chapter 4 land cover/ land use mapping using wavelet...
TRANSCRIPT
72
CHAPTER 4
LAND COVER/ LAND USE MAPPING USING
WAVELET PACKET TRANSFORM
The images of land received from remote sensing satellites can be
used to derive information on vegetative cover, water bodies, land use pattern,
geological features, soil, etc. Land cover mapping is one of the most
important and typical applications of remote sensing data (image). Land cover
corresponds to the physical condition of the ground surface, for example,
forest, grassland, etc., while land use reflects human activities such as the use
of the land, for example, industrial zones, residential zones, agricultural
fields, etc.
Generally, land cover does not coincide with land use. Land cover
refers to features of land surface, which may be natural, semi-natural,
managed or manmade. They are directly observable by a remote sensor.
A land use class is composed of several land covers, for example, a residential
land use class not only contains built-up class but also contains vegetation
class, water class, etc. The properties measured with remote sensing
techniques relate to land cover, from which land use can be inferred,
particularly with ancillary data or a prior knowledge. Land cover mapping
serves as a basic inventory of land resources for all levels of government,
environmental agencies and private industry throughout the world.
Texture in high resolution satellite images requires substantial
amendment in the conventional segmentation algorithms. This work
73
examined and evaluated the use of wavelet packet transforms for texture
analysis and image classification in high spatial resolution LISS IV imagery.
In this chapter, performance of the combination of WPSFs and WPCFs for the
classification of LISS IV images is discussed. Based on the four indices
(user�s accuracy, producer�s accuracy, overall accuracy and kappa co-
efficient) the accuracy of the classified data is presented.
4.1 PRE PROCESSING
In this work, the advantages of WPT are explored by incorporating
it as a pre-processor for classification. The wavelet packet decomposition is a
generalization of the classical wavelet decomposition and it offers a richer
signal analysis. Here, different wavelet filters such as, Daubechies2 (db2),
Symlet2 (sym2), Coiflet2 (coif2) and Biorthogonal2.2 (bior2.2) wavelet filters
were used for the decomposition of Benchmark (Ahmedabad city) as well as
for the Madurai city. WPT split up the high and low frequencies in equal
bands. The values or transformed co-efficient in detail images are the
essential features useful for texture analysis and discrimination. As micro
textures or macro textures have non-uniform gray level variations, they are
statistically characterized by the features in detail images. In other words, the
features derived from detail images uniquely characterize a texture.
The choice of the H and G filters and its order depends on the
wavelet family used and it varies for different applications. In the proposed
scheme, two levels of wavelet packet decomposition are performed using
different wavelet families as shown in Figure 2.5. The second level of
decomposition provides 16 wavelet coefficient matrices, which represent
quite a huge amount of information (equal to the size of the input image).
It is well known that, as the complexity of a classifier grows rapidly with the
number of dimensions of the pattern space, it is important to take decisions
only on the most essential, so-called discriminatory information, which is
74
conveyed by the extracted features. Each of the 16 coefficient matrices
contains information about the texture of the image.
4.2 PROPOSED SYSTEM
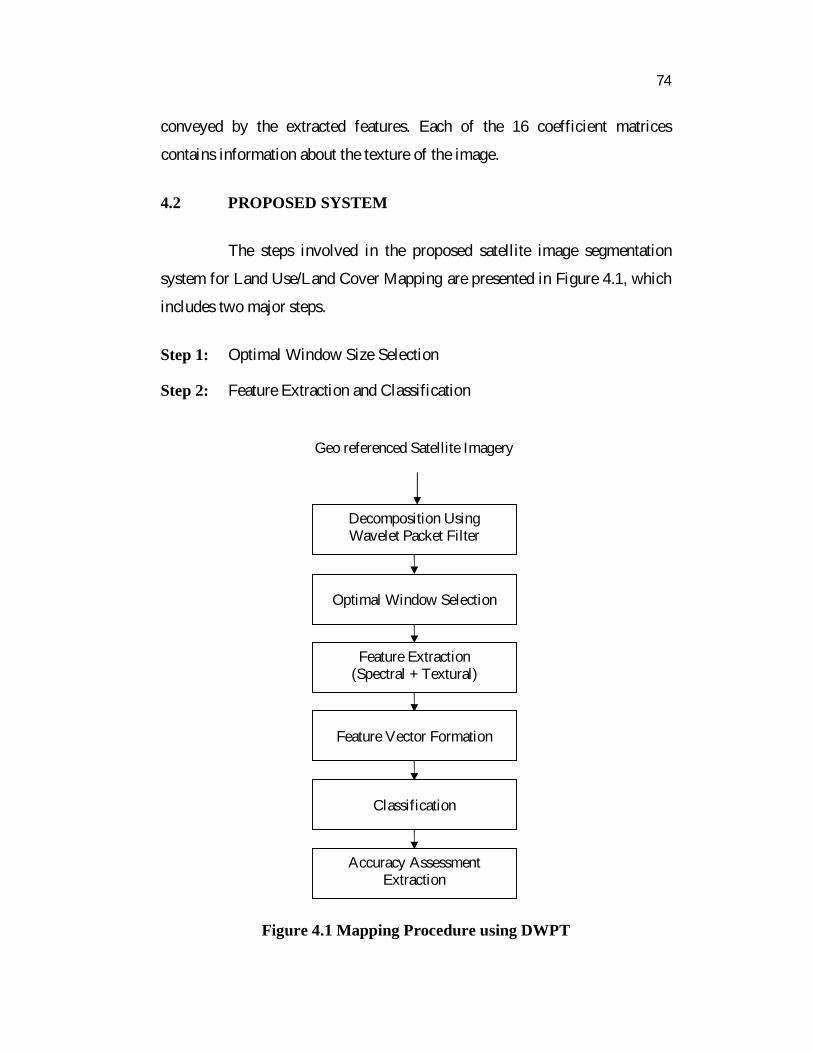
The steps involved in the proposed satellite image segmentation
system for Land Use/Land Cover Mapping are presented in Figure 4.1, which
includes two major steps.
Step 1: Optimal Window Size Selection
Step 2: Feature Extraction and Classification
Figure 4.1 Mapping Procedure using DWPT
Decomposition Using Wavelet Packet Filter
Feature Extraction (Spectral + Textural)
Optimal Window Selection
Accuracy Assessment Extraction
Feature Vector Formation
Classification
Geo referenced Satellite Imagery

75
4.2.1 Optimal Window Size Selection
The success of the classification procedure using textural measures
depends largely on the selected window size (Pesaresi and Benediktsson
2001). Indeed, if the window size is too small, insufficient spatial information
is extracted to characterize a specific land cover and if the window size is too
large, it can overlap two types of ground cover and thus introduce erroneous
spatial information. Therefore, window size for texture analysis is related to
image resolution and the contents within the image. A Geostatistical analysis
indicated that there was no single window size that would adequately
characterize the range of textural conditions that are present in remotely
sensed images (Puissant et al., 2005; Huang et al., 2007). The size of the
processing window is an important issue for spatial feature extraction and
classification of High Resolution satellite imagery. An automatic analysis
system capable of choosing the optimal window size adaptively based on the
multispectral and edge information around the central pixel will greatly
enhance the Classification Accuracy.
Table 4.1 Window Size vs Overall Accuracy
Window Size Overall Accuracy (%)
3 66.78
5 76.96
7 87.6
9 76.00
11 68.90
13 66.00
To facilitate the choice of an optimal texture window, the
coefficient of variation of each texture measure for each thematic class in

76
relation to window size was described (Puissant et al 2005). The chosen
optimal window size is that from which the value of the coefficient of
variation starts to stabilize while having the smallest value (Anys et al 1994).
Therefore, each texture measure identified with its optimal window size is
added in the classification procedure.
Figure 4.2 Window Size vs Overall Accuracy
In this section optimal texture window sizes of different texture
measures are investigated on the test data. By comparing the classification
results for the six window sizes 3 × 3, 5 × 5, 7 × 7, 9 × 9, 11x11 and 13 x13,
as illustrated in Table 4.1 and in Figure 4.2, the highest accuracy is obtained
by the 7 ×7 window. However, it is worth noting that, among the six window
sizes, not all of the information classes reach their highest accuracies with the
7 × 7 window. Larger window with 7 × 7, obtain higher accuracies for
Vegetation and Water Body; however, poor results are obtained for Urban and
Waste land. It seems that the larger window size is reliable for homogeneous
and extensive objects. The 5 × 5 window acquires the highest accuracy for the
Waste land and 3 x 3 windows acquires the highest accuracy for Urban area,
which implies the smaller window size is reliable for heterogeneous regions
or narrow objects. Though a fixed window size is not the most effective for
different information classes, the overall accuracy is higher for the window

77
size 7x7. Moreover, Puissant et al (2005), noted that too small of a window
size results in insufficient information, whereas too large of a window may
overlap multiple features which may introduce erroneous spatial information
and observed that a 7x7 window worked best with high spatial resolution
imagery. Hence, it is chosen as optimal window size for our implementation.
4.2.2 Feature Extraction
Feature extraction is the key for pattern recognition. It is arguably
the most important component in the design of an intelligent system based on
pattern recognition. Even the best classifier will perform poorly if the
features are not chosen well. To select the appropriate features, a number of
experiments were conducted with different features and the results are shown
in the Figures 4.3 to 4.6.
Figure 4.3 Feature vs Producer Figure 4.4 Feature vs Kappa
Figures show that Entropy gives the better results for Overall,
kappa and User accuracy indices and nearer value for Producer accuracy
compared to the others. In order to increase the accuracy further, number of
experiments were conducted with different combinations of features such that
entropy combined with energy, entropy combined with energy and contrast,

78
entropy combined with energy, contrast and correlation, entropy combined
with energy, contrast, correlation and cluster shade, entropy combined with
energy, contrast, correlation, cluster shade and cluster prominence, entropy
combined with energy, contrast, correlation, cluster shade, cluster prominence
and homogeneity.
Experimental results show that the combination of textural features
� entropy (Er), energy (En), contrast (Con), correlation (Cor), cluster shade
(Cs), cluster prominence (Cp) and homogeneity (Hom) greatly improved the
classification results. That is, by using the seven textural features, the
Producer accuracy has increased from around 85.1% to 89.57%, the Kappa
coefficient has increased from 0.78 to 0.82, User accuracy has increased from
82.29% to 82.5% and the overall classification accuracy also has increased
from 84.87% to 87.6 %. The steps involved in texture training and texture
classification are Discrete Wavelet Packet Decomposition (DWPD), wavelet
packet statistical features and wavelet packet co-occurrence features
extraction, spectral feature (NDVI) extraction, feature storage and
classification based on Mahalanobis distance criteria.
Figure 4.5 Feature vs User Figure 4.6 Feature vs Overall
79
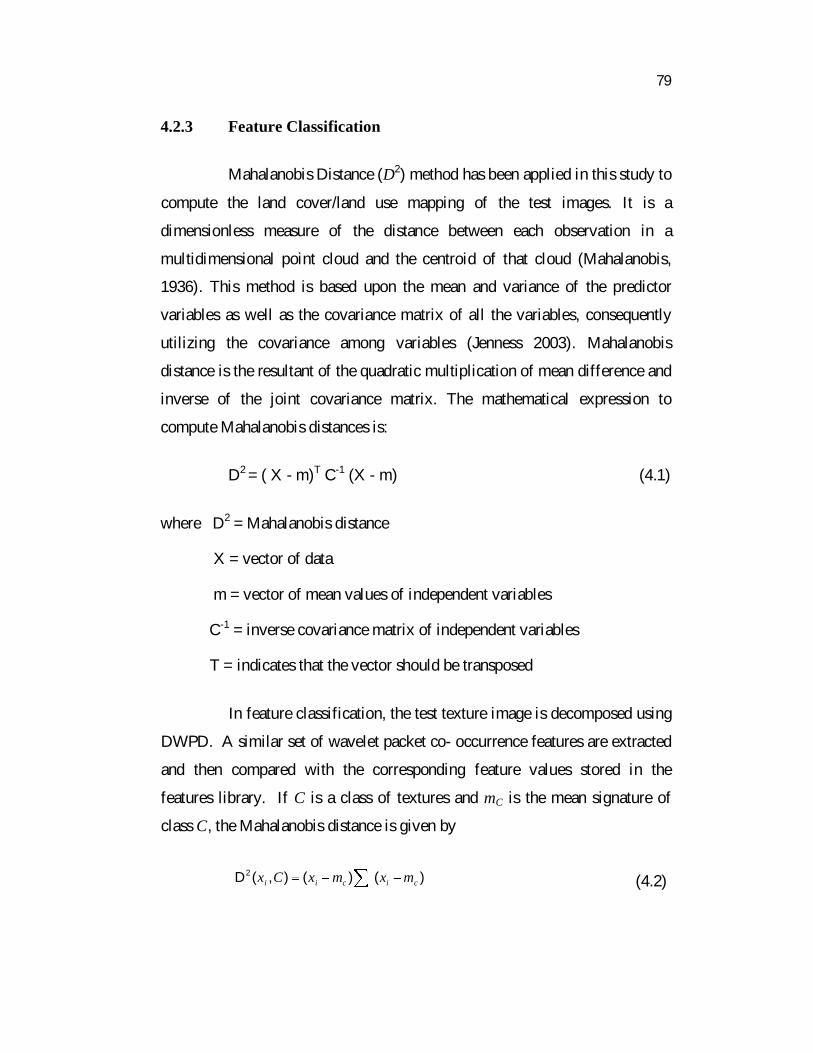
4.2.3 Feature Classification
Mahalanobis Distance (D2) method has been applied in this study to
compute the land cover/land use mapping of the test images. It is a
dimensionless measure of the distance between each observation in a
multidimensional point cloud and the centroid of that cloud (Mahalanobis,
1936). This method is based upon the mean and variance of the predictor
variables as well as the covariance matrix of all the variables, consequently
utilizing the covariance among variables (Jenness 2003). Mahalanobis
distance is the resultant of the quadratic multiplication of mean difference and
inverse of the joint covariance matrix. The mathematical expression to
compute Mahalanobis distances is:
D2 = ( X - m)T C-1 (X - m) (4.1)
where D2 = Mahalanobis distance
X = vector of data
m = vector of mean values of independent variables
C-1 = inverse covariance matrix of independent variables
T = indicates that the vector should be transposed
In feature classification, the test texture image is decomposed using
DWPD. A similar set of wavelet packet co- occurrence features are extracted
and then compared with the corresponding feature values stored in the
features library. If C is a class of textures and mC is the mean signature of
class C, the Mahalanobis distance is given by
)()(),(D2cicii mxmxCx (4.2)
80
where is the empirical covariance matrix of x on class C. The test texture
image is classified as ith texture, if the distance D(i) is minimum among all
textures, available in the library.
4.3 EXPERIMENTAL RESULTS AND DISCUSSION
Analysis of confusion matrix has been one of the most common
means of expressing classification accuracy. Error matrices compare, on a
category by category basis, the relationship between known reference data
(ground truth) and the corresponding results of an automated classification.
Various accuracy indices (Lillesand et al 2004) have been calculated using the
field visit data in determining the accuracy of classification. The user
accuracy, i.e., the percentage of correctly classified pixel to the total number
of pixels belonging to that particular class (Fung 1990) is widely used as the
standard measure for accuracy.
4.3.1 Results on Benchmark Image
The experimental results of the classification procedure on the
benchmark data is discussed here. The supervised classification procedure
has been experimented with the wavelet packet texture features and spectral
feature. The satellite imagery used as benchmark image corresponds to areas
in and around Ahmedabad city. The image is a part of IRS P6 LISS IV
imagery which has a spatial resolution of 5.8 metres. The feature database is
created using WPSFs, WPCFs and NDVI.
To demonstrate the effectiveness of the proposed technique
different wavelet filters such as db2, sym2, coif2 and bior2.2 wavelet filters
were used for classification of Ahmedabad city. A total of 3550 random
sample image regions were taken for training. Tables 4.2-4.5 shows the
results obtained by comparing the reference map with the classified map, for

81
db2, sym2, coif2 and bior2.2 wavelets and the results are summarized in
Table 4.6. Classified results of the image corresponding to different regions
using db2, sym2, coif 2 and bior2.2 wavelets are illustrated in Figure 4.7.
Table 4.2 Confusion Matrix for Ahmedabad City Image using db2
Cla
ssifi
ed D
ata
Number of
Samples
Reference Data
VegWaterbody
Urban Land
Vegetation 9628 9039 112 477 0
Water body 16563 1361 14952 233 17
Urban 53228 796 2419 48941 1072
Land 7017 53 194 5437 1333
User Accuracy :77.34 Producer Accuracy : 76.91
Overall Accuracy : 83.3 Kappa Coefficient : 0.69
Table 4.3 Confusion Matrix for Ahmedabad City Image using sym2
Cla
ssifi
ed D
ata
Number of
Samples
Reference Data
VegWater body
Urban Land
Vegetation 9628 9322 65 241 0
Water body 16563 1418 13355 1787 3
Urban 53228 1337 5028 46526 337
Land 7017 120 361 6137 399
User Accuracy :67.63 Producer Accuracy : 71.62
Overall Accuracy : 80.52 Kappa Coefficient : 0.65
82
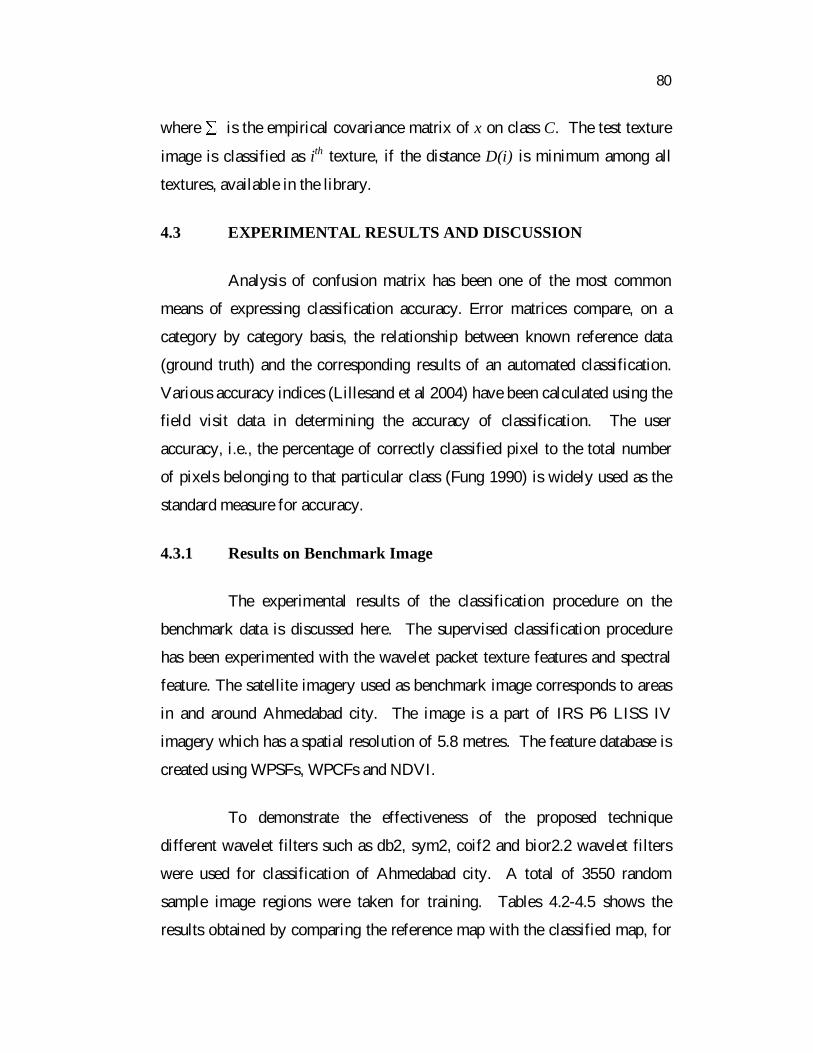
Table 4.4 Confusion Matrix for Ahmedabad City Image using coif2
Cla
ssifi
ed D
ata
Number of
Samples
Reference Data
VegWaterbody
Urban Land
Vegetation 9628 9532 89 7 0
Water body 16563 1361 14952 233 17
Urban 53228 2586 15479 31688 3475
Land 7017 147 1066 3225 2579
User Accuracy :71.39 Producer Accuracy : 62.47
Overall Accuracy : 68.0 Kappa Coefficient : 0.52
Table 4.5 Confusion Matrix for Ahmedabad City Image using bior2.2
Cla
ssifi
ed D
ata
Number of
Samples
Reference Data
VegWater body
Urban Land
Vegetation 9628 9388 39 198 3
Water body 16563 2013 10477 4058 15
Urban 53228 1927 1755 46874 2672
Land 7017 189 122 4353 2353
User Accuracy :70.34 Producer Accuracy : 71.28
Overall Accuracy : 79.93 Kappa Coefficient : 0.64

83
Table 4.6 Results of Different WPT’s for Ahmedabad City
Accuracy Indices
Overall User Producer Kappa
db2 83.3 77.34 76.91 0.69
sym2 80.52 67.63 71.62 0.65
coif2 68.0 71.39 62.47 0.52
bior2.2 79.93 70.34 71.28 0.64
Figure 4.7 Classified Output (a) bior2.2 (b) sym2 (c) db2 (d) coif2
Legend
(a) (b)
(c) (d)
UrbanVegetation Water Body
Land

84
4.3.2 Results on Madurai Image
The above experimental study was carried for LISS IV Madurai
image. A Total of 3550 random sample image regions were taken for training.
For testing, 500 samples were selected randomly from the study area. The
500 samples (pixels) chosen for the experimental study comprises 131, 216,
56, 59, 10 and 4 pixels of urban, vegetation, water body, waste land, tank and
saline land samples, respectively. The 7×7 window size has been used to
extract different wavelet packet co-occurrence based texture features.
The feature set is derived from the original image, all sub bands of
first level of decomposition combined with the features of second level
approximation [A (2, 0)] sub band. The confusion matrices obtained from the
classification results for different wavelet filters are shown in Tables 4.7- 4.11.
Table 4.7 Confusion Matrix for Madurai Image using db2
Cla
ssifi
edD
ata
Numberof
Samples
Reference Data
Urban Veg. Waterbody
Wasteland Tank Saline
LandUrban 131 125 1 1 3 1 0
Vegetation 216 17 189 8 2 0 0
Waterbody 56 0 1 55 0 0 0
WasteLand 59 20 2 1 36 0 0
Tank 10 0 0 0 0 10 0 SalineLand 4 1 1 0 0 0 2
85
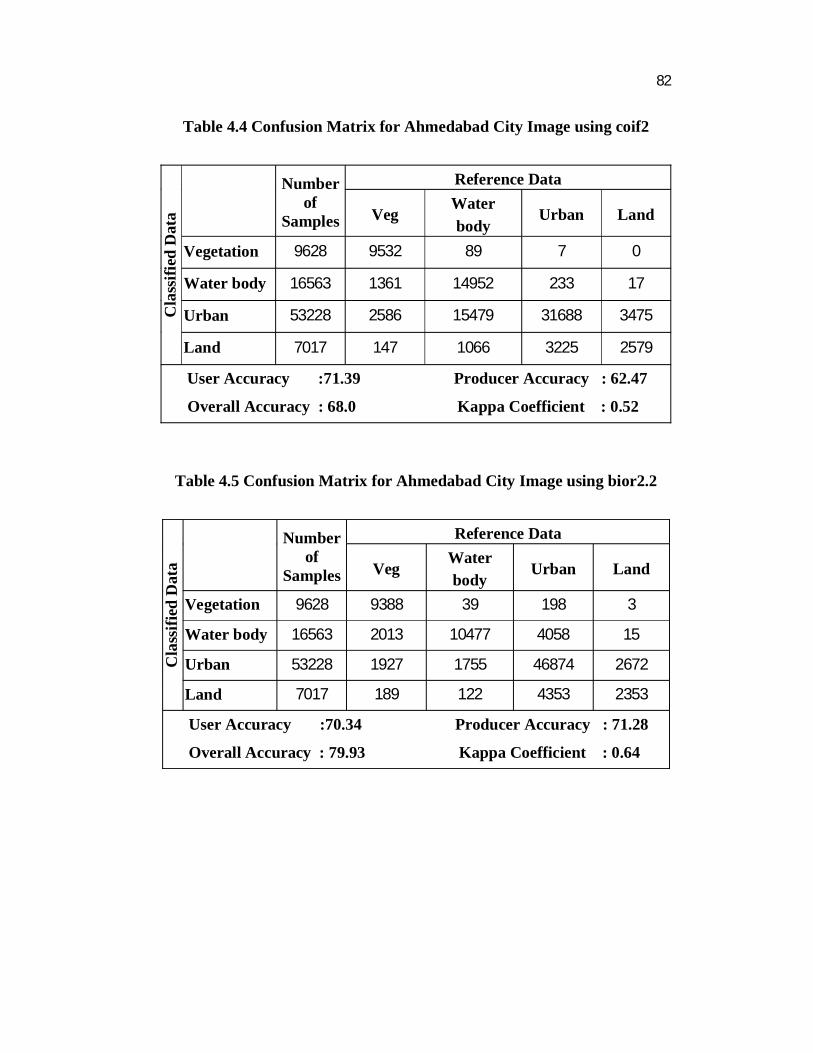
Table 4.8 Confusion Matrix for Madurai Image using sym2 C
lass
ified
Dat
a
Number of
Samples
Reference Data
Urban Veg. Water body
Wasteland Tank Saline
LandUrban 131 96 28 1 4 0 2 Vegetation 216 6 180 5 25 0 0 Waterbody 56 0 4 51 1 0 0
WasteLand 59 10 13 0 36 0 0
Tank 10 0 0 0 0 10 0 SalineLand 4 1 1 0 0 0 2
Table 4.9 Confusion Matrix for Madurai Image using coif2
Cla
ssifi
ed D
ata
Number of
Samples
Reference Data
Urban Veg. Water body
Wasteland Tank Saline
LandUrban 131 96 25 1 4 0 2 Vegetation 216 13 179 7 15 0 2 Waterbody 56 0 4 52 0 0 0
WasteLand 59 15 12 1 30 0 1
Tank 10 1 0 0 0 9 0 SalineLand 4 1 1 0 0 0 2
86
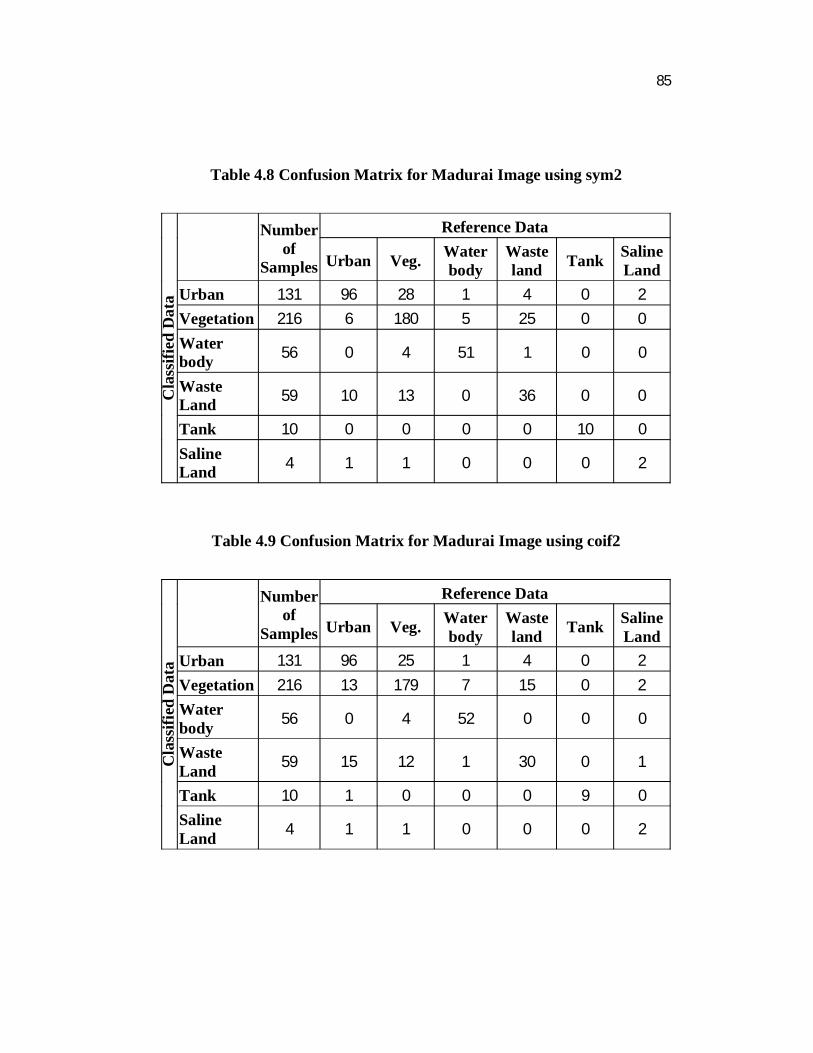
Table 4.10 Confusion Matrix for Madurai Image using bior2.2
Cla
ssifi
ed D
ata
Number of
Samples
Reference Data
Urban Veg. Water body
Wasteland Tank Saline
LandUrban 131 90 34 1 2 0 4 Vegetation 216 8 190 4 14 0 0 Waterbody 56 0 6 50 0 0 0
WasteLand 59 12 12 1 34 0 0
Tank 10 0 0 0 0 10 0 SalineLand 4 0 1 0 0 0 3
Table 4.11 Results of Different WPT’s for Madurai City
WaveletFilter
Accuracy Indices
Overall User Producer Kappa
db2 87.60 82.02 89.57 0.82
sym2 78.78 76.45 76.43 0.69
coif2 77.3 73.3 70.6 0.67
bior2.2 79.2 79.76 76.69 0.69
The confusion matrix tables are utilized to derive the accuracy
indices like overall, user, producer and kappa accuracies for the different
wavelet filters used in the proposed method. The comparison of sample
pixels classification of the image corresponding to different regions using
db2, sym2, coif2 and bior2.2 Wavelets is illustrated in Figures 4.8 and 4.9.

87
(a) (b)
Figure 4.8 Sample Pixels Classification using Different Wavelet Filters
Figure 4.9 Classified Output using (a) bior2.2 (b) sym2 (c) db2 (d) coif2 (e) db2 without NDVI

88
(c)(d)
(e)
Figure 4.9 (Continued)
4.4 SUMMARY
Daubechies2, Symlet2, Coiflet2 and Biorthogonal2.2 wavelets were
used in this study for land cover/ land use mapping using high resolution
LISS IV imagery. Daubechies wavelets are compactly supported wavelets
with extremal phase and highest number of vanishing moments for a given
support width. Associated scaling filters are minimum-phase filters. Symlets
wavelets are compactly supported wavelets with least asymmetry and highest
89
number of vanishing moments for a given support width. Associated scaling
filters are near linear-phase filters. Coiflets wavelets are compactly supported
wavelets with highest number of vanishing moments for both phi and psi for a
given support width. Biorthogonal wavelets are compactly supported
biorthogonal spline wavelets for which symmetry and exact reconstruction are
possible with FIR filters (in orthogonal case it is impossible except for Haar).
Experiments were done using the benchmark (Ahmedabad City)
and Madurai images for optimal window selection. From the experimental
results, as shown in Table 4.1, a window size of 7 x 7 is observed to be the
better option to measure the different wavelet packet co-occurrence based
texture features. The results obtained provide a higher classification rate of
87.6% which is obtained for the feature set comprising wavelet packet
statistical features, mean and standard deviation and a set of wavelet packet
co-occurrence features contrast, energy, entropy, local homogeneity, cluster
shade, cluster prominence and correlation derived from the original, first level
of decomposition combined with the features of second level approximation
[A(2,0)] sub band. In this work, the samples were selected randomly from the
homogenous texture regions. Also this work confirms the utility of both
textural and spectral analysis to enhance the per-pixel classification accuracy
for high resolution images, especially in urban areas where the images are
spectrally more heterogeneous. Though, different wavelets perform better for
different applications, from the empirical analysis of the experimental results
obtained for the benchmark (Ahmedabad) and Madurai images, it is observed
that Daubechies2 capture features of satellite imagery in a better manner
compared to other wavelets.