chapter 2 operating system overview - · pdf fileserial processing • no operating ......
TRANSCRIPT

Chapter 2Operating System
OverviewSeventh Edition
By William Stallings
Operating Systems:Internals
and Design
Principles

• A program that controls the execution of application programs
Operating System
Main objectives of an OS:
• Convenience• Efficiency• Ability to evolve

• Program development• Program execution• Access I/O devices• Controlled access to files• System access• Error detection and
response• Accounting
Operating System Services

• Phase 0 — hardware is a very expensive; no operating systems exist
One user at console• One function at a time (computation, I/O,user think/response)• Program loaded via card deck
– Libraries of device drivers (for I/O)
• User debugs at console
History
Serial ProcessingSerial Processing
• No operating system• programmers interacted
directly with the computer hardware
• Computers ran from a console with display lights, toggle switches, some form of input device, and a printer
• Users have access to the computer in “series”
• Scheduling:– most installations used a
hardcopy sign-up sheet to reserve computer time
– time allocations could run short or long, resulting in wasted computer time
• Setup time– considerable amount of
time was spent just on setting up the program to run
• Earliest Computers: • Problems:
Phase 1 — hardware is expensive , humans are cheapSimple batch processing: load program , run, print results,
dump, repeat
• User gives program (cards or tape) to the operator, who schedules the jobs
• Resident monitor automatically loads, runs, dumps user jobs
• Requires memory management (relocation) and protection
• More efficient use of hardware, but debugging is more difficult (from dumps)
History

Phase 1 — hardware is expensive , humans are cheapOverlapped CPU & I/O operations• First: buffer slow I/O onto fast tape drives connected to
CPU, replicate I/O devices• Later: spool data to disk
History
•bring cards to 1401•read cards to tape offline•put tape on 7094 which does computing•put tape on 1401 which prints output offline
Phase 1 — hardware is expensive , humans are cheapMultiprogrammed batch systemsMultiple jobs are on the disk, waiting to runMultiprogramming — run several programs at the “same”
time– Pick some jobs to run (scheduling), and put them in
memory (memory management)– Run one job; when it waits on something(tape to be mounted, key to be pressed),switch to another job in memory
History
Multiprogrammed Batch Systems
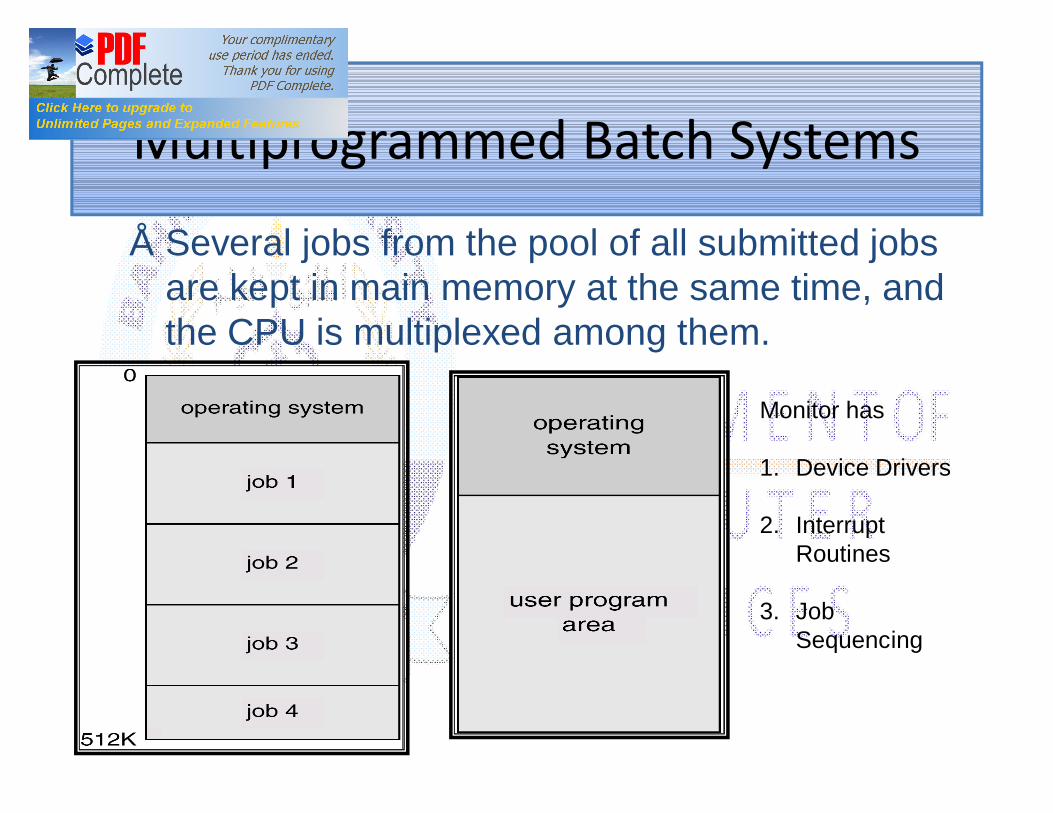
• Several jobs from the pool of all submitted jobs are kept in main memory at the same time, and the CPU is multiplexed among them.
Monitor has
1. Device Drivers
2. Interrupt Routines
3. Job Sequencing

Phase 2 — hardware is less expensive than before, humans are expensive
Interactive timesharing• Lots of cheap terminals, one computer
– All users interact with system at once– Debugging is much easier
• Disks are cheap, so put programs and data online– 1 punch card = 100 bytes– 1MB = 10K cards– OS/360 was several feet of cards
History

Phase 2 — hardware is less expensive than before, humans are expensive
Interactive timesharingNew problems:
– Need preemptive scheduling to maintain adequate response time
– Need to avoid thrashing (swapping programs in and out of memory too often)
– Need to provide adequate security measuresSuccess: UNIX developed at Bell Labs so a couple of computer nerds
(Thompson, Ritchie) could play Star Trek on an unused PDP-7 minicomputer
History
Phase 3 — hardware is very cheap, humans are expensivePersonal computing• CPUs are cheap enough to put one in each terminal, yet
powerful enough to be useful– Computers for the masses!
• Return to simplicity; make OS simpler by getting rid of support for multiprogramming, concurrency, and protection
History
OS Features Needed for Multiprogramming
Why multiprogramming?üIncreases CPU utilization by trying to always
keep the CPU busy processing some jobüI/O of one job causes switch to another job
•Memory management – the system must allocatethe memory to several jobs.
•CPU scheduling – the system must choose amongseveral jobs ready to run.
•Allocation of devices.


Parallel Systems
• Multiprocessor systems with more than on CPU in close communication.
• Tightly coupled system – processors share memory and a clock; communication usually takes place through the shared memory.
• Advantages of parallel system: – Increased throughput with more processors– Economical – share peripherals, mass storage, power etc. as
opposed to individual PCs– Increased reliability
• graceful degradation / fault tolerant– failure of one processor will slow down but not halt the system– other processors pick up the slack
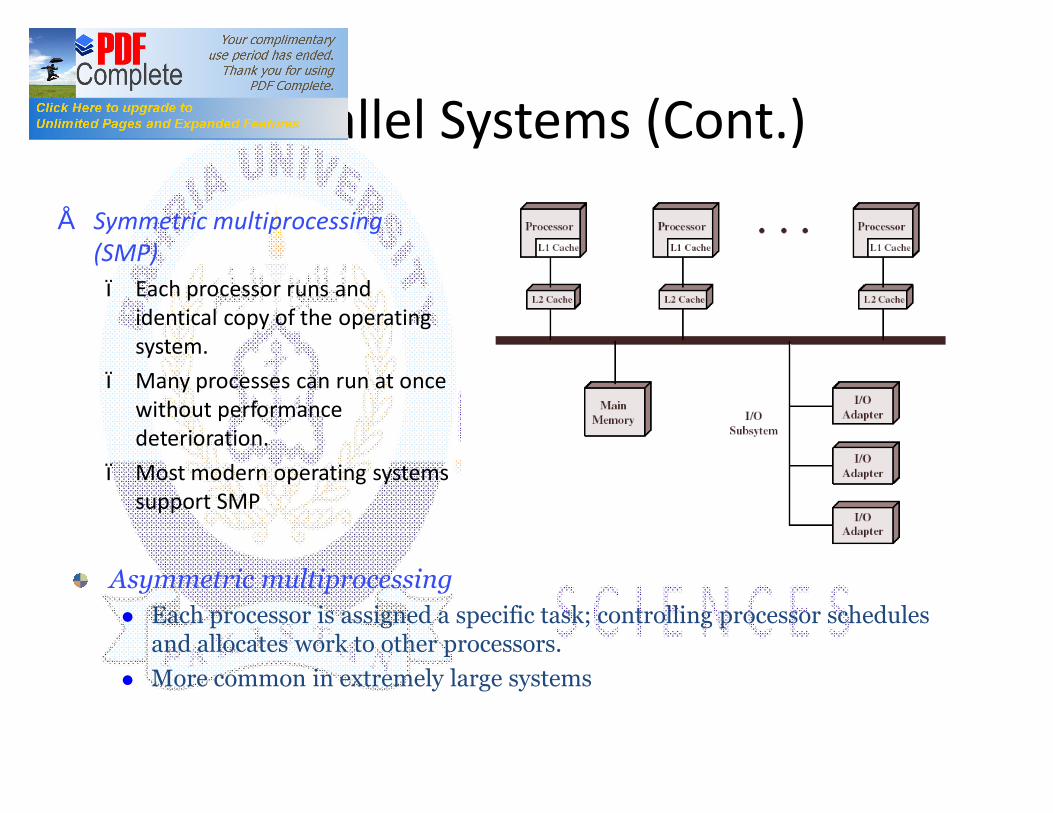
Parallel Systems (Cont.)• Symmetric multiprocessing
(SMP)– Each processor runs and
identical copy of the operating system.
– Many processes can run at once without performance deterioration.
– Most modern operating systems support SMP
Asymmetric multiprocessingl Each processor is assigned a specific task; controlling processor schedules
and allocates work to other processors.l More common in extremely large systems
• Distribute the computation among several physical processors.• Loosely coupled system – each processor has its own local
memory; processors communicate with one another through various communications lines, such as high-speed buses or telephone lines.
• Advantages of distributed systems.– Resource sharing – Computation speed up – load sharing – Reliability– Communications between processors and processes
Distributed Systems

• Often used as a control device in a dedicated application such as controlling scientific experiments, medical imaging systems, industrial control systems, and some display systems.
• Well-defined, fixed time constraints.• Hard real-time:
– Secondary storage limited or absent, data stored in short term memory, or read-only memory (ROM)
– Not supported by general-purpose operating systems.
• Soft real-time– Limited utility in industrial control of robotics– Useful in applications (multimedia, virtual reality) requiring advanced
operating-system features.
Real-Time Systems
Handheld Systems• Personal Digital Assistants (PDAs)• Cellular telephones• Issues:
– Limited memory (512KB to 8MB) requires efficient management
– Slow processors– Small display screens.

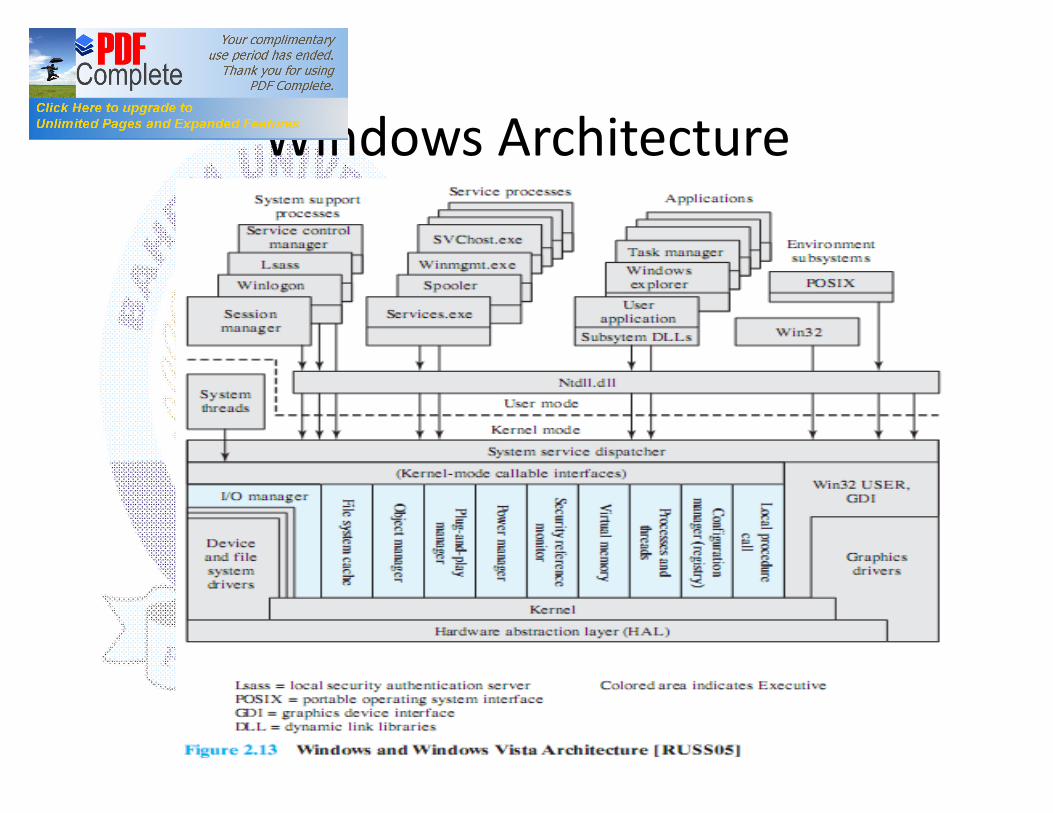
Kernel-Mode Components of Windows
Executivecontains the core OS services
Kernelcontrols execution of the processors
Hardware Abstraction Layer (HAL)maps between generic hardware commands and responses and those unique to a specific platform
Device Driversdynamic libraries that extend the functionality of the Executive
Windowing and Graphics Systemimplements the GUI functions
Microsoft Windows OverviewMicrosoft Windows OverviewMicrosoft Windows OverviewMicrosoft Windows Overviewn MS-DOS 1.0 released in 1981n 4000 lines of assembly language
source coden ran in 8 Kbytes of memoryn used Intel 8086 microprocessor
n Windows 3.0 shipped in 1990n 16-bitn GUI interfacen implemented as a layer on top of
MS-DOS
n Windows 95n 32-bit versionn led to the development of Windows
98 and Windows Me
n Windows NT (3.1) released in 1993n 32-bit OS with the ability to support
older DOS and Windows applications as well as provide OS/2 support
n Windows 2000n included services and functions to
support distributed processingn Active Directoryn plug-and-play and power-
management facilities
n Windows XP released in 2001n goal was to replace the versions of
Windows based on MS-DOS with an OS based on NT
n Windows Vista shipped in 2007
n Windows Server released in 2008
n Windows 7 shipped in 2009, as well as Windows Server 2008 R2
n Windows Azuren targets cloud computing
• Were developed at Bell Labs and became operational on a PDP-7 in 1970• Incorporated many ideas from Multics• PDP-11was a milestone because it first showed that UNIX would be an OS for all
computers• Next milestone was rewriting UNIX in the programming language C
• demonstrated the advantages of using a high-level language for system code
• Was described in a technical journal for the first time in 1974
• First widely available version outside Bell Labs was Version 6 in 1976
• Version 7, released in 1978 is the ancestor of most modern UNIX systems
• Most important of the non-AT&T systems was UNIX BSD (Berkeley Software Distribution)
Traditional UNIX SystemsTraditional UNIX Systems


Traditional UNIX SystemsTraditional UNIX Systems

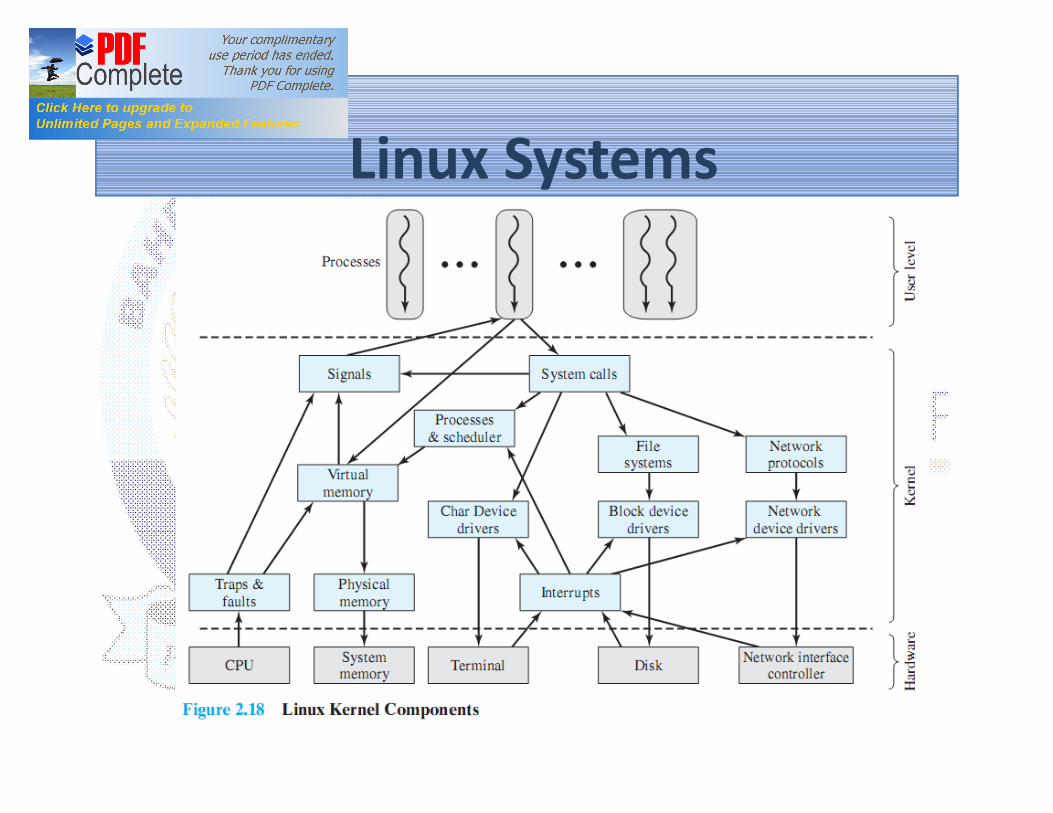
Linux SystemsLinux Systems• Started out as a UNIX variant for the IBM PC• Linus Torvalds, a Finnish student of computer science, wrote the initial
version• Linux was first posted on the Internet in 1991• Today it is a full-featured UNIX system that runs on several platforms• Is free and the source code is available• Key to success has been the availability of free software packages • Highly modular and easily configured
SummaryOperating system objectives and functions:
convenience, efficiency, ability to evolveuser/computer interfaceresource manager
Evolution:
serial processing,
simple batch systems, multiprogrammed batch systems,
time sharing systems
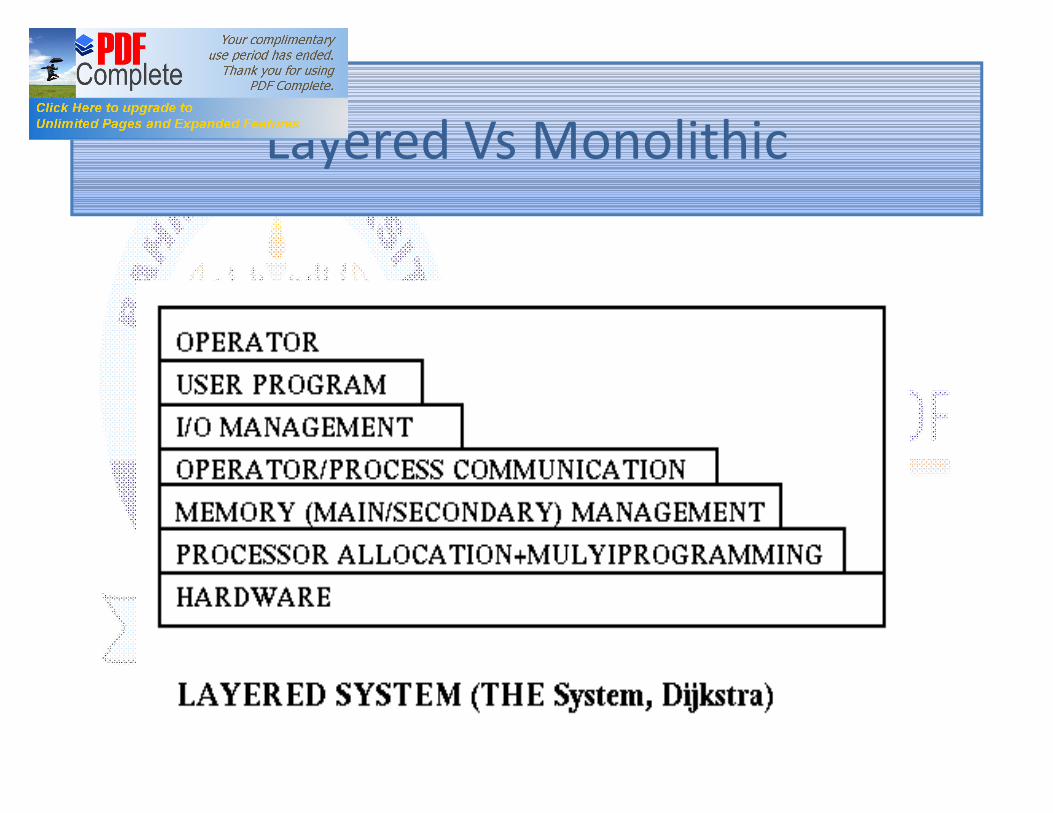
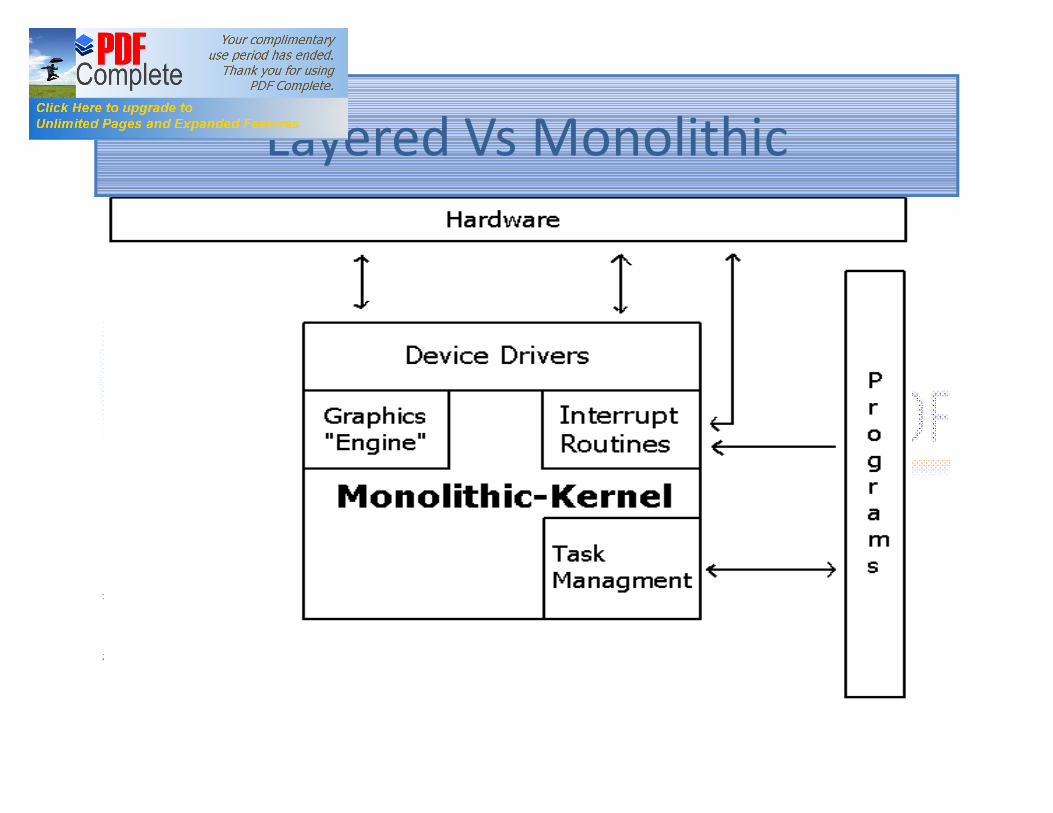
OS Architecture
Layered, Monolithic