california state university of northridge static
TRANSCRIPT

CALIFORNIA STATE UNIVERSITY OF NORTHRIDGE
Static Synchronous Series Compensator (SSSC) Application & Simulation in Power
System
A graduate project submitted in partial fulfillment of the requirements
For a Master of Science in Electrical Engineering
By
Naif Abushamah
May 2015

ii
The graduate project of Naif Abushamah is approved:
Dr. Xiyi Hang Date
Dr. Benjamin Mallard Date
Dr. Bruno Osorno, Chair Date
California State University, Northridge
iii
Table of Contents
Signature Page .................................................................................................................... ii
List of Figures ..................................................................................................................... v
List of Tables ..................................................................................................................... vi
Abstract ............................................................................................................................. vii
1 Introduction ...................................................................................................................... 1
1.1 Series Controllers ....................................................................................................... 2
1.2 Shunt Controllers ....................................................................................................... 2
1.3 Series-Series Controllers ............................................................................................ 3
1.4 Combined Series-Shunt Controllers .......................................................................... 3
1.5 Objective .................................................................................................................... 3
2 What is SSSC ................................................................................................................... 4
2.1 SSSC Theory .............................................................................................................. 6
2.2 Immunity to Resonance ............................................................................................. 8
2.3 SSSC Rating............................................................................................................... 9
3 Parameters Control......................................................................................................... 10
3.1 Closed Loop Neural Control .................................................................................... 10
3.2 Power Oscillation Damper ....................................................................................... 13
(A) POD Time Constants Calculation and Setting ...................................................... 14
(B) Genetic Algorithm Optimization ........................................................................... 15
a) Chromosome Representation ................................................................................ 16
b) Selection Function ................................................................................................ 16
c) Genetic Operators ................................................................................................. 16
d) Initialization, Termination and Fitness Function .................................................. 17
4 Power System Model ..................................................................................................... 19
4.1 Case 1: Varying Real Power .................................................................................... 21
(A) Simulation One: System Validity .......................................................................... 21
(B) Simulation Two ..................................................................................................... 24
(C) Simulation Three ................................................................................................... 27
4.2 Case 2: Daming L1 Real Power ............................................................................... 30
4.3 Case 3: Daming Rotor Oscillation and Line Power ................................................. 35
(A) Damping Rotor Speed ........................................................................................... 35

iv
(B) Damping both Rotor Speed and Line Power ......................................................... 39
4.4 Results and Discussion ............................................................................................ 42
5. Conclusion .................................................................................................................... 44
Bibliography ..................................................................................................................... 45
Appendix A ....................................................................................................................... 49
Appendix B ....................................................................................................................... 50

v
List of Figures
Figure 1. SSSC single line diagram and control circuit. [43] ...................................................................... 4 Figure 2. SSSC control circuit. [43] .................................................................................................................... 4 Figure 3. SSSC compensation equivalent circuit. [18] .................................................................................. 6 Figure 4. Transmitted power versus compensation voltage Vq. ................................................................. 7 Figure 5. Closed loop neural control first circuit. [23] ................................................................................ 11 Figure 6. Closed loop neural control second circuit. [23] ........................................................................... 12 Figure 7. Power Oscillation Damper (POD) controller ............................................................................... 13 Figure 8. Eigenvalues motion in POD controller. [30] ................................................................................ 14 Figure 9. Flowchart of genetic algorithm. [45] .............................................................................................. 18 Figure 10. Power system model used in the study. ....................................................................................... 19 Figure 11. Case one control circuit. ................................................................................................................... 20 Figure 12. Voltage profile in per unit measured at bus 1. ........................................................................... 21 Figure 13. Current in per unit of line 1 measured at bus 2. ........................................................................ 22 Figure 14. Real power transfer thru line one measured at bus 2. ............................................................. 22 Figure 15. Reactive power transfer thru line one measured at bus 2. ..................................................... 23 Figure 16. Control circuit reference voltage & injected voltage fed to SSSC. .................................... 23 Figure 17. Voltage profile in per unit measured at bus 1. ........................................................................... 24 Figure 18. Current in per unit of line 1 measured at bus 2. ........................................................................ 24 Figure 19. Real power transfer thru line one measured at bus 2. ............................................................. 25 Figure 20. Reactive power transfer thru line one measured at bus 2. ..................................................... 25 Figure 21. Control circuit referenced voltage & injected voltage fed to grid. ...................................... 26 Figure 22. Voltage profile in per unit measured at bus 1. ........................................................................... 27 Figure 23. Current in per unit of line 1 measured at bus 2. ........................................................................ 28 Figure 24. Real power transfer thru line one measured at bus 2. ............................................................. 28 Figure 25. Reactive power transfer thru line one measured at bus 2. ..................................................... 29 Figure 26. Control circuit referenced voltage & injected voltage fed to grid. ...................................... 29 Figure 27. One stage LL controller used in case2. ........................................................................................ 31 Figure 28. GA flowchart process. ....................................................................................................................... 32 Figure 29. Fitness function convergence. ........................................................................................................ 33 Figure 30. Power response to 3Q fault with/out SSSC measured at bus 2. ........................................... 34 Figure 31. Control circuit referenced voltage & injected voltage fed to grid. ...................................... 35 Figure 32. Rotor speed damper control circuit. .............................................................................................. 36 Figure 33. Fitness function convergence. ........................................................................................................ 37 Figure 34. Rotor speed deviation response with SSSC damping. ............................................................ 38 Figure 35. Control circuit referenced voltage & injected voltage fed to grid. ...................................... 38 Figure 36. Case3B control circuit....................................................................................................................... 39 Figure 37. Fitness function convergence. ........................................................................................................ 40 Figure 38. Power response with/out SSSC measured at bus 2. ................................................................. 41 Figure 39. Rotor speed deviation response with/out SSSC damping. ..................................................... 41 Figure 40. Control circuit referenced voltage & injected voltage fed to grid. ...................................... 42

vi
List of Tables
Table 1. Equations 15, 16, & 17 restrains. ....................................................................................................... 31 Table 2. GA operators setting .............................................................................................................................. 32 Table 3. GA final solutions. ................................................................................................................................. 33 Table 4. Rotor speed damper controller parameters. .................................................................................... 36 Table 5. GA final solutions. ................................................................................................................................. 37 Table 6. GA final solutions. ................................................................................................................................. 40 Table 7. Power system model data. .................................................................................................................... 50
vii
Abstract
Static Synchronous Series Compensator (SSSC) Application & Simulation in Power
System
By
Naif Abushamah
Master of Science in Electrical Engineering
Flexible Alternating Current Transmission System (FACTS) idea was first suggested in
late 1980s by Narain G. Hingorani under Electric Power Research Institute (EPRI) power
transmission development. Vast and fast development of industry and population impose
huge increase in power demand. FACTS devices consist of power electronics controllers
that measure system voltage, current, power, etc, and fine tune influential parameters in
transmission system. For instance, both series and shunt FACTS dynamically change
series/shunt line impedance to maintain maximum and stable power transmission
operation. The Static Synchronous Series Compensator (SSSC) is a series FACTS
controller that is used to control power flow and damp power oscillation on power grid.
The objective of this project is to study behavior and applications of SSSC in power
system. First, SSSC topology and principle of operation is explained. Then, SSSC
applications in power system is illustrated. Finally, Genetic Algorithm is utilized to
optimize LL controller in order to set fitness values of controller coefficients. Simulation
is carried out in Matlab platform using Simulink Tool.

1
1. INTRODUCTION
Flexible Alternating Current Transmission System (FACTS) idea was first suggested in
late 1980s by Narain G. Hingorani under Electric Power Research Institute (EPRI) power
transmission development [1]. Vast and fast development of industry and population
impose huge increase in power demand. Not only new power generation is needed but
also transmission line capacity has to be upgraded to match proportional demand.
Environmental and regulatory concerns restrict expansion of electric power transmission
facilities and/or building power plants near loads center. Moreover, power facilities
expansion are thwarted by high cost, land availability and manpower.
The capacity of transmission systems to transmit power is subjected to some limitations,
like thermal limits, voltage magnitude, angular stability, dynamic stability and transient
stability [41]. These factors determine maximum transmitted power without permanent
damage to transmission system. Transmission line structure, length, topology and
equivalent impedance are parameters from which steady state and dynamic behaviors are
derived or studied. FACTS devices consist of power electronics controllers that measure
system voltage, current, power, etc, and fine tune influential parameters in transmission
system. For instance, both series and shunt FACTS dynamically change series/shunt line
impedance to maintain maximum and stable power transmission operation.
These are some of FACTS objectives in power system:
1. Power regulation in prearranged transmission routes.
2. Maximum loading of transmission lines without exceeding thermal boundaries.
3. Controlling outages emergency to avoid total blackouts.

2
4. Damping of oscillations that can damage system vital devices and secure power
continuity. [41]
FACTS are classified based on connection method into four categories, shunt controllers,
series controllers, combined series-shunt controllers and combined series-series
controllers.
1.1 Series Controllers
Series controllers work in two modes of operation. They control real power when injected
voltage is in quadrature with feeder current, otherwise they can control real and reactive
power [41, 42]. Static Synchronous Series Compensator (SSSC), Thyristor-Switched
Series Capacitor (TSSC), and Thyristor-Controlled Series Reactor (TCSR) are series
controllers. They are successfully utilized to control power flow and to damp system
oscillations after disturbances. SSSC is the most popular device in this family due to
multipurpose capability.
1.2 Shunt Controllers
Shunt controllers work in the same manner as series controllers. The only difference is
that they inject current into system instead of voltage at point of common coupling. The
current control strategy is achieved by varying shunt impedance causing variable
injecting current into the system. Shunt Controllers control active & reactive power by
means of injected current angle, hence they are utilized as voltage regulators [41, 42].
Shunt controllers include STATCOM, Thyristor Controlled Inductor (TCR), Thyristor-
Switched Inductor (TSR), Thyristor-Switched Capacitor (TSC), and Thyristor-Switched
Resistor (TCBR).

3
1.3 Series-Series Controllers
Combined series-series controllers comprise of two separate controllers; series controllers
operate in multiline transmission system, and another provide independent reactive power
control for each line of same multiline transmission system [41, 42]. The Interline Power
Flow Controller (IPFC) is an example of this controllers which balance both real and
reactive power flows on transmission lines.
1.4 Combined Series-Shunt Controllers
Combined series-shunt controllers consist of two separate controllers; series and shunt
controllers. Series controllers provide series voltage while Shunt controllers inject current
into the grid. Therefore, when shunt and series controllers are combined, real power can
be exchanged between them thru power links. Combined series-shunt controllers family
include combination of STATCOM & SSSC (UPFC), Phase-Shifting Transformer
Adjusted by Thyristor Switches (TCPST), and Thyristor Controlled Phase Angle
Regulator (TCPAR).
1.5 Objective
The objective of this project is to study behavior and applications of SSSC in power
system. First, SSSC topology and principle of operation is explained. Then, SSSC
applications in power system is illustrated. There are number of approaches to control
SSSC in sake of power stability and control. Lead-Lag (LL) controller is widely used in
industrial application to dynamically control by providing reference voltage
compensation to SSSC. Finally, Genetic Algorithm is utilized to optimize LL controller
in order to set fitness values of controller coefficients. Simulation is carried out in Matlab
platform using Simulink Tool [43].
4
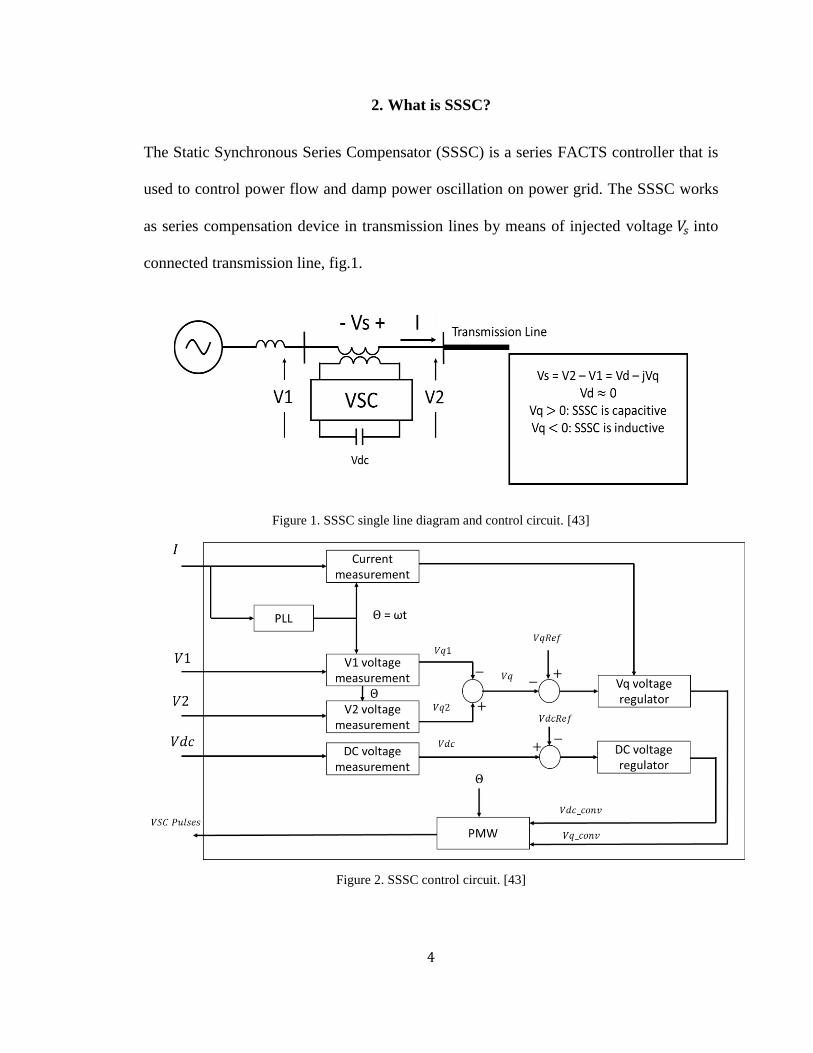
2. What is SSSC?
The Static Synchronous Series Compensator (SSSC) is a series FACTS controller that is
used to control power flow and damp power oscillation on power grid. The SSSC works
as series compensation device in transmission lines by means of injected voltage 𝑉𝑠 into
connected transmission line, fig.1.
Figure 1. SSSC single line diagram and control circuit. [43]
Figure 2. SSSC control circuit. [43]

5
Due to lack of thermal, mechanical or renewable energy conversion to generate real
power, injected voltage 𝑉𝑠 must be in quadrature with line current. A distinguishing
feature of SSSC is its ability to resemble both capacitive and inductive compensation.
Alternating magnitude of imaginary ( 𝑉𝑞 ) part of 𝑉𝑠 forms capacitive or inductive as
follows:
𝑉𝑞 > 0, 𝐼𝑛𝑑𝑢𝑐𝑡𝑖𝑣𝑒
𝑉𝑞 < 0, 𝐶𝑎𝑝𝑎𝑐𝑖𝑡𝑖𝑣𝑒
Alternation of 𝑉𝑞 is achieved by Voltage Sourced Converter (VSC) located on low
voltage side of potential transformer in fig.1. GTOs, IGBTs or IGCTs of VSC employs
forced-commutation to create 𝑉𝑑_𝑐𝑜𝑛𝑣 from DC source [43]. Injected voltage 𝑉𝑠 is 90 out
of phase with line current because of active power drawn from grid to supply coupling
transformer with losses and to charge coupling capacitor. VSC in this model consists of
IGBT-based with Pulse-Width Modulation (PWM). PWM synthesizes sinusoidal voltage
from DC voltage at predetermined cutoff frequency in order of kHz. Eventually, 𝑉𝑐𝑜𝑛𝑣 is
changed in response to varying PWM modulation index. The control circuit consists of
phase locked loop (PLL), measurement system and AC&DC voltage regulators. PLL is
locked to positive sequence current of line to calculate line current argument, or phase
(𝜃 = 𝜔𝑡). This argument is compared with grid three phase voltages and currents (𝑉𝑑,
𝑉𝑞 , 𝐼𝑑 , 𝐼𝑞). Measurement blocks measures grid AC three phase components in addition to
DC voltage of coupling capacitor. [43]

6
2.1 SSSC Theory
As explained previously, SSSC is a series compensation device that injects series voltage
in quadrature with line current. Consider simple representation of equivalent circuit
where SSSC is used to compensate between S and R buses, fig.3.
VS, VR = Active power source voltages
Vq = SSSC injected voltage
The real power transfer thru the transmission line is expressed by following formula [18]:
𝑃 = |𝑉𝑆| ∗ |𝑉𝑅|
𝑋𝐿sin 𝛿 +
𝑉
𝑋𝐿𝑉𝑞 cos( 𝛿/2) (1)
𝛿 = power angle between 𝑉𝑆 & 𝑉𝑅
Consequently, SSSC can either increase or decrees real power transfer by means of
alternating of injected voltage Vq between positive and negative respectively, fig.4.
Crucial fact can be read from equation (1) that if Vq has exceeded voltage drop across
uncompensated transmission line reactance 𝑉𝐿, power flow reverses its direction. That is,
power will flow from bus R towards bus S. In stability studies, SSSC has excellent
subcycle response period, also has continuous and smooth transmission between positive
Figure 3. SSSC compensation equivalent circuit. [18]

7
Figure 4. Transmitted power versus compensation voltage Vq.
and negative voltage compensation [18]. As SSSC creates virtual reactance, either
capacitive or inductive, added in series with transmission line, another way of
considering SSSC is adding its reactance to line reactance in power equation. Therefore,
equation (1) becomes: [23, 31]
𝑃 = |𝑉𝑆| ∗ |𝑉𝑅|
𝑋𝐿 ∓ 𝑋𝑆𝑆𝑆𝐶sin 𝛿 (2)
When XL = XSSSC and XSSSC is negative, denominator of equation (2) is zero and hence
power goes infinity in other words becomes unstable. However, series compensation is
usually defined as varying or changing line impedance values to increase/decrease
transmitted power. In practice, series compensation does so by means of enforcing its
voltage across compensated transmission line to increase/decrease line current thus
controlling transmitted power consequently [31].
0 20 40 60 80 100 120 140 160 180-1
-0.5
0
0.5
1
1.5
2
Tra
nsfe
red P
ow
er
in P
U
Power angle in PU
Transmitted Power versus Injected Voltage
Vq = -0.707
Vq = -0.353
Vq = 0
Vq = 0.353
Vq = 0.707
8
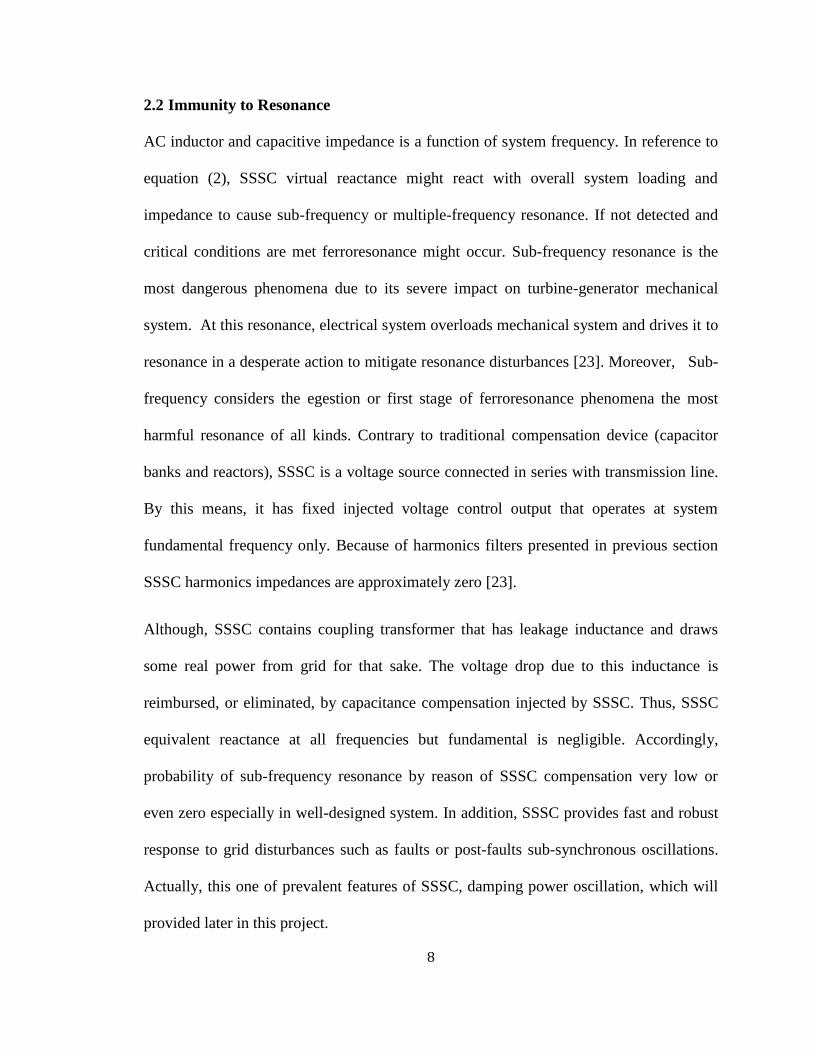
2.2 Immunity to Resonance
AC inductor and capacitive impedance is a function of system frequency. In reference to
equation (2), SSSC virtual reactance might react with overall system loading and
impedance to cause sub-frequency or multiple-frequency resonance. If not detected and
critical conditions are met ferroresonance might occur. Sub-frequency resonance is the
most dangerous phenomena due to its severe impact on turbine-generator mechanical
system. At this resonance, electrical system overloads mechanical system and drives it to
resonance in a desperate action to mitigate resonance disturbances [23]. Moreover, Sub-
frequency considers the egestion or first stage of ferroresonance phenomena the most
harmful resonance of all kinds. Contrary to traditional compensation device (capacitor
banks and reactors), SSSC is a voltage source connected in series with transmission line.
By this means, it has fixed injected voltage control output that operates at system
fundamental frequency only. Because of harmonics filters presented in previous section
SSSC harmonics impedances are approximately zero [23].
Although, SSSC contains coupling transformer that has leakage inductance and draws
some real power from grid for that sake. The voltage drop due to this inductance is
reimbursed, or eliminated, by capacitance compensation injected by SSSC. Thus, SSSC
equivalent reactance at all frequencies but fundamental is negligible. Accordingly,
probability of sub-frequency resonance by reason of SSSC compensation very low or
even zero especially in well-designed system. In addition, SSSC provides fast and robust
response to grid disturbances such as faults or post-faults sub-synchronous oscillations.
Actually, this one of prevalent features of SSSC, damping power oscillation, which will
provided later in this project.

9
2.3 SSSC Rating
SSSC injects compensation voltage in quadrature with feeder current. The voltage
magnitude can be either positive or negative. Therefore, SSSC rating can be expressed in
VA as follows:
𝑆𝑆𝑆𝑆𝐶 = √3 ∗ 𝐼 𝐿𝑖𝑛𝑒 𝑀𝑎𝑥 ∗ 𝑉 𝑆𝑆𝑆𝐶 𝑀𝑎𝑥 (𝑉𝐴) (3)
That is, maximum line current multiplied by maximum injected voltage SSSC is capable
of. For instant, SSSC with 1 pu injected voltage has rating of 2 pu VA due to
positive/negative characteristics of SSSC. Yet, the sake of this study is not determine the
optimal rating of SSSC. So that, later in simulation chapter SSSC might be over sized to
limited injected voltage to 10 percent only of nominal voltage. This constrain avoids
overshooting of injected voltage over recommended voltage provided by controller
during system fault. In addition, voltage restrain reduces required time to reach
maximum and desired damping point. This practice will be touched on surface in
simulation chapter.

10
3. Parameters Control
SSSC can effectively control real and reactive power as well as damp power oscillation
during system disturbances. SSSC accepts reference voltage as recommended scalar of
injected voltage. The reference voltage can be real positive or negative only, for inductive
or capacitive compensation. The reference voltage shall follow desired controlled
parameter. For example, when real power is to be controlled in a transmission line, then
input of control circuit shall be real power measured and output, reference voltage, shall
follow the changed in line power in reference to set point. Likewise, derivative of
generator angular velocity (𝑑𝜔), or rate of change in generator angular speed, might be
also fed into control circuit to acquire less generator oscillation in order to avoid out of
synchronism situation.
3.1 Closed Loop Neural Control
Reference [23] proposes control scheme based on neural topology. As illustrated earlier,
SSSC accepts referenced voltage input to be injected by SSSC into compensated line.
This scheme calculates reference voltage as product of line current and recommended
compensating reactance (𝑋𝑞𝑟𝑒𝑓 ). Though, 𝑋𝑞𝑟𝑒𝑓 is hard to anticipate especially with
dynamic grid switching or operation, not to say grid disturbance when SSSC
compensation is mostly needed. In fig.5, first part of control circuit is depicted showing
three terms (𝑚, 𝛽, 𝑘) derived from referenced power values based on following equations.
𝑃𝑖𝑛𝑠𝑡 =3 𝑉𝑑 𝐼𝑑
2 (𝑊) (4)

11
𝑄𝑖𝑛𝑠𝑡 =3 𝑉𝑞 𝐼𝑞
2 (𝑉𝐴𝑅) (5)
Where currents and voltages are peak values not RMS values. Instantaneous power
quantities are calculated in fig.6 using dq0 transformation. From equations (4, 5),
referenced currents are:
𝐼𝑑𝑟𝑒𝑓 =2 𝑃𝑟𝑒𝑓
3 𝑉𝑑 (6)
𝐼𝑞𝑟𝑒𝑓 =2 𝑄𝑟𝑒𝑓
2 𝑉𝑞 (7)
Figure 5. Closed loop neural control first circuit. [23]
In fig.6, three phase line voltages and currents are measured and transformer into dq0
components. Then measured currents and voltages are compared with calculated ones
derived in fig.5 using equation (6, 7). The error signals are fed into neural controller to
produce displacement angle β and modulation index 𝑚. Instantaneous line voltage angle
12
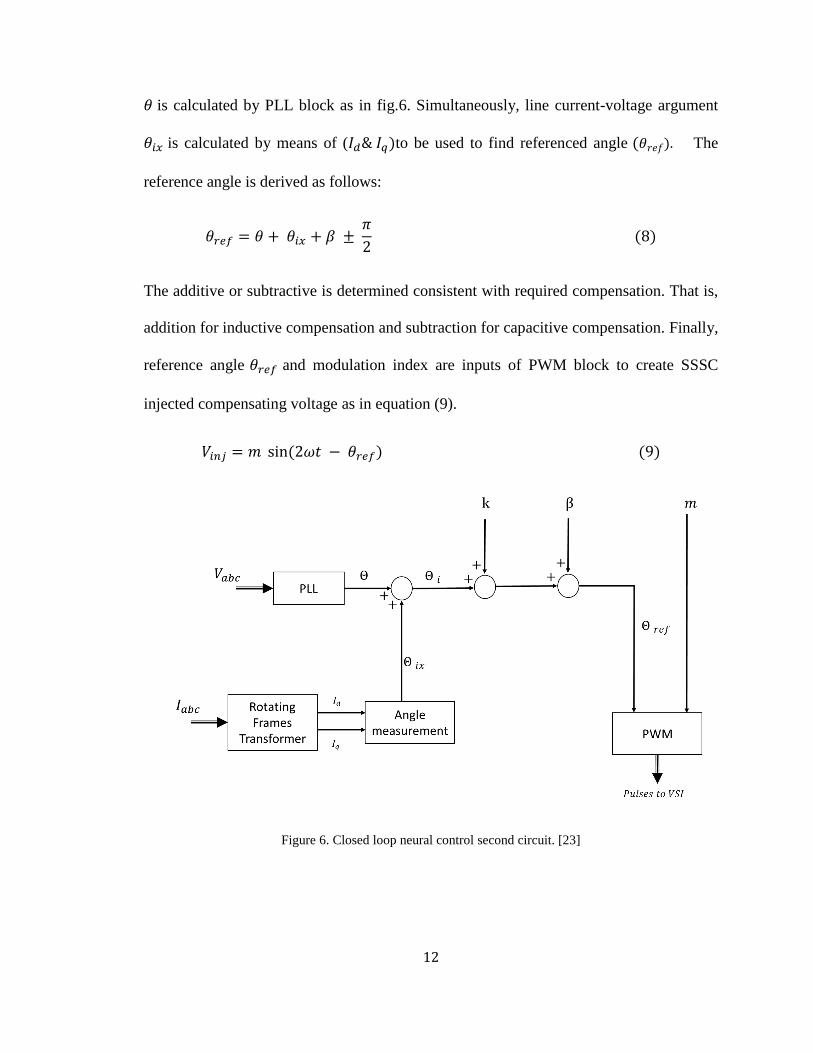
𝜃 is calculated by PLL block as in fig.6. Simultaneously, line current-voltage argument
𝜃𝑖𝑥 is calculated by means of (𝐼𝑑& 𝐼𝑞)to be used to find referenced angle (𝜃𝑟𝑒𝑓). The
reference angle is derived as follows:
𝜃𝑟𝑒𝑓 = 𝜃 + 𝜃𝑖𝑥 + 𝛽 ± 𝜋
2 (8)
The additive or subtractive is determined consistent with required compensation. That is,
addition for inductive compensation and subtraction for capacitive compensation. Finally,
reference angle 𝜃𝑟𝑒𝑓 and modulation index are inputs of PWM block to create SSSC
injected compensating voltage as in equation (9).
𝑉𝑖𝑛𝑗 = 𝑚 sin(2𝜔𝑡 − 𝜃𝑟𝑒𝑓) (9)
Figure 6. Closed loop neural control second circuit. [23]

13
3.2 Power Oscillation Damper
This kind of control is utilized for damping power oscillation during major disturbances
hence call Power Oscillation Damper (POD). POD controller contains gain block, low-
pass filter, washout (high-pass) filter, r stages of lead-lag (LL) blocks see fig.7.
Figure 7. Power Oscillation Damper (POD) controller. [35]
The transfer function of POD controller is as follows:
𝐻(𝑠) = 𝐾 (1
1 + 𝑠𝑇𝑚) (
𝑠𝑇𝑤
1 + 𝑠𝑇𝑤) (
1 + 𝑠𝑇𝑙𝑒𝑎𝑑
1 + 𝑠𝑇𝑙𝑎𝑔)
𝑟
= 𝐾𝑌(𝑠) (10)
Where 𝐾 is a positive gain, 𝑇𝑚 & 𝑇𝑤 are low-pass and washout filters time constant
respectively. The depicted controller in fig.7 contains two stages lead-lag block
hence 𝑟 = 2, and 𝑇𝑙𝑒𝑎𝑑 & 𝑇𝑙𝑎𝑔 are time constants. The low pass filter is designed to filter
high frequency variance of input signal. The washout acts like a high pass filter to pass
signal oscillation unharmed. Therefore, steady state components in input signal will be
eliminated by reaching (LL) blocks. (LL) blocks works as phase compensator to correct
phase shift occurred due to aforementioned two filters. The setting of POD controller
time constants is in next section.

14
(A) POD Time Constants Calculation and Setting
This section introduces calculation of POD parameters based on eigenvalue value and
instantaneous oscillation angle [30]. SSSC provides dynamic series compensation to
damp power oscillation which means eigenvalue λ must change to match dynamic
compensation. Consequently, ∆𝜆𝑖 must always remain in the left half of the complex
plane for controller stability, fig.8 [30]. The compensation angle (∅𝑐𝑜𝑚𝑝), depicted in
fig.4, is the mandatory shift to line up eigenvalue motion in parallel with negative real
axis. This phase shift is introduced by LL block and its time constants, namely 𝑇𝑙𝑒𝑎𝑑 &
𝑇𝑙𝑎𝑔.
Figure 8. Eigenvalues motion in POD controller. [30]

15
The following equation are used to calculated controller parameter.
∅𝑐𝑜𝑚𝑝 = 180 − 𝑎𝑛𝑔(𝑅𝑖) (11)
𝛼𝑐 =𝑇𝑙𝑒𝑎𝑑
𝑇𝑙𝑎𝑔=
1 − 𝑠𝑖𝑛 (∅𝑐𝑜𝑚𝑝
𝑟 )
1 + 𝑠𝑖𝑛 (∅𝑐𝑜𝑚𝑝
𝑟 )
(12)
𝑇𝑙𝑎𝑔 =1
𝑤𝑖√𝛼𝑐
(13)
𝑇𝑙𝑒𝑎𝑑 = 𝛼𝑐𝑇𝑙𝑎𝑔 (13)
Where (𝑎𝑛𝑔(𝑅𝑖)) denotes phase angle of the system residue oscillation [30]. Then, it is
clear that this design depends substantial on estimation or prediction of oscillation residue
which can be a weakness issue.
(B) Genetic Algorithm Optimization
This section discusses employment of Genetic Algorithm (GA) Optimization to predict or
select fittest values of POD time constants. GA is an optimization, or linearization,
method that has been developed to solve sophisticated mathematical and/or engineering
problems when analytical or numerical methods are not beneficial [45]. As strange as it
sounds to be, GA principle is based on biological evolution and natural selection
mechanism. GA creates and operates population of solutions and selects best solutions
based on the fittest strategy. After that, best individuals, or solutions, are mixed
genetically to reproduce and create new set of solutions. The reproduced children are
considered the fittest individual to survive to next generation (iteration). As generations
advance, individuals shall return better results than their own parents in respect to a

16
fitness function. This process continuous until stopping criteria is met. GA has six major
operator, namely: initialization, selection function, chromosome representation, genetic
operators, termination and fitness function that need to be understood and set prior to
utilization. A brief description of each item are to be followed.
a) Chromosome Representation
Chromosome representation option defines problem structure in GA algorithm engine,
and creates appropriate genetic operators. Chromosome is formed of set of genes
following its nature formation in life. Yet, Chromosome is formed digitally as integers,
floating numbers, binary digits, real numbers, matrices, and etc. depending on sought
solution numbers. Usually, natural representations are effective and yield optimum
solution. Real coded representation is recommended for less computation time [45].
b) Selection Function
Selection function is the most significant factor in GA to produce successive generations
towards the best solution. This function provides survive passports for individuals to
proceed to next generation. It is actually a probabilistic function that evaluates or grades
individuals so that only fittest individuals are chosen. Each software offers several
schemes for section function. For instant, Matlab program provides stochastic uniform,
remainder, uniform, roulette and tournament schemes are available.
c) Genetic Operators
Genetic operators are search tools in GA that create new solution out of past generation
solution. There are two main operators, Crossover and Mutation. Crossover selects pairs
of individuals as parents to produce children (new individuals). Mutation, as it does in

17
nature, modifies parents genes so that newly produced children make different solution
than their own parent once did. Crossover has the following options: constraint
dependent, scattered, single point, two point, intermediate, heuristic, and arithmetic.
Mutation has the following options: constraint dependent, Gaussian, uniform, adaptive
feasible.
d) Initialization, Termination and Fitness Function
First, a population is required to start GA procedure. Usually GA chooses lower limits of
user input variables otherwise, initial population is chosen randomly. GA continuously
starts new generation after a generation unless a stopping criterion is satisfied. There are
several stopping conditions are available such as population convergence, maximum
number of generations, solution cannot be improved, and a target value of problem
function is found. Fitness function is the function entered by user that GA uses to
evaluate individuals, or solutions, in order to compare and thus select best solutions. Such
a function could be an error signal in PID controller for simple step input signal. Fig.9 is
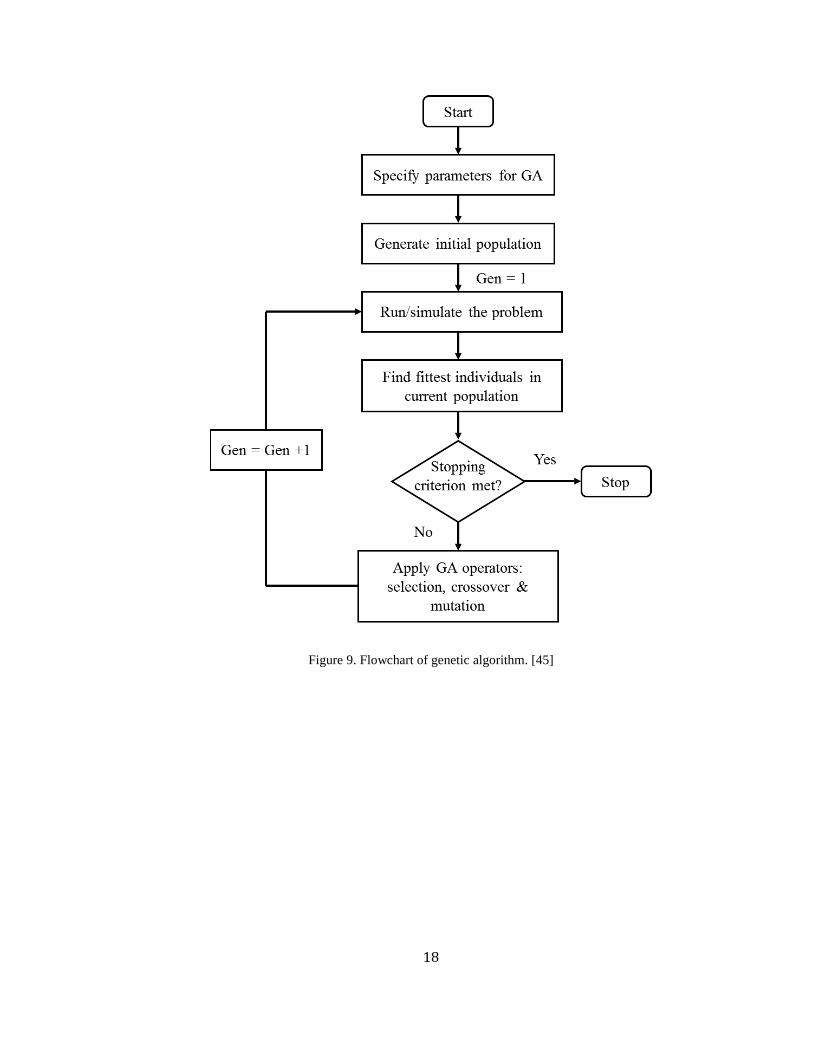
flowchart summarizes GA steps.
18
Figure 9. Flowchart of genetic algorithm. [45]
19
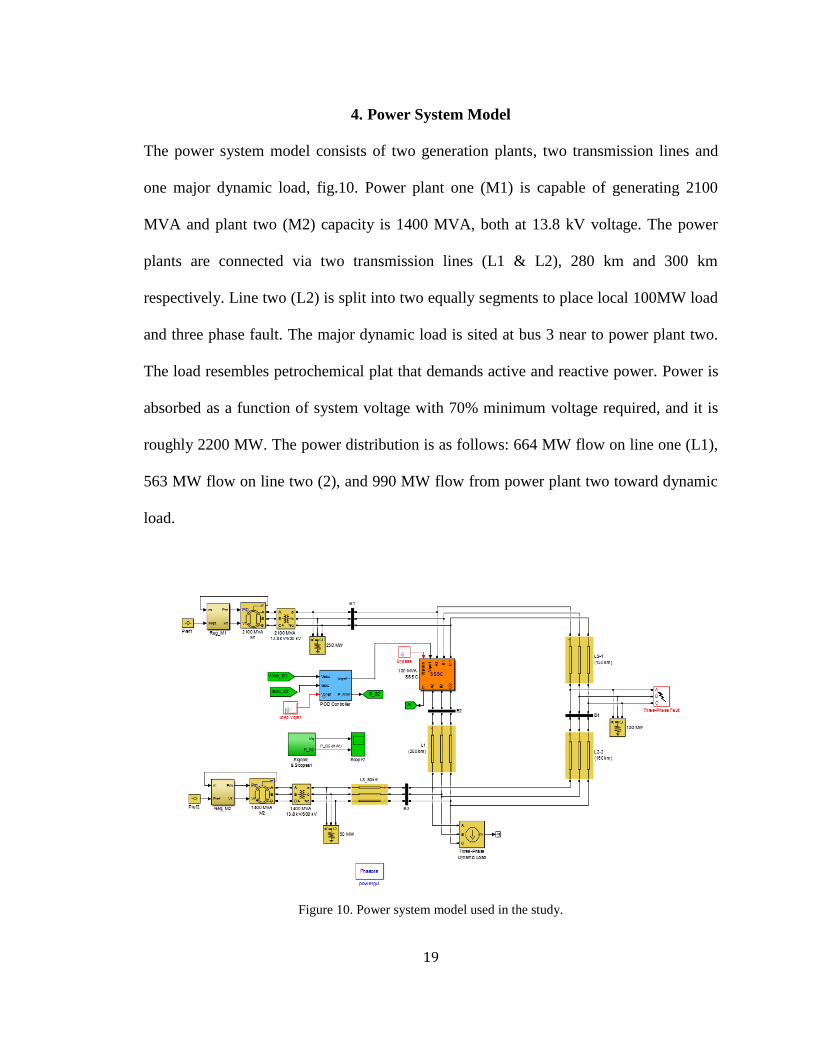
4. Power System Model
The power system model consists of two generation plants, two transmission lines and
one major dynamic load, fig.10. Power plant one (M1) is capable of generating 2100
MVA and plant two (M2) capacity is 1400 MVA, both at 13.8 kV voltage. The power
plants are connected via two transmission lines (L1 & L2), 280 km and 300 km
respectively. Line two (L2) is split into two equally segments to place local 100MW load
and three phase fault. The major dynamic load is sited at bus 3 near to power plant two.
The load resembles petrochemical plat that demands active and reactive power. Power is
absorbed as a function of system voltage with 70% minimum voltage required, and it is
roughly 2200 MW. The power distribution is as follows: 664 MW flow on line one (L1),
563 MW flow on line two (2), and 990 MW flow from power plant two toward dynamic
load.
Figure 10. Power system model used in the study.

20
SSSC rating can be calculated using equation (3) in chapter 2, with maximum 𝑉 𝑆𝑆𝑆𝐶
chosen to be 10 percent and line current is measured from model.
𝑉 𝑆𝑆𝑆𝐶 = 0.1 ∗ 500𝑘 = 50 𝑘𝑉
𝐼 𝑙𝑖𝑛𝑒 ≅ 6.7 ∗ (100𝑀
√3 ∗ 500𝑘) = 774 𝐴𝑚𝑝
𝑆𝑆𝑆𝑆𝐶 = √3 ∗ 𝐼 𝑙𝑖𝑛𝑒 ∗ 𝑉 𝑆𝑆𝑆𝐶 = 67 MVA
Yet, SSSC is chosen to be 100 MVA, that to minimize injected voltage into the grid as
much as possible. Also, it serves stability as it minimize injected voltage rate of change in
respect to time, that is to say how fast SSSC response is. Rapid SSSC response has a
number of disadvantages one of which is oscillation at system dynamic instants. Full
description of each block will be given later in appendix A.
Control circuit contains L1 real power transfer measured at bus 2, simple PID controller
and one stage LL controller.
Figure 11. Case one control circuit.

21
4.1 Case 1: Varying Real Power
This case study demonstrations model validity and then SSSC ability to control power
transfer in line one. This case consists of three simulations: system without SSSC, L1
power is increases to 700 MW by SSSC and L1 power is decrease to 600MW by SSSC.
(A) Simulation One: system validity
Figure 12. Voltage profile in per unit measured at bus 1.
0 5 10 150
0.5
1
1.5
X: 8.09
Y: 1.007
Bus 2 Voltage
Time
PU
22
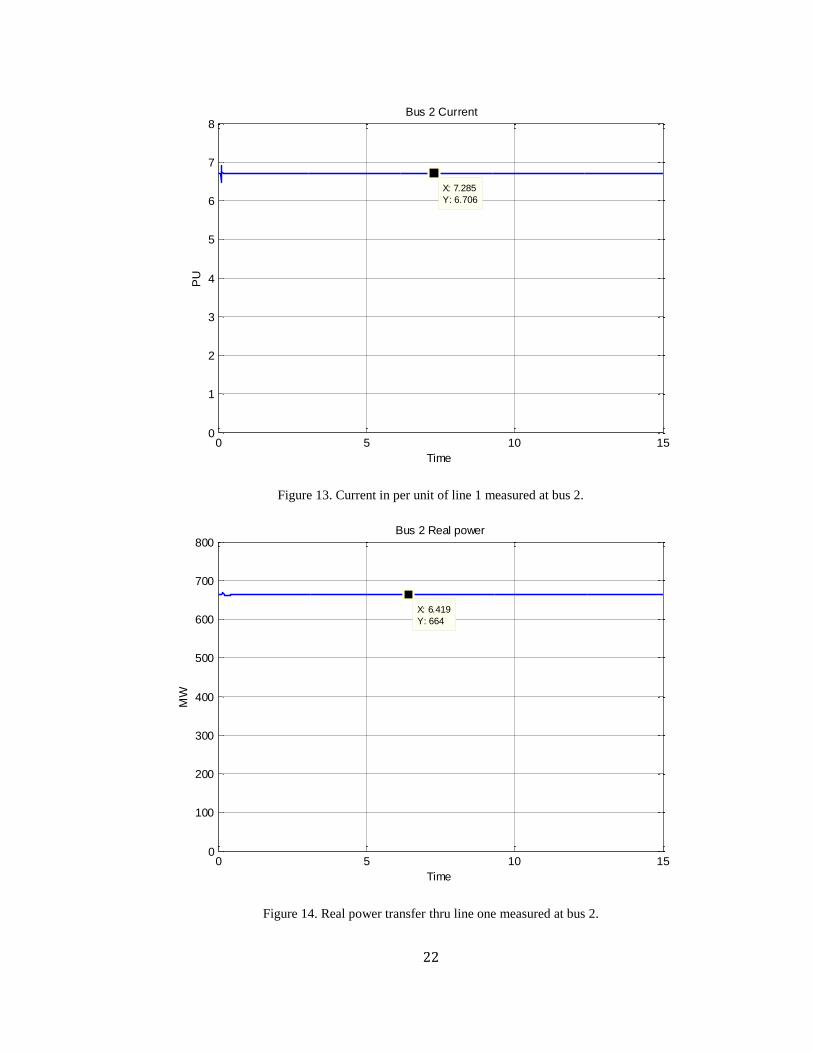
Figure 13. Current in per unit of line 1 measured at bus 2.
Figure 14. Real power transfer thru line one measured at bus 2.
0 5 10 150
1
2
3
4
5
6
7
8
X: 7.285
Y: 6.706
Bus 2 Current
Time
PU
0 5 10 150
100
200
300
400
500
600
700
800
X: 6.419
Y: 664
Bus 2 Real power
Time
MW
23
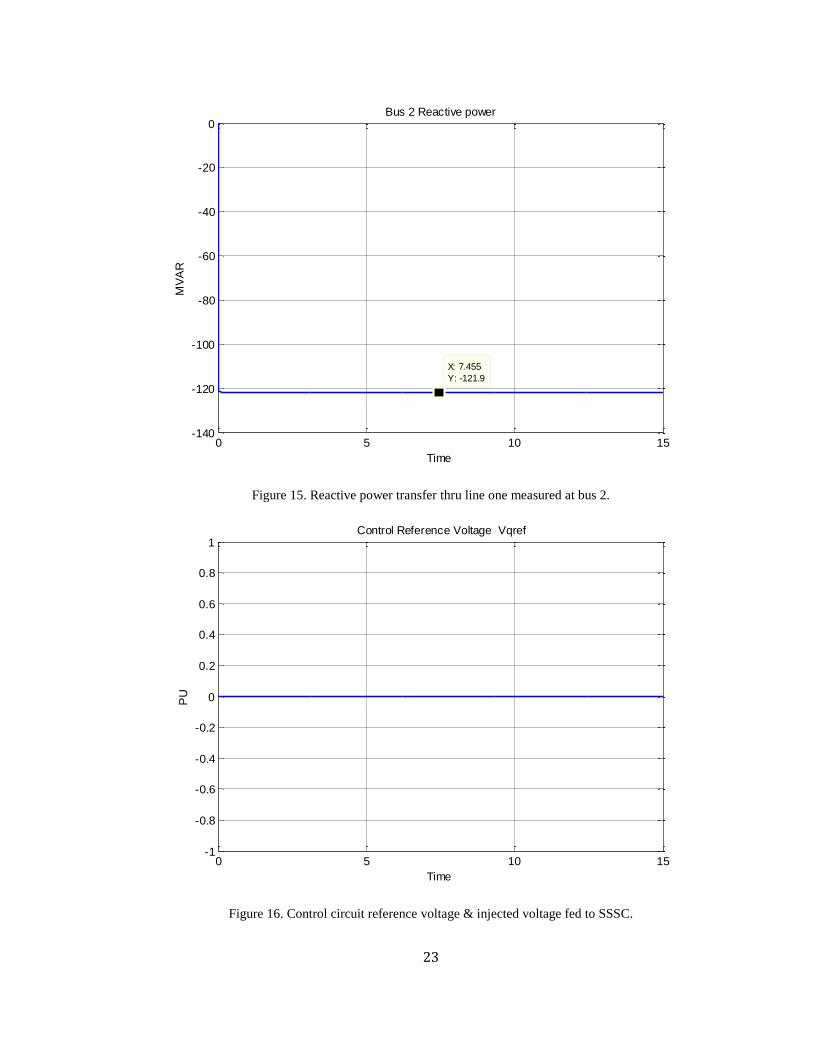
Figure 15. Reactive power transfer thru line one measured at bus 2.
Figure 16. Control circuit reference voltage & injected voltage fed to SSSC.
0 5 10 15-140
-120
-100
-80
-60
-40
-20
0
X: 7.455
Y: -121.9
Bus 2 Reactive power
Time
MV
AR
0 5 10 15-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Control Reference Voltage Vqref
Time
PU

24
(B) Simulation Two: L1 power = 700 MW
Figure 17. Voltage profile in per unit measured at bus 1.
Figure 18. Current in per unit of line 1 measured at bus 2.
0 5 10 150.99
0.995
1
1.005
1.01
1.015
1.02
1.025
X: 7.948
Y: 1.002
Bus 2 Voltage
Time
PU
No SSSC
SSSC
0 5 10 156.4
6.5
6.6
6.7
6.8
6.9
7
7.1
7.2
X: 7.341
Y: 7.091
Bus 2 Current
Time
PU
No SSSC
SSSC

25
Figure 19. Real power transfer thru line one measured at bus 2.
Figure 20. Reactive power transfer thru line one measured at bus 2.
0 5 10 15660
665
670
675
680
685
690
695
700
705
X: 6.916
Y: 700
Bus 2 Real power
Time
MW
No SSSC
SSSC
0 5 10 15-140
-120
-100
-80
-60
-40
-20
0Bus 2 Reactive power
Time
MV
AR
No SSSC
SSSC

26
Figure 21. Control circuit referenced voltage & injected voltage fed to grid.
Note that in fig.21 𝑉𝑞𝑟𝑒𝑓 is the control circuit reference signal to SSSC and 𝑉𝑞𝑖𝑛𝑗 is the
actual injected voltage to grid. Here is a brief calculation of SSSC compensation to L1.
Even though SSSC injected voltage to system is depicted in Fig.21, resultant power
cannot be calculated using fig.21 only. SSSC compensation changes three main
parameters that shall be encountered to correctly get transferred power. Transmission line
sending end voltage, receiving end voltage and equivalent impedance are ought to be
used in equation (2). These three values are obtained from model simulation as follows.
|𝑉 𝑏𝑢𝑠1| = 1.0087 𝑝𝑢
|𝑉 𝑏𝑢𝑠2| = 1.0011 𝑝𝑢
|𝑋 𝑙𝑖𝑛𝑒 ∓ 𝑋 𝑆𝑆𝑆𝐶| = 0.0338 𝑝𝑢
𝛿12 = 𝜃(𝑉 𝑏𝑢𝑠1) − 𝜃(𝑉 𝑏𝑢𝑠2) = 13.6839 𝑑𝑒𝑔
0 5 10 15-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035SSSC Injected Voltage Vqinj
Time
PU
Vqref
Vqinj
27
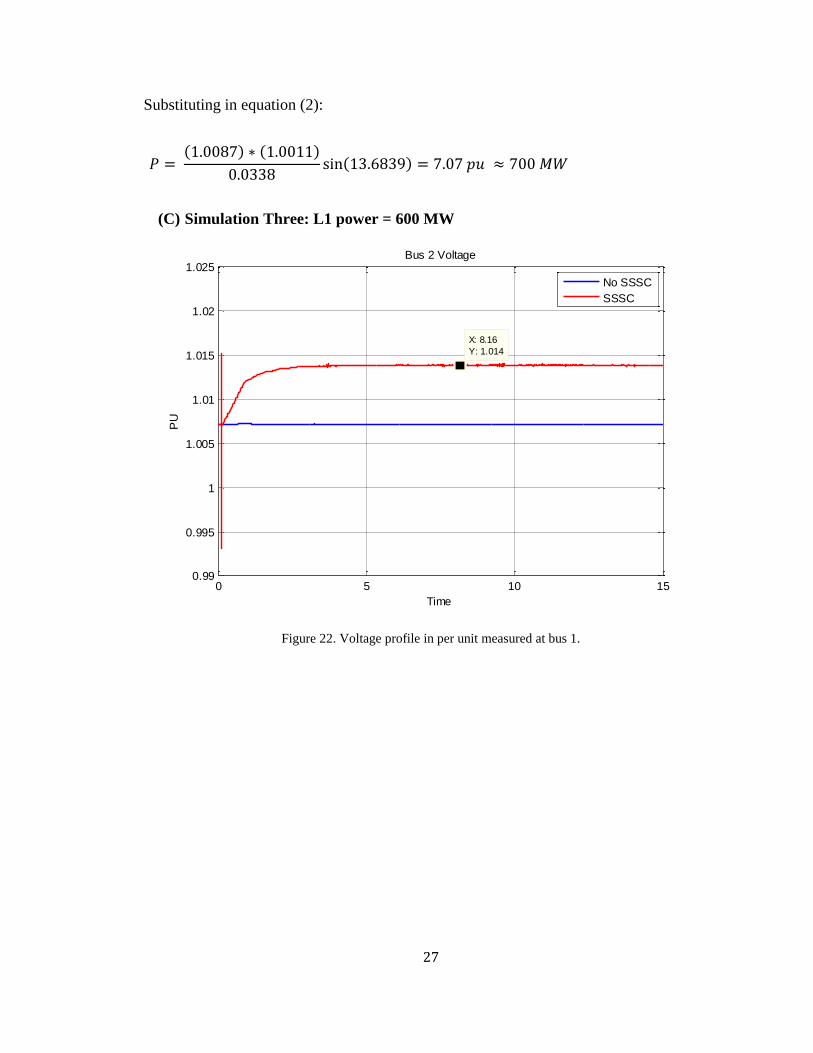
Substituting in equation (2):
𝑃 = (1.0087) ∗ (1.0011)
0.0338sin(13.6839) = 7.07 𝑝𝑢 ≈ 700 𝑀𝑊
(C) Simulation Three: L1 power = 600 MW
Figure 22. Voltage profile in per unit measured at bus 1.
0 5 10 150.99
0.995
1
1.005
1.01
1.015
1.02
1.025
X: 8.16
Y: 1.014
Bus 2 Voltage
Time
PU
No SSSC
SSSC

28
Figure 23. Current in per unit of line 1 measured at bus 2.
Figure 24. Real power transfer thru line one measured at bus 2.
0 5 10 156
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
6.9
7
X: 8.712
Y: 6.035
Bus 2 Current
Time
PU
No SSSC
SSSC
0 5 10 15590
600
610
620
630
640
650
660
670
X: 7.48
Y: 600
Bus 2 Real power
Time
MW
No SSSC
SSSC

29
Figure 25. Reactive power transfer thru line one measured at bus 2.
Figure 26. Control circuit referenced voltage & injected voltage fed to grid.
0 5 10 15-140
-120
-100
-80
-60
-40
-20
0Bus 2 Reactive power
Time
MV
AR
No SSSC
SSSC
0 5 10 15-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01SSSC Injected Voltage Vqinj
Time
PU
Vqref
Vqinj

30
4.2 Case 2: Damping L1 Real Power
After validation of SSSC ability to control real power, this case shows another crucial
feature of SSSC that is power damping during severe power system faults. The Same
model in previous case is used with three-phase-fault applied at 1.333 seconds and
cleared at 1.5 seconds. The fault location is the same as in fig.10 at the middle of line
two. A disturbance, or oscillation, is a deviation of instantaneous power from a designed
or preferred set point, thus (𝑃𝑖𝑛𝑠𝑡 − 𝑃𝑝𝑟𝑒𝑓 ) can be used as an error signal. Hence,
minimizing the error signal leads to minimum power oscillation. In addition, an
integration over simulation time of absolute error signal delivers better result than using
error signal only. The objective equation becomes:
𝐸 = ∫ |𝑃𝑖𝑛𝑠𝑡 − 𝑃𝑝𝑟𝑒𝑓|
𝑡𝑠𝑖𝑚
0
𝑑𝑡 (14)
GA tool will be used to tune Lead-Lag parameters to find minimum value of equation
(14). GA is the best candidate because it employs advance algorithm in a search of fittest
parameters that returns minimum error value. GA runs in generations, or iterations, at
which a group of possible solutions are tested in the system model and fitness function
value is recorded. GA stops when maximum number of generation is exceeded or when a
desired value of fitness function is met. Such a feature makes GA a simulation of
scientific empiricism. GA simulation that runs 100 generations is worth hundred years of
real life experience. GA is designed to minimize equation (14) subjected to following
constrains:
𝐾𝑚𝑖𝑛 ≤ 𝐾 ≤ 𝐾𝑚𝑎𝑥 (15)
𝑇𝑙𝑒𝑎𝑑−𝑚𝑖𝑛 ≤ 𝑇𝑙𝑒𝑎𝑑 ≤ 𝑇𝑙𝑒𝑎𝑑−𝑚𝑎𝑥 (16)
31
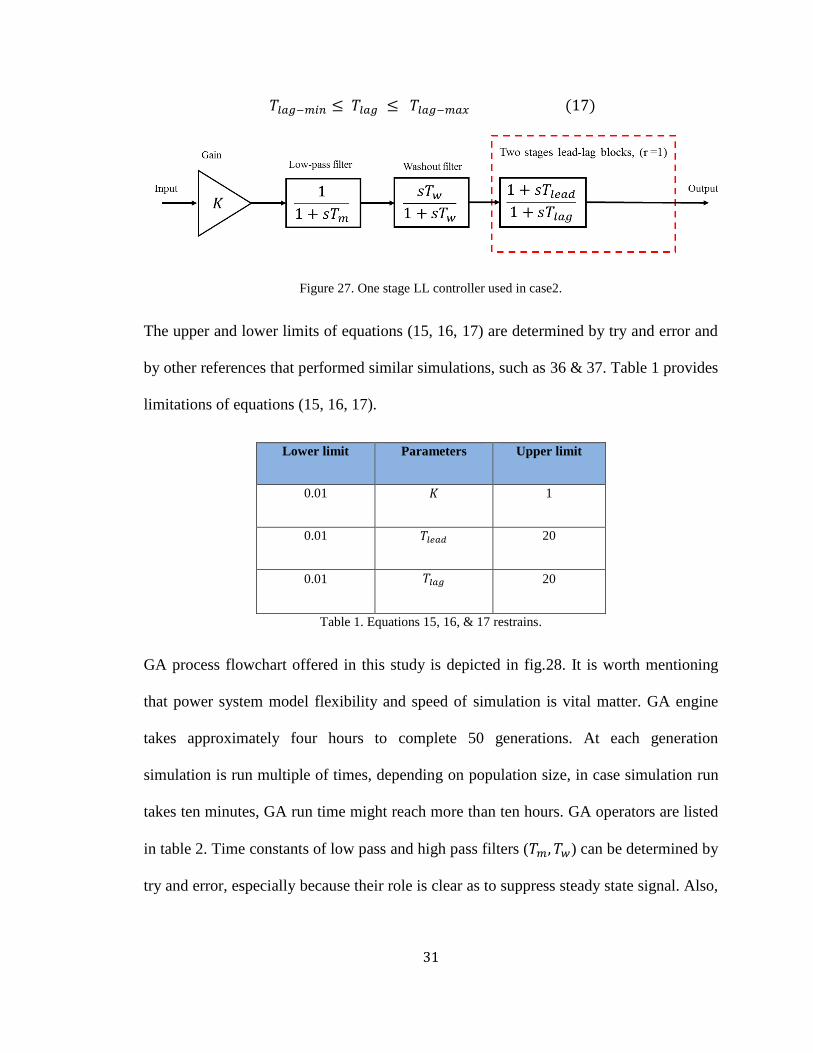
𝑇𝑙𝑎𝑔−𝑚𝑖𝑛 ≤ 𝑇𝑙𝑎𝑔 ≤ 𝑇𝑙𝑎𝑔−𝑚𝑎𝑥 (17)
Figure 27. One stage LL controller used in case2.
The upper and lower limits of equations (15, 16, 17) are determined by try and error and
by other references that performed similar simulations, such as 36 & 37. Table 1 provides
limitations of equations (15, 16, 17).
Lower limit Parameters Upper limit
0.01 𝐾 1
0.01 𝑇𝑙𝑒𝑎𝑑 20
0.01 𝑇𝑙𝑎𝑔 20
Table 1. Equations 15, 16, & 17 restrains.
GA process flowchart offered in this study is depicted in fig.28. It is worth mentioning
that power system model flexibility and speed of simulation is vital matter. GA engine
takes approximately four hours to complete 50 generations. At each generation
simulation is run multiple of times, depending on population size, in case simulation run
takes ten minutes, GA run time might reach more than ten hours. GA operators are listed
in table 2. Time constants of low pass and high pass filters (𝑇𝑚, 𝑇𝑤) can be determined by
try and error, especially because their role is clear as to suppress steady state signal. Also,

32
some references, e.g. 35, 36, 45, suggest that (𝑇𝑚, 𝑇𝑤) values might be in rage of [0 to
0.1] and [1 to 10] respectively. In this case [1e-6, 1] are used for (𝑇𝑚, 𝑇𝑤).
Figure 28. GA flowchart process.
GA Operators Setting
Operator Setting
Population size 50
Fitness scaling Rank
Selection function Uniform
Mutation Constraint dependent
Crossover function Arithmetic
Generations 50
Table 2. GA operators setting

33
Fitness function convergence graph is shown in fig.29, generated from GA tool. The
figure shows fitness function, equation (14), best value for each generation along with
average value for all population size. A fitness function goes to convergence when mean
value matches or come in contact with best value.
Figure 29. Fitness function convergence.
The final solution parameters are tabulated in table 3.
Parameters 𝐾 𝑇𝑙𝑒𝑎𝑑 𝑇𝑙𝑎𝑔
Final Value 0.08 15.759 7.332
Table 3. GA final solutions.
The resultant damping behavior of SSSC is outstanding, fig.30. Line power drops to
almost 200 MW during fault while with SSSC compensation it barely reaches 280 MW.
After clearing fault, line power overshoots passing 900 MW and goes under 700 MW
after 2.4 seconds after which it continue oscillating until 7 seconds. Whereas, when
0 5 10 15 20 25 30 35 40 45 501
2
3
4
5
6
7
8
9
10x 10
4
Generation
Fitness v
alu
e
Best: 16308.4 Mean: 17322.8
Best f itness
Mean fitness

34
compensation is in active it rapidly damps down below 700 at ~ 1.6 second, and then
smoothly reaches nominal line power (664 MW) with oscillation free manner.
Figure 30. Power response to 3Q fault with/out SSSC measured at bus 2.
0 1 2 3 4 5 6 7 8 9 10200
300
400
500
600
700
800
900
1000Bus 2 Real power
Time
MW
No SSSC
SSSC

35
Figure 31. Control circuit referenced voltage & injected voltage fed to grid.
4.3 Case 3: Damping Rotor Oscillation and Line Power
Power system disturbance affects multiple parameters, like power quantity, power
quality, power angle and generator rotor speed. Compensation that minimize deviation in
any, or all, aforementioned parameters leads to quicker damping of oscillation. This study
seeks damping rotor speed as well as line power instantaneously.
(A) Damping Rotor Speed
First, let seek damping rotor oscillation. A fitness function shall be identified to measure
rotor speed deviation due to a disturbance. The chosen function is an integration of
absolute difference between generators angular speed times simulation time period [45].
The fitness function is expressed in equation (18).
𝐷 = ∫ |∆𝜔1 − ∆𝜔2| ∗ 𝑡 𝑑𝑡𝑡𝑠𝑖𝑚
0
(18)
0 1 2 3 4 5 6 7 8 9 10-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15SSSC Injected Voltage Vqinj
Time
PU
Vqref
Vqinj

36
Where (∆𝜔1, ∆𝜔2) are speed deviation of generator one and two respectively. Simulation
goal to find minimum value of equation (18) aiming to enhance system response to
disturbances. The controller is two stages lead-Lag controller similar to fig. 7. The
controller circuit is given in table 4.
Figure 32. Rotor speed damper control circuit.
Rotor speed damper controller
Constants Value
Gain, K [10-500], To be determined by GA
Sensor, 𝑇𝑠 0.001
Washout filter, 𝑇𝑤 10
LL#1, 𝑇1𝑛 , 𝑇1𝑑 [.01-3], To be determined by GA
LL#2, 𝑇2𝑛 , 𝑇2𝑑 [.01-3], To be determined by GA
Table 4. Rotor speed damper controller parameters.
GA is employed to determine controller constants same way it has been used in case. GA
process flowchart and operators are given in fig.28 and table 2 respectively with 60
generations instead of 50.

37
Figure 33. Fitness function convergence.
Fitness function is depicted in fig.33 showing fast and consistent convergence. The final
solution values and figures are as follows.
Parameters 𝐾 𝑇1𝑛 𝑇1𝑑 𝑇2𝑛 𝑇2𝑑
Final Value 300.243 0.0899 0.35 2.88 0.88
Table 5. GA final solutions.
0 10 20 30 40 50 602.5
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
Generation
Fitness v
alu
e
Best: 2.60577 Mean: 2.71153
Best f itness
Mean fitness

38
Figure 34. Rotor speed deviation response with SSSC damping.
Figure 35. Control circuit referenced voltage & injected voltage fed to grid.
0 1 2 3 4 5 6 7 8-4
-3
-2
-1
0
1
2
3x 10
-3dw1 - dw2
Time
rad/s
ec
No SSSC
SSSC
0 1 2 3 4 5 6 7 8-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2SSSC Injected Voltage Vqinj
Time
PU
Vqref
Vqinj

39
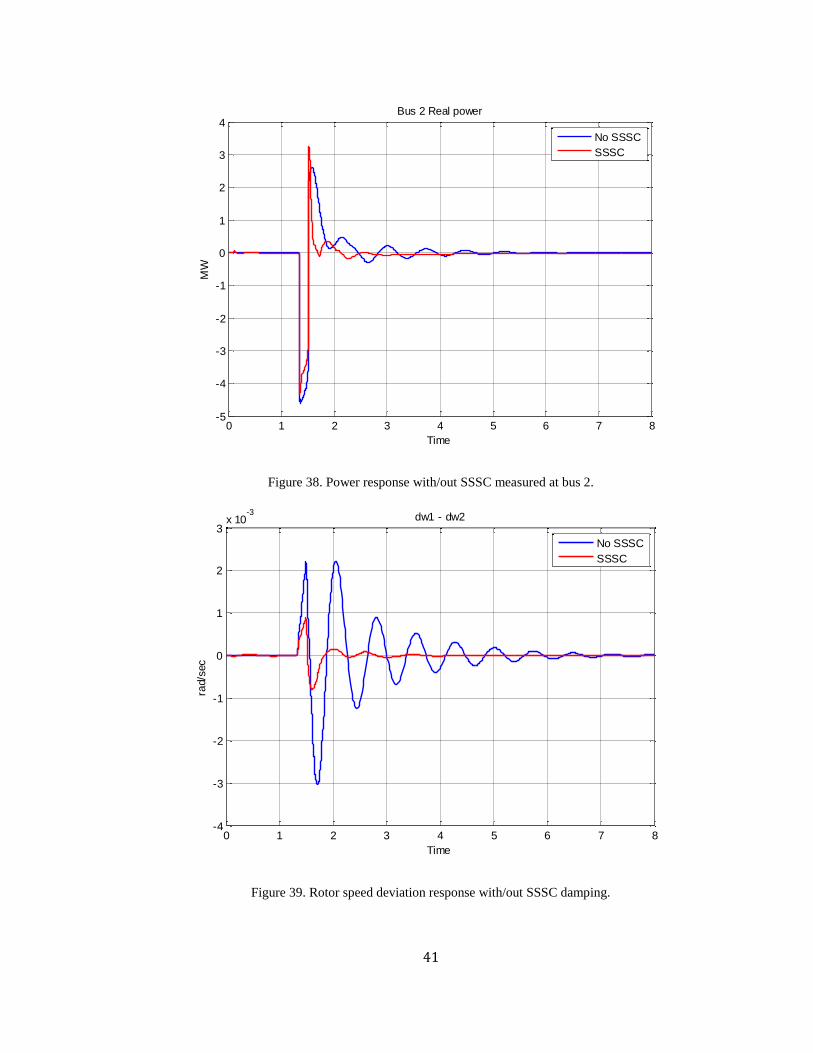
(B) Damping both Rotor Speed and Line Power
Since last simulation did not encounter line power damping, this simulation stabilizes
line power and rotor speed. Rotor speed controller is same as earlier case. Line power
though, is controlled by double stage Lead-Lag controller, fig.36. Ten percent
compensation of nominal voltage provided equally by two controllers, 5% each. GA
tool is run for 100 generations in same manner as earlier to optimize equation (18) and
equation (19) simultaneously and return best value for both controllers’ constants.
Fitness function is an addition of two equations (18&19).
𝐸 = ∫ |𝑃𝑖𝑛𝑠𝑡 − 𝑃𝑝𝑟𝑒𝑓|
𝑡𝑠𝑖𝑚
0
∗ 𝑡 𝑑𝑡 (19)
Figure 36. Case3B control circuit.
The fitness function convergence, final controller values table, and system simulation
figures are below.

40
Figure 37. Fitness function convergence.
Fitness function is depicted in fig.37 showing fast and consistent convergence. The final
solution values and figures are as follows.
Power damper controller Rotor damper controller
K 0.08 K 104.027
LL#1, 𝑇1𝑛 0.619 LL#1, 𝑇1𝑛 0.599
LL#1, 𝑇1𝑑 0.381 LL#1, 𝑇1𝑑 0.664
LL#2, 𝑇1𝑛 0.688 LL#2, 𝑇1𝑛 0.454
LL#2, 𝑇2𝑑 0.69 LL#2, 𝑇2𝑑 0.353
Table 6. GA final solutions.
0 10 20 30 40 50 60 70 80 90 1004.4
4.6
4.8
5
5.2
5.4
5.6
5.8
6
6.2
6.4x 10
4
Generation
Fitness v
alu
e
Best: 44455.8 Mean: 45577.7
Best f itness
Mean fitness
41
Figure 38. Power response with/out SSSC measured at bus 2.
Figure 39. Rotor speed deviation response with/out SSSC damping.
0 1 2 3 4 5 6 7 8-5
-4
-3
-2
-1
0
1
2
3
4Bus 2 Real power
Time
MW
No SSSC
SSSC
0 1 2 3 4 5 6 7 8-4
-3
-2
-1
0
1
2
3x 10
-3dw1 - dw2
Time
rad/s
ec
No SSSC
SSSC

42
Figure 40. Control circuit referenced voltage & injected voltage fed to grid.
4.4 Results and Discussion
Three simulation cases have been carried out on SSSC transmission line compensation
objective. The first case was only demonstration of SSSC capability during normal
operation, showing only power transfer control for particular set points. Last two, SSSC
has been employed to damping power transfer and generator speed during system
disturbances. Study cases utilized lead-lag controller for damping and PID controller to
control line power transfer. Two types of lead-lag controller was used, stage one and
stage two. Stage one was effective in damping transferred power thru transmission line.
The reason behind that is input signal, or error signal, was integer numbers. Also, that’s
why gain value was very small (0.08). The case proves that lead-lag controller structure is
very sensitive hence effective in detection power deviation or disturbance. When power
0 1 2 3 4 5 6 7 8-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15SSSC Injected Voltage Vqinj
Time
PU
Vqref
Vqinj

43
remains fixed or in steady state condition no compensation is injected. Case two is a solid
evidence on SSSC capability of limiting power drop during faults and elimination of post
fault oscillations. On other hand, small error signal and fast oscillations require two stage
lead-lag controller, as in case two. Final case shows SSSC flexibility to control two
deviations at same time, power line and rotor speed. Therefore, SSSC can be used to
serve multiple tasks such as power factor correction, maximize power transfer and
generator oscillations.
44
5. Conclusion
Due to Vast and fast development of industry and population impose huge increase in
power demand. Not only new power generation is needed but also transmission line
capacity has to be upgraded to match proportional demand. SSSC is a series FACTS
device that used for transmission line compensate to control transferred power and damp
system oscillations during disturbances. The scope of this project is to demonstrate
behavior and applications of SSSC in power system. Three simulation cases have been
carried out in Matlab Simulink tool. The cases have been carried out on power system
model with SSSC installed in series with transmission line. The first case was only
demonstration of SSSC capability during normal operation, showing only power transfer
control for particular set points. Last two, SSSC has been employed to damping power
transfer and generator speed during system disturbances. Achieved results are in approval
with theoretical predictions of device functioning and capability. SSSC behavior in
different conditions was outstanding in all cases. Lead-Lag controller was used in two
kinds, stage one and two. GA tool was employed to optimize selected fitness function,
usually error signal, to tune controller constants. GA tool optimization improves SSSC
compensation performance and hence power system oscillations are successfully
eliminated or damped out even during severe faults conditions. Finally, fast and dynamic
response qualifies SSSC for further research and improvement to meet desired system
disturbance damping and power controlling.

45
Bibliography
[1] Gjerde, J.O., et al, “Use of HVDC and FACTS-components for enhancement of power system
stability”, Electrotechnical Conference, 1996. MELECON '96., 8th Mediterranean
[2] Wang, Y., et al, “Power System Load Modeling”, Power System Technology, 1998. Proceedings.
POWERCON '98. 1998 International Conference
[3] Reed, G.F., et al, “Applications of Voltage Source Inverter (VSI) Based Technology for FACTS
and Custom Power Installations”, Power System Technology, 2000. Proceedings. PowerCon
2000. International Conference
[4] Moran, L., “Power Electronics Applications in Utility Systems”, Industrial Electronics Society,
2003. IECON '03. The 29th Annual Conference of the IEEE
[5] Milano, F., “An Open Source Power System Analysis Toolbox”, Power Systems, IEEE
Transactions, Aug. 2005
[6] Oskoui, A., et al, “Holly STATCOM - FACTS to Replace Critical Generation, Operational
Experience”, Po Transmission and Distribution Conference and Exhibition, 2005/2006 IEEE PES
[7] Sullivan, D., “Design and Application of a Static VAR Compensator for Voltage Support in the
Dublin, Georgia Area”, Transmission and Distribution Conference and Exhibition, 2005/2006
IEEE PES
[8] Pourbeik, P., et al, “Operational Experiences with SVCs for Local and Remote Disturbances”,
Power Systems Conference and Exposition, 2006. PSCE '06. 2006 IEEE PES
[9] Kowalski, J., et al, “Application of Static VAR Compensation on the Southern California Edison
System to Improve Transmission System Capacity and Address Voltage Stability Issues - Part 1.
Planning, Design and Performance Criteria Considerations”, Power Systems Conference and
Exposition, 2006. PSCE '06. 2006 IEEE PES

46
[10] Sullivan, D., et al, “Voltage Control in Southwest UtahWith the St. George Static Var System”,
Power Systems Conference and Exposition, 2006. PSCE '06. 2006 IEEE PES
[11] Hassink, P., et al, “Dynamic Reactive Compensation System for Wind Generation Hub”, Power
Systems Conference and Exposition, 2006. PSCE '06. 2006 IEEE PES
[12] Poshtan, M., Singh, B.N., Rastgoufard, P., “A Nonlinear Control Method for SSSC to Improve
Power System Stability”, Power Electronics, Drives and Energy Systems, 2006. PEDES '06.
International Conference
[13] Paserba, J., “Recent Power Electronics/FACTS Installations to Improve Power System Dynamic
Performance”, Power Engineering Society General Meeting, 2007. IEEE
[14] Huang, A.Q., et al, “Active Power Management of Electric Power System Using Emerging Power
Electronics Technology”, Power Engineering Society General Meeting, 2007. IEEE
[15] Kumar, N., et al, “Damping Subsynchronous Oscillations in Power System Using Shunt and Series
Connected FACTS Controllers”, Power, Control and Embedded Systems (ICPCES), 2010
International Conference
[16] Aggarwal, G., et al, “MATLAB/Simulink Based Simulation of a Hybrid Power Flow Controller”,
Advanced Computing & Communication Technologies (ACCT), 2014 Fourth International
Conference
[17] Dejvises, J., Green, T.C., “Control of a Unified Power Flow Controller in Fault Recovery and
With Harmonic Filter”, Power Electronics and Variable Speed Drives, 2000. Eighth International
Conference
[18] Saraf, N., et al. “A Model of the Static Synchronous Series Compensator for the Real Time Digital
Simulator”, Future Power Systems, 2005 International Conference

47
[19] Liu Qing, et al, “Study and Simulation of SSSC and TCSC Transient Control Performance”, Power
System Technology and IEEE Power India Conference, 2008. POWERCON 2008. Joint
International Conference
[20] Ye, Y., et al, “Current-Source Converter Based SSSC: Modeling and Control”, Power
Engineering Society Summer Meeting, 2001
[21] Vyakaranam, B., et al, “Dynamic Harmonic Evolution in FACTS via the Extended Harmonic
Domain Method”, Power and Energy Conference at Illinois (PECI), 2010
[22] Sarvi, G.A., Bina, M.T., “SSSC Circuit Model for Three-wire Systems Coupled with Delta-
Connected Transformer”, Power and Energy Engineering Conference (APPEEC), 2010 Asia-
Pacific
[23] Padma, S., et al., “Neural Network Controller for Static Synchronous Series Compensator (SSSC)
in Transient Stability Analysis”, Power Electronics (IICPE), 2010 India International Conference
[24] Faridi, M., et al., “Power System Stability Enhancement Using Static Synchronous Series
Compensator (SSSC)”, Computer Research and Development (ICCRD), 2011 3rd International
Conference
[25] Raphael, S., Massoud, A.M., “Static Synchronous Series Compensator for Low Voltage Ride
Through Capability of Wind Energy Systems”, Renewable Power Generation (RPG 2011), IET
Conference
[26] Muruganandham, J., Gnanadass, R., “Performance Analysis of Interline Power Flow Controller
for Practical Power System”, Electrical, Electronics and Computer Science (SCEECS), 2012
IEEE Students' Conference
[27] Kumar, S.A., “Multi Machine Power System Stability Enhancement Using Static Synchronous
Series Compensator (SSSC)”, Computing, Electronics and Electrical Technologies (ICCEET),
2012 International Conference

48
[28] Li Wang, Quang-Son Vo, “Power Flow Control and Stability Improvement of Connecting an
Offshore Wind Farm to a One-Machine Infinite-Bus System Using a Static Synchronous Series
Compensator”, Sustainable Energy, IEEE Transactions, April 2013
[29] Kamboj, N., et al, “A Comparative Study of Damping Subsynchronous Resonance Using SSSC and
STATCOM”, Power Electronics (IICPE), 2012 IEEE 5th India International Conference
[30] Anwer, N., et al, “Analysis of UPFC, SSSC with and without POD in Congestion Management of
Transmission System”, Power Electronics (IICPE), 2012 IEEE 5th India International Conference
[31] Gyugyi, Laszlo, et al, “Static Synchronous Series Compensator: A Solid-State Approach to the
Series Compensation of Transmission Lines”, Power Engineering Review, IEEE, Jan 1997
[32] Faried, S.O., et al, “The Use of Static Synchronous Series Compensator for Improving Power
System Stability in Response to Selective-Pole Switching”, Innovative Smart Grid Technologies
Conference Europe (ISGT Europe), 2010 IEEE PES
[33] Ugalde-Loo, C.E., et al, “Comparison between Series and Shunt FACTS Controllers using
Individual Channel Analysis and Design”, Universities Power Engineering Conference (UPEC),
2010 45th International
[34] Chauhan, Y.K., et al, “Performance of a Three-Phase Self-Excited Induction Generator with Static
Synchronous Series Compensator”, Power Electronics, Drives and Energy Systems (PEDES) &
2010 Power India, 2010 Joint International Conference
[35] Taheri, H., et al, “Application of Synchronous Static Series Compensator (SSSC) on Enhancement
of Voltage Stability and Power Oscillation Damping”, EUROCON 2009, EUROCON '09. IEEE
[36] Su, Chi, Chen, Zhe, “Damping Inter-Area Oscillations Using Static Synchronous Series
Compensator (SSSC)”, Universities' Power Engineering Conference (UPEC), Proceedings of 2011
46th International

49
[37] Narne, R., “Damping of Inter-area Oscillations in Power System using Genetic Optimization
Based Coordinated PSS with FACTS Stabilizers”, India Conference (INDICON), 2012 Annual
IEEE
[38] Narne, R., Panda, P.C., “Optimal Coordinate Control of PSS with Series and Shunt FACTS
Stabilizers for Damping Power Oscillations”, Power Electronics, Drives and Energy Systems
(PEDES), 2012 IEEE International Conference
[39] Weihao Hu, et al “Comparison Study of Power System Small Signal Stability Improvement Using
SSSC and STATCOM”, Industrial Electronics Society, IECON 2013 - 39th Annual Conference of
the IEEE
[40] Kotwal, C., et al “Improving Power Oscillation Damping Using Static Synchronous Series
Compensator”, India Conference (INDICON), 2013 Annual IEEE
[41] Georgilakis, P., Vernados, P., “Flexible AC Transmission System Controllers: An Evaluation”,
Materials Science Forum, Trans Tech Publications, Switzerland, 2011
[42] Kumar, P., et al, “Static Synchronous series Compensator for Series Compensation of EHV
Transmission Line”, International Journal of Advanced Research in Electrical, Electronics and
Instrumentation Engineering, Vol. 2, Issue 7, July 2013
[43] Mathworks Inc, website.
<http://www.mathworks.com/help/physmod/sps/powersys/ref/staticsynchronousseriescompensator
phasortype.html?searchHighlight=SSSC>
[44] Falehi, A.D. et al, “Coordinated design of PSSs and SSSC-based damping controller based on GA
optimization technique for damping of power system multi-mode oscillations”, Power Electronics,
Drive Systems and Technologies Conference (PEDSTC), 2011
[45] Panda, G., Rautraya, P., “Damping of Oscillations in Multi Machine Integrated Power Systems by
SSSC Based Damping Controller Employing Modified Genetic Algorithms”, International Journal
of Electrical, Computer, Electronics and Communication Engineering Vol:8 No:2, 2014
50
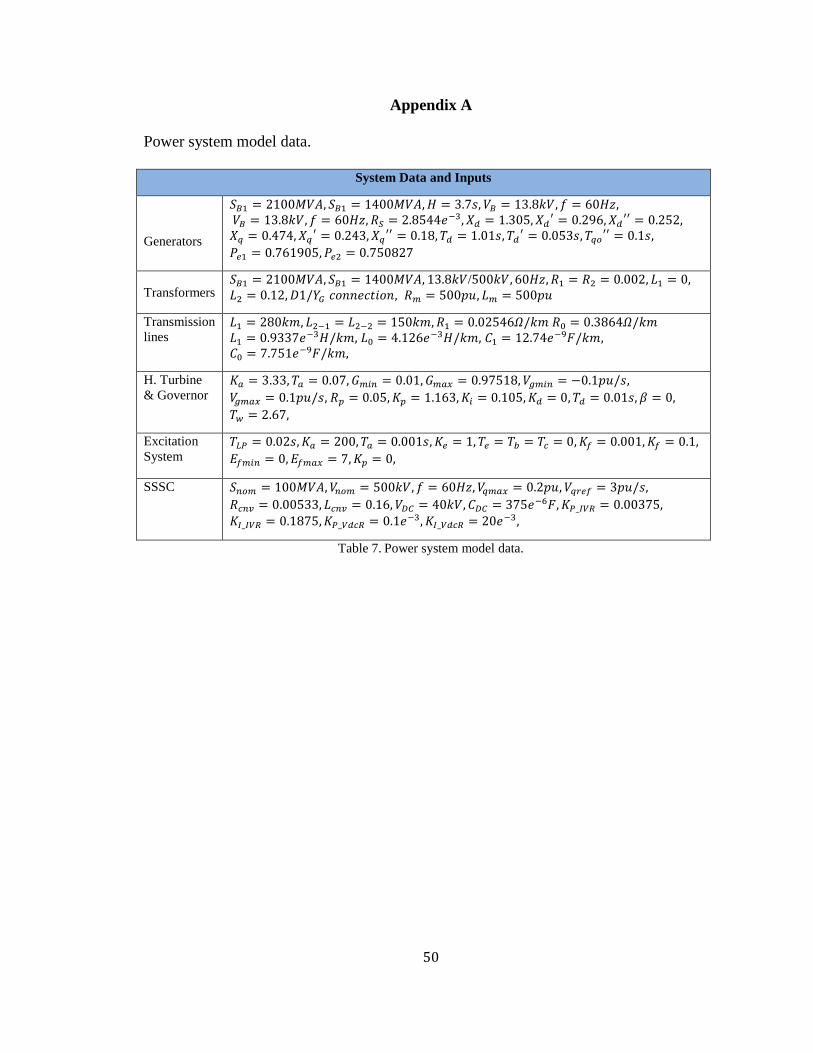
Appendix A
Power system model data.
System Data and Inputs
Generators
𝑆𝐵1 = 2100𝑀𝑉𝐴, 𝑆𝐵1 = 1400𝑀𝑉𝐴, 𝐻 = 3.7𝑠, 𝑉𝐵 = 13.8𝑘𝑉, 𝑓 = 60𝐻𝑧, 𝑉𝐵 = 13.8𝑘𝑉, 𝑓 = 60𝐻𝑧, 𝑅𝑆 = 2.8544𝑒−3, 𝑋𝑑 = 1.305, 𝑋𝑑
′ = 0.296, 𝑋𝑑′′ = 0.252,
𝑋𝑞 = 0.474, 𝑋𝑞′ = 0.243, 𝑋𝑞
′′ = 0.18, 𝑇𝑑 = 1.01𝑠, 𝑇𝑑′ = 0.053𝑠, 𝑇𝑞𝑜
′′ = 0.1𝑠,
𝑃𝑒1 = 0.761905, 𝑃𝑒2 = 0.750827
Transformers 𝑆𝐵1 = 2100𝑀𝑉𝐴, 𝑆𝐵1 = 1400𝑀𝑉𝐴, 13.8𝑘𝑉/500𝑘𝑉, 60𝐻𝑧, 𝑅1 = 𝑅2 = 0.002, 𝐿1 = 0, 𝐿2 = 0.12, 𝐷1/𝑌𝐺 𝑐𝑜𝑛𝑛𝑒𝑐𝑡𝑖𝑜𝑛, 𝑅𝑚 = 500𝑝𝑢, 𝐿𝑚 = 500𝑝𝑢
Transmission
lines 𝐿1 = 280𝑘𝑚, 𝐿2−1 = 𝐿2−2 = 150𝑘𝑚, 𝑅1 = 0.02546𝛺/𝑘𝑚 𝑅0 = 0.3864𝛺/𝑘𝑚
𝐿1 = 0.9337𝑒−3𝐻/𝑘𝑚, 𝐿0 = 4.126𝑒−3𝐻/𝑘𝑚, 𝐶1 = 12.74𝑒−9𝐹/𝑘𝑚, 𝐶0 = 7.751𝑒−9𝐹/𝑘𝑚,
H. Turbine
& Governor 𝐾𝑎 = 3.33, 𝑇𝑎 = 0.07, 𝐺𝑚𝑖𝑛 = 0.01, 𝐺𝑚𝑎𝑥 = 0.97518, 𝑉𝑔𝑚𝑖𝑛 = −0.1𝑝𝑢/𝑠, 𝑉𝑔𝑚𝑎𝑥 = 0.1𝑝𝑢/𝑠, 𝑅𝑝 = 0.05, 𝐾𝑝 = 1.163, 𝐾𝑖 = 0.105, 𝐾𝑑 = 0, 𝑇𝑑 = 0.01𝑠, 𝛽 = 0, 𝑇𝑤 = 2.67,
Excitation
System 𝑇𝐿𝑃 = 0.02𝑠, 𝐾𝑎 = 200, 𝑇𝑎 = 0.001𝑠, 𝐾𝑒 = 1, 𝑇𝑒 = 𝑇𝑏 = 𝑇𝑐 = 0, 𝐾𝑓 = 0.001, 𝐾𝑓 = 0.1, 𝐸𝑓𝑚𝑖𝑛 = 0, 𝐸𝑓𝑚𝑎𝑥 = 7, 𝐾𝑝 = 0,
SSSC 𝑆𝑛𝑜𝑚 = 100𝑀𝑉𝐴, 𝑉𝑛𝑜𝑚 = 500𝑘𝑉, 𝑓 = 60𝐻𝑧, 𝑉𝑞𝑚𝑎𝑥 = 0.2𝑝𝑢, 𝑉𝑞𝑟𝑒𝑓 = 3𝑝𝑢/𝑠,
𝑅𝑐𝑛𝑣 = 0.00533, 𝐿𝑐𝑛𝑣 = 0.16, 𝑉𝐷𝐶 = 40𝑘𝑉, 𝐶𝐷𝐶 = 375𝑒−6𝐹, 𝐾𝑃_𝐼𝑉𝑅 = 0.00375, 𝐾𝐼_𝐼𝑉𝑅 = 0.1875, 𝐾𝑃_𝑉𝑑𝑐𝑅 = 0.1𝑒−3, 𝐾𝐼_𝑉𝑑𝑐𝑅 = 20𝑒−3,
Table 7. Power system model data.

51
Appendix B
Matlab codes.
%Case 1A
V1 = V1_A.data;
V1T = V1_A.time;
V2 = V2_A.data;
V2T = V2_A.time;
V3 = V3_A.data;
V3T = V3_A.time;
I2 = I2_A.data;
I2T = I2_A.time;
P = P_B2.data;
PT = P_B2.time;
Q = Q_B2.data;
QT = Q_B2.time;
% voltages
figure
plot(V2T, abs(V2),'-b'), title('Bus 2 Voltage'), xlabel('Time'),
ylabel('PU'), grid
axis([min(V2T) max(V2T) 0 1.5 ])
% current
figure
plot(I2T, abs(I2),'-b'), title('Bus 2 Current'), xlabel('Time'),
ylabel('PU'), grid
axis([min(V2T) max(V2T) 0 8 ])
% Real Power
figure
plot(PT, P,'-b'), title('Bus 2 Real power'), xlabel('Time'),
ylabel('MW'), grid
axis([min(PT) max(PT) 0 800 ])
% Reactive Power
figure
plot(QT, Q,'-b'), title('Bus 2 Reactive power'), xlabel('Time'),
ylabel('MVAR'), grid
% Ref & Injected voltage
figure
plot(Vqref_pu.time, Vqref_pu.data,'-b'), title('Control Reference
Voltage Vqref'), xlabel('Time'), ylabel('PU'), grid
%helpful codes for calculation
figure, compass(V1_A.data(end)), figure, compass(V3_A.data(end)),
theta = (angle(V1_A.data(end)) - angle(V3_A.data(end)))*180/pi
abs(V1_A.data(end)), abs(V3_A.data(end))
52
%Case 1B
V1 = V1_A.data;
V1T = V1_A.time;
V2 = V2_A.data;
V2T = V2_A.time;
V3 = V3_A.data;
V3T = V3_A.time;
I2 = I2_A.data;
I2T = I2_A.time;
P = P_B2.data;
PT = P_B2.time;
Q = Q_B2.data;
QT = Q_B2.time;
% voltages
figure
plot(V2T, abs(V2),'-b'), title('Bus 2 Voltage'), xlabel('Time'),
ylabel('PU'), grid
% axis([min(V2T) max(V2T) 0 1.5 ])
hold on
plot(V2_A.time, abs(V2_A.data),'-r'), title('Bus 2 Voltage'),
xlabel('Time'), ylabel('PU'), grid
% axis([min(V2T) max(V2T) 0 1.5 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% current
figure
plot(I2T, abs(I2),'-b'), title('Bus 2 Current'), xlabel('Time'),
ylabel('PU'), grid
% axis([min(V2T) max(V2T) 0 8 ])
hold on
plot(I2_A.time, abs(I2_A.data),'-r'), title('Bus 2 Current'),
xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Real Power
figure
plot(PT, P,'-b'), title('Bus 2 Real power'), xlabel('Time'),
ylabel('MW'), grid
% axis([min(PT) max(PT) 0 800 ])
hold on
plot(P_B2.time, P_B2.data,'-r'), title('Bus 2 Real power'),
xlabel('Time'), ylabel('MW'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid

53
% Reactive Power
figure
plot(QT, Q,'-b'), title('Bus 2 Reactive power'), xlabel('Time'),
ylabel('MVAR'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(Q_B2.time, Q_B2.data,'-r'), title('Bus 2 Reactive power'),
xlabel('Time'), ylabel('MVAR'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Ref & Injected voltage
figure
plot(Vqref_pu.time, Vqref_pu.data,'-b'), title('Control Reference
Voltage Vqref'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(Vqinj_pu.time, Vqinj_pu.data,'-r'), title('SSSC Injected
Voltage Vqinj'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('Vqref','Vqinj','Location','NorthEast'); grid
%Case 1C
V1 = V1_A.data;
V1T = V1_A.time;
V2 = V2_A.data;
V2T = V2_A.time;
V3 = V3_A.data;
V3T = V3_A.time;
I2 = I2_A.data;
I2T = I2_A.time;
P = P_B2.data;
PT = P_B2.time;
Q = Q_B2.data;
QT = Q_B2.time;
% voltages
figure
plot(V2T, abs(V2),'-b'), title('Bus 2 Voltage'), xlabel('Time'),
ylabel('PU'), grid
% axis([min(V2T) max(V2T) 0 1.5 ])
hold on
plot(V2_A.time, abs(V2_A.data),'-r'), title('Bus 2 Voltage'),
xlabel('Time'), ylabel('PU'), grid
% axis([min(V2T) max(V2T) 0 1.5 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
54
% current
figure
plot(I2T, abs(I2),'-b'), title('Bus 2 Current'), xlabel('Time'),
ylabel('PU'), grid
% axis([min(V2T) max(V2T) 0 8 ])
hold on
plot(I2_A.time, abs(I2_A.data),'-r'), title('Bus 2 Current'),
xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Real Power
figure
plot(PT, P,'-b'), title('Bus 2 Real power'), xlabel('Time'),
ylabel('MW'), grid
% axis([min(PT) max(PT) 0 800 ])
hold on
plot(P_B2.time, P_B2.data,'-r'), title('Bus 2 Real power'),
xlabel('Time'), ylabel('MW'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Reactive Power
figure
plot(QT, Q,'-b'), title('Bus 2 Reactive power'), xlabel('Time'),
ylabel('MVAR'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(Q_B2.time, Q_B2.data,'-r'), title('Bus 2 Reactive power'),
xlabel('Time'), ylabel('MVAR'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Ref & Injected voltage
figure
plot(Vqref_pu.time, Vqref_pu.data,'-b'), title('Control Reference
Voltage Vqref'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(Vqinj_pu.time, Vqinj_pu.data,'-r'), title('SSSC Injected
Voltage Vqinj'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('Vqref','Vqinj','Location','NorthEast'); grid
55
%Case 2
P = P_B2.data;
PT = P_B2.time;
% Real Power
figure
plot(PT, P,'-b'), title('Bus 2 Real power'), xlabel('Time'),
ylabel('MW'), grid
% axis([min(PT) max(PT) 0 800 ])
hold on
plot(P_B2.time, P_B2.data,'-r'), title('Bus 2 Real power'),
xlabel('Time'), ylabel('MW'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Ref & Injected voltage
figure
plot(Vqref_pu.time, Vqref_pu.data,'-b'), title('Control Reference
Voltage Vqref'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(Vqinj_pu.time, Vqinj_pu.data,'-r'), title('SSSC Injected
Voltage Vqinj'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('Vqref','Vqinj','Location','NorthEast'); grid
%Case 2 Fitness function
function F = Fcn2(X)
global T1n T1d K
T1n = X(1); T1d = X(2); K = X(3);
sim('SSSC_2',5);
f = @(t) sum(abs((W.data)));
F = integral (f, 0, max(W.time),'ARRAYVALUED', true);
end

56
%Case 3A
dW = W.data;
WT = W.time;
%dw
figure
plot(WT, dW,'-b'), title('Control Reference Voltage Vqref'),
xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(W.time, W.data,'-r'), title('dw1 - dw2'), xlabel('Time'),
ylabel('rad/sec'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Ref & Injected voltage
figure
plot(Vqref_pu.time, Vqref_pu.data,'-b'), title('Control Reference
Voltage Vqref'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(Vqinj_pu.time, Vqinj_pu.data,'-r'), title('SSSC Injected
Voltage Vqinj'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('Vqref','Vqinj','Location','NorthEast'); grid
%Case 3A Fitness function
function F = Fcn3A(X)
global T1n T1d T2n T2d K
%T1n = X(1); T1d = X(2);
T1n = X(1); T1d = X(2); T2n = X(3); T2d = X(4); K = X(5);
sim('SSSC_3A',8);
f = @(t) sum(abs(W.data))*t;
F = integral (f, 0, max(W.time),'ARRAYVALUED', true);
end

57
%Case 3B
P = P_B2.data;
PT = P_B2.time;
dW = W.data;
WT = W.time;
% Real Power
figure
plot(PT, P,'-b'), title('Bus 2 Real power'), xlabel('Time'),
ylabel('MW'), grid
% axis([min(PT) max(PT) 0 800 ])
hold on
plot(P_B2.time, P_B2.data,'-r'), title('Bus 2 Real power'),
xlabel('Time'), ylabel('MW'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
%dw
figure
plot(WT, dW,'-b'), title('Control Reference Voltage Vqref'),
xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(W.time, W.data,'-r'), title('dw1 - dw2'), xlabel('Time'),
ylabel('rad/sec'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('No SSSC','SSSC','Location','NorthEast'); grid
% Ref & Injected voltage
figure
plot(Vqref_pu.time, Vqref_pu.data,'-b'), title('Control Reference
Voltage Vqref'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P1.time) max(P1.time) min(Q1.data)-20 max(P1.data)+20 ])
hold on
plot(Vqinj_pu.time, Vqinj_pu.data,'-r'), title('SSSC Injected
Voltage Vqinj'), xlabel('Time'), ylabel('PU'), grid
%axis([min(P2.time) max(P2.time) min(Q2.data)-20 max(P2.data)+20 ])
hleg = legend('Vqref','Vqinj','Location','NorthEast'); grid
58
%Case3B Fitness function
function F = Fcn3B(X)
global T1 T2 T3 T4 T1n T1d T2n T2d K
T1 = X(1); T2 = X(2); T3 = X(3); T4 = X(4);
T1n = X(5); T1d = X(6); T2n = X(7); T2d = X(8); K = X(9);
sim('SSSC_3B',8);
f1 = @(t) sum(abs(P_B2.data))*t;
F1 = integral (f1, 0, max(P_B2.time),'ARRAYVALUED', true);
f2 = @(t) sum(abs(W.data))*t;
F2 = integral (f2, 0, max(P_B2.time),'ARRAYVALUED', true);
F = F1 + F2;
end
%helpful codes for calculation
figure, compass(V1_A.data(end)), figure, compass(V3_A.data(end)),
theta = (angle(V1_A.data(end)) - angle(V3_A.data(end)))*180/pi
abs(V1_A.data(end)), abs(V3_A.data(end))
drop13 = abs((V1_A.data(end) - V3_A.data(end))/(I2_A.data(end)))
po =
abs(V3_A.data(end))*abs(V1_A.data(end))*sin(angle(V1_A.data(end)) -
angle(V3_A.data(end)))/abs(drop13)
59
%figure 4 graph
V1 = 1;
V2 = 1;
XL = 1;
s = [0:180/1000:180];
Vq = [0.707 0.353 0 -0.353 -0.707];
for i = 1:5;
p(i,:) = (V1*V2/XL).*sin(s*pi/180) + Vq(i).*(V1/XL).*cos(s*pi/360);
end
plot(s, p(1,:),s, p(2,:),s, p(3,:),s, p(4,:),s, p(5,:)),
ylabel('Transfered Power in PU'), xlabel('Power angle in PU'),
title ('Transmitted Power versus Injected Voltage'), grid