cgy750 manual
TRANSCRIPT

1M23N24902
INSTRUCTION MANUAL

TABLE OF CONTENTS
��������� ��������������������������������������������� ��� ������������������� �����������8��� ������ ����������������������������������9�����������������������������������������������9���� � ������������������������������������� ��������!���� ������������������������������� "�������##� ������������������������������ $������%���#� �� ��&��� �%���#��������� 15���� ��� '�(���)*+$,������������������� -���.��(� ������������� ������������������� 21
��&�� � '������ ���������������������������� 23��/�#������� ������������������������������� 24����� � '�0���%����������������������������� �,����� '�.� ������������������������������� 32
��������)����6�������� '��������������� 34����%��� �)����6�������� '�������������� 39��7%������)����6�������� '������������� 41���:��(�6�������� '����������������������� 43��)������ ����� ��%%��� ������������������ $,�����:��(�������� ��%%��� �� ���������� 53����%��� ;7%������)�������������������� 58��<��%������������� ��%%��� �� ������- ���6�=�����%�'(��(��>%��������������������� -"�����?�#� ��0�� '�(��<����%�'(����� -$�������##� ����)����)�� ���� '������ 68����� '�A��#�%�.������������������������� -B�
��)���� ���6�������� '������������������� +,��.� � '�(��.�' ��� ���� ���������� +C�����%�'����� '�������� ������������� 82��)���� ���&������ ����������������������� 84��)���� ������������ '������������������ 86
����6���6�������� '���������������������� 88
2

TABLE OF CONTENTS
Meaning of Special Markings ���� ������%� �� �� � �� ��=���:(���� � �������D��(��=�%%�:� '�#��>�E�
DANGER - Procedures which may lead to dangerous conditions and cause death/serious injury if not carried out properly.
WARNING - Procedures which may lead to a dangerous condition or cause death or serious injury to the user if not carried out properly, or procedures where the probability of superficial injury or physical damage is high.
CAUTION - Procedures where the possibility of serious injury to the user is small, but there is a danger of injury, or physical damage, if not car-ried out properly.
: Prohibited : Mandatory
��������)����7F������� '������������� 91����%��� �)����7F������� '������������� 99��7%������)����7F������� '����������� ,����:��(�7F������� '�������������������� ,+��)���� ���7F������� '�����������������113
���:��(���� '�����#����<�D%����������118��G� >�'����#�� ���� ������������������121
Gyro : Instructions for gyro functionsGovernor : Instructions for governor function
Technical updates and additional programming examples can be found at:
www.futaba-rc.com/faq
3
PRECAUTIONS

PRECAUTIONS
WARNING Failure to follow these safety precautions may result in severe injury to yourself and others.
-ing this product.
BEFORE EACH FLIGHT:Always check the transmitter and receiver bat-
tery voltage to ensure they have enough remain-ing capacity to complete the flight.
Always exit programming mode before at-tempting to fly the model.
Only use the CGY750 with a 2.4GHz system such as the Futaba FASST™ system, or a PCM system. Use with an FM system is strongly dis-couraged since interference can cause serious operational problems.
Gyro operating precautions: Gyro
The CGY750 requires 5-10 seconds to ini-tialize when the power is turned on. Do not move the helicopter and do not move the tail rotor, aileron and elevator sticks during this initialization or the gyro may not initialize properly. Once the initialization process has been completed the swash servos and tail servo will move several times indicating that the CGY750 is now ready for flight.
Verify that the gyros are operating and com-pensating in the correct direction before each flight. If the compensation direction is incorrect on any axis the model will become incontrollable after take off.
Verify that the gyro is operating in the desired mode.
4

PRECAUTIONS
Verify that the gyro mounting pads are in good condition.
Verify that the gyro wires are not contacting the frame of the helicopter.
The servo type parameters within the CGY750 must match the type of servo you are using. In-correct setting may damage the CGY750 or the servos, possibly resulting in a loss of control dur-ing flight.
Always ensure that there is some slack in the gyro cables to help maximize performance. Always use the supplied gyro mounting pads to attach the gyro to the helicopter mechanics. Do not use a strap that encompasses the CGY750 sensor. This may affect the overall performance of the gyro.
Always allow the gyro to adjust to the sur-rounding environmental temperature before flight. A large temperature change during use will cause drift and other operational issues.
The gyro sensor and control box have a elec-troconductive coating. Do not allow any power leads or other wiring to come into contact with these items.
If you are switching between Normal Mode and AVCS Mode in flight, please keep in mind that you must have the gyro re-learn the center position after making a trim change within the transmitter. To memorize the new center position simply flip the gain switch on the transmitter three times between Normal Mode and AVCS Mode (Normal�AVCS�Normal�AVCS) within one second. The servo will center indicating that the new center position has been memorized.
When operating the gyro in AVCS Mode, all compensation and revolution mixing must be dis-
5

PRECAUTIONS
abled and any tail rotor or swash offsets for flight modes must be disabled.
When the CGY750 is operated in AVCS mode the tail rotor or swash servos will not center when tail rotor, aileron or rudder stick is released. This is normal operation for AVCS mode. The servos may also move to the extent while the model is being carried out to the flight line. Before take off, you must visually center the tail rotor pitch slider and level the swash plate by using the transmitter control sticks. You can also center the servos by moving the tail rotor stick full left, then full right, back to full left and then allow the stick to center within one second; similarly for aileron and eleva-tor servos.
Do not drop the CGY750 sensor onto a hard surface or subject the CGY750 sensor to a strong shock as this may damage the sensor.
Always use the supplied mounting pads or the Futaba replacement mounting pads available from your local hobby dealer.
Governor operating precautions: Governor
When the throttle servo is connected to the CGY750 the battery failsafe function within the CGY750 must be setup and enabled.
Throttle fail safe function (transmitter setting): Use the fail safe function for the channel that turns the governor on and off to set the fail safe position to the point at which the governor is turned off. With this setting, when the system en-ters the fail safe state, the governor will be turned off and the receiver throttle signal (fail safe posi-tion preset) will be output directly.
When using the condition hold function on the
6

PRECAUTIONS
7
transmitter, always set the throttle servo maxi-mum operating point to less than the point at which the governor is activated. If this is not done the governor may activate while in condition hold.
While preparing for flight or starting the engine always ensure the throttle remains below the gov-ernor activation point and do not select any flight modes that may activate the governor.
If you prefer to activate the governor while the model is still on the ground always ensure that you have at least -5 degrees of pitch in the model before activating the governor. This is necessary to prevent an unexpected lift off as the governor activates and the head speed increases to the
ensure proper governor operation. Due to the high level of vibration and centrifugal forces the magnet may come loose or the sensor alignment may change. Verify that the magnet and sensor are properly mounted every 10th flight.

WARRANTY & REPAIR SERVICE (IN U.S.A.)
�=� � ����==��%���� ���� � �� �����:(�%�� ��� '������������ '������)*+$,H��%������� �%�(��� ����� �#� �%�!��������=�(��������� ������#����%�����=���������(�DD�����%��H������ ���(����D������������ �����(��:�D����H�=�F�����%���(� �� #D���%�����D�%�:E�
www.futaba-rc.com or www.hobbyservices.com Fax (217)-398-7721, Tel (217) 398-0007
�=� ��� ���� �D%�� �� ����%��� (�� ����H� ���>� (������#� � � ��� ���'� �%� �� �� ���:�(� �� ��� � ��%������ ����(���'(H����������������� ��=�(����=!�%���� �%���(��=�%%�:� '�� ����� ��E�
numbers)
�� ��(��������������#����(���(���I�����D������������ �����������D�%�:E�
Futaba Service Center 3002 N Apollo Drive Suite 1
Champaign, IL 61822
8

INTRODUCTION
9
FEATURES
����#D� ������F���)���� � ��)���� ��� � � � ��D�F���/�'(� ������������� � � �� �F��#�%�� %�:� %�� ���������%�� �'��������D�%�����G�:����!%�H��#�%%���I��� ��%�'(�:��'(����#�%%� ��I�� �=� (��'���� � ��'���� ��� �� ��%%��H�""�F�JB�F� J##H� ��'����%�I��� �� JC�F��-����� '���(���%�:(��� ��%���&G70� �&�'� ���G�'(�7#�� '�0���%���H� (�'(�D��'( ����� ���� ������� �� �������� %�'(������ '���������� � ��6����� � ��7F����#� ���<(��D�������� '����=���� ���%���� '�� ��7F������� '����=���#�������� ������� '�������#:������ �D���������=��#����� ��:��D���������� �%� ��#����:(� �����:�(� (������ �%�����J�� ��=��������6����#���D%���& %��� ���� ���� ���� ����������D�:�� � (����6�� ��������� � ���)*+$,��� ��%�D�F�=���������� �
<(����D�©��)*+$,��������#D� ������F���(����� '�(�%���K���'����� ��(����������'���� ��� � �� ��D�F�� ��� �� '���'��.7.�� �.�����7%�����.��(� ���%�����#�� �� ���� ����' H� %��� (�'(��������������� '�������� ������ ������0��� ��%��%'���(#�������L� #�%�����(�����=��%%��(���(���� '�(�%��'����� � � ��I�H�:��'(� � �����=���#� ����<(���)*+$,�(���D�� ����#�I�����:��>�=���M�D��%����(�%��������

FEATURES
10
����������� ������ ����� ������������0��� ��%�%��������%�I�����#�%%�� ��%�:����!%�����F���'������ �����J �F�J �F�C�$##H�C'���������������� �������D%���=��� �� '�� '%�����%���������N;�� HJ,,���';����
����#���D%��:�(� $J,O��� �%�'��+,/I�H� $J,O��0�'��%��JC,/I�H�� ��+-,O��0�'��%��$-,/I����%�������������
���0�� ��������M�'(�#�������������:����&��� ��%%�:��(���)*+$,����� �������(����� ��%�= ��� ����� '�������� ���<(������%��� �#������������������� ��� ����������������� �
���� '� ��'�� �� ��%� �%'���(#���������� �� �� ����� � ������� ���H� �������� ������� H� � �� �#��(���:��� ��%�� �� ��M�'(��� ���� ������ ��������������������������� ���0���%����������!��%%��=���M�D��%����(�%����������� �%���������� ����#����� =��� (�%������� ������"$,�$$,H� -,,�+,,H� � ��+$,N�� �%� '�:�(� �� ��%�=��%�����������#�����#�>���� ���%���������������������� '���D� �
���������/�� J,H�/�� ",H�/��B,H�/"�,,H�� ��/"�"$��:��(�%��������
������ ������� ������ ����� ������������0��� ��%�%��������%�I����/�'(� ������������� � � �� �F��#�%�� %�:� %�� ���������������#������ ���� �� ���������������� �
������D%�� �=� '���� � '�(���� ������� =��#� ,,,���.�(��'(��,,,���.
����#���D%��:�(� $J,O��� �%�'� �+,/I�� � �� $J,O��0�'��%��JC,/I��(��%�������������
����������:����&��� � �%%�:�� (���)*+$,� �� �� ��������(����� ��%�= ��� ����� '�������� ��<(������%��� ���������'���� � '��=�(��(����������

FEATURES
CONTENTS
*����)*+$,�� �%����(��=�%%�:� '���#�� � �EType of set
SET CONTENTS
CGY750 Control Amp*Mini Screwdriver*Dust Covers (x3)
X X X X
Gyro Sensor*Mounting Pads (x3)
X X X X
Governor Sensor*Sensor Mounting Hardware*Magnet (x2)
--- --- X X
R6203SB Receiver --- X --- X
Extension Cord X X X X
X: supplied ---: not supplied
11
��)���� ����������%�� �G�#����#������%���D%����������'����������=��#� �,,�(��'(��,�,,����� '���'���� ��%��%'���(#����������#������ ����� ���.�'���� � '�
������%�� � �� ���� ��� ��#���D%��:�(� (��)K� ��<(���)*+$,� �%��� ������� �� ���� �%� D��>��%�������%�� ��� ����
��������� ��� ��.�F�##���.�#�#�������#%������ '� ��������� ��#�������:������� '�&G70�

CONTENTS
R6203SB Receiver
CGY750 Control Box
Mounting Pads
Adjustment Screwdriver
Gyro Sensor
Dust Cover
12

CONTENTS
Extension Cord:
Sensor Mounting Bracket
Magnets (2)
Revolution Sensor
13

SPECIFICATIONS
� ������� � ��������� � "� �PJB##Q� ������� ������ ,�C�� �PJ ##Q� ��������� �� ������ ,��,� �P+�$##Q� ! "���� � ��������� �+�� �P""##Q�� ������� ������ ,�C�� �PJ ##Q� ��������� �� ������ ,�-�� �P -##Q� #�"���� � ��������� ,�"+� �P J##Q�� ������� ������ ,���� �PC�$##Q� ��������� �� ������ ,��B� �P ,##Q� ��"���� � ��������� ,�"$B�I�P �'Q�� ������� ������ ,�JCJ�I�PC'Q� ��������� �� ������ ,� " �I�P"'Q� ������ "�$����"�� ��CK���C�"K�0�R� ��� ��%��� �� +,#�� &���'��&����(��)�� +,/IH�JC,/I�� ��$-,/I� � �������)����� %������� ���*����������� $J,S���+,/I�T�JC,/I�� � +-,O���$-,/I��� *������ �0H������H�"$,�$$,H��� � -,,�+,,�� ��+$,N� ���� ����������� �� ,� /I��-��#�� � �7 '� ����.�� �*+�������� U� #���&����� "�� H,,,��H,,,��#� ������ "�,)�������� "V���� �V�� � �� ,V����N"$V��� � �����&���)��0�'��%����� ������ ��%�� & �����.�����7%����#��(� ���%� � ����#���.7.���)���� � /�%%��==����� ���� � "�����$�������� "�� W HJ,,�0�'��������� � ���� ���)����R�<(�� ������ '� ��%�'�� �(�: �� %�� ���%���� �� (���)*+$,���%:��������=��(��������������H�������H���%������ �����H� �:��(� � �� � ���(��� �%���� ��� ��#��� � ������� ������ ��%%��� ���������D%���=������� '���(����%�'������%� ������
14

RECOMMENDED SERVOS
-./�&�0�#���������������&���� Futaba S9254 Digital Servo Heli: FUTM0224 (280Hz/1520μS) Futaba BLS254 Brushless Heli Servo: FUTM0524 (280Hz/1520μS) Futaba S9257 EP Heli Digital Servo: FUTM0667 (280Hz/1520μS) Futaba BLS257 EP Brushless Heli Servo: FUTM0527 (280Hz/1520μS)
FUTM0226
Futaba BLS251 Brushless Heli Servo: FUTM0521
REPLACEMENT & OPTIONAL ITEMS
Futaba PC Interface CIU-2: FUTM0951
Extension 200 mm:
Extension 55 mm: Extension 80 mm:
Mounting Pad: 1x22x22 mm (10)
15

CONNECTING THE CGY750
OLED Display-
ters and status information.
Edit Keys
-justment screwdriver to press the buttons.
16
(1)
(2)(3)
(4)
(5)
(6)
(7)
(8)
R�<(��� ���'��#� �(�:�� (��������� �� � ���� �� D�:�� � (���)*+$,� � ����������H������H������ ������
R��=�(��'���� ���� ��%�#����= ��� ����������D%���:(� ��� '� (�� P)���N</�Q�#���� (� � (�� (��%�� ��' �%� ��� �� ������%����(��</;7J��� ���� �� �(���)*+$,���� �(�����������#����� ���(�� (��%�� ������ �� (�� ������������(� �%�� � (�� ������������ �� (���)*�</;7J��� ������
R��(� � (�� �:��(�#���� ��� ��� ��/"�FF�#���H� (��</� ��#� �%� ��� �(� '��� ��J �� �%������ ���� � � (��� ����H� (��'���� ���= ��� ����� (�D����

CONNECTING THE CGY750
17
(1) Gyro Sensor:
*Insert the sensor connector until it is firmly locked.
(2) Rsen (Revolution sensor):
(3) S.Bus:
receiver with the supplied extension.
(4) AIL Output:
(5) ELE Output:
(6) PIT Output:
(7) TH Output:
(7) E2 2nd ELE Output:
(Swash mode: H4-00 or H4-45)
(8) RUD Output:
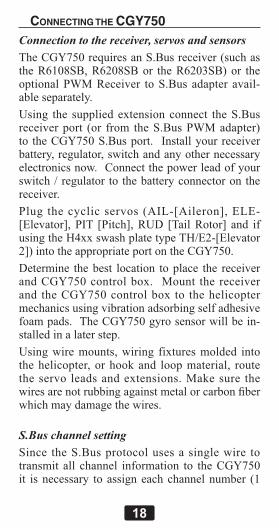
CONNECTING THE CGY750Connection to the receiver, servos and sensors<(���)*+$,���L������ ���6��������������(����(���- ,C�6H��-J,C�6���� (���-J,��6����� (������ �%���.���������� ����6�� ������� ����%��D%���������%����� '� (�� ���%���� �F� ��� � �� ��� (����6����������� ���� ���� =��#� (����6����.����������� (���)*+$,���6������� � � ��%%��������������D����H���'%���H��:��(�� ��� ���(��� ����������%���� ���� �:����� ���(����:���%�����=������:��(�;���'%���� ��(��D������� ������ �(������������%'� (�� ���%��� ������� ���G�P��%��� QH�7G7�P7%�����QH� ��<� P���(QH���0� P<��%�����Q� � �� �=��� '�(��/"FF��:��(��%�������</;7J�P7%������JQ��� ��(������������������ �(���)*+$,���0���#� �� (��D��� %����� � ���%���� (�� ���������� ���)*+$,� �� ��%� D�F�� �.� � (�� ���������� �� (���)*+$,� �� ��%� D�F� �� (��(�%�������#��(� ������ '���D���� ������D� '���%=���(������=��#��������<(���)*+$,�'������ ����:�%%�D��� ���%%���� ���%����������� '�:����#� �H�:��� '� =�F����#�%���� � ��(��(�%������H� ��� (��>� � �� %����#�����%H� ����(�� ������ %����� � �� �F� ��� ���.�>�� ���� (��:��������� ���DD� '��'�� ��#��%�������D� �!D���:(��(�#�����#�'��(��:������
S.Bus channel setting�� ��� (����6��������%� ���� �� �� '%��:���� ���� �#�� �%%� �(� �%� � =��#��� � �� (���)*+$,��� ��� ��������� �� ����' ����(��(� �%� #D��� � �
18

CONNECTING THE CGY750(��'(� -�� �� = ��� � ���(� ��� ��%��� H� ���(H���%%�����H� '�� H� ��%� '�� H� �%�� '�� H� ��#H�'��� ;�==��:�(� �(���)*+$,��� ��%�D�F���<(����=�%��)*+$,���6���(� �%�����' #� ���(�%��:��>�������%��:�(� �%%���D�� �� �#����H� �=� ��� �F������ ��� � �����D%�#���%����� ��=��� �� (����6������� ��=� (��#� �%� �� ��;����=�� ���(� �(� �%� #D���=������(�= ��� �
��=� ���� �� �#���� ����� �� �==��� � �'(��(� �%�� �� ������� �%%� �=� (�� = ��� �� �� ��������D%�� ��������� (���)*+$,�:�(�� (��)K�& ;&==H���%�)�� �� ��7%��)�� ��(� �%���� ��������(� �� ��(����= ��� ������ ����������� ��������������(���(� �%� #D�����P�A/Q�:�(� �(���)*+$,���6��#� �������D%��(��= ��� �� �����(����� '���%��� �����(��)*+$,�#� �� �����
� �(� � (��)K�& ;&==� �(� �%� ��� �� ���H�(��'���� ���� ;�==��� ��%����(� �%���D��(��P���>��:��(Q�= ��� ��
� �(� � (�� ��#�����%� ���7%��)�� � �(� �%������ �� ���� (�� ������ '�#���� �A&�;�K���� � ��'�� ���%�� �� �D�� ��� � � (�� ��������������G� ;�7G7�6�����#� ����� �D���� '�(��0���N;��>����:(� �(��= ��� ��������%�����
Using the CGY750 with a electric helicopter
DANGER It is necessary to remove the pinion gear
from the electric motor or disconnect the mo-tor from the ESC before powering the model
19

CONNECTING THE CGY750up for setup or bench testing. Electric motors are extremely powerful and the capable of de-livering the power instantly causing injury to yourself, others, or the surroundings.
�=� (���)*+$,� ���D�� '� � ��%%��� � �� � ��%������(�%������� ���#���:� � �� �� ������ �� ��� '�(��7�����(��P</;7JQ��(��%��;��%������J�������=� (���)*+$,�� �6�=������� '�(������#����#����(���� �� �'����=��#�(���%������#������������ ���(��#����=��#�(��7���D�=������:���� '� (��#���%��� (��!��� �#��� �& ��� (��#���%�(��� D�� ���:������� ���'��� �� (��'����#����= ��� �� ���������P)*�&N</�Q��<(�������(���)*+$,�����������'����� ��(��%�������<(���)*+$,�:�%%���#�%�������(��(��%����' �%�=��#�(�� ��������� (��'(� �� (��</;7J����� � � (���)*+$,�& �������7�������� �������(���)*+$,����#�� ��#�%��� �%%� ��������� �� �#���� ������<K�;�7���;��7K�;�7<�����������7���� ������ ��� �����������##� ���������(��7�������:�(� (���� �� �'���� ��#����� =��#� (��#���� ��� ���������(� '�(���D�� �����������%��
20

MECHANICS PREPARATIONS
WARNING Newer high end servos and other radio
equipment are capable of placing large de-mands on the power systems in use today. When using a regulator you must ensure that the regulator is capable of delivering the cur-rent demands of the equipment you have se-lected. In addition to this make sure the wiring and switch you have selected are capable of handling high current draws.
on a flybarless helicopter. Always ensure your receiver battery is fully charged before each flight.
Even though the CGY750 is a high perfor-mance gyro and governor it will be necessary to ensure that the helicopter mechanics are also in optimum operating condition. Please use the guidelines below and address all is-sues before installing and flying the CGY750.
-tempt to fly the CGY750 using a wire driven tail rotor system.
pulleys, belt, bearings and shafts are in proper working condition. If any of these items are damaged or worn they must be replaced.
The linkage rod, tail rotor bell crank, pitch slider and tail rotor grips must operate without friction to obtain the best performance from the CGY750. Binding in the tail rotor control linkage will de-
21

MECHANICS PREPARATIONS
crease the performance of the CGY750 gyro and this may also shorten the servo lifespan. Please take the time now to ensure the tail rotor system on your helicopter is working correctly, without fric-tion or binding.
-mance. All rotating components on the helicop-ter should be balanced to minimize vibrations in flight. Ensure that your motor is running smooth and all vibrations have been addressed before installing and test flying the CGY750.
Gyro sensor replacement:
specifically for the gyro sensor included. Do not attempt to use another CGY750 sensor with the control box as performance will suffer due to being out of calibration. The calibration process must be completed by an authorized service center.
If your sensor needs replacement, please send -
ter for repair.
22

OPENING SCREEN
23
K���=�� (�� �%%� �=� (�� �� ���� �� ���� ������� D��:�� � (���)*+$,H� ��������� � ����:��� ���%�����=� ���� (�%������� ��� �� '� � � �%������#���� =�������%��� ���#����(���� �� �'���� �:�=�����=����=� (��� ��� (�� =���� �#�� (��(�%������� (��� D�� ���:������� ��#���� (�� ������ ��#�� � �� %� >�'����� ����� � ��#�'� '� (�� �������� � ��:����� (���� �#���� � �� �%%�:� �� �� � ���%%�I��� �<� � (������������ ������ ���(��M�'(�D������ ���%%�:�(��(�%������� �� ��#�� � ��%%�:(�%�� (���)*+$,�� ���%�I���<(������%���:�%%�!����(�:�(���0� #D����=������)*+$,�� ��(�����#:����K����� �
�=���(���)*+$,�(�����:�������(������� �:�%%��(� '�����(�:�� �� �#��� ��=���(�%�����������=��#� '��� ���� ����M���� �<(��� � ������� (�� (��� ���%�I��� �������������>� '��%����� ��(��(�%��������#����#�� ����=��%����%%����(���� ��%%����� �����#� �� (�� � '���� �� ��� ������ � =��� ���(��F���

HOME SCREEN
24
& ��� (�� � ���%�I��� ��������� (��� D�� � ��#��%����(��/�#������� �:�%%�D������%������ ��(�����%���N���%�������������:�%%�#����������%��#���� �L��>��������� ��=�(���)*+$,���������(��P)���N</�Q�#��������=� (��/"�FF� �:��(��%��� ����(��� D�� � ��%�����(� �(��'���� ���:�%%�D������D%���� ��(������� �:�%%�%��>�%�>������D�%�:�� �������<(������%���:�%%����%��(��'(�� ���(�:�(������ ���GH�7G7�� ����0�'�� ��
Initial Home screen1. Axis indication 2. Gyro operation mode
3. Gyro gain
4. on/off switch
5. Yaw rate comp.
7. Setting Menus
6. Battery voltage
(b) Aileron gaindisplay
(c) Elevator gaindisplay
(d) Gyro onlymode
1. Axis indicator Gyro
<(���:�%%����%��������:������ ���� ���(�:�(���F������GH�7G7������0��� ��(������ �'�� ���%��
2. Gyro operation mode Gyro
<(���� ���������(���P�Q�=����K������PAQ�=���A��#�%������� '�#������ � �=� (�� P�Q� ��� �(�: � � � � ��������%����(� �(�������� ���%�����==���� �����%��� � '�(���� ��������� ��(�%��D����#�%�����##�����%��

HOME SCREEN
25
RUD AVCS Mode at 100% gain
RUD NOR Mode at 100% gain
Neutral offset at AVCS mode
�(� ��� '�(���K��������� '�#����(���������:�%%� �� ����� ���:(� � (�� �� ��%� ���>� ��� ��%������� � �=���� ���� ���� ��� (������������ '��������D�=�����>��==������� �#����(��������������� ��%����>������=%%��F� ��%�=�T���'(������T���: ��:����� ���%%�:�(���� ��%����>������ ����� ���:�(� ���� ������ ����������=� �#�� (� � ������ =��� (�� �F���:�%%���� �������� ��������� �������F�#�%���=����#����(����%���������>�=%%�%�=H�=%%� ��'(H� =%%� %�=H� =%%� ��'(� � �� �%%�:� �� �� ��#��D��>����� ���:�(� �� ������ ��(� �(������%���:�%%��(� '�����(�:�P��������Q�� ��(����%������������:�%%��� ���
Return servo to center position
�(� ��� '� (���K��������� '�#���� � �� �=� ��#��(� '���(����D�� �#����� � � �� �F��� (� � (�� ����%� ������ �#�� D�� ����� � ��#�#���I���D�� (���)*+$,�� �<����� (��� ��#�%�� �(� '�� (�������� '�#���� :����:�(� �� ������ �� �=����F�#�%��A��#�%�X��K���X�A��#�%�X��K����� ��(������%���:�%%��(� '����PRRRRRRRRQ���� ������(��(������ ����>������� �(���D�� �#�#���I������(�� �:� ���%�������� �
Read and memorize the current neutral
position.

HOME SCREEN
26
3. Gyro gain Gyro
<(���� �������(������ �'����'�� �=���(���F��� ����� �(���F���� ������������� �
4. Operating condition Governor
<(���� �������:(�(���(��'���� ������������ '�P&AQ����P&��Q�
5. Yaw rate comp. Governor
<(��� � ������� (�� (��)���� ��� ��:� =���� =��:����= ��� ����� �D%���
6. Battery voltage<(��� � ������� (��D�������%�'���<(������%���:�%%��(� '�� �� �(�:� PG&��6�<Q�� ��� (����%�'��(���=�%%� �D�%�:� (��6����� =��%� ��=�� ��%�'�� ��� '��6����
7. Setting Menus��(� '� (��� D� �:�%%� �F�� (�� ��#�%� ������ '�#����� ��� ���(����� '��#� �#����
RPM display Governor
<(��D�������%�'������%�����#����%%���(� '�����(��� '� ����.�����%���� ���(��� '� ������ � � 'H� � �� ��� �� �� D�������%�'������%���� ���

HOME SCREEN
27
(��� '� ��(����������� � '���<(����.�����%����� �D����(��� (��(������������� (��� '� ������������ �� '�� �(����� '�� �(������%�� �����%���#������� '�=� ��� �(��'���� ����F����#� ��
Home screen options�(� � (��(�#�� ����� � ��� �(�: � (��#���� PNQ�� ��P�Q�>������ �D�����������%��(��D��#�%� ��(��'(�(��=�%%�:� '���#�Y�6�������%�'�H�.�F���.H�7 '� �� � �#�H�&G70�����%������� �H�&����� '�.���H���%%�����#�F�##�����%��H�� ��7%����������#�F�##�����%���
1. Maximum RPM Governor
���#� (��(�#�� ����� ������� (��#���� PNQ� D� �� ��� �� �(�:�#�F�##� �����������.� P.��#Q���<(��P.��#Q���%�����#�� �� ��� �%�����%������D�������� '�(������PNQ����P�Q�>���=�����%����� ������ ����<(��� = ��� ��%%�:����� ���(��>�=�������������� '���� '�M�'(�
2. Engine runtime Governor
���#�(��(�#������� ������� (��#����PNQ�>��� :�������(�:�(���� '� ��� �#������%�����<(���#���(�: ���� (�:� %� '� (�� � '� ��(��� D�� � � � '�� �<(��� ����� �#%����� �#��� � �� (����%�� ���#�� �� ��� � �#�#������<�������(���#�����#�%��������(������PNQ�

HOME SCREEN
28
���P�Q�>���=���#����(� �� ������ ��� ��(���#���:�%%������D��>���,�
3. OLED display options [default: Saver]
�(� � (�� P�����Q����� � ��� ��%����� (������%���:�%%���#��=���-,����� ����=� � �������� �& �����D� � ������������ �(���)*+$,��� ��%%���D�F�(��&G70�:�%%��:��(�D��>� �� =%%� D��'( ����� �<(�� P�����Q� ���� �(�%������� ��������:���� ���F� ��(��%�=���=�(�������%������(� �(��PG�'(Q����� ������%�����(������%���:�%%���#�� ���=%%�D��'( �������%%��#���
4. Operation mode [default: Gyro+Gov]
<(�����%����(�������� '�#�����=�(���)*+$,�
WARNING If the operating mode has been changed
then the CGY750 must be reset by powering down and then powering back up.
P)���N)��Q�6�(�(��'������ ��(��'���� ��������������� �%�P)���N</�Q�<(��'���� ��� ������� �%� � �� (��'����� ��� ��� ����D%���� �<(�� (��%�� �(� �%� =��#� (���������������������(��'(���(��P</;7JQ������ �(���)*+$,�P)���N/"Q�.��D�� ��%�����:(� ��� P/"�FFQ� �:��(��%��� ���� ��� ��%������ �<(��� ����D%��� (��'���� ���

HOME SCREEN
29
� ��(��%������������ ��(��P</;7JQ������ �(���)*+$,� ��� �:� (�� ���� �� Z7%�����[� P7JQ� ���������
1. Roll rate maximum display Gyro
0���%���� (��#�F�##� ��%%� ���� ������������ '�M�'(���<(�����%����������D��>���,�:(� �(���)*+$,������:�������
1. Elevator rate maximum display Gyro
0���%���� (��#�F�##��%������ ���� ������������� '� =%�'(�� �<(��� ��%�� ��� ����� D��>� �� ,�:(� � (���)*+$,������:�������
WARNING Display
Governor warning display Governor
<(��:�� � '� ��#D�%� ��� ����%�����:(� � (��'����� ��� ��� ����������� '���:������ �##�����%���:��(� �� �� �� ���� � (�� (��� (��'���� ��� �����D%��� � �� (�� ��#D�%�:�%%� ����������� ��(� � (���

WARNING DISPLAY
30
:�� � '� ��#D�%� ��� �(�: � (��'���� ���:�%%� D������D%��� �%� (�� �� ���� �(��� D�� � � ����==���<(�� � '� ��#�� D�� ������:�(� (��'���� ���� ����==�
Sensor error Gyro
WARNING The helicopter must remain perfectly still
during the initialization process or a [Sensor-ER] sensor calibration error may occur.
�=�� �������:������������� '�� ���%�I��� H���:���� (���)*+$,���: �� �� %�� �� ���� =��� -,� ����� �����K���=��(��(��'������ ����%�������������%���� ����� �� (���)*+$,�� ���:��� (���)*+$,��� �'�� � � �� �%%�:� (��(�%������� �� ��#�� � ��%%� �%�(��� ���%�I��� �(���D�� ���#�%�����=� (��� ���D%�#��������� �%����� �� ��� ���� ���'�� �� ��( ���%� ������ �� ��� �(�� �� ��� � �=��#��� � �� �D�� =� �� � � (��D�'� � '��=� (���#� �%��
Low battery
WARNING The [Low Batt] warning is displayed if the

WARNING DISPLAY
31
receiver battery voltage falls below the [BAT/FS] voltage set within the CGY750 � Gover-nor � Expert menu. If this condition lasts for more than one second then the Battery Fail Safe function activates and the throttle servo is brought back to idle. This is done to warn you that the battery capacity is dangerously low and you must land immediately.
�� (��� ��� � (�� (��%�� �� �D�� ����������D��D�� '� '� (�� �� �#���� �� ��%� ���>� �%%� (��:���D��>�����%��� ��(� �(��(��%���� ��%�:�%%��� �� ��������������=����,����� ���(��6��������%���=��= ��� �:�%%���������'�� ���L��� '������������(������������=� ���������
Memory writing indicator
WARNING Do not power off the CGY750 when the
Memory writing symbol is displayed.
�(� ��� ��� '� ��� �(� '���:�(� � (���)*+$,�(�� �:���%��#��D��:��� ���#�#����� ��(��Z.�#����:��� '� � ������[� ��� ����%�������� '�(�������������<(���#����>������:������ ���� ��(����:���#�� �� D�� �:��(����==� ��� '� (������������=� (����:��� ��� �:��(����==� ��� '� (��:��� '���������(� ��%%��=�(����� '��#���D��%����

SETTING MENUS
32
WARNING Always exit the Setting Menu and return
to the home screen before flying your model. The gyro operation is disabled within sev-eral of the settings menus to help with setup tasks.
Always check the operation of the CGY750, verify that the controls are operating the correct direction and ensure the gyros are correcting in the proper direction for all axis before attempting to fly the model.
<(������ PNQ� � �� P�Q� >���� ���� ���� �� ���'���(��'(� (����� '�.� �Y� P��0�)���QH� P��G�)���QH� P7G7�)���QH� P����/��QH� P)���� ��QR�� ��P��6�Q�6�����#� ����& ���(����������#� �����(�: �������� ����%�����(��#����PNQ����P�Q�>������(�:�(�� �F������� '���#�����������%��<(���F����#� ������� ���������F����D��������� '� � ��(�%�� '� (��#���� PNQ� ��� P�Q� >��� =��� � ������ ��� �<�� �F�� (�� ���� �#� � ��#�%�� '��D��>� �� (��6�������� '��.� �=��� (��= ��� ��=��� �F�#�%�H� P��G�)���� ��6����Q�� � �������� � ����%����� (��#���� PNQ� ��� P�Q� >��� �%� (�� (�#������� �����(�: ��%���������(����� '�.� �����'��#�=�������#��%���%��� '��=�(��/�#������� H�6������ ��7F����#� ��
R�<(�� P)���� ��Q� ��� '�#� � ��� �� ����%����� �=� (��&����� '�.����(���D�� ���� ��P)���N<(�Q���� �=� (���:��(��%�������(���D�� ������(��/"�FF�����

SETTING MENUS
33
Push DATA+/– key
Push MODE +/– key
Push MODE +/– keyfor 1 second
Maximum RPM
Homescreen
Engine runtime
OLED Setting
Operating mode
Maximum Roll Rate
Maximum elevator rate
(Basic) (Expert)
Gyro (RUD)
Gyro (AIL)
Gyro (ELE)
Swash
Governor

RUDDER GYRO BASIC SETTING
34
<(�� P��0�)���Q�6�����#� � �� �� �� �%%� �=� (��= ��� �� ���������������(���)*+$,���%�'����=���������� ��%�����=�%%�:�(���������=���� ���%����E
������(��Z����/��7�K&��A�<�GG�<�&A��A0��7<��[������ �%����� �(���#� �%���� ��%%�� �������(������������#�����%%��=� (����������#�� ����%��� �������� �� ��%� ����� ������� � �� %� >�'��� =��#� (�������� �� ����� � � �������D%�� ��#�'����%%�� �%�'��������#���%���D������� ����� ��%� (�������� ����(���D�� ������:�(� � (���)*+$,�����:���(������#���� ���%%�:�(���)*+$,���� ���%�I���A���'�����(��P��0�)���Q�6�����#� ������� �� =�%%�:����� �J�� P��0�)���Q�6�����X������<���<�#������%�� �%���� (�� ������ ��#�� �� (�������� � ��(�%�� (�� %� >�'������� (�� �� ��%�D�%%�� ��%%�:� ���� ���� P��0�)���Q�6�����X�)*�0����(�%�� %�'(%�� (�%�� '� (�� ��%� ����� %� >�'��� �� (�� ������ ��#H�#���� (�� �� �#���\����%� ����� ���>� �� (�� ��'(� � �� � ���� (��(�� ��%� ����� ���(� �%�����#����� (���������������� ����=� ������������������ �#���\����������= ��� �� �(����%�������(� �%���(� �(���)*+$,����� �(��������%�#��= ���� � (�� ������:�%%� �%:���� ��#�� � �� ������ �� (��'���� �� ���� �� %� '������������ � � ���%%� (����������#H�� ��� '�(�� (���� ��%�D�%%� %� >�'�� ������=��%������� ���%��� �� (��
RUDDER GYRO BASIC SETTING
35
��%� ����� ��(� ����� � ��%%�:� ���� �"�� P��0�)���Q�X����G�#�� �� ��� (��� ���� � ����%�=��� ���(�������� H� � ��� '� ��D� �� '� �������� ��� ��%%� (�� ������ ��#� ����:�� ���%���� (��%� >�'��� �� (�� �� ��%� D�%%� � � (�� ��������#����6�=������������ '�����=�� (�� �%%� �=� ������� '�� ���� ������� � �� �(��>� =��� D� �� '�(��'(�� (�� � ���� �� '���=� ������#����#� �
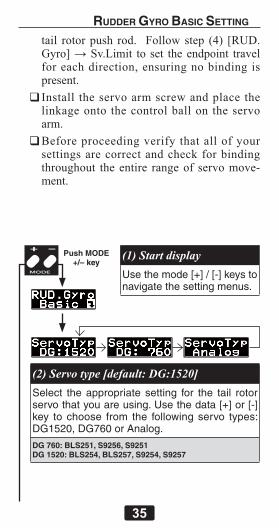
(1) Start displayUse the mode [+] / [-] keys to navigate the setting menus.
(2) Servo type [default: DG:1520]Select the appropriate setting for the tail rotor servo that you are using. Use the data [+] or [-] key to choose from the following servo types:
DG 760: BLS251, S9256, S9251DG 1520: BLS254, BLS257, S9254, S9257
Push MODE+/– key

RUDDER GYRO BASIC SETTING
36
WARNINGVerify that the tail gyro compensates in the
correct direction before flight. If the compensa-tion direction is incorrect the model will pirou-ette uncontrollably, at a very high rate.
(3) Gyro direction [default: Normal]This parameter controls which direction the CGH750 (yaw axis) will compensate when the helicopter rotates. Hold the tail rotor linkage over the linkage ball on the servo, pick the heli-copter up by the main shaft and rotate the me-chanics counter-clockwise. The CGY750 should compensate by adding clockwise rotation pitch to the tail rotor blades. If the CGY750 compen-sates by adding counter-clockwise rotation pitch to the tail rotor blades, then it will be necessary to reverse the Compensation Direction setting by pressing the [+] or [-] data key.
WARNING-
mine the proper servo settings. The servo type parameter within the CGY750 must match the type of servo you are using. Incorrect setting may damage the CGY750 or the servo. Incor-rect setting may also result in a loss of control during flight.

RUDDER GYRO BASIC SETTING
37
(4) Limit setting [default: 100%, setting range: 50~150%]When the CGY750 is in the Sv.Limit param-eter the gyro will no longer operate and the tail servo will always center when the tail rotor stick is released.
Always exit setup functions before attempt-ing to fly the model. Before each flight always ensure that the gyros are operating and compensating in the correct direction.The Servo Limit parameter within the CGY750 is used to set the mechanical limits for the tail rotor servo. To obtain the best performance it is recommended to set the limit in the CGY750
the servo arm length to set the mechanical endpoints. After that has been completed use the servo limit parameter to make small adjust-ments that could not be made mechanically.
optimal.
�Sv.Limit menu and slowly move the rudder stick to the left or to the right maximum extent and use the data [+] or [-] key to increase or decrease the maximum throw respectively. Ensure that the pitch slider does not reach the maximum extent and cause binding.
WARNINGWhen using the CGY750 for the first time,
or when making mechanical changes involving throw, you must check and set the servo limits again to prevent binding.

RUDDER GYRO BASIC SETTING
38
(5) Flight mode [default: 3D]Selects the flight mode. Always try the “Sports” flight mode first and if you determine that the feel is not aggressive enough or if the pirouette
mode. The “Sports” Flight Mode will satisfy most pilots.
The flight mode is changed by pushing the data [+] or [–] key.
Sports = 540 degrees per second

AILERON GYRO BASIC SETTING
39
<(�� P��G�)���Q�X�6�����#� � �� �� �� �%%� �=�(��= ��� �� ����������������(���)*+$,���%%��F���=���������� �
(1) Start displayUse the mode [+] / [-] keys to navigate the setting menus.
(2) Gyro direction [default: Normal]This parameter controls which direction the CGY750 (roll axis) will compensate when the helicopter rolls. Pick the helicopter up and roll the helicopter to the right. The CGY750 should compensate by adding left cyclic to the swash plate. If the CGY750 compensates in the wrong direction, then it will be necessary to reverse the Compensation Direction setting by pressing the [+] or [-] data key once.
Push MODE+/– key
WARNINGVerify that the CGY750 compensates in the
correct direction before flight. If the compen-sation direction is incorrect the model will roll uncontrollably, at a very high rate.

AILERON GYRO BASIC SETTING
40
(4) Gyro working mode [default: CMT]The available choices are CMT, Normal or AVCS. The CMT mode will allow you to select either AVCS or Normal mode by using the Aile-ron Gain Channel. The Normal mode will always
always operate in AVCS Mode. Use the data [+] or [-] key to select the desired working mode.
(3) Gyro gain [default:100%, ranges:0~120%]The top line shows the Aileron Gyro Base Gain and the bottom line shows the actual working gain as set within the transmitter. If the Aileron Gain Channel is set to [INH] within the CGY750 [S.Bus]->Basic setting menu, then the remote transmitter gain adjustment is not available and the actual working gain is set by using data [+] or [-] keys within this parameter.

ELEVATOR GYRO BASIC SETTING
41
<(��P7G7�)���Q�X�6�����#� ��� �� ���%%��=�(��= ��� �� ��������� �� ��� �� (���)*+$,����(��F���=���������� �
(1) Start displayUse the mode [+] / [-] keys to navigate the setting menus.
(2) Gyro direction [default: Normal]This parameter controls which direction the CGY750 (pitch axis) will compensate when the helicopter pitches forward or backward. Pick the helicopter up and rotate the nose of the helicop-ter downward. The CGY750 should compensate by adding aft cyclic to the swash plate. If the CGY750 compensates in the wrong direction, then it will be necessary to reverse the Elevator Compensation Direction setting by pressing the [+] or [-] data key once.
Push MODE+/– key
WARNINGVerify that the CGY750 compensates in the
correct direction before flight. If the compen-sation direction is incorrect the model will flip uncontrollably, at a very high rate.

ELEVATOR GYRO BASIC SETTING
42
(4) Gyro working mode [default: CMT]Selects the gyro working mode. The available options are CMT, Normal or AVCS. The CMT mode will allow you to select either AVCS or Normal mode by using the gyro gain channel. The Normal mode will always operate in Normal
AVCS Mode. Use the data [+] or [-] key to select the desired working mode.
(3) Gyro gain [default:100%, ranges:0~120%]The top line shows the Elevator Gyro Base Gain and the bottom line shows the actual working gain as set within the transmitter. If the elevator Gain Channel is set to [INH] within the CGY750 [S.Bus]->Basic setting menu, then the remote transmitter gain adjustment is not available and the actual working gain is set by using data [+] or [-] keys within this setting menu.

SWASH BASIC SETTING
43
<(��P����/��Q�X�6�����#� ��� �� ���%%��=�(��= ��� �� ����������������(���:��(��%����������� ����������%%��:��(��%���#�F� '�= ��� ��
(1) Start displayUse the mode [+] / [-] keys to navigate the setting menus.
Push MODE+/– key
(Confirmation screen)
(2) Swash type [default: H3-120]
-ing the Data [+] key once will show the next
-ing confirmation of the change. If the Data [+] (Set) key is pressed again within one second, the new swash plate type is selected and the “?” confirmation will disappear. If no confirma-tion is made within one second, the display will revert back to the prior swash plate type and no change will be made.
WARNINGAll of the swash plate parameters are reset
when the swash plate type is changed. Please proceed through the entire setup process be-fore attempting to fly the model.

SWASH BASIC SETTING
44
WARNING-
mine the proper servo settings. The servo type parameter within the CGY750 must match the type of servo you are using. Incorrect setting may damage the CGY750 or the servo. Incor-rect setting may also result in a loss of control during flight.
(4) Helicopter Presets [default: 600-700]Please select the most appropriate setting for your model. The available presets are 450-550,
The size profiles change many of the options within the CGY750 to tailor the gyro towards a certain helicopter size and the way that it reacts in flight. When using this option the CGY750 will be adjusted to provide a consistent feel for various helicopter sizes.* Please refer to the back of this manual for a complete
listing of the helicopter profiles and the flight mode presets.
(3) Servo type [default: Analog]Select the appropriate setting for the cyclic ser-vos. Use the data [+] or [-] key to choose from the following servo types: DG1520 or Analog.

SWASH BASIC SETTING
45
(5) Flight mode presets [default: 3]The flight mode presets are used to control the overall feel and aggressiveness of the CGY750 in flight. The adjustment range is 1 through 5. Flight mode 1 is the least aggressive and is intended for beginners, sport, scale and even
pilots who are not very aggressive. Flight mode 5 is intended for advanced pilots who like an aggressive feel. This is a personal preference option and it is recommended to test fly using flight mode 2 initially.
Available Flight Mode Presets:
1 - Least aggressive, good for beginners
4 - Fairly aggressive
5 - Extremely aggressive

SWASH BASIC SETTING
46
(7) Elevator servo reverse [default: Normal]This setting is used to set the operational direc-tion for the Elevator CCPM servo. The easiest way to set up the CGY750 is to observe which direction each servo needs to move when the collective stick is moved towards positive col-lective pitch. If the servo is moving the wrong direction, then press the data [+] or [-] key to reverse that specific servo within the GY750. Once the collective is operating in the correct direction check the cyclic controls. If the cyclic controls operate in the wrong direction, reverse
CGY750.
(6) Aileron servo reverse [default: Normal]This setting is used to set the operational direc-tion for the Aileron CCPM servo. The easiest way to set up the CGY750 is to observe which direction each servo needs to move when the collective stick is moved towards positive col-lective pitch. If the servo is moving the wrong direction then press the data [+] or [-] key to reverse that specific servo within the GY750. Once the collective is operating in the correct direction, check the cyclic controls. If the cyclic controls operate in the wrong direction, reverse
CGY750.

SWASH BASIC SETTING
47
(8) Pitch servo reverse [default: Normal]This setting is used to set the operational direc-tion for the Pitch CCPM servo. The easiest way to set up the CGY750 is to observe which direc-tion each servo needs to move when the col-lective stick is moved towards positive collective pitch. If the servo is moving the wrong direction, then press the data [+] or [-] key to reverse that specific servo within the GY750. Once the col-lective is operating in the correct direction check the cyclic controls. I the cyclic controls operate
for that function within the CGY750.
(9) 2nd Elevator reverse [default: Normal]This setting is used to set the operational di-rection for the 2nd Elevator CCPM servo (only used for the H4-xx Swash plate types). The easiest way to set up the CGY750 is to observe which direction each servo needs to move when the collective stick is moved towards positive collective pitch. If the servo is moving the wrong direction, then press the data [+] or [-] key to reverse that specific servo within the GY750. Once the collective is operating in the correct direction, check the cyclic controls. If the cyclic controls operate in the wrong direction, reverse
CGY750.* This function is only used with the H4 swash plate
types. Otherwise the function is disabled.

SWASH BASIC SETTING
48
(10) Servo neutral adjustment [default: 0μS]TIndividual neutral adjustment for each of the swash plate ser-vos. All servo arms should be perfectly perpendicular to the control linkage with the collective stick positioned at 0 degrees col-lective (usually centered). The ELE2 neutral adjustment only works if the H4-xx swash plate type has been selected.
To use this function select the servo you would like to adjust and press the data [+] or [-] key to position the servo as desired.
(11) Swash AFR (rate adjust-ment) [default: 50%]
direction and amount of throw allowed for each function. Think of this as the maximum travel endpoint for each function, except you want to set this to the maximum amount of cyclic/collective pitch you would like available to the CGY750. Use the Data [+] or [-] key to make an adjustment.
If any of the functions operate the incorrect di-

SWASH BASIC SETTING
49
(12) Swash ring [default: 100%]This function is used to prevent binding of the swash plate servos when the transmitter control stick is moved toward a corner (for example, full right and full aft cyclic). The default setting
helicopters. In some cases you may have to de-crease the value to prevent binding. Press the Data [+] or [-] key to adjust the value.
rection, then reverse the sign of the value. For
the servo, neutral and reversing adjustments should be made within the CGY750 and the transmitter functions should be left at the default values.
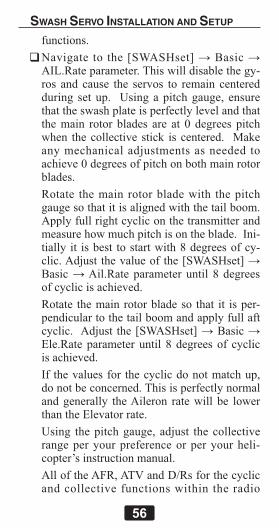
-pendent on servo arm length and head geom-etry, so it will be necessary to use a pitch gauge to make adjustments. For the cyclic controls it is recommended to start with 8 degrees of pitch change in any one direction. Adjustments to this value can be made after the 1st test flight once you determine the cyclic rates and the overall gyro behavior.
travel allowed and this value will be similar to what you normally fly other helicopters with. A
+/-10 to +/-12 degrees. Beginners may want to -
grees instead of -10.

GYRO SENSOR INSTALLATION
<(��'���� �� ���� �(�%��D��#� ���� � �� ��'����%�=��#H� �� %���� -� � P $J##Q� �:��� =��#���A�����7 '� ��� �� ��� �� ��������� ��#� � (��'���� ����(��#�� ��(�=��=�(��(�%�������D������������#���� � (�� (��#� � '�������(��� � ��� ��'�����%�������=���������(�%�������#� =�����\��� ������ ��=�������##� ����#� � '�%����� ���<���!� (��'���� �� ���H� � ��� '� (�� (�� �� ������� � ����=����%�' #� �:�(�(��(�%�������� �(����%%�� �����(��F�����<(����D%��=��#�(��'������ �����#�� �F�� �:���� (�� =�� � ��� (�� ����� �=� (��(�%������� �� ��� (��� ��� (�����(� �F���� �� ��#����%�' #� �:�%%��������%�����=����=��#� �����������������#���� ���� ����(�������(� '�����%�' ���������%��& ��� ��� ���� ����� � �����(� '� ��� ������%���%�' ���� �� (�� (���� ���� %������ �D������� ��(��'���H�'���(����� ��#� � (��'������ ���� ��(��(�%��������� '�� ���=�(�����%����'���������������(��'������ ����%������(���)*+$,��� ��%�D�F� � ���%'� (�� %���� � �� (��'���� �� ���� ������K���=��(��(���� ��������!�#%��%��>���� ��%����
Gyro Sensor
axis
50

GYRO SENSOR INSTALLATION
Important: The CGY750 gyro sensor must be mounted so that the roll and pitch sensing axis are in alignment with the helicopter. Any misalign-ments over 1/2 of a degree will cause a loss in performance. Please take extra care in this step to ensure the optimum flight performance.
TROUBLESHOOTING
If any issues are noted during flight (such as drifting, inconsistent hold or inconsistent control rates) then please review the following trouble-shooting recommendations.
1. Always verify that the tail rotor and swash plate mechanisms operate, and that the drive system
Sensor must be perpendicular to the main shaft.
the tail boom and the pitch axis must be perpendicular to the side frame.
51

GYRO SENSOR INSTALLATION
is in proper working order.
2. Electromagnetic interference could be caus-ing the problem. If you feel everything is set up correctly and that the helicopter is vibration free, then consider moving the gyro sensor to a new location away from servos, ESC and drive motors.
gyro systems. Even though the CGY750 gyro sensor is the most vibration resistant gyro sen-sor available, eliminating vibrations will always improve performance. Throughout extensive testing it has been found that the CGY750 gyro sensor performs best when the sensor is mounted rigidly to the airframe. This is mainly
-ommended to avoid using soft foam pads as this may allow the gyro to bounce around on the roll and pitch axis, causing instabilities and possible loss of control during flight.
All components of the helicopter must be bal-anced and operate in a smooth manner. The newer gyro sensors are so sensitive (and extremely accurate) that even something as simple as a bad ball bearing can cause enough vibration to cause the sensor to read incor-rectly. Main and tail rotor blades must also be perfectly balanced. Ensure that your engine is running smoothly and properly tuned. If you feel that all of the criteria has been met, then it is recommended to relocate the gyro sensor to a different position on the helicopter and test fly again to look for improvements.
52

SWASH SERVO INSTALLATION AND SETUP
<(���)*+$,� ������� -� ��==��� � �:��(��%������������(�: �D�%�:�
Swash Servo installation�0���#� ��:(��(��=� (�� �:��(��%��� ������(�: �#��(����� (�%������� � �� � ��%%� (���:��(��%��� ����������� (�����'��#�� ����������(�%������\��� ����� �#� �%��*����� �#�����(�%��D���������(����=�%���� '�� � �� (�� �:��(��%��� ���� ��%�����
ELE
PIT AIL
H3-120
ELE
PIT AILH3-140
ELE
PIT AIL
H3-90
ELE2
ELE
PIT AIL
H4-00
ELE2
FRONT
ELE
PIT
AIL
H4-45
ELE
PIT AIL
Normal
53

SWASH SERVO INSTALLATION AND SETUP
:�(�(���� �#�����(�%��D����� ��A��#�%��/� ������� '%��������#�������%%����.�#�F�� '� ��� ��� �� � ��(� �%���:�(� (���)*+$,�� �� (�� �� �#���� = ��� �� �(�%�� �� D������� �<(���F��� = ��� �� ����%� ����� �� �D������:�(� (�� �� �#���� D� �����(� '���%������(�����.�#�F� '��(�%��D�������� ��(� �%���D��(���)*+$,������������ ��#�������H��<K�� ��0;����:��(�= ��� ����� ,,U� � ���%%�� =��� ���� � �� �%%� �D��#���(�%��D�������,����:��������� �� �#���� � ��(�%����������%%�:� (���)*+$,� �� � ���%�I��� ����� (���)*+$,� P����/��Q�X�<���� = ��� � ����%���(���:��(��%�������(��#��(�������(�%��������A���'��� �� (��������<��������#���� � �(���)*+$,� � �� ��%��� (�� ������ ���� (��#��(������� ������#� =�����\�� ����#�#� ���� �����=�(�������� ����DH���%���(��� �%�'� ������ ���� �� ����� � ��#�'� '� (���������� ���(��>�:�(����������\��#� =�������������#� ��(��������������A���'��� �� (�� P����/��Q���%A<�� ���� '��� (��� �#���<(���:�%%�����D%�� (��'������ ������� (�����%��� ������� �� ��#�� � � � (���� ��������� �� � �=���������� '�� ��%������#���� (� � ��:�%%� D�� ��������� �� ��#����(���� �� �'���� �:���� ����� ��� (��#�����=��#�(��7�����& ��������������� �(��(��������#���� �� �� ���%����:��� �� (��#�� � ����� D%����H� �#������%�� � ��%%� ��������#��� ��(���������� ��%�:%��#����(����%�%������ ���>� �:������������� ��%%������ � ��
54

SWASH SERVO INSTALLATION AND SETUP
����=�� (�� ���(� ������ ���#��� '� (���������������� ��� � ���������%%���������(�� � �=�� �����������#��� '�(��:�� '�������� H����(��P����/��Q���������= ��� ����(� '��(��������� ���
� & ��� (�� ������� ���������� '� � � (�� �������������� � =��� (�� ��%%������ �� ��%� ����������� �� �'�����H� (�� �F�����������%�:%��#���� (�� ��%%������ ���>� �� (�� �� ��� ������� � �����=��:�(� ����� �� �#���\��������0���%��� = ��� � �=� �����D%���� �<(���:�%%� D���� ��������(��,���%%������������ �=���������<�#������%�� � ��%%� (�� ������ ��#��� �� (�����%��� ������� � �� � ���� (�� (�� ������� �������=��%�� %���%�� � �#�%%� ��?�#� �� �� �D��#������ '� (�� P����/��Q�6�����X���G;7G7;�&G�A�� ��?�#� � =��� ���(� ������ �=� ���������� �.� � (�� %� >�'��D�%%� � �� (�������� ��#����� ���� (�%������\�� � ����� �#� �%�� �� � ��%%� (�� ������ ��� �� �����:�� �����(��������.���� (�� =��:���� ;� �=� ���%��� ���>� =��:����� ������=�� (�� (���:��(��%��� �%�� =��:�������=� (�� �:��(��%��� �%�� (��:�� '�������� H�(� � ��:�%%� D�� ��������� �� �������� (�� ��' ��=� (��P����/��Q�7G7���������#�����=����F�#�%��N$,�:�%��D���#���$,����.����(��%�=�;���'(����%������>���(����'(�� ������=��(�� (�� �:��(��%��� �%�� �� (�� ��'(�� �=� (���:��(��%����%��%�=H�(� ���������(����' ��=�(��P����/��Q���G���������#����
� �����! �%��(��>H�����=�� (�� (���:��(��%���#����� � � (���������������� ������������>�#���#� �� =��� (�� ��%%H� ���(� � �� ��%%������
55
SWASH SERVO INSTALLATION AND SETUP
= ��� ���A���'��� �� (�� P����/��Q�X�6�����X���G���������#�����<(���:�%%�����D%��(��'������ � �� ����� (�� ������� �� ��#�� � �� �������� '� ��� ��� ���� '� �� ���(�'�'�H� � ����(��(���:��(��%���������=��%��%���%�� ��(��(��#�� � ����� D%����� ���� �� ,� ��'����� ���(�:(� � (����%%������ ���>� ����� ������ �.�>��� ��#��(� ���%� ��?�#� �� ��� ������ ����(�����,���'������=����(�� �D�(�#�� ������D%�����
� ����� (��#�� � ����� D%����:�(� (�����(�'�'�����(��������%�' ���:�(�(����%�D��#������%��=%%���'(����%���� �(���� �#����� ��#������(�:�#�(����(����� �(��D%������� ����%%�� �� ���D��� ������:�(�C���'������=�����%������?��(����%���=�(��P����/��Q�X�6�����X���%����� ����#���� �%� C� ��'������=����%��������(������
� ����� (��#�� ������D%������� (�� �� ��������� ���%�����(����%�D��#�� �����%��=%%��=����%���� ���?�� (��P����/��Q�X�6�����X�7%����������#���� �%� C� ��'����� �=� ���%��������(������
� �=� (����%���=��� (�����%������ ��#��(��H���� ��D���� ��� ����<(���������=��%�� ��#�%�� ��'� ���%%�� (����%��� � ����:�%%� D�� %�:���(� �(��7%����������
� ��� '� (�����(�'�'�H� ��?�� (�� ��%%�������� '������ ���� ���=��� ������ ���� ���� (�%�������\��� ����� �#� �%�
� �%%��=�(�����H��<K�� ��0;���=���(�����%���� �� ��%%������ = ��� ��:�(� � (�� ������
56

SWASH SERVO INSTALLATION AND SETUP
�(�%��D������� ,,U�����(������ �(��D��������������#�%��H�D������ ����������������(��'������ ����#�� ���� �������� ��D�=������#�� '���M��(��#���%����(��>� (�� ���%��� � �� ��%%������#���#� ��=���� ������ ��� ���=�� ������ �����%��������=�����(���:��(��%�����?�#� ����������%�����:�(� �(��D��>��=�(���#� �%����(� ��� '�#���� ���'��%��������� ��:�(��������������(����(�%� \�D�� �������������#��#���#��(� ���%� ����' �M�:�����#���>���:�(� �(������:�%%������� ������ ��� �������D�������#����(����D�=����M�'(�
57

AILERON/ELEVATOR GYRO SETUP
Finishing the setup:
Using the T8FG, T12FG, T12Z and 14MZ Re-mote Gain Functions (roll, pitch and yaw)
����#����D�� �� �#����� �� �� � �F�%�����'�� � = ��� �� =�����%��� H��%������� ����:���%����� ��=��� �� ���� �� �#���\�� � ����� �#� �%�� �����' � (��)*�H�)*����G�� � ��)*��7G7�� �(� �%��:�(� � (�� �� �#�������(� �(���)*+$,�P��6�Q�X�6�����#� H�����' � (�� P�)AQH� P7)AQ�� �� P�)AQ� �� (��������������(� �%��
J�<(��'���� = ��� �:�(� ����� �� �#�����(�%�� %��� �%%� (����'�� � �(� �%�����?��#� ���� �D��#����=��#�:�(� �(���= ��� ���<(��'����= ��� ��� ���%%��D������' �������������:��(�������� ���� �����==���'��������?��D�%���� � �%����� ��=��� �� ���� �� �#����\��� ����� �#� �%�=���=�(�������%��
��� ���%%��(����G�� ��7G7�'�� ���(�%��D�������$,�� ��(�������� '�#�����(�%��D�������PA&�Q���& ���(����#���������(���D�� ���#��%���H� (�� =%�'(�#���� �(�%��D�� �(� '����������P�K��Q�
58
WARNINGVerify that the gyro compensates in the cor-
rect direction for all three axis before flight. If the compensation direction is incorrect, the model will roll, flip, or pirouette uncontrollably at a very high rate.

AILERON/ELEVATOR GYRO SETUP
Setting the CGY750 gains by using endpoints or manual adjustments
�� �=� ���� �� �#���� ����� �� ������ (�� ���#���'�� � ��?�#� � �� ��� ��%%� �����D%�� ����� :���������(� �%��� � (�� �� �#���� ��#�>�� (�� ��?�#� ��� �����' � :�� �����(� �%�� �����=�� (�� (���� �(� �%�� ���� ������' ������ ��������D�� �� �:��(���� ���%��:�(� � (�� �� �#����� ��� (�� P�6��6����Q�X��)A�� ��P�6��6����Q�X�7)A��(� �%����(��������������(� �%�������(��� ����� ���?�#� �:�(� ����� �� �#���� =��� (�����(� �%�� ��#�>�� (��'�� � ��?�#� �� � ��(����������= ��� �:�(� �(���� �#���������(��#����P�K��;A&�Q����� ���� ��:�(�(�� �� �#����#��� �%���D������ �� ��(�������==��� � '�� �� D������� � =%�'(�#��������%����� ��=��� �� ���� �� �#���\�� � ����� �#� �%�=���=�(�������%��
J�� ���%%��(����G�� ��7G7�'�� ���(�%��D�������$,�� ��(�������� '�#�����(�%��D�������PA&�Q���& ���(����#���������(���D�� ���#��%���H� (�� =%�'(�#���� �(�%��D�� �(� '����������P�K��Q�
59
WARNINGVerify that the gyro compensates in the cor-
rect direction for all three axis before flight. If the compensation direction is incorrect, the model will roll, flip, or pirouette uncontrollably at a very high rate.

AILERON/ELEVATOR GYRO SETUP
Manual gain adjustment
���=�������������� ��%������ ���(� �%��=������� �=� ���� �� �#���� ����� �� ������ �F��%�����'�� � ��?�#� H� (� � �� ��� �����D%�� ����?��(��'�� �#� �%%��:�(� �(���)*+$,������ D�(� (�� P�6�Q�6�����X��)A� � ��P�6�Q�6�����X�7)A���P�A/Q���<(��'�� ����?�#� ������ �:�#����D��� ��� '�(��P��G;7G7Q�6�����X�)�� �� �������� '�(������PNQ����P�Q�>����
J��<(��'�� � ��?�#� �� ����#����D�� � ��� '�(�� P��G� ;�7G7Q�6�����])�� � � �������� '�(������PNQ����P�Q�>����
���� ���%%��(����G�� ��7G7�'�� ���(�%��D�������$,�� ��(�������� '�#�����(�%��D�������PA&�Q���& ���(����#���������(���D�� ���#��%���H� (�� =%�'(�#���� �(�%��D�� �(� '����������P�K��Q�
WARNINGVerify that the gyro compensates in the cor-
rect direction for all three axis before flight. If the compensation direction is incorrect, the model will roll, flip, or pirouette uncontrollably at a very high rate.
60

TAIL ROTOR SERVO INSTALLATION AND SETUP
Following your transmitter instructions, pro-gram your transmitter as follows:
�7 �D%�� (�� ������ '���� = ��� �:�(� � (���� �#���������(��'����#�������K����)*��:�(� �(���� �#���������(����#���'����'�� ���C,U��K���� �(���� �#���� =��� (��A��#�%� � ��/�%�� =%�'(��� ���� ��� �����$,U��K���=����%%���%������ ���� ������� Z��� '�<(��)�� [� ����� �%����� �(���#� �%�=���#��������%�������(��<��%�������<K;7����� ,,U�=���D�(�%�=�� ����'(������0;����+$U�=���D�(� %�=�� ����'(��<(���:�%%� ������ (��#�F�##�������� �����.�>�� ��?�#� �� �� (������%��� � ��� (��� ���%����M�'(�(���D�� ���#�%�������� �������##� ����(������ ��,U���=� �� '��F���� �(����%�������(� �%��
WARNING Do not connect the tail rotor servo to the gyro
until the servo type has been selected. Operating the servo using the incorrect setting may damage the CGY750 or the servo.
& ���(���������������#�%���H�� �(�������������:���� �� ���%%�:�(��'������� ���%�I�����%%�:�(�� � ����� ��:�(� � (�� ZRudder Gyro Basic Setting[������ ��=�(��#� �%�� ����%���(���������<���� (��#��(��� (�����������(�����(��� ���������:�����: �(�����������=��� �:��
61

TAIL ROTOR SERVO INSTALLATION AND SETUP
�� ��%%�(����%������������� ��(��#��(� ����� �� �� ��� (�� ������ �� (��'�������#����(�� ������ ��#� ����:� =��#� (�� �������<� �(�� �����������:���� �� ���%%�:� (��'���� ��� ���%�I���7 ���(��ZRudder Gyro Basic Set-ting[�#���� � ��'�� �� ����#���� �"�� Z������G�#����� ���� '[���(�%��� �(��������%�#��������#����(��������:�%%���#�� ��� ������
90°
��%����� ��������������������#�� ��(��������� ��� ����(�� �� �������� ���%��� ��(����%��������(��������(�: ����#����(�� �����������=�(����������#���� ��%%�(���� ��%�D�%%����%����:�(�����(��%�������� ��(����������#������%��'����%������#���%�� ��� ���� ��:�����#���%��:�� ����#�#� ���%��� '� (��D�%%� ��$##� =��#��� ����& ���(���� ��%�D�%%�(���D�� �� ��%%����%����(����#�D��>�� ��(��������� ��� '�(������������ ���%�����(����%��������(������ ��%%�(����������#�����:��
13.5mm
62

TAIL ROTOR SERVO INSTALLATION AND SETUP
���%%�:� (�� � ����� ��:�(� � (�� ZP��0�)���Q�6�����X��K�G�#�[� ����� � � �� ���(��������%�#���=���(����%�������������/�%��(����%������%� >�'�������(��%� >�'��D�%%�����������#�'� '�(���������& ���(��%�#��������������� ��%����(��%� >�'��� ��(��%� >�'��D�%%���(� ��� '��K���#���� (�����##����������(����,V��=����(�:�(�(����%������������ �� ����� � ����� �%%� �=� (�� ����%�D%�����(��� '��� �(����%�:�(��D� �� '���<� �(�������������:����==����F�����'��#�#� '�#����� ��(� �� �(�������������:���D��>�� ��& ���(��'����(�����#�%����� ���%��I��� �#���� (�� ��%� ����� ���>� �� (�� ��'(�� �(���� �#����� ������=��(����'(���%��>�:���� ����� �� ��%� ����� ���(� ��� � ���� ��(�� ��%� �����D%������ �=� %�=� ��%� ��������(� ���� ���� �� (�� ��%� ����� D%����H� (� � ��:�%%�D�� �������������������(����%�������(� �%�� �(���� �#���������>� (�� (�%������� �� D�� (��#�� � �(�=�� �� ����� (��#��(� ���� �� ����%��>:�����=��#� (�� �����<(��'�����(�%����#�� ����D������ '��%��>:��������� ����(���(����%������D%�������=�(��'������#�� �����D������� '� �� ����%��>:���� ����� ����(� �� (����%� ����� D%����� (� � ��:�%%� D�� ��������� ���������� (�� Z)����0������ [� ��� '�:�(� �(��'���� ���=��� �� (�� ZGyro Basic Setting[������ ����%����� �(���#� �%��
������������� ����������������� �����������exclusively, then the rudder gyro setup is now complete.
63

BEFORE FLIGHT CHECKLIST
��%:��������=�� (�� (�� �� �#���� � ������������D�����������=%%���(��'����
��(��>� (��'����#� � '� ���� � �� � ����(�� �� ��� � � '���� �� ���� �� �.�>�� ���� (��'�������!�#%��#� �����(��(�%��������
�K���=��(��(��'����:��� '�(�����#���%��>�� ���� ���%%�:����������%�����=�(��#�� �=��#���
���:���� �(���� �#����� �������������%%�:�(��'������� ���%�I���
��(��>�� ������=��(��(����������������#�����������������%��=���(����%������� �����%����������
�K���=�� (�� �%%� �=� (�� ������ ��#� ����:�� ����� ��%%���
�7 ����(��(�����%���� ����%���������������� ��D� ��:(� �#�������(��=%%��F� ��=�(��(��:�
�K���=��(��(��'������������� '�� �(���������#���� P�K������A��#�%Q� � �� (�� (��'�� ������������%�����
�<����%%��� ��%��� ������=��(��(���#����� �(���������������� ��
�K���=�� (�� (��'������#�� ����� � � (����������������� � =����%%� (�����F���D�=����M�'(���=�(����#�� ���� �������� ����� �������(��#���%�:�%%� ��%%H� M��H� ��� ������� �� ��%�%�D%�H����������(�'(������
64

ADJUSTMENTS DURING THE TEST FLIGHT
WARNING Always level the swash plate using the cyclic
stick before applying throttle and spooling the main rotor blades up. During takeoff small cor-rections may be necessary. If you make large corrections while the helicopter is on the ground, it may tip over since the helicopter is firmly on the ground and the gyros are overcompensating due to the lack of movement.
Some helicopters may have a tendency to resonate/shake during spool up. Always leave the helicopter on the ground until this resonance or shaking goes away. If this issue continues, it is recommended to try some rubber skid stops or take off from a softer surface such as grass. Vibrations contribute to this ground resonance. Verify that everything on your model is balanced correctly.
��������������#�M�'(��(�%��D�����=��#���� ��� �:��������:(� �#�>� '������(� '�����(��#��(� ���%���?�#� ��� �(��(�%������� ��K���=��(��(����G�� ��7G7�'��������������
* When the CGY750 is used with a ESC or BEC and a power switch is not used there is a possibility that the intermittent connection as you connect the flight battery may cause the CGY750 initialization to fail. Always ensure that the gyro has initialize properly by verifying that the gyros are compensating as the helicopter is moved. It is recommended to use a power switch on the power supply line to avoid this possibility.
65

ADJUSTMENTS DURING THE TEST FLIGHT
$,U�'�� � � �� (��A��#�%� ������ '�#������<�>�� (��#���%��==� � ����(������ ����� (���� �#������#��D������#�(��#���%���� '�M�'(�
J��& ��� (��#���%� ��� ��##����H� %� �� (��#���%� � �� �(� (�� � '� ���==�� �.���� (��'���� '�� � �:��(� =��#�A��#�%� ���K���#������ �#��� � � �� ���� ���.�>�� ���� (�� ���%������� ��=���D�(���%��� �� ���%����������#�#���I����
R��=� ���� '����'�� � �:��(� ��� � � (�� =%�'(�#�����:��(H����=��#�(����#�M�'(�� ��%� ��(��#���%����(�(��� '� ���==�� ���(� '��(���)*+$,�������� '�#�������K����A�:�� �(���)*+$,��==�� ��D��>�� ��<(�� ���%������� ��=���D�(���%��� �� ���%������:�%%�D��#�#���I���
R�.� �%�)�� ���?�#� E� ����=��#� (�� ��#�M�'(�� ��%� ��(��#���%�� ��(� (��� '� ���==�� ��(� '��(���)*+$,������� '�#���� ���K����A�:� � �(���)*+$,��==�� ��D��>�� ��<(�� ���%������� ��=���D�(���%��� �� ���%������:�%%�D��#�#���I���
����=���(����#�M�'(H��(� '��(��'����������� '�#���� ���K���� �� ��� =%�� (��#���%��'�� �� � � ������� (��'�� �� � (�� ��%��� � � ���%������ '���� �%� ��� ����� �� ����%%��� H�(� ����������(��'�� ��%�'(%��
R�� � ������=� %��>��=� (�� �(� �%� =��� '����'�� � ���� '�� �(���� �#���H���?��(��'����'�� �� �(���)*+$,�
Rudder gyro adjustments:<(��<��%�������������0;��= ��� �:�(� �(���� �#���������������?��(��������������=�(��(�%�������������F�#�%���� ,,U�0;�H�:�(�(��'���������������#���H�(��(�%�������:�%%�
66

ADJUSTMENTS DURING THE TEST FLIGHT
��(����� �� "$,���';����������� ����:�(� (�����>��� ����F� ���=����:�%��%�>��(��#���%����������=����H�(� �� �������(���������0;����=����:�%��%�>��(��#���%�����������%�:��H�(� ����������(���������0;���<(��'�� � �(�%��D�� ������� �%� (�� ��%� D�'� ��������%%���L��>%����%�����%%���<��%���'���& ���(������ �(���D�� ���(�����H�������(��'�� �D�������%���=������ �� �����M��(��#���%��'�� ���(��>� � �� ��� (��'�� � =��� ���(� =%�'(�#�����<�����%%��(��'�� �:�%%�D��%�:���=���(����%���� �� ����%����J�M�'(�#�������� �� (��(�'(���(�����������<(��'�� �=���(��/�%���� ���� ��� ��%���D��(�'(���(� ��(���M�'(�#������� ���(��(�������������%�:���� ��(��� '� ����D���� ����#� �#�I����<(�� ��%� ����� ����H� ��%� ����� ���(� �� '�� � ����%�D%���� %� '(��%����� %��'������ � ���(���� '����##���%���������=��#� ����<(��'�� ���%���� �������������%%�� =��#�#���%� ��#���%� � ��(�� �F��� ��%�� �(�%�� �� �%��� �� ���� � � (�����%��� ��=�(��'���\�����=��#� ����/�:�(��'��������������� '�M�'(� ��� (��� %���� ��� ��=�����
67

RECOMMENDED GYRO GAIN SETTINGS
Recommended gain settings:
SizeAIL/ELE Gyro
450-550
750-more
68

USING NORMAL MODE
.��� ��%��� ����� ���� �� '��K���.����� �=���� ���� ?�� ���� '��H� �� ��� ����##� ���� (���������K���.���� �F�%����%�� =��#� (�� �����A��#�%�.�����������%����������������(������=��#� ���D� �=��� �=��K���#������(� ��� '��K���#�����%%� ��##� '��=� (�� ��%� �����#�����%%��(� �%���D��(��'������=�����(�%��������������A��#�%�.���� (� � �%%� ��##� '� � ��#�F� '�#��D������D�������=� ���:�%%� D���� '� (��A��#�%�.���� ��%��� ���=���������������.�����(� ���=�:��(� '�����(������:�%%� D�� ����������<(�� ��%� ����� �(�%��D������� ,���'������=���%���������(������ �������L���:(� �(����%����������������� ��������(��%��>:���� ���� '�#�� � ����� D%����� (���#�� �� ,���'������=���'(� ��%� ��������(�:�%%�D�� �������������� �������L���� ������� ���(�����:�%%�D�� ��������������(����%��������#�� ���� ��������%�� �#�F� '�= ��� ���=������� �#������(�%���� �������L����%��������������� �#����� ����� �#� �%� =���#���� � =��#��� �� �(�:������(�������=� ���������� �� �:��(�D�:�� �A��#�%�.����� ���K���.���� � � =%�'(H� ���#�� (���� (��'���� ���%��� � (�� �� ��� ������ � �=���#�>�� '� �� ��#� �(� '��:�(� � (�� �� �#�����<��#�#���I�� (�� �:��� ��� ������ � ��#�%�� =%���(��'�� � �:��(�� � (�� �� �#���� (���� �#���D� :�� � A��#�%� .���� � ���K���.�����A��#�%��K���A��#�%��K����:�(� �� ������ ���<(��������:�%%��� ��H� � ����� '� (�� (�� �:��� ��������� �(���D�� �#�#���I���
69

GOVERNOR BASIC SETTING
70
<(��� ���� (��'���� ��\�� = ��#� �%� = ��� ���<(��#� � (9) Servo limit point setting�#�� D�����!���
(1) Start displayThe editing menus are scrolled by pushing the mode + or – key.
(2) Revolution setting [range: 1000 ~ 3000 rpm]Setting the main rotor revolution. This is calcu-lated by engine revolution with the gear ratio of the main shaft.
����� ������!������ ��"��#�.�>������(������%�������(� '����� H�JH���D��#���� '�(���:��(�����(�����������.������(������� �D����(� '�(������N����^�>�����$�#���������� ������� �&�'*���+� �������=�%� '���� ���#�F� '� ��� � � (��< "._�� ��< J�)� = ��� �����%�D���� (������� � =���H� � ��(� ���������.���� '��� �D������=���(��
Push MODE+/– key

GOVERNOR BASIC SETTING
71
(3) Gear ratio [default: 8.00, range: 1 ~ 30]Input the main rotor gear ratio by pushing the data + or-key.
Notes:
speed and actual engine speed will be differ-ent.
-copter instruction manual. If the helicopter in-struction manual does not give the gear ratio, calculate the gear ratio as follows:
Rotormain gear
N1
Enginepinion gear
N2
� )���������`�A ;AJ
whole number.

GOVERNOR BASIC SETTING
72
(5) Stick switch [default: 30%]The governor can be activated by throttle stick position. Move the throttle stick to the on position and push SET key, the on point is
function is inhibited. When the governor on/off switch is inhibited, the stick switch is automati-cally turned on.
(4) Servo selection [default: Analog]Select the throttle servo type. Digital servos of-fer the best response. The type is changed by pushing data + or – key.
When governor is turned on and off by trans-mitter throttle stick<(������ ��� ��� ��� (�� (�� '���� ��� �� �D��� ���� � � ���==�:�(� (�� �� �#���� (��%�����>��<(��=�%%�:� '�������D���(���������� �
WARNINGThis parameter must match the type of ser-
vo you are using. Incorrect setting may damage the CGY750 or the servo, possibly resulting in a loss of control during flight.
GOVERNOR BASIC SETTING
73
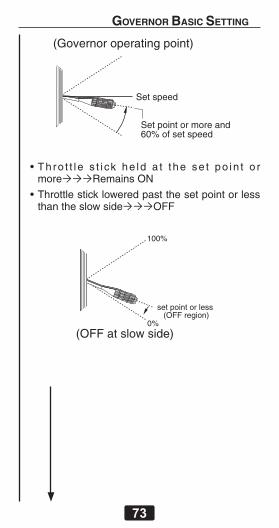
(Governor operating point)
Set speed
Set point or more and 60% of set speed
more���
than the slow side���OFF
100%
0%
set point or less (OFF region)
(OFF at slow side)

GOVERNOR BASIC SETTING
74
(6) Governor on/off switch [default: Inhibit]It selects the governor activate switch if addi-tional switch is used. Pushing the SET (Data+) key activates the function. The on/off direction is changed by pushing the SET key again. The
key.
When governor turned on and off by switch ��� '� (�� �:��(� �� (��&A������� � � ��� �(��'���� ����<(�� =�%%�:� '�������D��� (��� �������� �
Governor can be turned on and off by a switch.
���ON
position���
���OFF

GOVERNOR BASIC SETTING
75
(7) Battery failsafe setting [default: Inhibit]The governor goes into the failsafe mode when the battery voltage is below BFS.Volt. When activated, the governor is deactivated and the throttle servo is moved to B/FS position. Move the throttle stick to idle position. The B/FS
-
Move the throttle stick to B/FS position as de-sired. Push set key to confirm the setting. Push-
(8) Yaw rate compensation [default: CW/TOP]This works the revolution compensation dur-ing pirouette. Set the mode to match the gyro installing direction, either CW/TOP, CW/BOTM, CCW/TOP, CCW/BOTM by pushing the Set key.
At the governor only mode, this function is in-hibited.
CW: clockwise CCW: counter clockwise TOP: normal side BOTM: reverse side

GOVERNOR BASIC SETTING
76
(9) Servo limit point settingIt sets the throttle servo maximum throw. It is fundamental for governor operation. It must be set prior to other function setting. It must be set when the throttle linkage is changed or trim is changed as well.
For this setting, idling position is set first, then high position guided by the display. Push the data + or – key to memorize. “*Finish*” is dis-played when the setting is completed. “Error” is displayed when the setting position is out of
through).
When using the CGY750 for the first time, or when making changes in the throw of a servo, always perform the limit setting operation.
(10) Limit point testingIt tests the limit point if they are correct. Push data + or – key. Throttle servo moves to setting point followed to the display.

GOVERNOR BASIC SETTING
77
(11) Revolution sensor testingIt tests the output level of the revolution sensor. Turn the engine by hand, and check the output level. The display indicates the current level on left side numbers, maximum level on right side numbers. The output level needs to be more

MOUNTING THE MAGNET AND SENSOR
78
.���=�� (�� ���%� '� =� � � �� � ��%%� (�� ����������#�' ��� �����(�(��#�' ������ ������(��� �'� ����(�������� ��(�: �D�%�:�
Cooling fan
Magnet (Embedded in cooling fan.)
Sensor (Attached to engine flange through a stay.)�(� �� ��%%� '�(���� ����#�'� ����(��#=M�������H��%�����=�����(�� ���%�������#� � '�
Magnet operating side check�6�� '� (��#�' �� ���� (��� ���=� (���� ����� ���(��>�(�������� '������
MagnetSensor
� <(������(���������:(��(�(������%�������%��� �������� � � (�� Z����%�� � �� ���� ��� '[�#� �:�(� � (�� ZGovernor Basic Setting[������ ����%����� �(���#� �%��� ��%%�(��#�'� ��:�(�(��������=��� '�(���� �����.��>�(���������=�(��#�' ��:�(���=�%������ �
MOUNTING THE MAGNET AND SENSOR
79
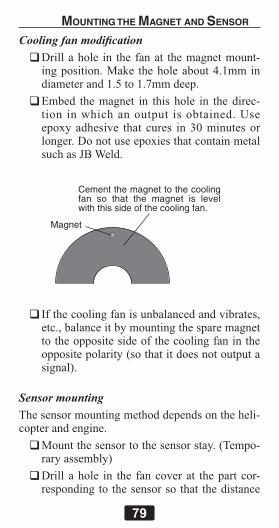
����� ���� �����;#���� �0��%%���(�%�� � � (�� =� ��� (��#�' ��#� �� '������� ��.�>�� (��(�%���D��"� ##�� ����#����� �� �$��� �+##�������7#D��� (��#�' �� � � (��� (�%�� � � (���������� � � �:(��(� � � ��� ��� �D�� �����������F�� ��(������ (�� ����� � � �,�#� ��� ���%� '����0�� ��������F����(���� �� �#��%���(����a6���%��
Magnet
Cement the magnet to the cooling fan so that the magnet is level with this side of the cooling fan.
��=�(�����%� '�=� ���� D�%� ����� ����D����H����H�D�%� �����D��#� � '�(��������#�' ����(����������������=�(�����%� '�=� �� �(������������%���������(��������� ���������' �%��
Sensor mounting<(���� ����#� � '�#�(������� ���� �(��(�%��������� ��� '� ��
�.� �(���� ������(���� ����������<�#������������#D%���0��%%� ��(�%�� � � (�� =� ��������� (������ ��������� �� '���(���� �������(�� (������ ���

MOUNTING THE MAGNET AND SENSOR
80
D�:�� � (�� �� ���� � ��#�' ���� �D��#���� ���J##��<�'(� � (���� ���� ���� �'�(���:�(�(��� '� ��#� � '�M� '����<�#�����������#D%�����%��� (��#� � '�#�(��� ���(�� (�� �� ���� ����� �� ��(�(�� =��#�H� ��� �(��� ����� �=� (��(�%��������<�#������%��#� �(���� ����� ����%���(��#�' ��#� � '������� ��� ��%%� (�� �� ���� �� (�� �� ���������� '�(����������������:��� ��:��(�����<�'(� �(���� ���������'�(���:�(�(��� �'� ���� '�(��� '� ��#� �����:�
Sensor adjustment���?�� (�� �� ���� ������ � �� �D�� � �� �� ���������=���%����-,U�� �(��Z����%�� ��� ���� ��� '[�#� �:�(� � (�� ZGovernor Basic Setting[������ ����%����� �(���#� �%�
1-2mm
MagnetSensor
2.2mm
3.7mm 3.7mm
Center of sensor is offset.
Sensorcase

MOUNTING THE MAGNET AND SENSOR
81
�<(���� ����=�(���� ���������==��� �=��#�(���� ����=� (���� ������������D������=%�:(� �#� � '�(���� ����
� �=� (�� ����%��� ��� %���� (� � -,U�:(� � (��#�' ����������%��D�%�:�(���� ���H�D�� '�(���� ���� �%����� �� (��#�' �� ��� (�� (��-,U����#�����������%������<(��#�' ��� ���� ����'����������� ��������F�#��%�� � ��J##�� �=����� ������� ��� ���D�� ������ �:(� � (���� ���� ��� D��'(� �%���� �� (��#�' �H� (��#�' ��� ���� ������ ��������� ��#���(�����(� '������#�%�������#D%���=�(���� ����D�������%���'(� � '� (�� ����:�� (��:���� �#������%���'(� �������(��>�(���� �������

FUSELAGE SETTING PRECAUTIONS
82
Throttle servo linkage precautions<���==�����%����� (��'���� ��H� �D������ (�� =�%�%�:� '�������� ��:(� � �� ��� '� (�� ������%� >�'��
�.�>�� (�� ������������ '� �� '�� ���:���� ��������D%���.�>�� (�� (��:��=� (�� �� �#����7��� ��<K�� = ��� � � ������ = ��� � ����%������������D%���� ,,U���%��:�(�(��'���� ���� ���&���� ����?��(�� ���%�����(��(��� '� ���#��(%����������#���#� ��=�(���� �#�������>�
� �=�(������������ ���:(��(�(�������� ��=��(��� '� �� ����� ������D%����==��� ���� ���� ������(���� � ��� %�� �#�F��H� (��'���� ���#��� ��������������#�F�##���� ��%�
Fuselage vibration countermeasures�=� (��(�%������� =��#�� ���:��>H� ��� (�� � '� ��#� � ��� ��=��#������ �� � ��%%���������%�H� (����D���� �� ���%���� �� (�� � '� ��:�%%� � ��������7 '� ����D���� ��:�%%� %���� �� ��D%�� ������� ������� � (��'���� ��� =��#�#�F�##����=���#� ����<(���=���H�#�>�� ���� (�� (�� � '� �� �����D���� � =���� � �� (�� (�� ���D����� ��� �=� '����%� ��� ����' �D������ (��'���� ��� �� �� �������� '� �����D%�#���
Use of a tuned silencer<(������=� �� �������� ���� ��%� ����#��������(�� � '� �� (��%�� ����� ��� �� D�� �D�� ��%%����==��� � =��#�(��:�(��� ��#�%�#=M������?��

FUSELAGE SETTING PRECAUTIONS
83
(�� ���%���� �������%� '(�����(��� '� ���������(� '��� ���� �������� �%� �� (�� (��%�� ��� � '���=� (��� '� �� ����������� �� �(� '�� %� ���%�H� (��'���� ���:�%%� �� ���=��#� ����=�����%��:�(� ��#=M�������������(������� ���%%�:�(�����D����� ���D��%� ����

GOVERNOR OPERATION
84
Governor operation<(���)*+$,��������� =��#� ,,,� �� �,,,��#�#�� � ����� �������/�:����H� (�� � '� ��#�� D��� � '� �� (�� ��� �������<(���)*+$,� � �� �==�(��'���� ���:(� �(��� '� ��������� '������%� '�R�)���� ��� ������� E�&������ � (�� ��D�%�I��� (�� � �'� ����������(�����������
Condition of the governor to be on���� ��=����������H� (��'���� ��� ��� � ���� �:(� �(���� ���� ��D�%�:���������!���
�<(��� ;�==� �:��(� �� ���� �� ���� ��� �� �==���� '���:���� ��<(�����>��:��(� ��� � �� ������� �:(� � �� ��������<(��� ;�==��:��(����� �� ������� �:(� �������������� '���������� ��&==��<(��� '� ���������F��������-,�U��=�(������ '��������<(���������� �������:��>� '�������%��
The following operations do not indicate trouble:
When engine speed rises above the set speed:�� ����������%� �����#��� ����� (�� � '� �� ������ ��������D����(�����������Throttle operation speed and ON/OFF point:�=�(��%��������� ��F������-,U��=�(������������ ��(�� ����� ������ ������ �� (�� ��� ��%�H� (��&A;&������ �#��� ���#� ����==���:�(� (�������� '� �������0�%���������� ����#��(� �(���:��(� '�������� �������(���� ������� ��#�� �(��(��&A;&������ �

GOVERNOR OPERATION
85
(����(� '���Deviation from set speed:<(���)*+$,� ��D�%�I��� (�� � '� �� ������ ��:�(� �W U��=�(�����������������F�#�%�H��=�(�����������.���������� $,,��#H�(�����������.��������:�%%���������D��W $��#��/�:����H�(��������� �����D%�#�=��#�(���� ���� ��=��������%����

GOVERNOR SPEED SETTING
86
<(���)*+$,� �������D�� ��� '� (�� �(� �%� � � (��Z� ,�����%�� ��(� �%[�#� �:�(� �(��ZS.BUS Basic Setting[� �� (��'���� ��� ������ ��� '� �(� � �%� �=� ���� ����#���(� ��� '� � � � ���� �� �'���� ��� � ;�==� �:��(H� ������� (�� Z�-��)���� ���� ;�==��:��([�= ��� �:�(� �(��ZGovernor Basic Setting[������ ����%����� �(���#� �%�
Direct set by transmitter on Gov. mixing��(� �'���� ���#�F� '����� �(��< "._�� ��< J�)�����������:��(�(����.��=�(�������(���� �����H� (��(���� �������� �D�� �:��(���:�(����(��� ���� ����(���:��(�
R���� �� ��������� ��=� (��'���� ���#�F� 'H� ��=��� �������� �#���\��#� �%�
Using by 3position switch����(����.������(��:��(������� �� �(��Z�J������%�� � ��� '[�#� �:�(� � (�� ZGov-ernor Basic Setting[� ����� � ���%���� � � (���#� �%�
Speed setting precautions
be set.
maximum speed setting.
-
be achieved with the engine and pitch setup that you are using. Please set the governor maximum

GOVERNOR SPEED SETTING
87
governor to 1750)
speed display. However, this could show some unlocked main rotor condition which is not accu-rate.
Reference<(���� �#����7���= ��� ��� ��%���D���������(� '��(����� � �� ����� ������������ '����������� ��F� ��<(���#� ��=� (����(� '�������������� �%���(����==��� ���D�:�� �(����� � �� ����� � �� ��� ������ � �� (����� � J� ��� ������������F�#�%�H� �=� ��� � � ��� ��� �� �,,��#�� ����� �J� ��� ��� �� $,,��#H� � �� (�� �� �#����7��� ����(� '���=��#�J,��� ,,UH�(����� � �������:�%%��(� '�� =��#� "-,� �� �,,��#��<(�� �� �#����7���= ��� �(�������� %�%���==���� � (����� �J���������� '�
Spe
ed Point 3
Point 2
Point 1
NeutralSpeed settingchannel travel
<(�� ������ �(� '��� %� ���%�� � � �� %� �� �� ��� '���� �� H�JH�� ����

S.BUS BASIC SETTING
88
�� �����6�� �� ��� �%%� C� �(� �%�� �#���D�� %�#�����D������ �� �#���������� �� �� '%��:���H� �� ��� ��������� �� ����' � ���)*+$,� = ��� � ���(� �����GH�7G7�����&G�������(��(� �%���<(���(� �%�����' #� �� ���� ���=��#���:�(� � (�� P��6��Q�6�����#� ��=���= ��� ���� ��'�� '���D�����H�(� ���#��D�� ��� �� P�A/Q�� ����� �F�#�%�H� �=� (���)A�� ��7)A� ��#���'�� � = ��� �� ���� �� '�� '� �� D�����H�(� ����(�#���P�A/Q�� ��(���)*+$,�:�%%�(� � �%%�:���� ��#�>��'�� � ��?�#� ��:�(� �(������������#� �
(1) S.Bus connection setting: start displayUse the mode [+] or [-] keys to navigate through the menu.
Setting ranges common: 1 ~ 16ch, DG1, DG2, INH
Push MODE+/– key
WARNING Always verify that the S.Bus function assign-
ments match your transmitter function assign-ments. If any changes are made within the trans-mitter function assignments, then it will also be necessary to make the changes within the S.Bus function assignments as well.

S.BUS BASIC SETTING
89
(2) S.Bus sett ing: Aileron channel [default: 1ch]Using the data [+] or [-] keys to set the correct channel number.
(3) S.Bus setting: Elevator channel [default: 2ch]Using the data [+] or [-] keys to set the correct channel number.
(4) S.Bus setting: Throttle channel [default: 3ch]Using the data [+] or [-] keys to set the correct channel number.
(5) S.Bus set t ing: Rudder channel [default: 4ch]Using the data [+] or [-] keys to set the correct channel number.
(6) S.Bus setting: Pitch chan-nel [default: 6ch]Using the data [+] or [-] keys to set the correct channel number.
(7) S.Bus setting: AIL gain channel [default: 9ch]Using the data [+] or [-] keys to set the correct channel number.

S.BUS BASIC SETTING
90
(12) S.Bus data resetThis resets the S.Bus channel assignments back to the defaults. Press the data [+] key and [Exec ??] will be displayed as a confirmation. Press data [+] to confirm the reset back to the default settings.
(10) S.Bus setting: RPM chan-nel [default: 7ch]Using the data [+] or [-] keys to set the correct channel number.
<==>��*?������� ���&@�*�� J����channel [default: 8ch]Using the data [+] or [-] keys to set the correct channel number.
(8) S.Bus setting: ELE gain channel [default: 10ch]Using the data [+] or [-] keys to set the correct channel number.
(9) S.Bus setting: RUD gain channel [default: 5ch]Using the data [+] or [-] keys to set the correct channel number.

RUDDER GYRO EXPERT SETTING
91
<(���F����#� ��� �� ����� '��=�����%���%��>�� '�����(�����(���D��%��D������=��#� ���=��#�(����'������<��� ���(���F����#� � ���'�����(��6�����#� H�������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��#� �:�%%��(� '��=��#�(��6����� ��7F����� �<�� �F�� (�� �F����#� �������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��D�����#� �:�%%�D������%�����
(1) Start display
����(��#����PNQ����#����P�Q�>������ ���'���(��#� �
(2) Rudder servo neutral setting
default: 0 uSranges: -140 ~ +140 uS
<(�������#���� ������� ����� (�� ���%������� ��=�(����������������������(������PNQ����P�Q�>�����#�>����?�#� ��
(3) Gyro basic gain
default: 100 %ranges: 50 ~ 120 %
<(��� ����#���� ���� (��D����'�� ��=� (��'������<(����� �D����������?��(��'�� �U��=���������%� �� �#���� '�� ������ ��#��(� (��'�� �� �(���)*+$,�������%��

RUDDER GYRO EXPERT SETTING
92
(4) Rudder exponential
default: -60% (Sports-AVCS), -40% (Sports-Normal), -20% (3D-AVCS), -20% (3D-Normal)ranges: -100% ~ +100%
<(�������#�������� (��=��%��=� (�� ��%� ������� ���%� ��� �� �� ���� �0������� '� (�� #D���:�%%����%� � � �� ��=��� =��%� � �� � ������ '� (�� #D���:�%%� ���%� � � ��#���� �''�������� =��%�� ���?�� ����� ���� ���=��� ���� �<(����0�7b�� = ��� ��:�(� ������� �#������ ��%���D��������#�>��(�����?�#� �
(5) Rudder delay mode
default: Function
��%��� P� ��� Q� =��� �� ��=��� �� ��%� =��%� � ��P�� �� Q�=�����%� ����� ���''��������=��%��(6) Control delay In
default: Sports=12, 3D=15ranges: 0 ~ 20
<(��� ����#���� ���� (����%��� ��� ���#���� (�����>�=��#� ���%��:����%�=������'(���G��'�����%����:�%%����%�� ����#��(���=��%�������(������PNQ����P�Q�>�������?��(����%��

RUDDER GYRO EXPERT SETTING
93
(7) Control delay Out
default: Sports=10, 3D=12ranges: 0 ~ 20
<(�������#��������(����%���:(� �(�����>�������� ���D��>���(�� ���%������� ���G��'�����%������%� � ����#��(���=��%�� �����(������PNQ����P�Q�>�������?��(����%��
(8) Stop delay
default: 120%ranges: 100% ~ 400%
<(��� ����#���� ��� ���� �� ��?�� (�� �''�������� �����=�(��������G��'�����%���:�%%���%���(����%���������%� '�� �%����D� ���������(������PNQ����P�Q�>�������?��(����%��
(9) Gyro working mode
default: CMT
<(�������#��������(��'���������� '�#������<(���(�����������.<H�A��#�%�� ���K�����<(���.<�= ��� ��������:(� ���� �������:��(�D�:�� �(��A��#�%� � ���K���#�����D������ � (��'�� ���%�������(������PNQ����P�Q�>�������%���(��������� '�#����

RUDDER GYRO EXPERT SETTING
94
(10) Pirouette speed
default: 450 deg/sec (Sports), 720 deg/sec (3D)ranges: 100 ~ 999 deg/sec
<(�����?���(����������������=�(���������<(����=�%� ��%��� ���� ��� "$,���';����� �����#����� ��+J,���';����� ��0�#����:(� ���������� ,,�U��<(��D��#��=� (�� %� �� �(�:�� (�� ���%� ���������������=�(�������������(������PNQ����P�Q�>�������?��(����%��
(11) Gain change up delay
default: 12ranges: 1 ~ 50
<(��� ���� (����%����=� (��'����'�� � =��#� %�:� ��(�'(��<(����%��������� ��=��#���%������(������ '�� � ������ '� (��� ��%��#��� ���� ��%� ( � '��=�������>� '��%���������(������PNQ����P�Q�>�������?��(����%��
(12) Gain change down delay
default: 3ranges: 1 ~ 50
<(������� (����%����=�(��'����'�� �=��#�(�'(���%�:��<(����%�� ������� �� =��#�(����� '� �� ��%�����0������� '�(�����%��#���������%�( � '��=��� ��� �>� '��%���� �� (����� '� �� ��%�� ������� (������PNQ����P�Q�>�������?��(����%��

RUDDER GYRO EXPERT SETTING
95
(13) Rudder histeresis
default: 7 uSranges: 0 ~ 50 uS
<(�����?���(�����������>� %%��� '��������(������PNQ����P�Q�>�������?��(����%��
(14) Gain tracking
default: 0 %ranges: -20% ~ +20%
<(��� ��?��� (��'����(�%�� '� =��%� '���� '� %�=�� ����'(�������������(������PNQ����P�Q�>�������?��(����%��
(15) F/F mixing
default: off
<(��� ��%���� (���;�� ���������:�����#�F� '� �������� �� (�%��� (��'����������� �D�� ���� '����(���������#�F� '�D�=����(��'������ ��� ���#����#� �� ���#�������(��'�������=��#� ����;��#�F� '����(� �%���:�(� �(���)*+$,��0�� ����#�� �� ��� ����%�� ���� ����%����� �#�F� '�:�(� ������� �#�������(���:�%%����%%����?��(��� ����' �%���(��'����

RUDDER GYRO EXPERT SETTING
96
(16) F/F mixing rate
default: 0 %range: -100% ~ +100%
<(�������#������?���(���;��#�F� '������<(��PGQ�%�:�� ��P/Q�(�'(������������?��D%��� ������%%����G��'��� ��%���:�%%� ����#����#�F� '� ��� (�� ��%�%���������#������:���=��#��� ����:�����N���������(�
(17) F/F mixing acceleration gain
default: 0 %range: 0 ~ 200 %
�=� (�� ��%%������ ���>� ���#�����L��>%�H� (� �(�� ����%����� �'�� � ��� ���� �� � ������� (���;��#�F� '� ���� �� (�%�� ��#�� ���� =��� (��� ���� ��(� '��������(������PNQ�� ��P�Q�>�����#�>�����?�#� �������(������PNQ����P�Q�>�������?��(����%��
(18) Sensor mode
default: Moderate
<(��� ����#���� ��%���� (�� ����� ��� �=� (��'���� �� ���� ��' �%�� <(�� ����� ��� ��� ��� ���.������X.���%�Xc��>H� D� (�� ��D�%��� ���������������.���(�%�������:�%%����=��#�(��D���:(� ��� '� (��.������� ��� '���#�%%��� (�%��������#������=��#�D����� �(��c��>����.���%����� '������ (������ PNQ� ��� P�Q� >��� �� ��?�� (��

RUDDER GYRO EXPERT SETTING
97
��%��
(19) Neutral compensation
default: ON
<(���= ��� �:��>��������%%� (�� ���%���� ��=�(�� ������ ������ =��� �#����� '� ��%� ����#��� ��<����� (��� = ��� � �==�����%�H� (����� (��(�%�������� =��� �D�� � �� ���� �H� � ��#�#���I�� (�� ���%���� �� �=��� '����0�(�%������H� (��� = ���� �#��� ��:��>� ���:�%%� ��� �� (��L��>� � ���''��������#���#� ����(��>�(��= ��� ��������=���:��>��������%�������(������PNQ����P�Q�>������ �D%��� ������D%��(������� �
(20) Yaw smoother
default: ON
��%����(���������� ��%�=��%� '���(� �& H���������� ��%�D���#���#�����F�����(� �&==H� ������� �� ��%� ����� ��� � �����������%��� (�� �������� ��%�=��%� '����������������(������PNQ����P�Q�>������ �D%���������D%��(���= ��� �
(21) Stop boosting
default: Offrange: Off ~ 200%
<(���= ��� �:��>��=���D���� '�(��'����'�� ����#������ ��%� ����#��� ������ (������ PNQ���� P�Q�

RUDDER GYRO EXPERT SETTING
98
>�������?��(����%��
(22) Gyro data reset
<(����������%%��=�(��������'��������#�����D��>���(����=�%���%�����������(������PNQ�>���� ���� �� P7F��� ddQ� ��� �(�: ���� �� �� !�#��� ��������(������ PNQ� >��� �'�� � �� �� =��#� (��������� �� ���%%��=�(��'��������#�����:�%%�D�������
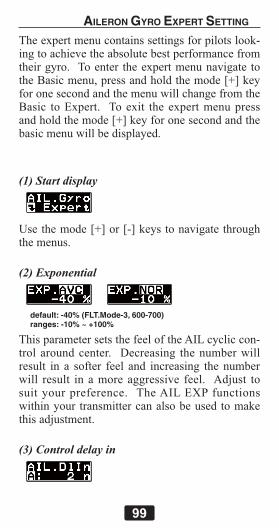
AILERON GYRO EXPERT SETTING
99
<(���F����#� ��� �� ����� '��=�����%���%��>�� '�����(�����(���D��%��D������=��#� ���=��#�(����'����� �<��� ��� (���F����#� � ���'��� ��(��6�����#� H�������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��#� �:�%%��(� '��=��#�(��6����� ��7F����� �<�� �F�� (�� �F����#� �������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��D�����#� �:�%%�D������%�����
(1) Start display
����(��#����PNQ����P�Q�>������ ���'���(��'(�(��#� ��
(2) Exponential
default: -40% (FLT.Mode-3, 600-700)ranges: -10% ~ +100%
<(�������#��������(��=��%��=�(����G����%����� ���%� ��� �� �� ���� �0������� '� (�� #D���:�%%����%� � � �� ��=��� =��%� � �� � ������ '� (�� #D���:�%%� ���%� � � ��#���� �''�������� =��%�� ���?�� ����� ���� ���=��� ���� �<(����G�7b�� = ��� ��:�(� ������� �#������ ��%���D��������#�>��(�����?�#� �
(3) Control delay in

AILERON GYRO EXPERT SETTING
100
default: 7 (FLT.Mode-3, 600-700) ranges: 0 ~ 20
<(��� ����#���� ���� (����%��� ��� ���#���� (�����>�=��#� ���%��:����%�=������'(���G��'�����%����:�%%����%�� ����#��(���=��%�������(������PNQ����P�Q�>�������?��(����%��
(4) Control delay out
default: 7 (FLT.Mode-3, 600-700)ranges: 0 ~ 20
<(�������#��������(����%���:(� �(�����>�������� ���D��>���(�� ���%������� ���G��'�����%������%� � ����#��(���=��%�� �����(������PNQ����P�Q�>�������?��(����%��
(5) Stop delay
default: 120%ranges: 100% ~ 400%
<(��� ����#���� ��� ���� �� ��?�� (�� �''�������� ���� �=� (�� ������ �G��'��� ��%���:�%%� ��%��� (���������%� '�� �%����D� ���������(������PNQ����P�Q�>�������?��(����%��
<K>���������!� �
default: 98% (FLT.Mode-3, 600-700)ranges: 0 ~ 150%
<(�������#���������(���K�����#�� '�=������� ������� '�(����%�H�(��(�%�� '���:������� �������H�

AILERON GYRO EXPERT SETTING
101
D�(���� ��%�=��%� '�#���D��� M� ����
(7) Control feeling
default: 5nranges: 1 ~ 10n
<(�������#��������(���� ��%�=��%� '��=�(����%���� ��� ��%��� ������ '�(����%�H�(���� ��%�=��%�� '�:�%%� D�� �� ���� ��0������� '� (����%�H� (���� ��%�=��%� '�:�%%�D���� �#���
(8) Rate Constant
default: 50% (FLT.Mode-3, 600-700)ranges: 0 ~ 150%
<(�������#������%���� (���� ���� ����=� (����%%��������?�� (�� ��%%� ���� D�:�� � ���� �����������'(�M�'(���==��� �����
(9) Roll rate setting
default: 100%ranges: 50 ~ 150%
<(�������#�������?���(����%%�������D��(����%���� ��� ��%�����(����%�����#��(�(����%%������=�(��(�%�������
(10) D gain setting

AILERON GYRO EXPERT SETTING
102
default: 200% (HeliSize=600-700)ranges: 0 ~ 250%
<(��� ����#���� ��?��� (��0�'�� � ���==��� ��%�'�� �� �=� (�� ��%��� �'����� �� �(� '��� (�� �(������������� �=� (�� �� ��%� =��%� '� � �� ����#��� ����%���(�����=��������%��
(11) Sensor mode
default: Middle
<(��� ��%���� (�� ����� ��� �=� (�� '���� �� ��� �� � � ' � % �� <(�� � � ��� ��� � �� � � � � � ��� D��.������X.���%�Xc��>H� D� (�� ��D�%��� �����������������%���(��'����#��(� '�=���(��(�%�����(� '����N����^�>��H�(��#��������(� '���
(12) Data reset
<(����������%%��=�(����%��� �'��������#�����D��>���(����=�%���%�����������(������PNQ�>���� ���� �� P7F��� ddQ� ��� �(�: ���� �� �� !�#��� ��������(������ PNQ� >��� �'�� � �� �� =��#� (��������� �� ���%%��=�(��'��������#�����:�%%�D�������

ELEVATOR GYRO EXPERT SETTING
103
<(���F����#� ��� �� ����� '��=�����%���%��>�� '�����(�����(���D��%��D������=��#� ���=��#�(����'����� �<��� ��� (���F����#� � ���'��� ��(��6�����#� H�������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��#� �:�%%��(� '��=��#�(��6����� ��7F����� �<�� �F�� (�� �F����#� �������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��D�����#� �:�%%�D������%�����
(1) Start display
����(��#����PNQ����#����P�Q�>������ ���'���(��#� �
(2) Exponential
default: -40% (FLT.Mode-3, 600-700)ranges: -100% ~ +100%
<(��� ����#���� ���� (�� =��%� �=� (��7G7����%����� ��%� ��� �� �� ���� �0������� '� (�� #D���:�%%����%�� �����=���=��%�� ��� ������ '�(�� #�D��� ��%%� ���%� � � ��#���� �''�������� =��%�� ���?��������������=��� ���� �<(��7G7�7b��= ��� ��:�(� ����� �� �#������ ��%���D��������#�>��(�����?�#� �
(3) Control delay in
default: 10 (FLT.Mode-3, 600-700)ranges: 0 ~ 20

ELEVATOR GYRO EXPERT SETTING
104
<(��� ����#���� ���� (����%��� ��� ���#���� (�����>� =��#� ���%� �:����=��:����� ���=����%�����G��'�����%���:�%%����%�� ����#��(���=��%�������(������PNQ����P�Q�>�������?��(����%��
(4) Control delay out
default: 10 (FLT.Mode-3, 600-700)ranges: 0 ~ 20
<(�������#��������(����%���:(� �(�����>�������� ���D��>���(�� ���%������� ���G��'�����%������%� � ����#��(���=��%�� �����(������PNQ����P�Q�>�������?��(����%��
(5) Stop delay
default: 120%ranges: 100% ~ 400%
<(��� ����#���� ��� ���� �� ��?�� (�� �''�������� �����=�(��������G��'�����%���:�%%���%���(���������%� '� � � %���� D� ���� ����� (������ PNQ� ��� P�Q�>�������?��(����%��
<K>���������!� �
default: 98 % (FLT.Mode-3, 600-700)ranges: 0 ~ 150 %
<(��� ���� (���K�����#�� '� =������ � ������ '�(����%�H�(��(�%�� '���:������� �������H�D�(���� ��%�=��%� '�#���D��� M� ����

ELEVATOR GYRO EXPERT SETTING
105
(7) Control feeling
default: 5 nranges: 1 ~ 10n
<(�������#���� ���� (�� �� ��%� =��%� '��=� (�� �%������� �� ��%�� � ������ '� (����%�H� (�� �� ��%�=��%� '�:�%%� D�� �� ���� ��0������� '� (����%�H�(���� ��%�=��%� '�:�%%�D���� �#���
(8) Rate Constant
default: 50 % (FLT.Mode-3, 600-700)ranges: 0 150%
<(��� ����#���� ��%���� (�� �� ���� ����=� (���%�������������?��(���%����������D�:�� ������ �����������'(�M�'(���==��� �����
(9) Roll rate setting
default: 100 %ranges: 50 ~ 150 %
<(�������#������?��� (�����(�������D�� (���%��������� ��%�����(����%�����#��(�(����%%������=�(��(�%�������
(10) D gain setting
default: 200% (HeliSize=600-700)ranges: 0~250%
<(��� ����#���� ��?��� (��0�'�� � ���==��� ��%�
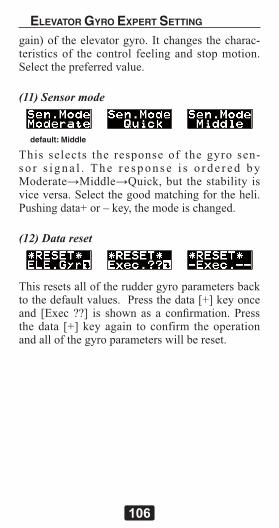
ELEVATOR GYRO EXPERT SETTING
106
'�� ���=� (���%������'��������(� '��� (���(������������� �=� (�� �� ��%� =��%� '� � �� ����#��� ����%���(�����=��������%��
(11) Sensor mode
default: Middle
<(��� ��%���� (�� ����� ��� �=� (�� '���� �� ��� �� � � ' � % �� <(�� � � ��� ��� � �� � � � � � ��� D��.������X.���%�Xc��>H� D� (�� ��D�%��� �����������������%���(��'����#��(� '�=���(��(�%�����(� '����N����^�>��H�(��#��������(� '���
(12) Data reset
<(����������%%��=�(��������'��������#�����D��>���(����=�%���%�����������(������PNQ�>���� ���� �� P7F��� ddQ� ��� �(�: ���� �� �� !�#��� ��������(������ PNQ� >��� �'�� � �� �� =��#� (��������� �� ���%%��=�(��'��������#�����:�%%�D�������

SWASH EXPERT SETTING
107
<(���F����#� ��� �� ����� '��=�����%���%��>�� '�����(�����(���D��%��D������=��#� ���=��#�(����'����� �<��� ��� (���F����#� � ���'��� ��(��6�����#� H�������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��#� �:�%%��(� '��=��#�(��6����� ��7F����� �<�� �F�� (�� �F����#� �������� ��(�%��(��#����PNQ�>���=���� ������ ��� ��(��D�����#� �:�%%�D������%�����
(1) Start display
����(������PNQ�� ��P�Q�>������ ���'���(��'(�(��#� �
<Q>�V��X��Z���+� ����
default: 100%ranges: 30~150%
<(�����?��� (�����(�����%��� �#�F� '������<(�����(���� ����: �������� �D�(�D����?����� �������%%��
<�>�V��X\Z\���+� ����
default: 100%ranges: 30~150%
<(�����?���(�����(����%������#�F� '������<(�����(���� ����: �������� �D�(�D����?����� �������%%��

SWASH EXPERT SETTING
108
<^>�V��X\Z\Q���+� ����
default; 100%ranges: 30~150%
<(�����?���(�����(���J ���%������#�F� '������<(�����(���� ����: �������� �D�(�D����?����� ������%%��� �� ��� � %�� ����%�D%�� ��/"� �:��(�#����
<_>���ZXV�����+� ����
default; 100%ranges: 30~150%
<(�����?��� (����%��� ������(�#�F� '������<(������ �� �D�� ��?���� =��� %�=� � �� ��'(� ������� ��� ������%%��
<K>���ZX\Z\���+� ����
default; 100%ranges: 30~150%
<(��� ��?��� (�� ��%��� � �� �%������#�F� '� �����<(�� ������ �D����?���� =��� %�=� � �� ��'(��������� �� � ������%%��� �� ��� � %�� ����%�D%�� =���/"�"$��:��(�#����
<`>���ZX\Z\Q���+� ����
default; 100%ranges: 30~150%
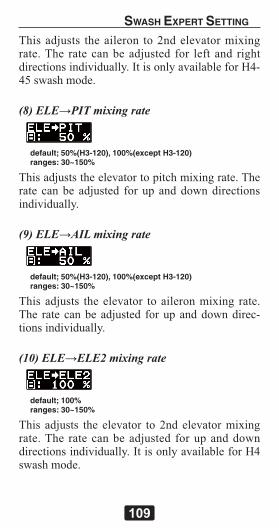
SWASH EXPERT SETTING
109
<(��� ��?��� (�� ��%��� � �� J �� �%������#�F� '������<(�� ���� �� �D�� ��?���� =��� %�=� � �� ��'(�������� ��� ������%%��������� %������%�D%��=���/"�"$��:��(�#����
<q>�\Z\XV�����+� ����
default; 50%(H3-120), 100%(except H3-120)ranges: 30~150%
<(�����?���(���%�����������(�#�F� '������<(������ �� �D�� ��?���� =��� �� � ����: �������� ��� ������%%��
<z>�\Z\X��Z���+� ����
default; 50%(H3-120), 100%(except H3-120)ranges: 30~150%
<(��� ��?��� (�� �%������ �� ��%��� �#�F� '� �����<(�� ������ �D����?���� =������ ����: ��������� ��� ������%%��
<={>�\Z\X\Z\Q���+� ����
default; 100%ranges: 30~150%
<(��� ��?��� (�� �%������ �� J �� �%������#�F� '������<(�� ���� �� �D�� ��?���� =��� �� � ����: �������� ��� ������%%��������� %������%�D%��=���/"��:��(�#����

SWASH EXPERT SETTING
110
(11) Linkage compensation aileron
default; 0%ranges: 0~100%
<(�����?���(��%� >�'����#�� ���� ��=�(����%���� ��� ��%�� M� ���������(�� ���%�������������� ��<(��������"���� � ��� '�H� %�=� � �� ��'(�� ����(�(�'(�� ��%�:�
(12) Compensation direction of the aileron
default; plus
<(�����%����(��������� ��=�(����%��� ���#�� ����� ��<(��������� �����(� '���D����(� '�(��0���N���� ^� >������� (��������� ��=� � ������ � ��D���#�%%���
(13) Linkage compensation elevator
default; 0%ranges: 0~100%
<(��� ��?��� (�� %� >�'�� ��#�� ���� ��=� (���%������ �� ��%� � =%� ���� �� ���(� � �� ��%��� �������� ��<(��������"���� ���� '�H���� ����: �� ����(�(�'(�� ��%�:�
(14) Compensation direction of the elevator
default; plus

SWASH EXPERT SETTING
111
<(�����%����(��������� ��=�(���%��������#�� ����� ��<(��������� � ��� �(� '���D����(� '� (��0���N����^�>�������(��������� ��=�� ������ ���D���#�%%���
(15) Speed compensation
default; 50%(H3-120), 0%(except H3-120)ranges: 0~100%
<(�������#������?���(���������=�(�����(�� ����%��� � ������� �� (�� �%������ ������� ����?��#� ����(����� ������ ��(�%��D��#� �#�%�
(16) Swash rotation
default; 0 degranges: -90~+90 deg
<(�������#���������������?��(���� ��%��(���� '�������(������PNQ����P�Q�>������#�>����?��#� ��
(17) Pitch zero setting
default: 1520 uS
<(��� ����#���� � ���� (�� ���(� I���� ��� � �=��)*+$,��.���� (�����(����>� �� (��I�������(����(����N���� ^� >����<(�� I�������(� ��' �%� ���#�#���I��� ���)*+$,��<(������%��� �(�:�� Ze[�#��>�����(����� '���� �

SWASH EXPERT SETTING
112
(18) Pitch low setting
default: 1940 uS
<(��� ����#���� ���� (��#� �##����(���� � �=��)*+$,��.����(�����(����>���#� �##����(����(����N���� ^� >����<(��#� �##����(� ��' �%����#�#���I������)*+$,��<(������%����(�:��Ze[�#��>�����(����� '���� �
(19) Pitch high setting
default: 1100 uS
<(�������#���� ����� (��#�F�##����(���� ��=��)*+$,��.����(�����(����>���#�F�##����(����(����N���� ^� >����<(��#�F�##����(� ��' �%����#�#���I������)*+$,��<(������%����(�:��Ze[�#��>�����(����� '���� �
(20) Data reset
<(����������%%��=�(���:��(��%�������#�����D��>���(����=�%���%�����������(������PNQ�>���� ���� �� P7F��� ddQ� ��� �(�: ���� �� �� !�#��� ��������(������ PNQ� >��� �'�� � �� �� =��#� (��������� �� ���%%��=�(��'��������#�����:�%%�D��������

GOVERNOR EXPERT SETTING
113
<(��� ���� (������%���=� (��'���� ��� = ��� � =���(�� �F����#���%������(� (��#����N���� ^� >���=���#����(� �� ������ ��� �(��)���� ���6�����#� �����%��H� �� '�� � �� (��)���� ���7F����#� ����(�#����N���� ^� >��� =���#���� (� �� ������ ���'�� �� �(��)���� ���7F����#� ���D����� �����(��)���� ���6�����#� �
(1) Start display
��(�#����N����^�>��H�������%%�(��'(�(������� '�#� ����(� '�#����N����^�>���=���#����(� �� �� ���� �H� D�� '�����D��>� �� '���� ��� D�����#� �
(2) Governor working mode
default: Governor
<(�����%����(��'���� ���:��>� '�#���������(���'���� ����������%�� �%�#��#�����<(��)���� ���#����:��>�����(��� '� ������%�� ���������� ��� � ����%�� ��<(�� ����%�� � %�#�� ������G#��#����� %��:��>��:(� �(��� '� ������%�� ��F�������(����� '�����%�� �� ��� '� ������%�� ���� ��D�� %�:������(� '����N����^�>��� (��#��������(� '�����(� � (������G#�#���� ��� ��%����H�(��#� �(6) Throttle data mode �(�%��D�������<F������#����

GOVERNOR EXPERT SETTING
114
(3) Revolution display mode
default: Rotor
<(�����%����(������%�� �����%���#����=�����(���(��#�� ���������� '� ������%�� ����(� '����N����^�>��H�(��#��������(� '���
(4) Operation response
default: Middle
<(��� ��%���� (��'���� ��� ������� � ����� ������%���(��D���#��(�=�������� '� ���������(�� '����N����^�>��H�(��#��������(� '��������#�#� ���� ��%���� � ���H�.���%��]�'%�:�� '� �H�.�������]�'���%� �� � '� �H�c��>� �]6��(%����#�����
(5) Governor gain
default: Moderate=30%,Middle=40%,Quick=60%ranges: 10~100%
<(��� ���� (��'���� ���:��>� '�'�� ���(� � (��������� ������ ��� ����(� '��H� (��'���� ���'�� ������#����%%���(� '��������=�%��<(��D���'�� ����(���#� ���'(�D�=����(������%�� �:�''� '��>����%�������(� '����N����^�>��H� (����%�� ����(� '���

GOVERNOR EXPERT SETTING
115
(6) Throttle data mode
default: Optimize
<(��� ��%���� (�� (��%�� � �� ������� ����(� '����N����^�>��H�(��#��������(� '��
Optimize:�)*+$,� ���� (�� (��%�� � �� ��' �%� �� ���##��A�� ���� ���� ������ (�� (��%���������� '�� � (���� �#����Fixed:<(��!F���(��%��� ������%�I�����%������(�������%�� �����������##� ����=����%������#�����Tx.Curve:�)*+$,�����(���F���(��%��� ��=��#�(���� ��#�����<(�� (��%�� ����� ��� '�� � (�� �� �#���������L�������(� �(������G#�#���������%����H�(���#�����(�%��D����%�����
(7) Revolution change up delay
default: 8range: 2 ~ 20
<(��� ���� (����%����=� (�� ����%�� � =��#� %�:��� (�'(�� ��(� '� ���N� ��� ^� >��H� (�� ��%�� ����(� '���
(8) Revolution down delay
default: 10range: 2 ~ 20

GOVERNOR EXPERT SETTING
116
<(�������(����%����=�(������%�� �=��#�(�'(���%�:����(� '����N����^�>��H�(����%������(� '���
(9) Start delay
default: 5range: 2 ~ 20
<(��� ���� (�� ��%��� ��� '� (�� ���� '� �=� (��'���� ������(� '����N���� ^� >��H� (����%�� ����(� '���
(10) Low limit at hovering
default: 25 %range: 0 ~ 80 %
<(��� ���� (�� (��%�� %�:� %�#�� ��� '�(����� '�����%�� ������������%�� ������D��������(� '����N����^�>��H�(����%������(� '���
(11) Low limit at idle up
default: 45 %ranges: 10 ~ 80 %
<(��� ���� (�� (��%�� %�:� %�#�� ��� '� ��%�� ������%�� ������������%�� ������D��������(� '����N����^�>��H�(����%������(� '���
(12) Battery F/S voltage setting

GOVERNOR EXPERT SETTING
117
default: 3.8 vranges: 3.5 ~ 7.5 v
<(��� ���� (��D����� =��%� ��=�� � �� %�:�D������%��#���%�'������ (�����������%�'��D�� (��D�����������<(��D������(������������������==��� �D����==��� �#� =�������%�����#�>�� ���� (��D������������� ��� ��#�� ��� =��� �M�'(� �#�� �$�� ,�#� ���� �=��� ���� '� (��D����� �%��#��<(����%�� ��� �(� '���D����(� '�0�<�N���� ^� >�����''�������� '���%�'����������=�%%�:��
(13) Governor data reset
<(���������(��'���� �������#��������=�%����� '��<(��Z7F���dd[� �������%�����D����(� '�����N���� ^� >��� =��� �� =��#��� ����(� '����N�����>��� �'�� � ��#�%���� (�� ����� �������H� ����%����Z�7F����[�� ����� ����(����������%������(� '�#���N����^�>������ '��� !�#��� �����%��H� (�������������������D�����

SWASH SETTING PARAMETER TABLE
118
<(�� �D%�� �(�:�� (�������� ����#����� D�� ���(�(�%�� ��I�� � �� =%�'(�#���� ��#D� ��� ����=��� ��(��� ����� ��:�(� �(��ZSwash Basic Setting[������ ��=�(��#� �%�
450-550P��%��� �'���Q
Flight Mode
1 2 3 4 5
AVCS.Dmp 96% 97% 98% 98% 100%
Cnt.DlyIn 15 12 7 4 2
Cnt.Dlyout 15 12 7 4 2
EXP. -60% -50% -40% -30% -20%
Rate.Cst 20% 20% 20% 10% 0%
D.Gain 100% 100% 100% 100% 100%
ANG. Base 360d/s 420d/s 420d/s 480d/s 480d/s
P7%������'���Q
Flight Mode
1 2 3 4 5
AVCS.Dmp 97% 98% 98% 99% 100%
Cnt.DlyIn 15 12 10 8 5
Cnt.Dlyout 15 12 10 8 5
EXP. -60% -50% -40% -30% -20%
Rate.Cst 20% 20% 20% 10% 0%
D.Gain 100% 100% 100% 100% 100%
ANG. Base 240d/s 300d/s 300d/s 360d/s 360d/s

SWASH SETTING PARAMETER TABLE
119
600-700P��%��� �'���Q
Flight Mode
1 2 3 4 5
AVCS.Dmp 96% 97% 98% 98% 100%
Cnt.DlyIn 15 12 7 4 2
Cnt.Dlyout 15 12 7 4 2
EXP. -60% -50% -40% -30% -20%
Rate.Cst 30% 40% 50% 40% 30%
D.Gain 200% 200% 200% 200% 200%
ANG. Base 240d/s 270d/s 300d/s 300d/s 300d/s
P7%������'���QFlight Mode
1 2 3 4 5
AVCS.Dmp 97% 98% 98% 99% 100%
Cnt.DlyIn 15 12 10 8 5
Cnt.Dlyout 15 12 10 8 5
EXP. -60% -50% -40% -30% -20%
Rate.Cst 30% 40% 50% 40% 30%
D.Gain 200% 200% 200% 200% 200%
ANG. Base 180d/s 210d/s 240d/s 270d/s 270d/s

SWASH SETTING PARAMETER TABLE
120
750-MoreP��%��� �'���Q
Flight Mode
1 2 3 4 5
AVCS.Dmp 96% 97% 98% 98% 100%
Cnt.DlyIn 15 12 10 8 5
Cnt.Dlyout 15 12 10 8 5
EXP. -60% -50% -40% -30% -20%
Rate.Cst 30% 40% 80% 70% 60%
D.Gain 200% 200% 200% 200% 200%
ANG. Base 210d/s 240d/s 270d/s 270d/s 270d/s
P7%������'���QFlight Mode
1 2 3 4 5
AVCS.Dmp 97% 98% 98% 99% 100%
Cnt.DlyIn 15 12 10 8 5
Cnt.Dlyout 15 12 10 8 5
EXP. -60% -50% -40% -30% -20%
Rate.Cst 30% 40% 60% 70% 60%
D.Gain 200% 200% 200% 200% 200%
ANG. Base 150d/s 180d/s 210d/s 240d/s 240d/s

LINKAGE COMPENSATION
121
<(����F�%�� ��(�:������(��%� >�'����#�� ���� ��F�#�%��=���(��/�� J,��:��(�#����R�<(�� ��%��� H� �%������ � �����(�#���#� � �(�%��D�������#�F�##�(��'(�D��(���� �#����� ����� ���
*���� ���'����� � �,���� �������'� ��������� ��� ����)� ����� ��������<(��� ������ (�����(�������� � �� '��� �� (���)*+$,��.����(�����(����>����� ���������� �����(�I������� ���&�� �(�����_����� �(������/���7F����#� H�� ����(�(�����D� ��<(�����(�I������� ����#�#���I�����(���)*+$,���.���� (�����(� ���>� ��#� �##������� ��&�� �(�����G�:�#� H�� ����(�(�����D�� ��<(��#� �##����(������� � ���#�#����I����.���� (�����(� ���>� ��#�F�##������� ��&�� � (�����/�'(�#� H� � ����(� (�� ���D� ��<(��#�F�##����(������� ����#�#����I���
*����)��) �����'����� �.�>�� ���� (�� �:��(��%��� ��� =%��:(� � (�����(� ���>� ��� �� ��� ������ � �� =�������?��(�� %� '(��=� (�� %� >�'�� ����� ��� (�� (���:��(��%��������D��M���
� .���� (�����(� ���>� ��#�F�##������� �� ��#�>�������=�(���:��(��%������M��D�����?�� '�(����<X��GH���<X7G7�#�F� '������ � (������/���7F����#� ��.���� (�����(� ���>� ��#� �##������� ��.�>�� (����#����?�#� ����#�F�##����>������� �

LINKAGE COMPENSATION
122
����� �)��) �����'����� �.����(�����(����>����� ��������� ��.����(����%��� � ���>� ��'(� � �� %�=��.�>�� ���� �=�(��� ������ ������(�����%������������� ��
� ��?�� (����GX��<�#�F� '� ���� � � (�����/���7F����#� � ��D��#� �#�I��� (��� ������ �� �� �(�%��D�� ��?����D�(� %�=�� ����'(�������� ��.���� (�����(� ���>� ��#�F�##������� ��&�� � (�� �������G� � � (�� ����/���7F����#� ��.���� (�� ��%��� � ���>� %�=�� �� ��'(����?�� (���������G� ���� � � (������/���7F����#� ���D��#� �#�I���(��� ������ ���(���%������������(�������� ��
� � � ������=� (�� � ������ � ��� � ��������:(� �� ������� (���������G� ���H� ��#���D����������� (�� ��#�� ���� �������� H� ��� � (������0���#� �� �����(��������� ���#� ���6�(�%�=�� ����'(���%��� ��(�%��D����?�����.���� (�����(� ���>� ��#� �##������� ����?���������G� ���� ��#��:��� ��� ���(�#�F�##������� �
��������)��) �����'����� �.����(�����(����>����� ��������� ��.����(�� �%������ ���>��� � ����: ��.�>�� ����(�� (�� � ������ � ��� �� (�����(���� ��%��� �������� ��
� ��?�� (��7G7X��<H�7G7X��G�#�F� '����� � � (�����/���7F����#� � �� D��#� �#�I���(��� ������ ��
� ���(�%��D����?����D�(���� ����: �������

LINKAGE COMPENSATION
123
�� ��.���� (�����(� ���>� ��#�F�##������� ��&�� � (�� �����7G7� � � (�� ����/���7F����#� ��.���� (�� �%������ ���>���� ����: ����?��(�������7G7������ �(������/���7F����#� ���D��#� �#�I���(��� ������ ���(����%��� �������(�������� ��
� � � ������=� (�� � ������ � ��� � ��������:(� �� ������� (�������7G7� ���H� ��#���D����������� (�� ��#�� ���� �������� H� ��� � (����7�0���#� �� �����(��������� ���#� ����6�(��� � ����: ��%������ �(�%��D�� ���?�����.���� (�����(� ���>� ��#� �##������� ����?�������7G7�������#��:���������(�#�F�##������� ��&�� � (��������#��� � (������/���7F�����#� ��.���� (�� �%������ ���>��� � ����: �L��>%�����?�� (��������#�� ���� ��D��#� �#�I��� (�� � ������ � �� (�����(��������� �
��<�6���&��&��<�&A�(� �E�NC �"+$��J�-BCJH������#�%�E�NC �"+$��J�-BC�
,C,�*�D�>�H��(�����#��H��(�����' H��(�D��JBB�"�B$H�a��� ����������
