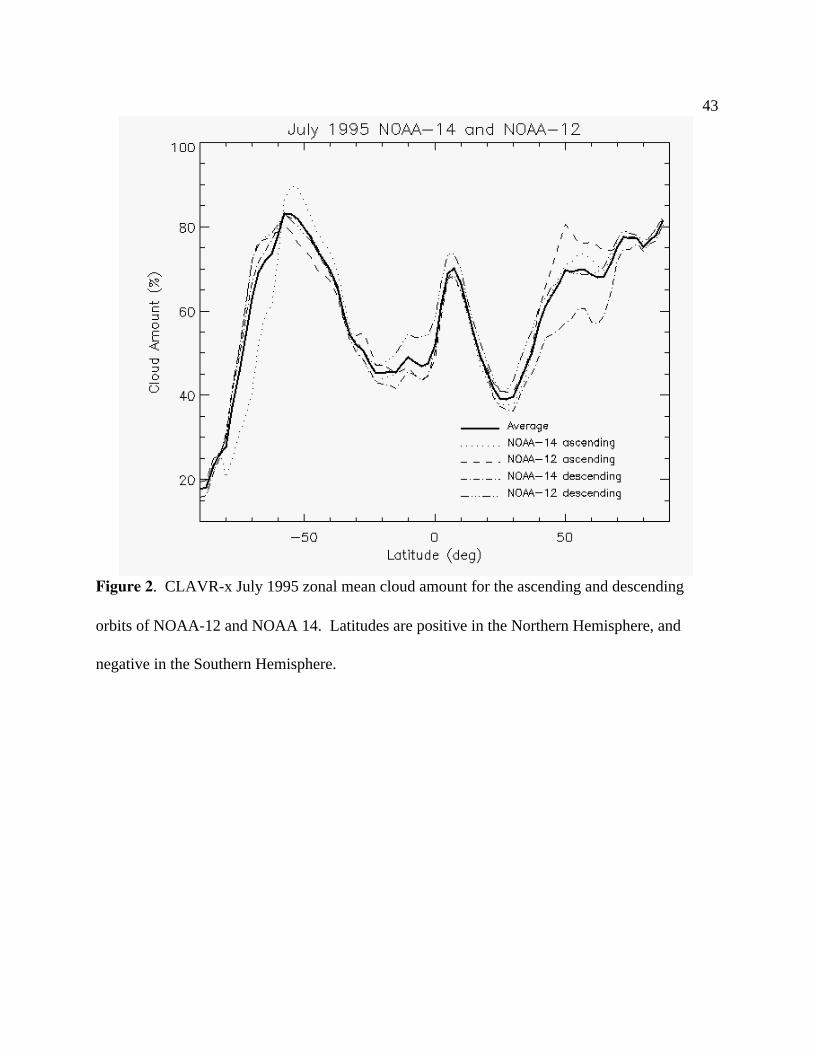
Figure 2. CLAVR-x July 1995 zonal mean cloud amount for the ascending and descending
orbits of NOAA-12 and NOAA 14. Latitudes are positive in the Northern Hemisphere, and
negative in the Southern Hemisphere.
43

Figure 3. July 1995 difference between CLAVR-x and CLAVR-1, for the ascending anddescending orbits of NOAA-14.
44

Figure 4. Comparison of CLAVR-x and ISCCP cloud amounts for July 1995. Upper left image
shows the CLAVR-x cloud amount. Upper right shows the ISCCP cloud amount. Lower left is
the difference (CLAVR-x – ISCCP). Lower right shows a comparison of the zonal averages of
CLAVR-x and ISCCP. Global mean cloud amounts are given in parentheses in the lower right
plot. Latitudes are positive in the Northern Hemisphere, and negative in the Southern
Hemisphere.
45

Figure 5. July 1995 zonal mean cloud amount from CLAVR-x (average of NOAA-14 and
NOAA-12), CLAVR-1, ISCCP, APP, and UW-HIRS. Latitudes are positive in the Northern
Hemisphere, and negative in the Southern Hemisphere.
46

Figure 6. January 1996 difference between CLAVR-x and CLAVR-1 for the ascending anddescending orbits of NOAA-14.
47
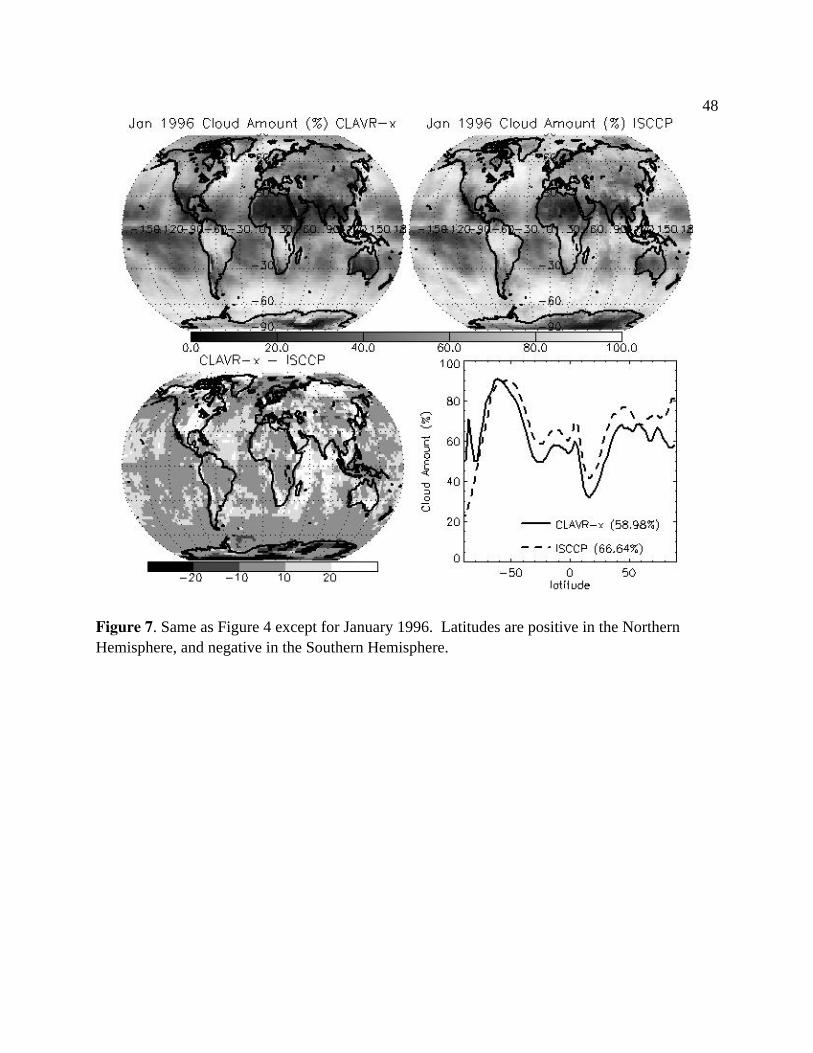
Figure 7. Same as Figure 4 except for January 1996. Latitudes are positive in the NorthernHemisphere, and negative in the Southern Hemisphere.
48

Figure 8. January 1996 zonal mean cloud amount from CLAVR-x (average of NOAA-14 and
NOAA-12), CLAVR-1, ISCCP, APP, and UW-HIRS. Latitudes are positive in the Northern
Hemisphere, and negative in the Southern Hemisphere.
49

Figure 9. Same as Figure 4 except fields shown for the cloud amount differences between July
1995 and January 1996. Latitudes are positive in the Northern Hemisphere, and negative in the
Southern Hemisphere.
50

Figure 10. Comparison of NOAA-16/CLAVR-x and TERRA/MODIS daytime cloud amounts
for April 1-8, 2003.. Upper left image shows the CLAVR-x cloud amount. Upper right shows
the MODIS cloud amount. Lower left is the difference (MODIS – CLAVR-x). Lower right
shows a comparison of the zonal averages of CLAVR-x and MODIS. Global mean cloud
amounts are given in parentheses in the lower right plot. Latitudes are positive in the Northern
Hemisphere, and negative in the Southern Hemisphere.
51

List of Tables
Table 1. Summary of the cloud masks used for each type of comparison, and the time periods
encompassed.
Table 2. Approximate daytime equator crossing times.
Table 3. July 1995 CLAVR-1 vs. CLAVR-x comparative statistics, for the average over the
ascending and descending orbits of NOAA-14.
Table 4. Total global cloud amount for July 1995 and Jan. 1996.
Table 5. Percentage of cloud mask for each cloud classification. Mean and standard deviation
are calculated over 7 random ascending orbits of NOAA-14, in July 1995.
Table 6. July 1995 ISCCP vs. CLAVR-x comparative statistics. CLAVR-x cloud mask data are
averaged over the ascending and descending orbits of either NOAA-12 or NOAA-14.
Table 7. January 1996 CLAVR-1 vs. CLAVR-x comparative statistics, for the average over the
ascending and descending orbits of NOAA-14.
52

Table 8. January 1996 ISCCP vs. CLAVR-x comparative statistics. CLAVR-x cloud mask data
are averaged over the ascending and descending orbits of either NOAA-12 or NOAA-14.
Table 9. Average of April 1-8, 2003 Terra MODIS vs. CLAVR-x comparative statistics, for the
average over the ascending and descending orbits of NOAA-14.
53

Table 1. Summary of the cloud masks used for each type of comparison, and the time periodsencompassed.
Month Statistical Comparison
(spatial resolution)
Zonal Comparison
(spatial resolution)
July 1995 CLAVR-x to CLAVR-1 (1 degree)
CLAVR-x to ISCCP (2.5 degree)
CLAVR-x (1 or 2.5 degree)
CLAVR-1 (1 degree)
UW-HIRS (2.5 degree)
APP (2.5 degree)
ISCCP (2.5 degree)
January 1996 CLAVR-x to CLAVR-1 (1 degree)
CLAVR-x to ISCCP (2.5 degree)
CLAVR-x (1 or 2.5 degree)
CLAVR-1 (1 degree)
UW-HIRS (2.5 degree)
APP (2.5 degree)
ISCCP (2.5 degree)
April 1-8 2003 None CLAVR-x (1 degree)
MODIS (1 degree)
54

Table 2. Approximate daytime equator crossing times
Daytime Equator Crossing
Time
NOAA-12 07:30 am
NOAA-14 04:30 pm
NOAA-16 01:30 pm
EOS-Terra 10:30 am
55

Table 3. July 1995 CLAVR-1 vs. CLAVR-x comparative statistics, for the average over the
ascending and descending orbits of NOAA-14.
NOAA-14 Global NOAA-14 60N-60SNOAA-14 poleward of
60N and 60S
S20 0.694 0.871 0.341
S-60 0.083 0.000 0.248
Sh 0.569 0.795 0.225
Srms 0.274 0.104 0.509
Sbias 0.080 -0.030 0.333
Sabs 0.170 0.079 0.384
56
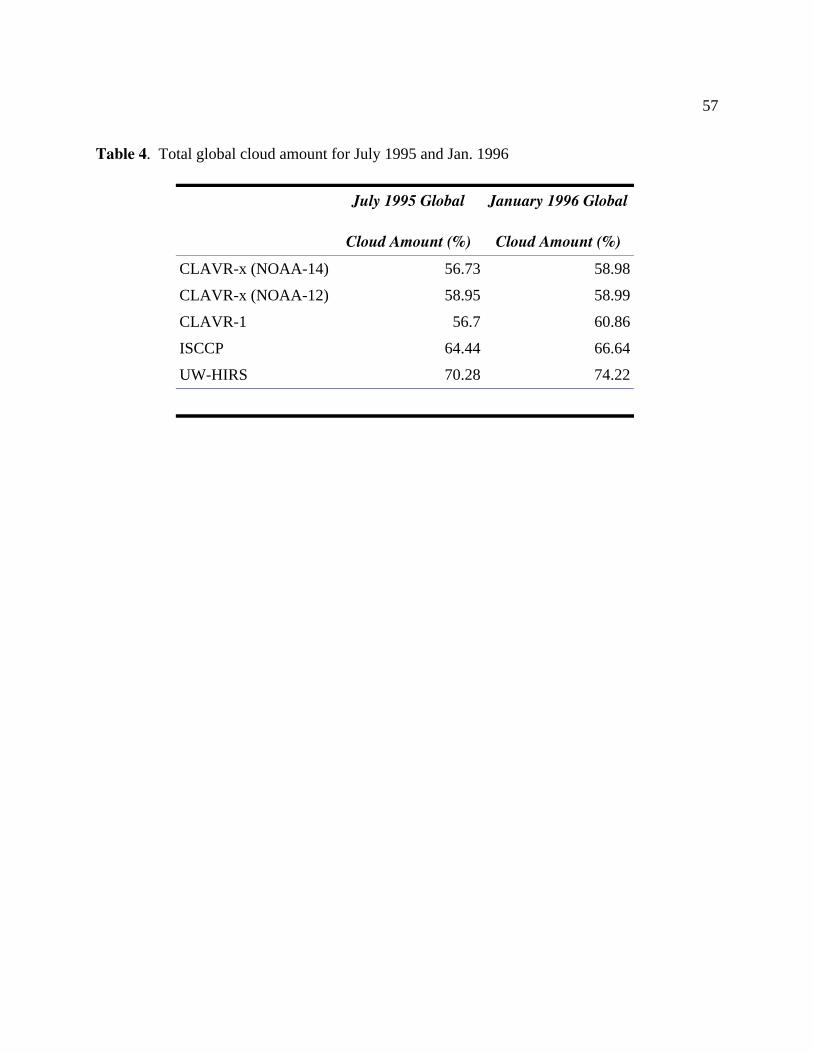
Table 4. Total global cloud amount for July 1995 and Jan. 1996
July 1995 Global
Cloud Amount (%)
January 1996 Global
Cloud Amount (%)
CLAVR-x (NOAA-14) 56.73 58.98
CLAVR-x (NOAA-12) 58.95 58.99
CLAVR-1 56.7 60.86
ISCCP 64.44 66.64
UW-HIRS 70.28 74.22
57

Table 5. Percentage of cloud mask for each cloud classification. Mean and standard deviation
are calculated over 7 random ascending orbits of NOAA-14, in July 1995.
Clear Mixed-
Clear
Mixed-
Cloudy
Cloudy
Mean (all clouds) 22.35 20.01 29.52 28.11
Standard Deviation
(all clouds) 2.64 1.47 2.53 1.64
Mean (water
clouds only) 13.07 23.48 31.14 32.43
Standard Deviation
(water clouds only) 1.29 2.09 2.43 2.12
58
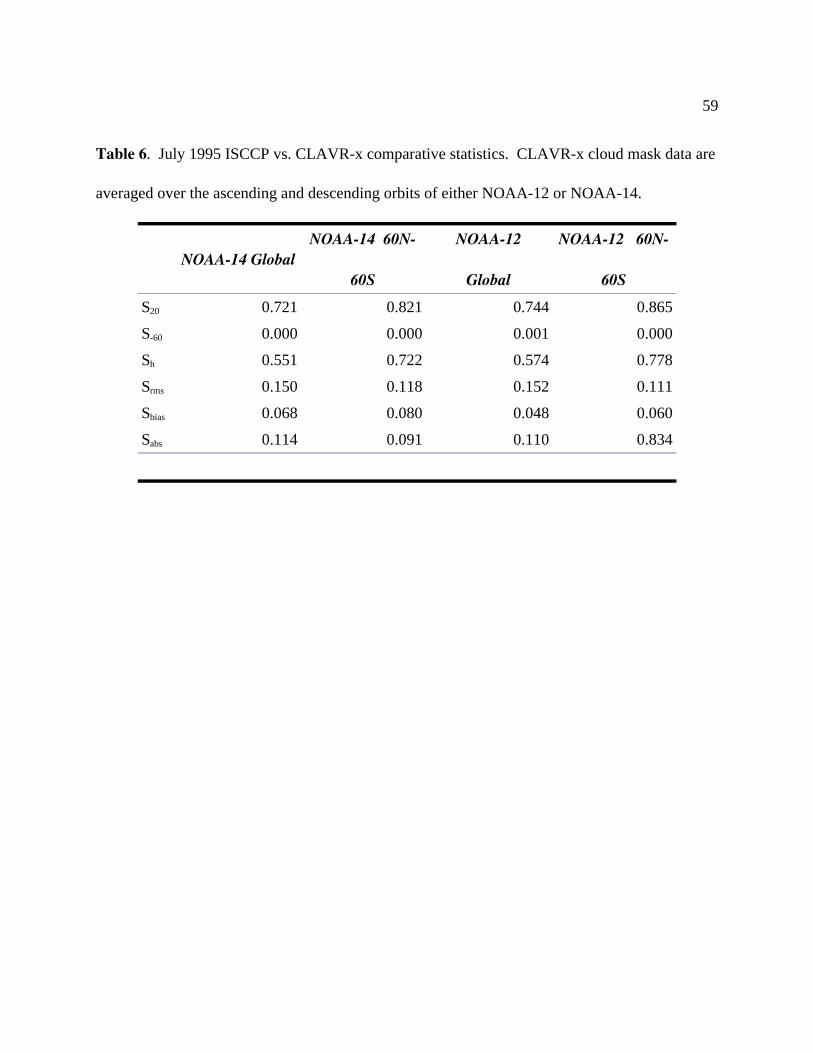
Table 6. July 1995 ISCCP vs. CLAVR-x comparative statistics. CLAVR-x cloud mask data are
averaged over the ascending and descending orbits of either NOAA-12 or NOAA-14.
NOAA-14 GlobalNOAA-14 60N-
60S
NOAA-12
Global
NOAA-12 60N-
60S
S20 0.721 0.821 0.744 0.865
S-60 0.000 0.000 0.001 0.000
Sh 0.551 0.722 0.574 0.778
Srms 0.150 0.118 0.152 0.111
Sbias 0.068 0.080 0.048 0.060
Sabs 0.114 0.091 0.110 0.834
59

Table 7. January 1996 CLAVR-1 vs. CLAVR-x comparative statistics, for the average over the
ascending and descending orbits of NOAA-14.
NOAA-14 Global NOAA-14 60N-60SNOAA-14 poleward of
60N and 60S
S20 0.633 0.823 0.255
S-60 0.034 0.006 0.090
Sh 0.477 0.713 0.170
Srms 0.240 0.142 0.628
Sbias 0.095 -0.005 0.492
Sabs 0.170 0.099 0.506
60

Table 8. January 1996 ISCCP vs. CLAVR-x comparative statistics. CLAVR-x cloud mask data
are averaged over the ascending and descending orbits of either NOAA-12 or NOAA-14.
NOAA-14 GlobalNOAA-14 60N-
60S
NOAA-12
Global
NOAA-12 60N-
60S
S20 0.738 0.819 0.738 0.827
S-60 0.009 0.000 0.008 0.000
Sh 0.583 0.720 0.589 0.728
Srms 0.162 0.122 0.165 0.120
Sbias 0.047 0.083 0.058 0.081
Sabs 0.116 0.094 0.119 0.093
61

Table 9. Average of April 1-8, 2003 Terra MODIS vs. CLAVR-x comparative statistics, for the
average over the ascending and descending orbits of NOAA-14.
NOAA-14 Global NOAA-14 60N-60S
S20 0.647 0.777
S-60 0.013 0.000
Sh 0.519 0.645
Srms 0.204 0.129
Sbias 0.088 0.067
Sabs 0.143 0.094
62