case study: lunar roving vehicle - university of...
TRANSCRIPT

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Case Study: Lunar Roving Vehicle
1
© 2014 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Concepts for Lunar Equipment Carriers
2

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Concepts for Lunar Equipment Carriers
3

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Concepts for Lunar Equipment Carriers
4
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
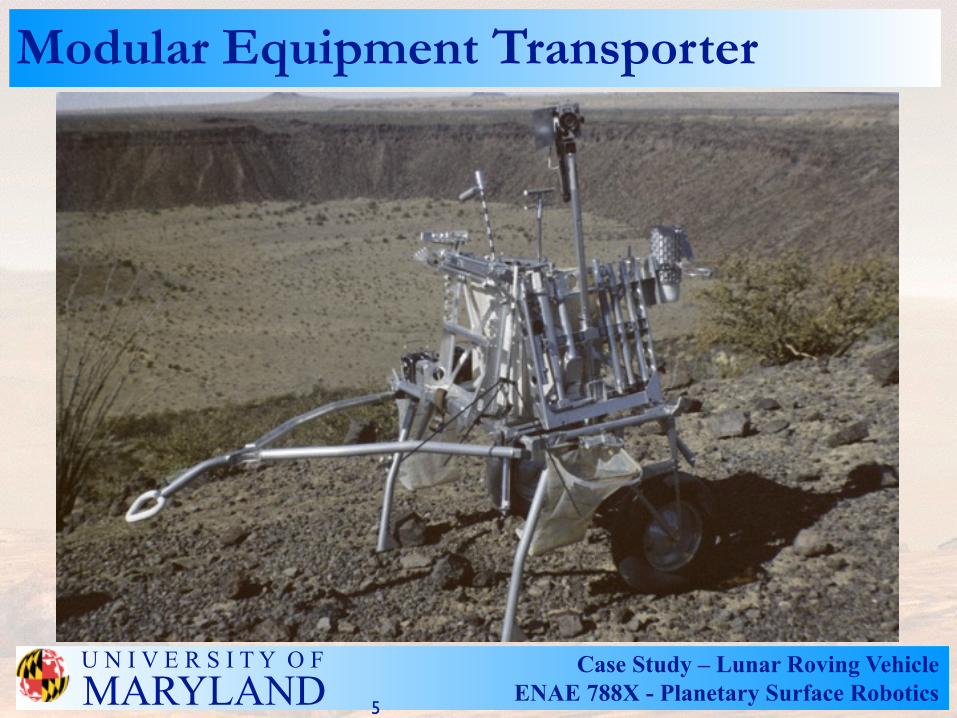
Modular Equipment Transporter
5

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
MET Structure
6

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
MET Equipment Load (Apollo 14)
7

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Pneumatic Tire Specifications
8

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Thermal Vacuum Testing of Wheels
9
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
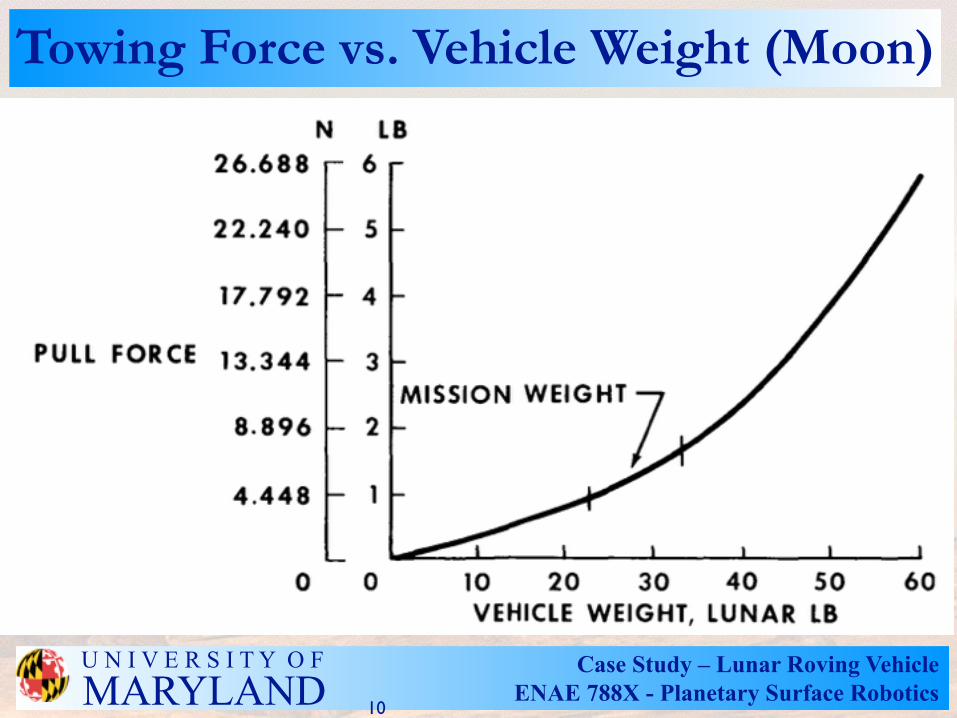
Towing Force vs. Vehicle Weight (Moon)
10

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Designing the Lunar Rover
Excerpts from “Lunar Rover” from A&E series “Moon Machines” (available on YouTube at https://www.youtube.com/watch?v=5aDSYTMqyQw )
11

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Three-View and Dimensions
12

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Payload Components
13
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
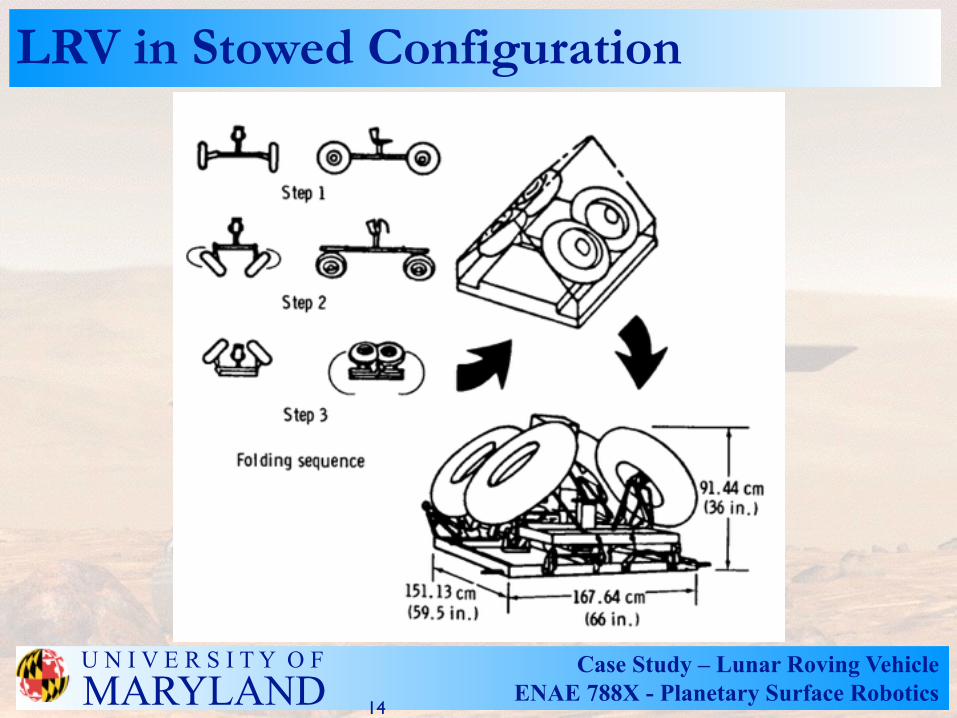
LRV in Stowed Configuration
14

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Deployment (1-6)
15

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Deployment Sequence (7-12)
16

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Deployment Sequence (13-15)
17
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
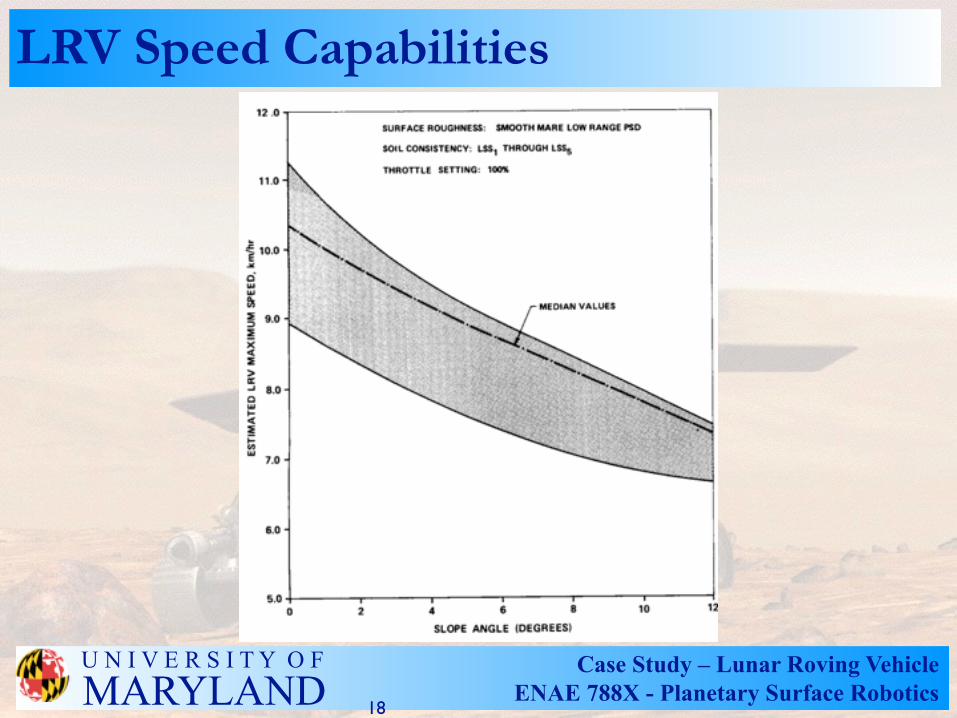
LRV Speed Capabilities
18

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Chassis Structure
19

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Wheel Suspension
20

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Wheel Steering Connections
21

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Wheel Motor and Gearing
22

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Apollo 17 LRV Wheel and Fender
23

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Wheel Design Details
24
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Wheel Testing
25

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Wheel Deflection
26
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
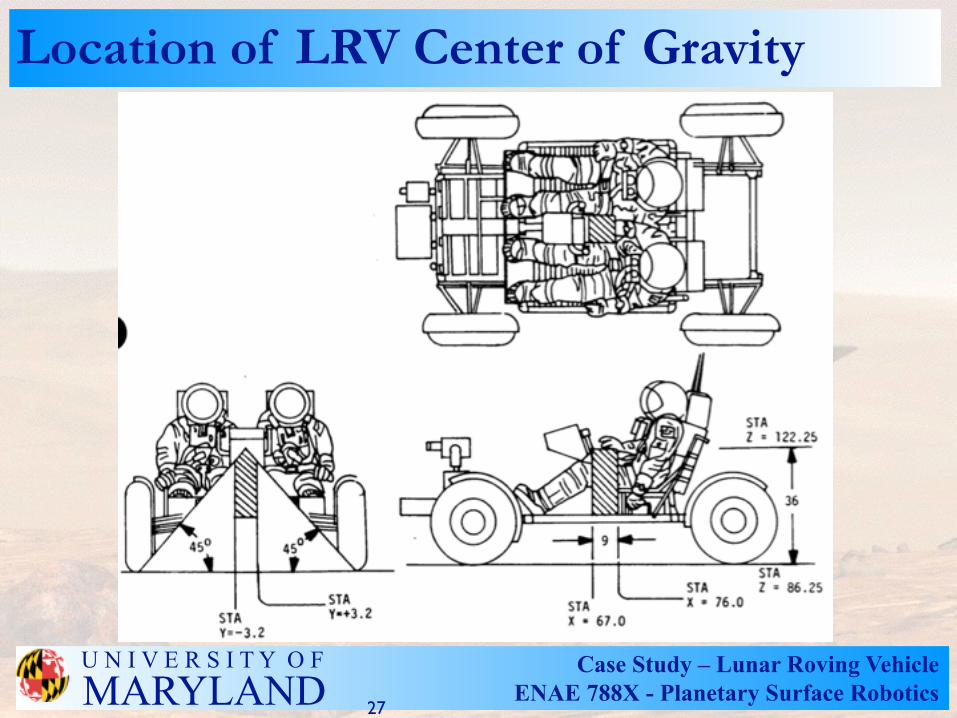
Location of LRV Center of Gravity
27

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Static Stability
28

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Limiting Velocity for Obstacle Impact
29

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Sliding Limit in Turn (µ=0.8)
30

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Overturn Limits in Turning
31
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
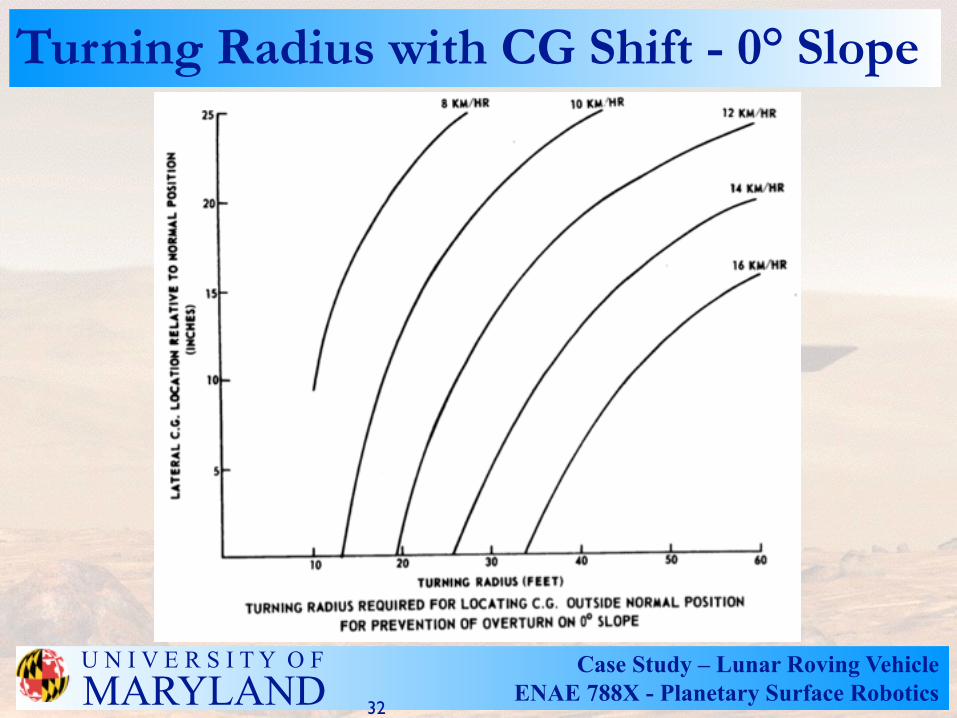
Turning Radius with CG Shift - 0° Slope
32

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Turning Radius with CG Shift - 20° Slope
33

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Turning Radius Limit for Higher CG
34

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Top Speed Limits (Struct. Fatigue)
35

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Power Requirements - 0° Slope
36

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Power Requirements - 5° Slope
37
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
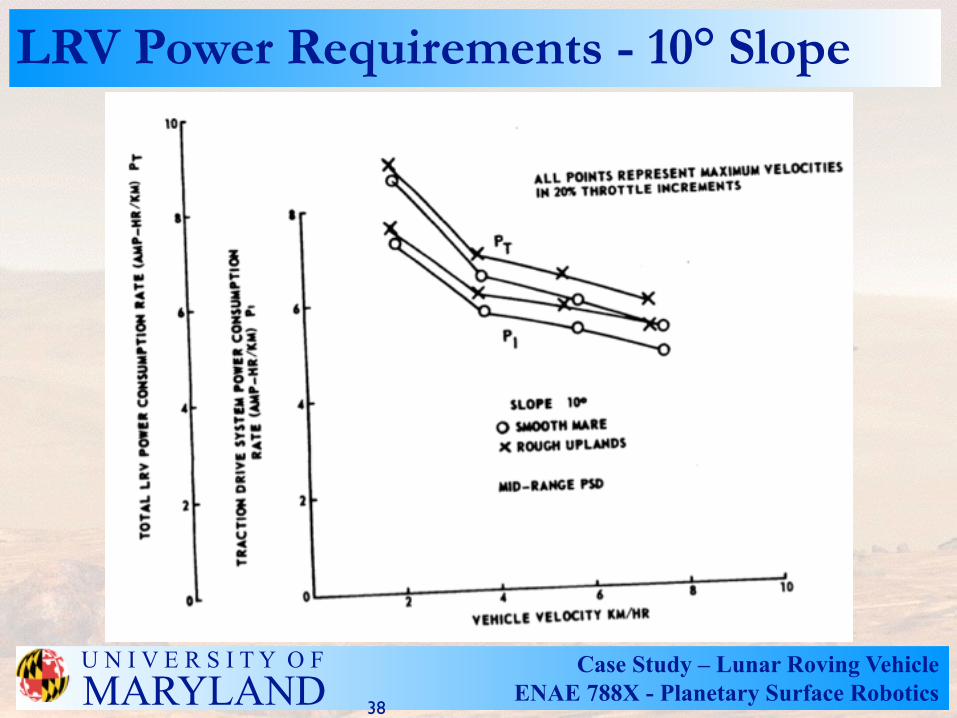
LRV Power Requirements - 10° Slope
38

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Traction Drive Performance
39

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Battery Current vs. Speed
40

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Wheel Motor Temperature vs. Slope
41

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Power Usage by System
42

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Wheel Loading
43

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Drive Motor Characteristics
44

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Stopping Distance vs. Speed/Slope
45
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Terrain Design Cases
• Crevasse crossing capability 70 cm • Step Obstacle Climbing Capability 35 cm • Clearance under chassis 35 cm
46

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
LRV Mobility Parameters
47

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Apollo 15 Terrain (“Lurain”)
48

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Apollo 15 LRV
49

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Apollo 16 “Lunar Grand Prix”
50
Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
Apollo 16 LRV (image stabilized)
51

Case Study – Lunar Roving Vehicle ENAE 788X - Planetary Surface Robotics
U N I V E R S I T Y O FMARYLAND
References
• Glenn C. Miller, “The Lunar Cart” 7th Aerospace Mechanisms Symposium, Houston, Texas, Sept. 2-3, 1972
• Alex B. Hunter and Bryan W. Spacey, “Lunar Roving Vehicle Deployment Mechanism” 7th Aerospace Mechanisms Symposium, Houston, Texas, Sept. 2-3, 1972
• Boeing Company, “LRV Operations Handbook Appendix A (Performance Data” NASA TM-X-66816, April 19, 1971
52