chain reaction deliverable template
TRANSCRIPT
Virtual demonstration centre – Robotics Version 1
03/2021
WPT3
D.T3.2.10
Page I
Project information
Project Index Number: CE1519
Project Acronym: CHAIN REACTIONS
Project Title: Driving smart industrial growth through value chain innovation
Website: https://www.interreg-central.eu/Content.Node/CHAIN-REACTIONS.html
Start Date of the Pro-ject:
01.04.2019
Duration: 36 Months
Document Control page
Deliverable Title: DT3.2.10 – Joint implementation report for the pilot in the advanced manu-facturing sector – virtual demonstration centre – robotics
Lead Contractor of the Deliverable:
PP5 – RDA Pilsen
Authors: PP5 – RDA
Contractual Delivery Date:
31.01.2022
Actual Delivery Date: 25.03.2021

Page II
Table of content
1 Introduction ......................................................................................... 1
2 Robot ................................................................................................. 1
3 Industrial Robots classification .................................................................. 2
3.1 Generation of industrial robots ............................................................................................. 3
3.2 Single-purpose robots ........................................................................................................... 3
3.3 Multi-purpose robots ............................................................................................................ 3
3.4 With a fixed program ............................................................................................................ 3
3.5 With flexible program ........................................................................................................... 3
3.6 Cognitive robots .................................................................................................................... 4
3.7 Programmable robots ........................................................................................................... 4
3.8 Synchronous robots............................................................................................................... 4
4 Collaborative robots ............................................................................... 4
4.1 Manufacturers ....................................................................................................................... 5
4.2 Basic parameters ................................................................................................................... 7
4.3 Collaborative robots library ................................................................................................... 9
4.3.1 Universal robots ....................................................................................................... 9
4.3.2 KUKA ....................................................................................................................... 15
4.3.3 Fanuc ...................................................................................................................... 18
4.3.4 ABB ......................................................................................................................... 23
4.3.5 Kawasaki ................................................................................................................. 24
4.3.6 MABI ....................................................................................................................... 26
4.3.7 Rethink .................................................................................................................... 27
4.3.8 Yaskawa .................................................................................................................. 27
4.4 End-effectors library ............................................................................................................ 28
4.4.1 Robotiq ................................................................................................................... 28
4.4.2 OnRobot ................................................................................................................. 29
4.4.3 Schunk .................................................................................................................... 31
4.4.4 Schmalz ................................................................................................................... 32
4.4.5 Zimmer group ......................................................................................................... 33
5 Resources ........................................................................................... 34

Page 1
1 INTRODUCTION
Robotization is a process involving robots in manufacturing and other industrial areas. It can also be used in non-industrial areas such as in the military, medicine, aviation, transport or even in households can be found all kinds of robots helping to make our lives easier. Recently, the number of robots being used by companies to boost productivity has rapidly increased. More and more human jobs are being replaced by robots. [1] Robotization aims to decrease production costs, improving production management and increasing flexibility, as well as increasing competitiveness. It is not just an attempt to replace human labor with a robot, but to reduce the proportion of human labor in a dangerous, harmful, unpleasant, and difficult to access environment. Those robots should learn human tasks and solve them quicker, more effec-tively with better quality output. From an economical point of view, it can seem like a big investment for companies, but it has a fast return on investment. [1] This term goes hand in hand with the term automation. One definition says that from the point of view of industrialization, automation is the successor of mechanization, which means that human activity is replaced by technical devices or machines and automata. The machine uses artificial intelligence to perform predetermined tasks. Production processes are automated to increase labor productivity, im-prove product quality and worker safety. Repetitive activities that can be monotonous for a person due to their still the same sequence of actions and movements tend to be automated, even to save not only time but also energy and money. Human activity is automated even where it also brings the increased quality of production. [1]
2 ROBOT
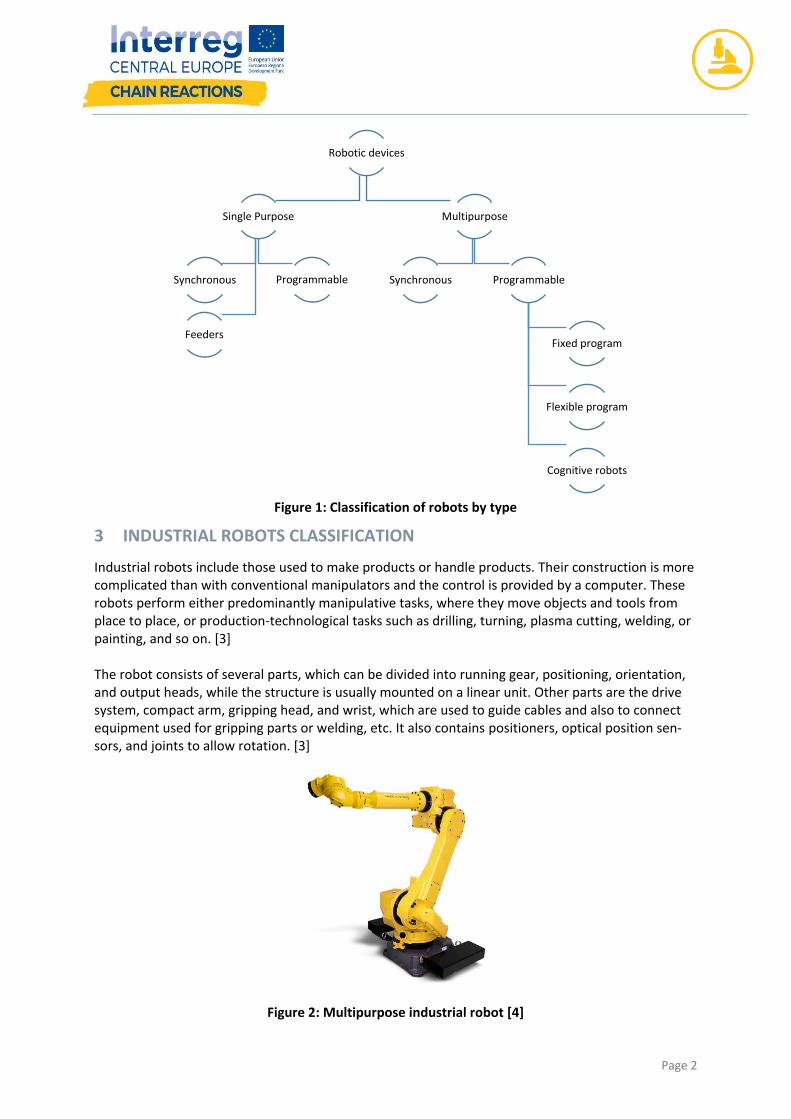
Previously, the term robot was associated with artificial man, but now the term is used to describe a system in which mechanical, electrical, and electronic elements based on information technology are integrated. It is controlled automatically or by a computer. The robot can perform most human activi-ties, but it does not have biological properties like living beings. [1] Robots are used for production, machine operation, handling, and assembly. They can perform tasks such as loading and unloading parts from machines, packaging, assembling, testing and measuring, moving parts, handling parts on machine tools, or positioning parts and pick & place applications. [1] There are a large number of robots, which are divided according to use, function, design, or construc-tion, whether they are kitchen robots, or imitations of people and animals, so-called androids, or var-ious manipulators. There is no one way to classify robots, but they are divided from several different points of view. Robot-type handling devices can be classified, for example, according to kinematic structure, several degrees of freedom, drives used, control method, programming, workspace geom-etry, or motion characteristics. One type of classification of robotic devices is shown in the following figure. [2]
Page 2
Figure 1: Classification of robots by type
3 INDUSTRIAL ROBOTS CLASSIFICATION
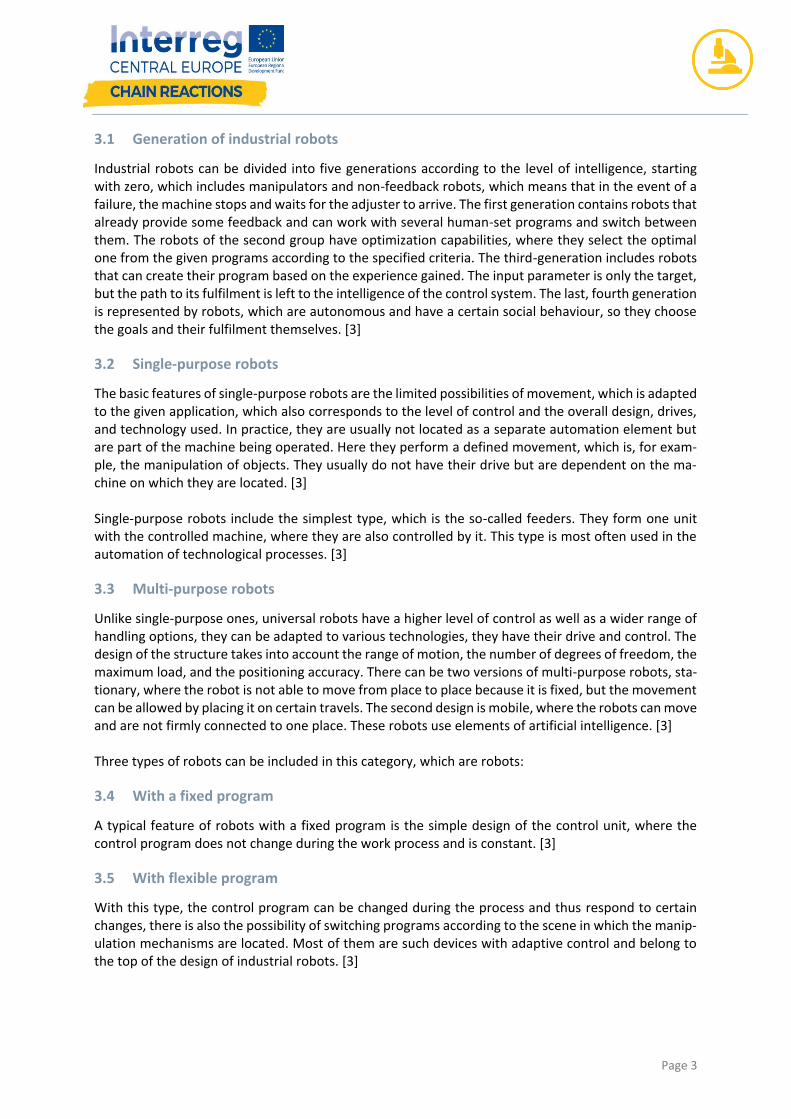
Industrial robots include those used to make products or handle products. Their construction is more complicated than with conventional manipulators and the control is provided by a computer. These robots perform either predominantly manipulative tasks, where they move objects and tools from place to place, or production-technological tasks such as drilling, turning, plasma cutting, welding, or painting, and so on. [3] The robot consists of several parts, which can be divided into running gear, positioning, orientation, and output heads, while the structure is usually mounted on a linear unit. Other parts are the drive system, compact arm, gripping head, and wrist, which are used to guide cables and also to connect equipment used for gripping parts or welding, etc. It also contains positioners, optical position sen-sors, and joints to allow rotation. [3]
Figure 2: Multipurpose industrial robot [4]
Robotic devices
Single Purpose
Feeders
Synchronous Programmable
Multipurpose
Synchronous Programmable
Fixed program
Flexible program
Cognitive robots
Page 3
3.1 Generation of industrial robots
Industrial robots can be divided into five generations according to the level of intelligence, starting with zero, which includes manipulators and non-feedback robots, which means that in the event of a failure, the machine stops and waits for the adjuster to arrive. The first generation contains robots that already provide some feedback and can work with several human-set programs and switch between them. The robots of the second group have optimization capabilities, where they select the optimal one from the given programs according to the specified criteria. The third-generation includes robots that can create their program based on the experience gained. The input parameter is only the target, but the path to its fulfilment is left to the intelligence of the control system. The last, fourth generation is represented by robots, which are autonomous and have a certain social behaviour, so they choose the goals and their fulfilment themselves. [3]
3.2 Single-purpose robots
The basic features of single-purpose robots are the limited possibilities of movement, which is adapted to the given application, which also corresponds to the level of control and the overall design, drives, and technology used. In practice, they are usually not located as a separate automation element but are part of the machine being operated. Here they perform a defined movement, which is, for exam-ple, the manipulation of objects. They usually do not have their drive but are dependent on the ma-chine on which they are located. [3] Single-purpose robots include the simplest type, which is the so-called feeders. They form one unit with the controlled machine, where they are also controlled by it. This type is most often used in the automation of technological processes. [3]
3.3 Multi-purpose robots
Unlike single-purpose ones, universal robots have a higher level of control as well as a wider range of handling options, they can be adapted to various technologies, they have their drive and control. The design of the structure takes into account the range of motion, the number of degrees of freedom, the maximum load, and the positioning accuracy. There can be two versions of multi-purpose robots, sta-tionary, where the robot is not able to move from place to place because it is fixed, but the movement can be allowed by placing it on certain travels. The second design is mobile, where the robots can move and are not firmly connected to one place. These robots use elements of artificial intelligence. [3] Three types of robots can be included in this category, which are robots:
3.4 With a fixed program
A typical feature of robots with a fixed program is the simple design of the control unit, where the control program does not change during the work process and is constant. [3]
3.5 With flexible program
With this type, the control program can be changed during the process and thus respond to certain changes, there is also the possibility of switching programs according to the scene in which the manip-ulation mechanisms are located. Most of them are such devices with adaptive control and belong to the top of the design of industrial robots. [3]
Page 4
3.6 Cognitive robots
Cognitive robots are among the robots with a certain degree of artificial intelligence. They are equipped with the possibility of perception and rational thinking, hence the name cognitive, which is also used in psychology to denote the types of cognitive activities, which are perception, comprehen-sion, reasoning, memory, or imagination. Based on these possibilities, the robot can perform activities such as perception and recognition of the environment, creating an internal model of the environment, and based on that to decide on its activities. He can also influence the environment in which he moves and manipulates objects and, last but not least, it can communicate with humans. The goals to be achieved are set in advance by a human and the robot's attention is focused on achieving them. [5] The following types belong to both categories, i.e. single-purpose, and multi-purpose robots:
3.7 Programmable robots
This is a type of robot where the device is functionally dependent on the control program. The robots themselves are completely independent of the machine being operated. They have their drive, design, and functions. It follows the set program by a person. [5]
3.8 Synchronous robots
Also called teleoperators, or exoskeletons, are devices where their control is performed by a person to amplify and facilitate the movement quantities caused by the manager. These manipulators are independent of the machine being operated but transmit remotely the commands of a person who takes the position of the control and evaluation unit, and the manipulator then becomes the output unit that performs the movement. The use of such devices is in the field of medicine, for scientific and military purposes, or in laboratories and environments with unfavourable, dangerous conditions. Re-motely controlled robots can also work with dangerous, radioactive substances. [5]
4 COLLABORATIVE ROBOTS
This chapter deals with the characteristics of collaborative robots, analysis of their manufacturers and the safety of robotic workplaces. This type of robot is designed to share the workspace with people, helping them to handle various tasks, such as those requiring high precision. They are widely used in activities such as a screwdriver, welding, gluing, measuring, and placing objects. Unlike humans, they can do monotonous activities constantly, without a break at the same speed and quality. The big difference from industrial robots is that they work near humans and do not have barriers around them, so there is a great emphasis on safety. The robot contains sensors that detect the touch of a foreign object or human and stops im-mediately to prevent human injury or damage to the robot. It also includes a camera for capturing objects and the environment. [6]
Page 5
Figure 3: Collaborative robot [6]
Levels of robotic application [7]:
1) Conventional – the robot is in the protection zone and the operator is denied access 2) Coexistence - the use of another workplace is allowed to enter the robot's workspace 3) Cooperation - the operator and the robot work at the same workplace but without mutual
cooperation 4) Collaboration - direct cooperation of the operator with the robot
Conventional robots Collaborative robots protection zones direct cooperation with man
safety is ensured by motion sensors when entering the workplace safety elements built directly into the robot
high demands on programming knowledge simple programming
demanding setup quick setup and commissioning
complex conversion to another type of operation flexible use
large area requirements small space requirements
higher purchase price with relatively high inci-dental costs
lower purchase price and faster return on investment
4.1 Manufacturers
Since the 1990s, collaborative robots have been a part of our society. But especially nowadays has grown the profile of cobots with automation and sensor technologies and artificial intelligence. Inter-est in collaborative robots has begun to rapidly rise since 2016, with experts predicting that up to 434,000 units will be sold in 2025. More and more companies are increasing their products as the cobots become more mainstream. [9] There is a list of the best collaborative robotic companies. Automation News installed more than 450,000 industrial robots by 2017. As expected, this method is due to the growing interest in collabo-rative robots. Another global robot brand is ABB s.r.o., which has reached the limit of 300,000 indus-trial robots, as well as Yaskawa. KUKA AG is also one of the world's leading manufacturers with a total of approximately 80,000 installed robots. Universal Robots A/S is engaged in manufacturing focused only on collaborative robots and is among the leaders in its field on the world market. UR robots are installed all over the world, eg in Nissan or Yokohama. Stäubli, Epson, Kawasaki, Rethink Robotics and
Page 6
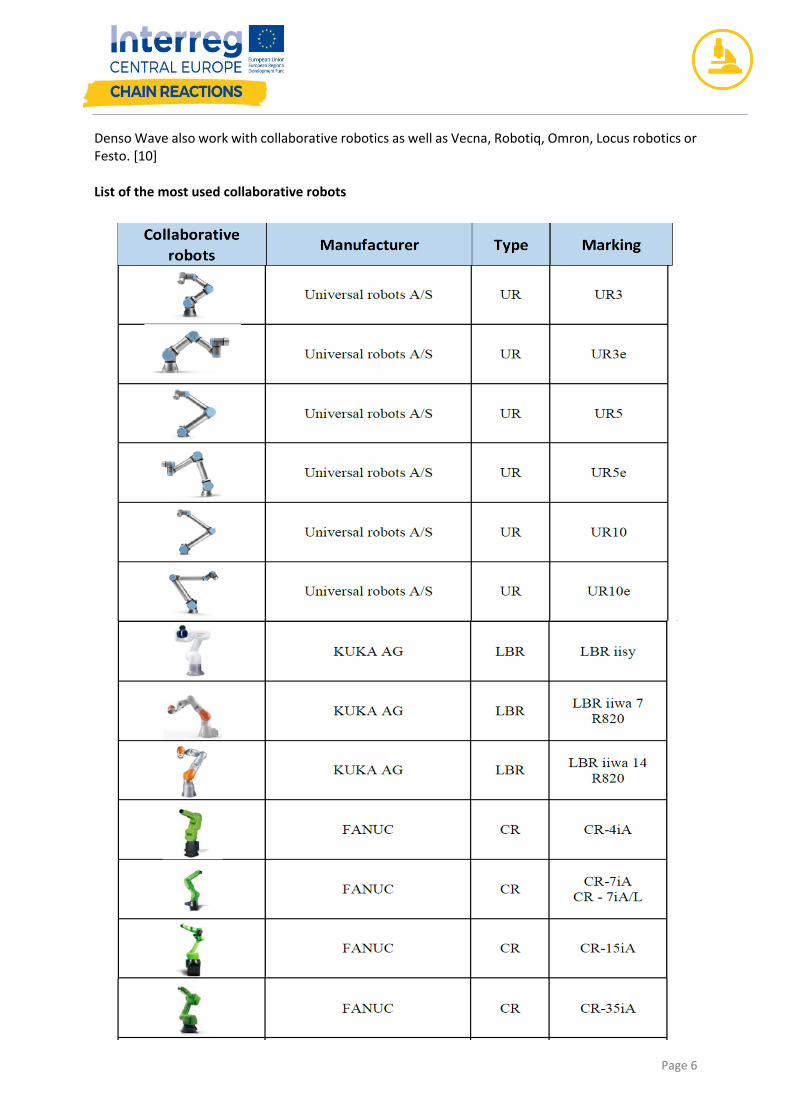
Denso Wave also work with collaborative robotics as well as Vecna, Robotiq, Omron, Locus robotics or Festo. [10] List of the most used collaborative robots

Page 7
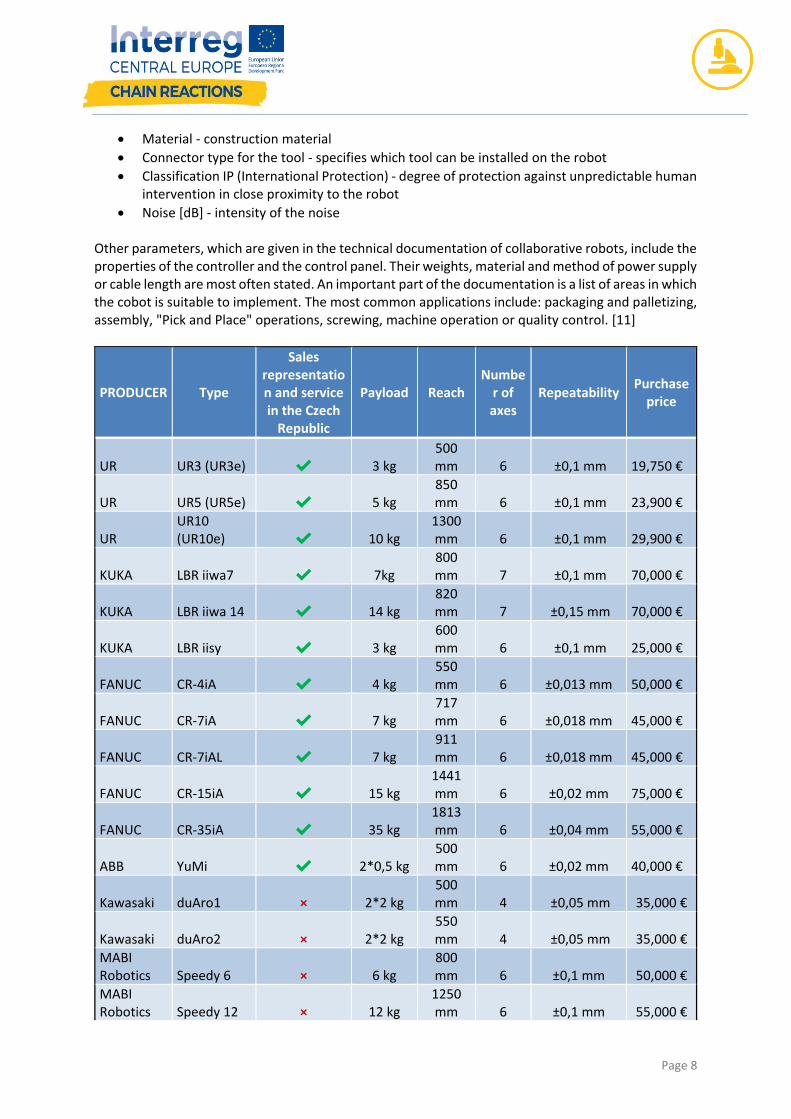
4.2 Basic parameters
This subchapter deals with the technical parameters of collaborative robots. According to this specifi-cation, it is decided in which work space and for which work activity the collaborative robot is most suitable. Specifications:
Handling load [kg] – maximum weight permissible for robot construction
Range [mm] – the maximum position in which the robot is able to work
Controlled axes – determine the number of swivel joints Performance:
Repeatability [mm] - expresses how many times and with what accuracy the robot is able to return to the same position. The range is given with a tolerance of hundreds of millimeters.
Permitted ambient temperature [oc] - indicates the temperature range in which the cobot can operate
Power consumption [W] - indicates power consumption Movement:
Working range [0] - maximum degree of rotation of individual joints
Maximum speed [0/s; mm/s] - speed of rotation or displacement of joints Physical properties:
Dimensions [mm] - diameter or floor plan dimension
Weight [kg] - total weight of the robot in the unloaded state
Page 8
Material - construction material
Connector type for the tool - specifies which tool can be installed on the robot
Classification IP (International Protection) - degree of protection against unpredictable human intervention in close proximity to the robot
Noise [dB] - intensity of the noise
Other parameters, which are given in the technical documentation of collaborative robots, include the properties of the controller and the control panel. Their weights, material and method of power supply or cable length are most often stated. An important part of the documentation is a list of areas in which the cobot is suitable to implement. The most common applications include: packaging and palletizing, assembly, "Pick and Place" operations, screwing, machine operation or quality control. [11]
PRODUCER Type
Sales representation and service in the Czech
Republic
Payload Reach Numbe
r of axes
Repeatability Purchase
price
UR UR3 (UR3e) ✔ 3 kg 500 mm 6 ±0,1 mm
19,750 €
UR UR5 (UR5e) ✔ 5 kg 850 mm 6 ±0,1 mm
23,900 €
UR UR10 (UR10e) ✔ 10 kg
1300 mm 6 ±0,1 mm
29,900 €
KUKA LBR iiwa7 ✔ 7kg 800 mm 7 ±0,1 mm
70,000 €
KUKA LBR iiwa 14 ✔ 14 kg 820 mm 7 ±0,15 mm
70,000 €
KUKA LBR iisy ✔ 3 kg 600 mm 6 ±0,1 mm
25,000 €
FANUC CR-4iA ✔ 4 kg 550 mm 6 ±0,013 mm
50,000 €
FANUC CR-7iA ✔ 7 kg 717 mm 6 ±0,018 mm
45,000 €
FANUC CR-7iAL ✔ 7 kg 911 mm 6 ±0,018 mm
45,000 €
FANUC CR-15iA ✔ 15 kg 1441 mm 6 ±0,02 mm
75,000 €
FANUC CR-35iA ✔ 35 kg 1813 mm 6 ±0,04 mm
55,000 €
ABB YuMi ✔ 2*0,5 kg 500 mm 6 ±0,02 mm
40,000 €
Kawasaki duAro1 × 2*2 kg 500 mm 4 ±0,05 mm
35,000 €
Kawasaki duAro2 × 2*2 kg 550 mm 4 ±0,05 mm
35,000 €
MABI Robotics Speedy 6 × 6 kg
800 mm 6 ±0,1 mm
50,000 €
MABI Robotics Speedy 12 × 12 kg
1250 mm 6 ±0,1 mm
55,000 €

Page 9
Rethink Sawyer × 4 kg 1260 mm 6 ±0,1 mm
35,000 €
Yaskawa Motoman HC10 × 10 kg
1200 mm 6 ±0,1 mm
25,000 €
4.3 Collaborative robots library
This chapter shows an overview of collaborative robots with their specific names and which company manufactures them. Furthermore, each of them has a technical specification with the stated data and parameters, as well as, for example, the area of use of specific cobots. Along with these infor-mation goes pictures of each cobots to show how it looks like.
4.3.1 Universal robots
Universal robots - UR3
Technical specification
Dimension: Ø 128 mm
Payload: 11 kg
Payload: 3 kg
Reach: 500 mm
Controlled axes: 6 swivel joints
- base: ± 180°/s
- arm: ± 180°/s
- elbow: ± 180°/s
- wrist 1: ± 360°/s
- wrist 2: ± 360°/s
- wrist 3: ± 360°/s
Allowed ambient temperature: 0–50°
Classification IP: IP64
Repeatibility: ±0,1 mm
More information Area of use:
- packaging and palletizing
- screwing
- injection molding machine operation
- polishing
- laboratory analysis
- gluing, dosing and welding
- removal and storage
- quality control
- assembly
- operating machines
Page 10
Universal robots - UR3e
Technical specification
Dimension: Ø 128 mm
Payload: 11,2 kg
Payload: 3 kg
Reach: 500 mm
Controlled axes: 6 swivel joints
- base: ± 180°/s
- arm: ± 180°/s
- elbow: ± 180°/s
- wrist 1: ± 360°/s
- wrist 2: ± 360°/s
- wrist 3: ± 360°/s
Allowed ambient temperature: 0–50°
Classification IP: IP54
Repeatibility: ±0,03 mm
More information Area of use:
- packaging and palletizing
- screwing
- injection molding machine operation
- polishing
- laboratory analysis
- gluing, dosing and welding
- removal and storage
- quality control
- assembly
- operating machines
Page 11
Universal robots - UR5
Technical specification
Dimension: Ø 149 mm
Payload: 18,4 kg
Payload: 5 kg
Reach: 850 mm
Controlled axes: 6 swivel joints
- base: ± 180°/s
- arm: ± 180°/s
- elbow: ± 180°/s
- wrist 1: ± 180°/s
- wrist 2: ± 180°/s
- wrist 3: ± 180°/s
Allowed ambient temperature: 0–50°
Classification IP: IP54
Repeatibility: ±0,1 mm
More information Area of use:
- packaging and palletizing
- screwing
- injection molding machine operation
- polishing
- laboratory analysis
- gluing, dosing and welding
- removal and storage
- quality control
- assembly
- operating machines

Page 12
Universal robots - UR5e
Technical specification
Dimension: Ø 149 mm
Payload: 20,6 kg
Payload: 5 kg
Reach: 850 mm
Controlled axes: 6 swivel joints
- base: ± 180°/s
- arm: ± 180°/s
- elbow: ± 180°/s
- wrist 1: ± 180°/s
- wrist 2: ± 180°/s
- wrist 3: ± 180°/s
Allowed ambient temperature: 0–50°
Classification IP: IP54
Repeatibility: ±0,03 mm
More information Area of use:
- packaging and palletizing
- screwing
- injection molding machine operation
- polishing
- laboratory analysis
- gluing, dosing and welding
- removal and storage
- quality control
- assembly
- operating machines
Page 13
Universal robots - UR10
Technical specification
Dimension: Ø 190 mm
Payload: 28,9 kg
Payload: 10 kg
Reach: 1300 mm
Controlled axes: 6 swivel joints
- base: ± 120°/s
- arm: ± 120°/s
- elbow: ± 180°/s
- wrist 1: ± 180°/s
- wrist 2: ± 180°/s
- wrist 3: ± 180°/s
Allowed ambient temperature: 0–50°
Classification IP: IP54
Repeatibility: ±0,1 mm
More information Area of use:
- packaging and palletizing
- screwing
- injection molding machine operation
- polishing
- laboratory analysis
- gluing, dosing and welding
- removal and storage
- quality control
- assembly
- operating machines
Page 14
Universal robots - UR10e
Technical specification
Dimension: Ø 190 mm
Payload: 33,5 kg
Payload: 10 kg
Reach: 1300 mm
Controlled axes: 6 swivel joints
- base: ± 120°/s
- arm: ± 120°/s
- elbow: ± 180°/s
- wrist 1: ± 180°/s
- wrist 2: ± 180°/s
- wrist 3: ± 180°/s
Allowed ambient temperature: 0–50°
Classification IP: IP54
Repeatibility: ±0,05 mm
More information Area of use:
- packaging and palletizing
- screwing
- injection molding machine operation
- polishing
- laboratory analysis
- gluing, dosing and welding
- removal and storage
- quality control
- assembly
- operating machines
Page 15
4.3.2 KUKA
KUKA - LBR iisy
Technical specification
Dimension: 510 mm x 600 mm
Payload: 18,8 kg
Payload: 3 kg
Reach: 600 mm
Controlled axes: 6 swivel joints
Classification IP: IP54
Repeatibility: ±0,1 mm
More information Area of use:
- handling on other machines
- measurement, testing and inspection
- palletizing
- other handling operations
- packaging and preparation of goods
- application of adhesive, sealant or similar material
- other coatings
- mechanical machining
- fastening
- insertion, mounting
- other assembly and disassembly operations
Page 16
KUKA - LBR iiwa 7 R800
Technical specification
Dimension: 500 mm x 483 mm x 190 mm
Payload: 22 kg
Payload: 7 kg
Max. Reach: 800 mm
Controlled axes: 7 swivel joints
- axis 1: 98°/s
- axis 2: 98°/s
- axis 3: 100°/s
- axis 4: 130°/s
- axis 5: 140°/s
- axis 6: 180°/s
- axis 7: 180°/s
Allowed ambient temperature: 5°- 45°C
Classification IP: IP54
Repeatibility: ±0,1 mm
More information Area of use:
- handling on other machines
- measurement, testing and inspection
- palletizing
- other handling operations
- packaging and preparation of goods
- application of adhesive, sealant or similar material
- other coatings
- mechanical machining
- fastening
- insertion, mounting
- other assembly and disassembly operations
Page 17
KUKA - LBR iiwa 14 R820
Technical specification
Dimension: 500 mm x 483 mm x 190 mm
Payload: 30 kg
Payload: 14 kg
Max. Reach: 820 mm
Controlled axes: 7 swivel joints
- axis 1: 85°/s
- axis 2: 85°/s
- axis 3: 100°/s
- axis 4: 75°/s
- axis 5: 130°/s
- axis 6: 135°/s
- axis 7: 135°/s
Allowed ambient temperature: 5°- 45°C
Classification IP: IP54
Repeatibility: ±0,15 mm
More information Area of use:
- handling on other machines
- measurement, testing and inspection
- palletizing
- other handling operations
- packaging and preparation of goods
- application of adhesive, sealant or similar material
- other coatings
- mechanical machining
- fastening
- insertion, mounting
- other assembly and disassembly operations

Page 18
4.3.3 Fanuc
FANUC - CR-4iA
Technical specification
Dimension: 737 mm x 360 mm
Payload: 48 kg
Max. Payload: 4 kg
Max. Reach: 550 mm
Controlled axes: 6 swivel joints
- axis 1: 340°
- axis 2: 150°
- axis 3: 354°
- axis 4: 380°
- axis 5: 200°
- axis 6: 720°
Max. speed: 500/1000 m/s
Allowed ambient temperature: +5°- +45°C
Classification IP: IP67
Repeatibility: ±0,013 mm
More information Area of use:
- electronic environment
- assembly of small components (manufacture of watches, toys)
- manufacture of automotive components
Page 19
FANUC - CR-7iA
Technical specification
Dimension: 822 mm x 465 mm
Payload: 53 kg
Max. Payload: 7 kg
Max. Reach: 717 mm
Controlled axes: 6 swivel joints
- axis 1: 340°
- axis 2: 166°
- axis 3: 373°
- axis 4: 380°
- axis 5: 240°
- axis 6: 720°
Max. speed: 500/1000 m/s
Allowed ambient temperature: +5°- +45°C
Classification IP: IP67
Repeatibility: ±0,018 mm
More information Area of use:
- automotive
- healthcare
- electronic industry
- food industry
- gluing, dosing and welding
- machinery industry
Page 20
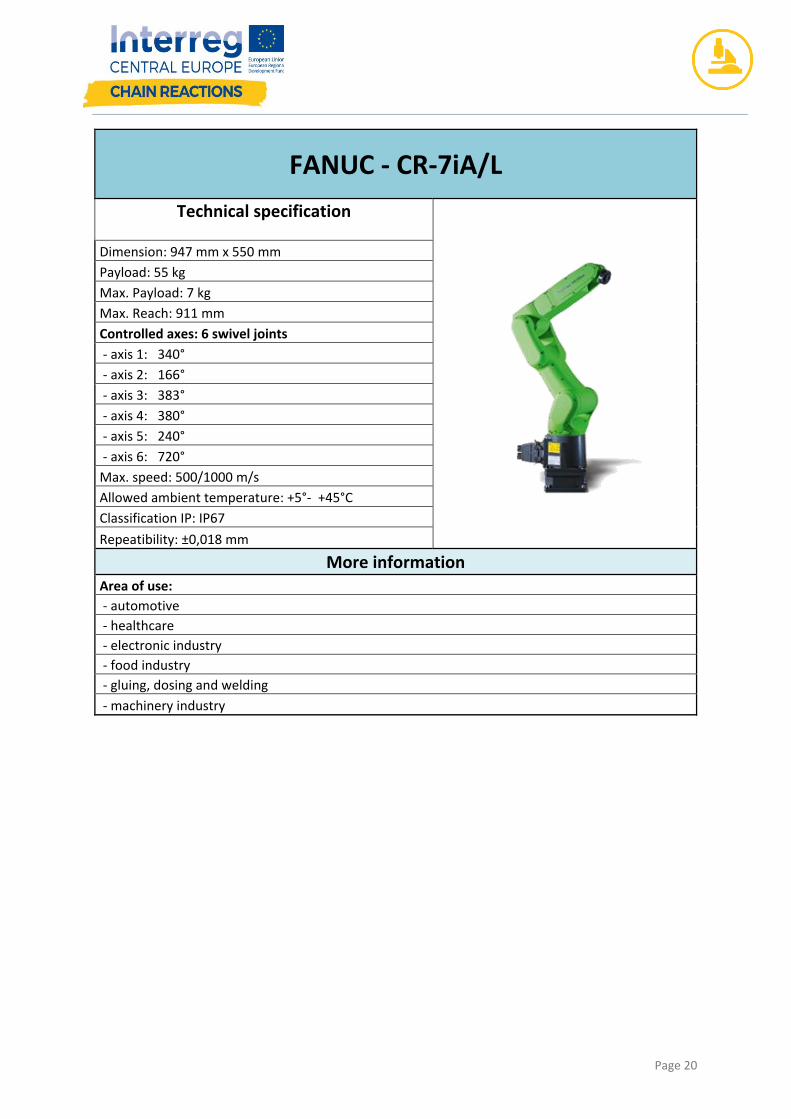
FANUC - CR-7iA/L
Technical specification
Dimension: 947 mm x 550 mm
Payload: 55 kg
Max. Payload: 7 kg
Max. Reach: 911 mm
Controlled axes: 6 swivel joints
- axis 1: 340°
- axis 2: 166°
- axis 3: 383°
- axis 4: 380°
- axis 5: 240°
- axis 6: 720°
Max. speed: 500/1000 m/s
Allowed ambient temperature: +5°- +45°C
Classification IP: IP67
Repeatibility: ±0,018 mm
More information Area of use:
- automotive
- healthcare
- electronic industry
- food industry
- gluing, dosing and welding
- machinery industry

Page 21
FANUC - CR-15iA
Technical specification
Dimension: 2014 mm x 850 mm
Payload: 255 kg
Max. Payload: 15 kg
Max. Reach: 1441 mm
Controlled axes: 6 swivel joints
- axis 1: 340°
- axis 2: 180°
- axis 3: 305°
- axis 4: 380°
- axis 5: 280°
- axis 6: 900°
Max. speed: 800 / 1500 m/s
Allowed ambient temperature: +5°- +45°C
Classification IP: IP54 / IP67
Repeatibility: ±0,02 mm
More information Area of use:
- automotive
- healthcare
- electronic industry
- food industry
- gluing, dosing and welding
- machinery industry

Page 22
FANUC - CR-35iA
Technical specification
Dimension: 2834 mm x 1310 mm
Payload: 990 kg
Max. Payload: 35 kg
Max. Reach: 1813 mm
Controlled axes: 6 swivel joints
- axis 1: 370°
- axis 2: 165°
- axis 3: 258°
- axis 4: 400°
- axis 5: 220°
- axis 6: 900°
Max. speed: 250/750 m/s
Allowed ambient temperature: +5°- +45°C
Classification IP: IP54 / IP67
Repeatibility: ±0,04 mm
More information Area of use:
- automotive
- healthcare
- electronic industry
- food industry
- gluing, dosing and welding
- machinery industry
Page 23
4.3.4 ABB
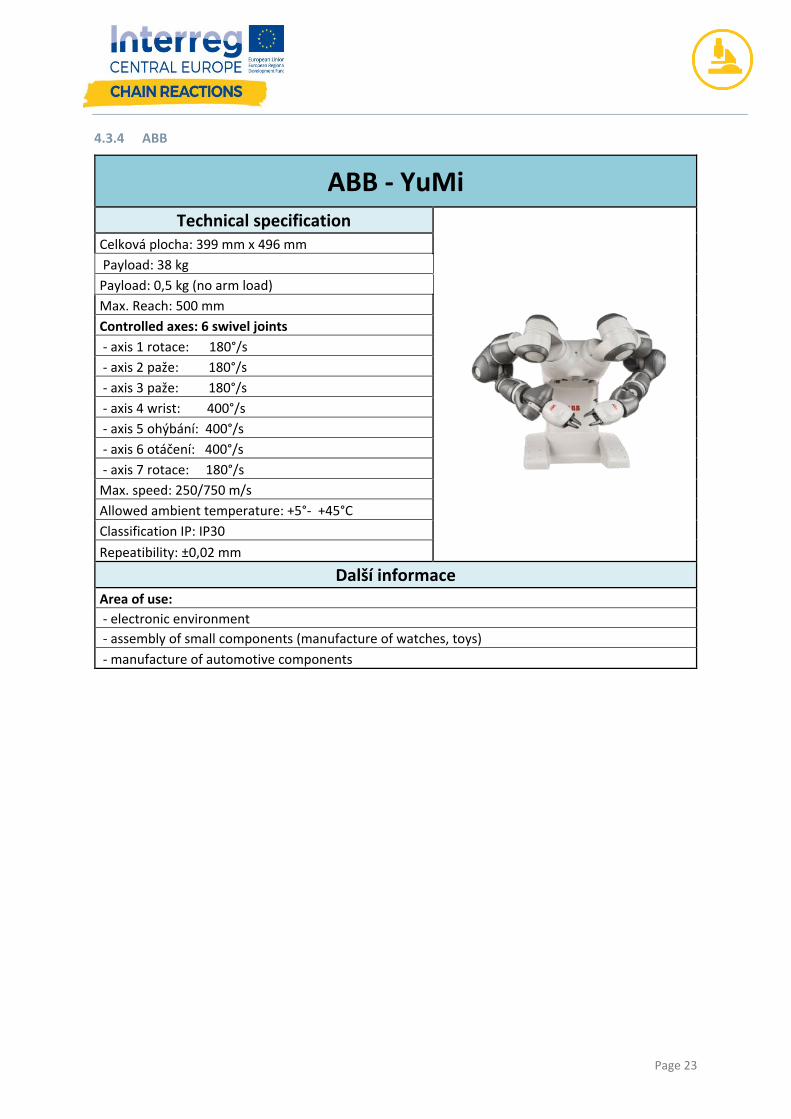
ABB - YuMi Technical specification
Celková plocha: 399 mm x 496 mm
Payload: 38 kg
Payload: 0,5 kg (no arm load)
Max. Reach: 500 mm
Controlled axes: 6 swivel joints
- axis 1 rotace: 180°/s
- axis 2 paže: 180°/s
- axis 3 paže: 180°/s
- axis 4 wrist: 400°/s
- axis 5 ohýbání: 400°/s
- axis 6 otáčení: 400°/s
- axis 7 rotace: 180°/s
Max. speed: 250/750 m/s
Allowed ambient temperature: +5°- +45°C
Classification IP: IP30
Repeatibility: ±0,02 mm
Další informace Area of use:
- electronic environment
- assembly of small components (manufacture of watches, toys)
- manufacture of automotive components
Page 24
4.3.5 Kawasaki
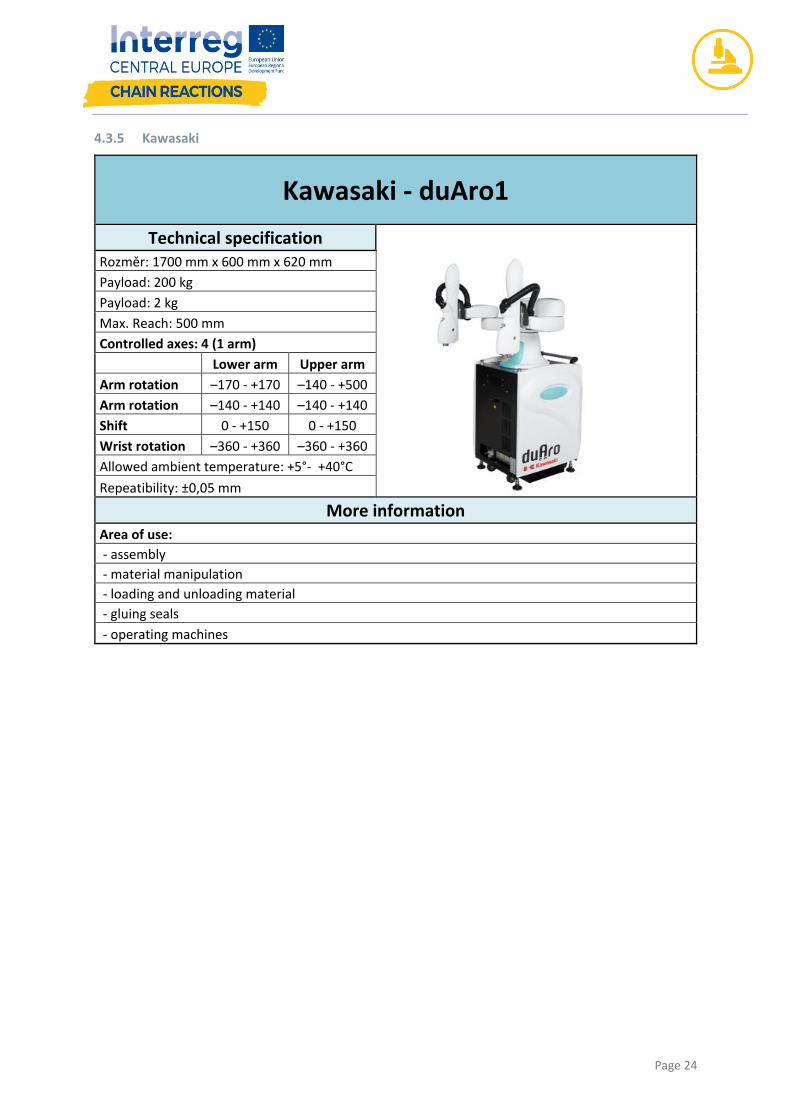
Kawasaki - duAro1
Technical specification
Rozměr: 1700 mm x 600 mm x 620 mm
Payload: 200 kg
Payload: 2 kg
Max. Reach: 500 mm
Controlled axes: 4 (1 arm)
Lower arm Upper arm
Arm rotation –170 - +170 –140 - +500
Arm rotation –140 - +140 –140 - +140
Shift 0 - +150 0 - +150
Wrist rotation –360 - +360 –360 - +360
Allowed ambient temperature: +5°- +40°C
Repeatibility: ±0,05 mm
More information Area of use:
- assembly
- material manipulation
- loading and unloading material
- gluing seals
- operating machines
Page 25
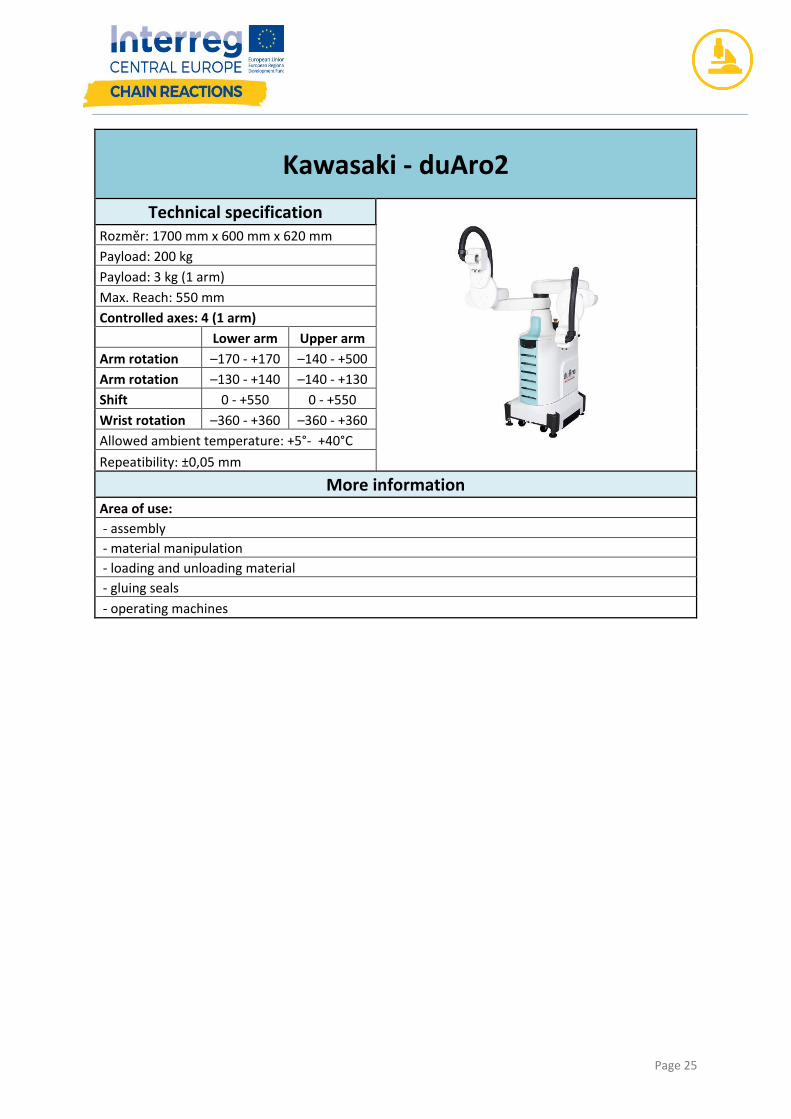
Kawasaki - duAro2
Technical specification
Rozměr: 1700 mm x 600 mm x 620 mm
Payload: 200 kg
Payload: 3 kg (1 arm)
Max. Reach: 550 mm
Controlled axes: 4 (1 arm)
Lower arm Upper arm
Arm rotation –170 - +170 –140 - +500
Arm rotation –130 - +140 –140 - +130
Shift 0 - +550 0 - +550
Wrist rotation –360 - +360 –360 - +360
Allowed ambient temperature: +5°- +40°C
Repeatibility: ±0,05 mm
More information Area of use:
- assembly
- material manipulation
- loading and unloading material
- gluing seals
- operating machines

Page 26
4.3.6 MABI
MABI - Speedy 6
Technical specification
Weight: 28 kg
Payload: 6 kg
Max. reach: 800 mm
swivel joints: 6
A1 ±300 145 °/s
A2 ±90 145 °/s
A3 ±160 180 °/s
A4 ±300 180 °/s
A5 ±117,5 275 °/s
A6 ±180 275 °/s
Allowed ambient temperature: +0°- +55°C
Repeatibility: ±0,1 mm
More information Area of use:
- gathering
- material manipulation
- loading and unloading material
MABI - Speedy 12
Technical specification
Weight: 35 kg
Payload: 12 kg
Max. reach: 1250 mm
swivel joints: 6
A1 ±300 75 °/s
A2 ±90 75 °/s
A3 ±160 145 °/s
A4 ±300 145 °/s
A5 ±117,5 275 °/s
A6 ±180 275 °/s
Allowed ambient temperature: +0°- +55°C
Repeatibility: ±0,1 mm
More information Area of use:
- gathering
- material manipulation

Page 27
- loading and unloading material
4.3.7 Rethink
Rethink Robotics - Sawyer
Technical specification
Weight: 19 kg
Payload: 4 kg
Max. reach: 1260 mm
swivel joints: 7
J0 - J3 ±350
J4 - J5 ±340
J6 ±540
Allowed ambient temperature: +0°- +40°C
Repeatibility: ±0,1 mm
More information Area of use:
- material manipulation
-testing el. Circuit boards
- operating machines
4.3.8 Yaskawa
Yaskawa - Motoman HC10 Technical specification
Weight: 47 kg
Payload: 10 kg
Max. reach: 1200 mm
Swivel joints: 6
S ±180 130 °/s
L ±180 130 °/s
U ±355/-5 180 °/s
R ±180 180 °/s
B ±180 250 °/s
T ±180 250 °/s
Allowed ambient temperature: +0°- +40°C
Repeatibility: ±0,1 mm
More information Area of use:

Page 28
- assembly
- material manipulation
- loading and unloading material
- operating machines
4.4 End-effectors library
This subchapter is devoted to tools, the so-called end effectors of collaborative robots. End effectors are usually not part of the portfolio of manufacturers of the robots themselves. The best-known sup-pliers of these tools include:
Universal Robots A/S
Schmalz GmbH
Robotic Inc.
OnRobot A/S
Weiss Robotics GmbH & Co
Schunk GmbH & Co. KG The tools are suitable for collaborative robots from multiple manufacturers at the same time. They are constructed on the basis of standards and with regard to compatibility with the axes of the cobot arms. If the end effector cannot be connected to the robot, there are so-called adapters on the market, which perform the function of a connecting member between the tool and the robot. Different types of end effectors are available on the market, broken down by area of application.
4.4.1 Robotiq
Robotiq 2 - Finger adaptive robot gripper
Application
Operating machine
Gripping and moving
Assembly
Laboratory testing
Technical specification
Weight: 1 kg
Max. payload 5 kg
Compatible with: Universal Robots
Yaskawa
Aubo
Hanwha
Doosan Robotics
Advantages
Plug + Play integration quickly adapts to parts of various shapes and sizes.
Possibility to adjust position, speed, force.
Page 29
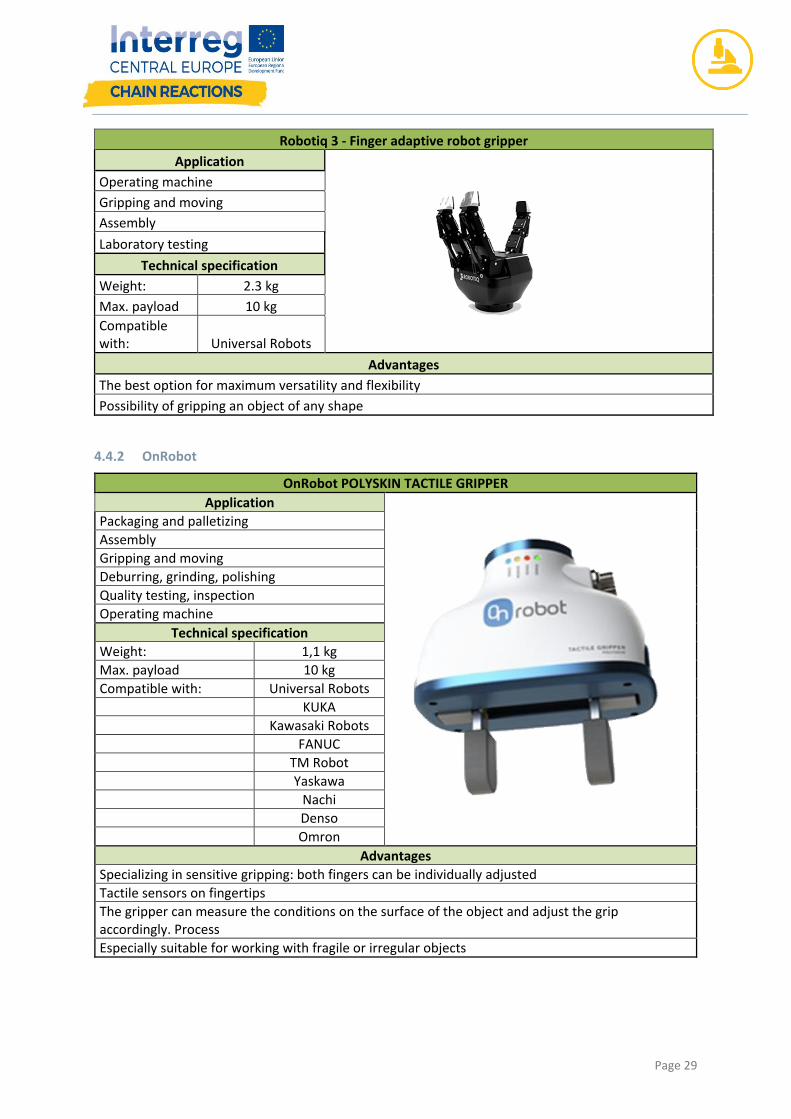
Robotiq 3 - Finger adaptive robot gripper
Application
Operating machine
Gripping and moving
Assembly
Laboratory testing
Technical specification
Weight: 2.3 kg
Max. payload 10 kg
Compatible with: Universal Robots
Advantages
The best option for maximum versatility and flexibility
Possibility of gripping an object of any shape
4.4.2 OnRobot
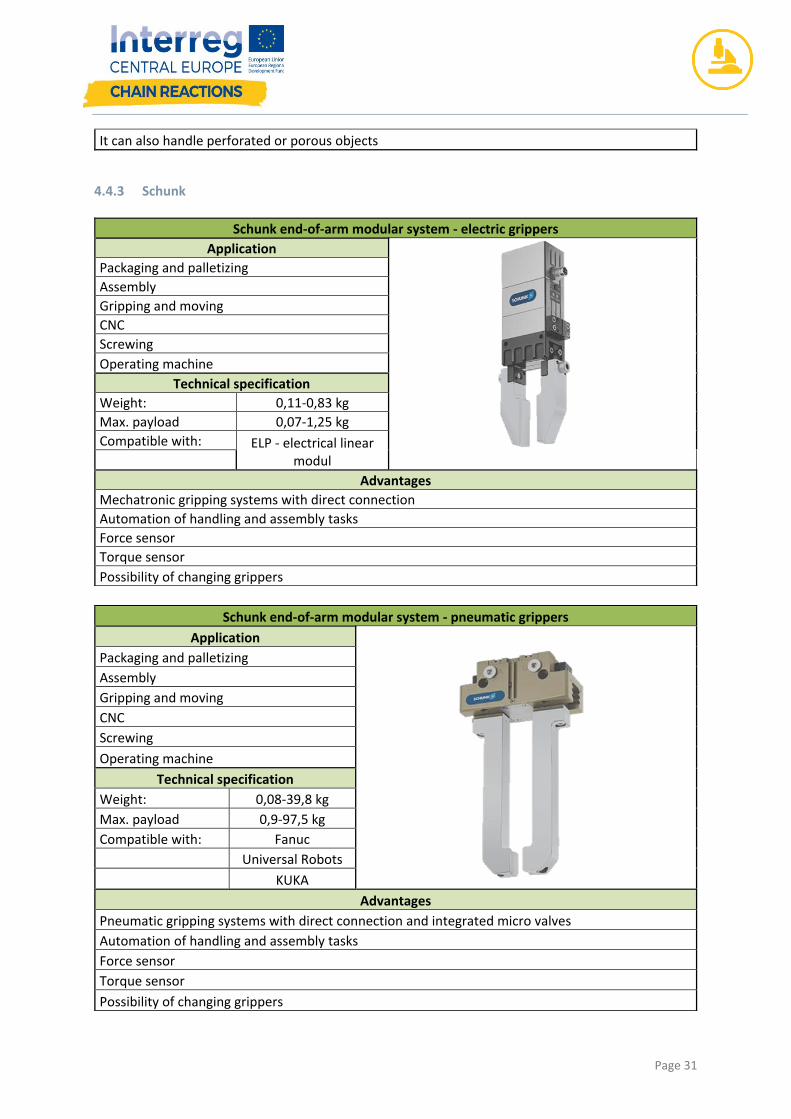
OnRobot POLYSKIN TACTILE GRIPPER
Application
Packaging and palletizing
Assembly
Gripping and moving
Deburring, grinding, polishing
Quality testing, inspection
Operating machine
Technical specification
Weight: 1,1 kg
Max. payload 10 kg
Compatible with: Universal Robots
KUKA
Kawasaki Robots
FANUC
TM Robot
Yaskawa
Nachi
Denso
Omron
Advantages
Specializing in sensitive gripping: both fingers can be individually adjusted
Tactile sensors on fingertips
The gripper can measure the conditions on the surface of the object and adjust the grip accordingly. Process
Especially suitable for working with fragile or irregular objects

Page 30
OnRobot RG2-FT
Application
Packaging and palletizing
Assembly
Gripping and moving
Deburring, grinding, polishing
Quality testing, inspection
Operating machine
Technical specification
Weight: 0,98 kg
Max. payload 4 kg
Compatible with: Universal Robots
KUKA
Kawasaki Robots
FANUC
TM Robot
Yaskawa
Nachi
Denso
Omron
Advantages
It includes a force sensor, torsion sensor and a proximity sensor for accurate object detection
The gripper detects the threat of an object slipping before it happens
Especially suitable for precise assembly
OnRobot GECKO GRIPPER
Application
Packaging and palletizing
Assembly
Gripping and moving
Deburring, grinding, polishing
Quality testing, inspection
Operating machine
Technical specification
Weight:
Max. payload 6,5 kg
Compatible with: Universal Robots
KUKA
Kawasaki Robots
FANUC
TM Robot
Yaskawa
Nachi
Denso
Omron
Advantages
Generating so-called Van der Waals forces eliminates the need for vacuum grippers
Page 31
It can also handle perforated or porous objects
4.4.3 Schunk
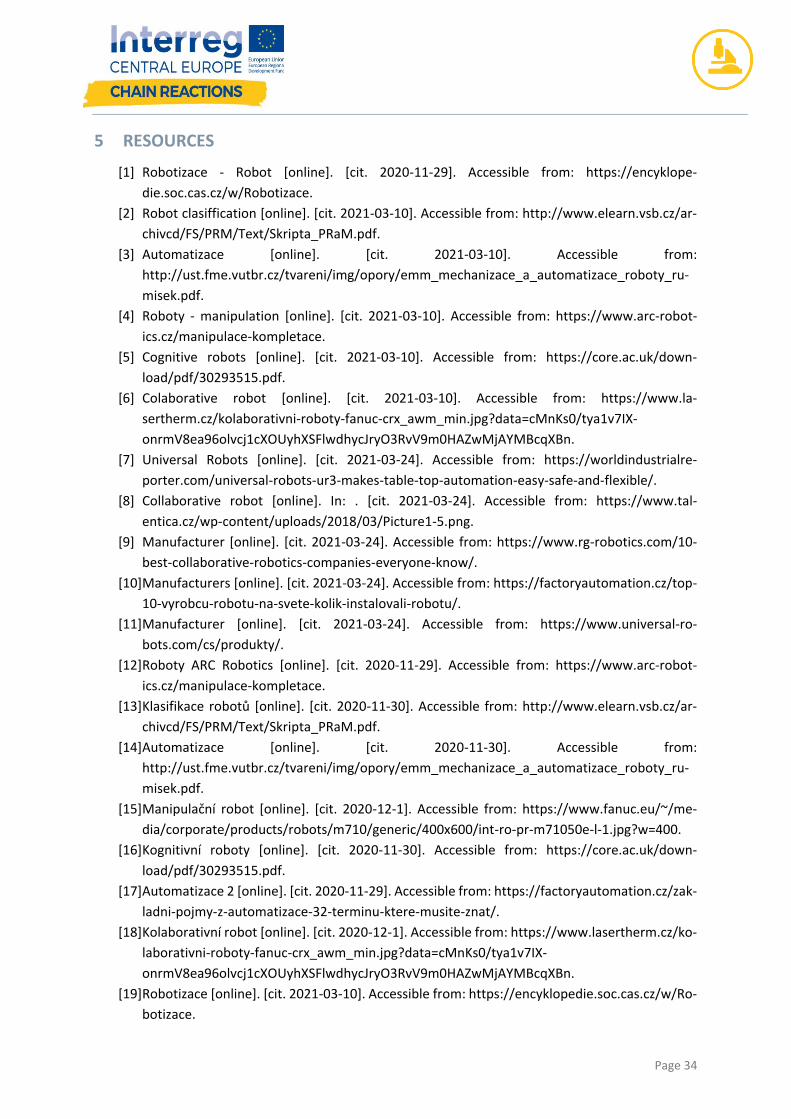
Schunk end-of-arm modular system - electric grippers
Application
Packaging and palletizing
Assembly
Gripping and moving
CNC
Screwing
Operating machine
Technical specification
Weight: 0,11-0,83 kg
Max. payload 0,07-1,25 kg
Compatible with: ELP - electrical linear modul
Advantages
Mechatronic gripping systems with direct connection
Automation of handling and assembly tasks
Force sensor
Torque sensor
Possibility of changing grippers
Schunk end-of-arm modular system - pneumatic grippers
Application
Packaging and palletizing
Assembly
Gripping and moving
CNC
Screwing
Operating machine
Technical specification
Weight: 0,08-39,8 kg
Max. payload 0,9-97,5 kg
Compatible with: Fanuc
Universal Robots
KUKA
Advantages
Pneumatic gripping systems with direct connection and integrated micro valves
Automation of handling and assembly tasks
Force sensor
Torque sensor
Possibility of changing grippers

Page 32
4.4.4 Schmalz
Vacuum end effector starter set - VEE UR
Application
Assembly
Gripping and moving
CNC
Operating machine
Laboratory testing
Technical specification
Weight: 0,35 kg
Max. suction rate 42.5 l/min
Compatible with: Universal Robots
Advantages
It contains modular components for assembling the end effector unit
Thanks to the integrated flange, it can be mounted on UR3, UR5 and UR10 robots
Electrical vacuum generator - cobotpump ECBPI
Application
Collaborative robots
Technical specification
Weight: 775 g
Max. suction rate 12 l/min
Compatible with: UR Robots
Advantages
A new generation of vacuum generators that do not need compressed air

Page 33
4.4.5 Zimmer group
Zimmer group - pneumatic grippers
Application
Operating machine
Gripping and moving
Assembly
Packaging and palletizing
Technical specification
Weight: 0,14-88 kg
Max. payload
Compatible with:
Universal Robots
Yaskawa
Advantages
Pneumatic gripping system
Large selection of different models, from the strongest grippers to the standard for Uni Application
Includes built-in URCaps software to make it easier to control end effectors
Zimmer group - hybrid grippers
Application Operating machine
Gripping and moving
Assembly
Packaging and palletizing
Technical specification
Weight: 0,45 -1,45 kg
Max. payload
Compatible with: Universal Robots
Yaskawa
Advantages
Hybrid system based on intelligent pneumatic grippers
Includes built-in URCaps software to make it easier to control end effectors
Výhody
Pneumatický uchopovací systém
Obsahuje vestavěný software URCaps pro usnadnění ovládání koncových efektorů
Velký výběr různých modelů, od nejsilnějších uchopovačů až po standardní pro uni použití
Zimmer group - pneumatic grippers
Použití
Obsluha stroje
Uchopování a přemisťování
Montáž
Balení a paletizace
Page 34
5 RESOURCES
[1] Robotizace - Robot [online]. [cit. 2020-11-29]. Accessible from: https://encyklope-
die.soc.cas.cz/w/Robotizace.
[2] Robot clasiffication [online]. [cit. 2021-03-10]. Accessible from: http://www.elearn.vsb.cz/ar-
chivcd/FS/PRM/Text/Skripta_PRaM.pdf.
[3] Automatizace [online]. [cit. 2021-03-10]. Accessible from:
http://ust.fme.vutbr.cz/tvareni/img/opory/emm_mechanizace_a_automatizace_roboty_ru-
misek.pdf.
[4] Roboty - manipulation [online]. [cit. 2021-03-10]. Accessible from: https://www.arc-robot-
ics.cz/manipulace-kompletace.
[5] Cognitive robots [online]. [cit. 2021-03-10]. Accessible from: https://core.ac.uk/down-
load/pdf/30293515.pdf.
[6] Colaborative robot [online]. [cit. 2021-03-10]. Accessible from: https://www.la-
sertherm.cz/kolaborativni-roboty-fanuc-crx_awm_min.jpg?data=cMnKs0/tya1v7IX-
onrmV8ea96olvcj1cXOUyhXSFlwdhycJryO3RvV9m0HAZwMjAYMBcqXBn.
[7] Universal Robots [online]. [cit. 2021-03-24]. Accessible from: https://worldindustrialre-
porter.com/universal-robots-ur3-makes-table-top-automation-easy-safe-and-flexible/.
[8] Collaborative robot [online]. In: . [cit. 2021-03-24]. Accessible from: https://www.tal-
entica.cz/wp-content/uploads/2018/03/Picture1-5.png.
[9] Manufacturer [online]. [cit. 2021-03-24]. Accessible from: https://www.rg-robotics.com/10-
best-collaborative-robotics-companies-everyone-know/.
[10] Manufacturers [online]. [cit. 2021-03-24]. Accessible from: https://factoryautomation.cz/top-
10-vyrobcu-robotu-na-svete-kolik-instalovali-robotu/.
[11] Manufacturer [online]. [cit. 2021-03-24]. Accessible from: https://www.universal-ro-
bots.com/cs/produkty/.
[12] Roboty ARC Robotics [online]. [cit. 2020-11-29]. Accessible from: https://www.arc-robot-
ics.cz/manipulace-kompletace.
[13] Klasifikace robotů [online]. [cit. 2020-11-30]. Accessible from: http://www.elearn.vsb.cz/ar-
chivcd/FS/PRM/Text/Skripta_PRaM.pdf.
[14] Automatizace [online]. [cit. 2020-11-30]. Accessible from:
http://ust.fme.vutbr.cz/tvareni/img/opory/emm_mechanizace_a_automatizace_roboty_ru-
misek.pdf.
[15] Manipulační robot [online]. [cit. 2020-12-1]. Accessible from: https://www.fanuc.eu/~/me-
dia/corporate/products/robots/m710/generic/400x600/int-ro-pr-m71050e-l-1.jpg?w=400.
[16] Kognitivní roboty [online]. [cit. 2020-11-30]. Accessible from: https://core.ac.uk/down-
load/pdf/30293515.pdf.
[17] Automatizace 2 [online]. [cit. 2020-11-29]. Accessible from: https://factoryautomation.cz/zak-
ladni-pojmy-z-automatizace-32-terminu-ktere-musite-znat/.
[18] Kolaborativní robot [online]. [cit. 2020-12-1]. Accessible from: https://www.lasertherm.cz/ko-
laborativni-roboty-fanuc-crx_awm_min.jpg?data=cMnKs0/tya1v7IX-
onrmV8ea96olvcj1cXOUyhXSFlwdhycJryO3RvV9m0HAZwMjAYMBcqXBn.
[19] Robotizace [online]. [cit. 2021-03-10]. Accessible from: https://encyklopedie.soc.cas.cz/w/Ro-
botizace.

Page 35
[20] Handling robots [online]. [cit. 2021-03-10]. Accessible from: https://www.fanuc.eu/~/me-
dia/corporate/products/robots/m710/generic/400x600/int-ro-pr-m71050e-l-1.jpg?w=400.