automatizaciÓn prÁctica iii - elai.upm.es · control distribuido a través de profibus 1 master...
TRANSCRIPT

Control distribuido a través de Profibus 1
MASTER OFICIAL EN INGENIERÍA
ELECTROMECÁNICA
AUTOMATIZACIÓN PRÁCTICA III
Universidad Politécnica de Madrid ‐UPM
Control distribuido a través de Profibus 2
Universidad Politécnica de Madrid ‐UPM
2.2. CONTROL DISTRIBUIDO A TRAVÉS DE LA RED INDUSTRIAL PROFIBUS
2.1. INTRODUCCIÓN
Profibus nace como bus de campo abierto para que diferentes fabricantes pudieran conectar en una misma red dispositivos variados de automatización. Sus creadores fueron un colectivo de universidades y empresas en la década de los 80, proyecto que derivó en los estándares EN 50170 e IEC 61158. Actualmente Profibus es uno de los buses de mayor implantación en el mundo.
Profibus cumple el estándar ISO/OSI (International Standard Organization / Open System Interconnect). Existen tres perfiles distintos de Profibus:
• Profibus FMS (Fieldbus Message Specification): Implementa, entre otras, la capa de aplicación del modelo OSI (capa 7) y se aplica para transferencia de gran volumen de datos entre dispositivos inteligentes. Basado en una arquitectura cliente‐servidor, actualmente se está viendo relegado por Ethernet Industrial y TCP/IP.
• Profibus DP (Distributed Peripherial): Pensado para intercambio a gran velocidad de un volumen medio de datos entre un controlador (que hace las veces de maestro) y diferentes periféricos como PLCs, módulos E/S, paneles HMI, variadores de frecuencia etc., que actúan como esclavos. Éstos se encuentran distribuidos en planta y conectados a una única red. DP especifica las capas física y de enlace del modelo OSI (capas 1 y 2), bajo la especificación de la norma física RS‐485.

Control distribuido a través de Profibus 3
• Profibus PA (Process automation): Es un Profibus DP orientado a trabajar en el ámbito de control de procesos, es decir, en zonas denominadas "Ex" de seguridad. El perfil sigue la norma IEC 1158‐2.
La figura siguiente muestra esquematiza los diferentes tipos de Profibus.
En el laboratorio se dispone de 8 PLCs conectados mediante Profibus DP en dos columnas de a 4, cada columna una red independiente. La práctica consistirá en configurar el bus para permitir que un PLC maestro a nivel de campo gobierne el comportamiento de otro/s PLC/s esclavo/s donde corre el programa de control (potencialmente conectados con actuadores/sensores con un bus AS‐i, por ejemplo).
2.2. PROTOCOLO PROFIBUS DP. ARQUITECTURA MAESTRO‐ESCLAVO
A pesar de que Profibus FMS puede verse como un protocolo más potente, no es el perfil más adecuado para trabajar a nivel de campo, ya que, en este nivel, el volumen de datos a enviar en cada transmisión no es demasiado elevado pero se requiere que vaya a gran velocidad y, sobre todo, se tienen requisitos de tiempo real. Prima, frente a la rapidez, que el mensaje llegue en un tiempo máximo límite acotado a priori. En el caso del nivel de campo este tiempo suele estar en torno a 10ms.
El conexionado de los diferentes dispositivos a la red se basa en la arquitectura maestro‐esclavo: existe un potente controlador maestro y hasta 126 dispositivos esclavos conectados en una misma red. Los dispositivos maestros son estaciones inteligentes activas que gestionan las comunicaciones y van preguntando a los diferentes esclavos en un orden predeterminado. Éstos últimos suelen ser estaciones
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 4
pasivas (e.g. módulos E/S) que esperan ser interrogados por el maestro. Una unidad esclavo no tiene, por sí misma, capacidad para establecer comunicación con otro elemento de la red.
La siguiente figura clarifica este punto.
Elementos que participan en una red Profibus:
• Maestros: PLCs S7‐400, S7‐300, ordenadores con puerto DP para monitorizar (e.g. sistemas SCADA), etc.
• Esclavos inteligentes: PLCs S7‐300 y S7‐200 con puerto DP, convertidores de frecuencia, servocontroladores etc.
• Esclavos pasivos: ET 200L/M/S (a disposición en el laboratorio)
• Cables y conectores
2.3. OBJETIVOS DE LA PRÁCTICA
En el laboratorio se dispone de CPUs S7‐300 con un puerto Profibus DP no integrado que requiere de un procesador de comunicaciones CP 342‐5 con funcionalidad de comunicación DP en cada PLC. En este caso, para establecer comunicación entre dos PLCs es necesario añadir el procesador de comunicaciones en el proyecto HW indicando la función (maestro o esclavo) que va a realizar.
El intercambio de datos se produce entre la unidad CP 342‐5 y el PLC del mismo bastidor donde se encuentra a través de un buffer de entradas y otro de salidas que puede ser un área de memoria de Entradas, Salidas, Marcas o Bloque de Datos. A su vez, la CP intercambia datos con el resto de dispositivos conectados a la red accediendo a sus respectivos bufferes. La lectura y escritura sobre estos buffers se gestionan mediante los servicios siguientes de la librería SIMATIC_NET_CP:
• DP_SEND (FC1): la CPU escribe en el buffer de salidas de su CP
• DP_RECV (FC2): la CPU lee del buffer de entradas de su CP
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 5
En el caso de que el PLC maestro ejecute ambos servicios, DP_SEND envía el contenido del buffer de salidas al buffer de entradas de los esclavos conectados a la red y DP_RECV recibe en el buffer de entrada la información que los esclavos tienen en sus buffers de salida correspondientes.
Como en otras ocasiones la configuración del proyecto se hace a través del bus MPI. Para ello, es necesario definir un único proyecto HW con todos los dispositivos que se van a conectar a la red con su HW correspondiente. Posteriormente cada PLC se recibirá la configuración adecuada a través del bus MPI (i.e. maestro, esclavo1, esclavo 2 etc.). Cada PLC (mestro/esclavo) tiene un perfil HW en el proyecto, pero solo es necesario configurar el conexionado de la red en el PLC maestro.
OBJETIVOS
En el laboratorio actualmente se dispone de dos redes Profibus DP, cada una formada por 4PLCs situados en la misma columna. La práctica consistirá en:
• Definir para cada red un PLC maestro (el que se encuentra más cerca del profesor) y otros 2 cualesquiera como esclavos.
Además, para comprobar el correcto funcionamiento del sistema, será necesario que:
• Los PLCs, esclavos ejecuten el control de la máquina tránsfer lineal empleada en las prácticas 1 y 2.
• El PLC maestro arranque el control de la máquina transfer líneal en cada PLC esclavo y simule las condiciones iniciales para que el motor de la cinta se ponga en marcha.
Para ello se preveen una serie de tareas intermedias que hay que completar en el orden expuesto.
A continuación, cree un nuevo proyecto Profibus (VP:Archivo‐>Nuevo).
2.4. CONFIGURACIÓN DE UN PLC ESCLAVO
Abra el proyecto Profibus vacío creado en el apartado anterior. En esta sección se va a proceder a configurar el HW para uno de los posibles esclavos.
Como en prácticas anteriores, defina un objeto PLC SIMATIC 300. Para mayor legibilidad cambie el nombre por Esclavo_#3 (el 3 indica la dirección que se le va a asignar en la red Profibus). El resultado debería ser el que aparece en la figura.
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 6
TAREA 1
Configure el PLC correctamente (como en prácticas anteriores) para que coincida con el disponible en el laboratorio (CPU 313‐C, modelo 6ES7 313‐5BE01‐0AB0, en el slot 2 del bastidor).
A continuación hay que añadir la unidad de comunicaciones CP 242‐5 con referencia 6GK7 342‐5DA02‐0XE0 en el slot 4. Se le asignará el identificador de dirección 3 en la red DP. Para introducir la unidad CP en el slot 4 arrastre el perfil del catálogo siguiente sobre dicho slot:
Seguidamente introduzca la dirección de red 3 en la ventana que aparece a continuación
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 7
De momento no se va a conectar a ninguna red (pulsando el botón "Nueva" de la ventana) y pulsamos a Aceptar. Haga ahora doble‐click con el ratón sobre la CP recién creada. Aparecerá la ventana de información siguiente:
Seleccione la pestaña direcciones para ver el mapa de memoria asociado a los buffers de entrada salida. Aparecerá la pantalla siguiente:
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 8
Los buffers de entrada/salida ocupan en este caso 16 bytes del mapa de memoria de la imagen de Entradas/Salidas de la CPU. Este direccionamiento se empleará en el programa que gestiona el intercambio de datos local entre las CPU y la CP del mismo bastidor.
Seleccione ahora la pestaña Modo de operación y active la opción de funcionamiento como esclavo para esta configuración (aparecerá una ventana advirtiendo de la necesidad del uso de las funciones FC1 y FC2 para las comunicaciones y FC3 y FC4 para el diagnóstico y control). Pulse aceptar, guarde y compile la configuración.
Esta configuración ya se podría cargar en uno de los PLCs esclavos. De
momento, aplazaremos esta decisión.
2.5. CONFIGURACIÓN DEL PLC MAESTRO
Abra el proyecto anterior y añada un nuevo HW, S7‐300, esta vez para el maestro. Como antes, cambie el nombre a Maestro_#2 para evitar confusiones (se le asignará la dirección 2 en la red DP). Configure el HW del PLC maestro de la misma forma que en el caso del esclavo, pero ahora, al añadir la unidad de comunicaciones CP‐342‐5 vamos a configurar la red:
Universidad Politécnica de Madrid ‐UPM
Control distribuido a través de Profibus 9
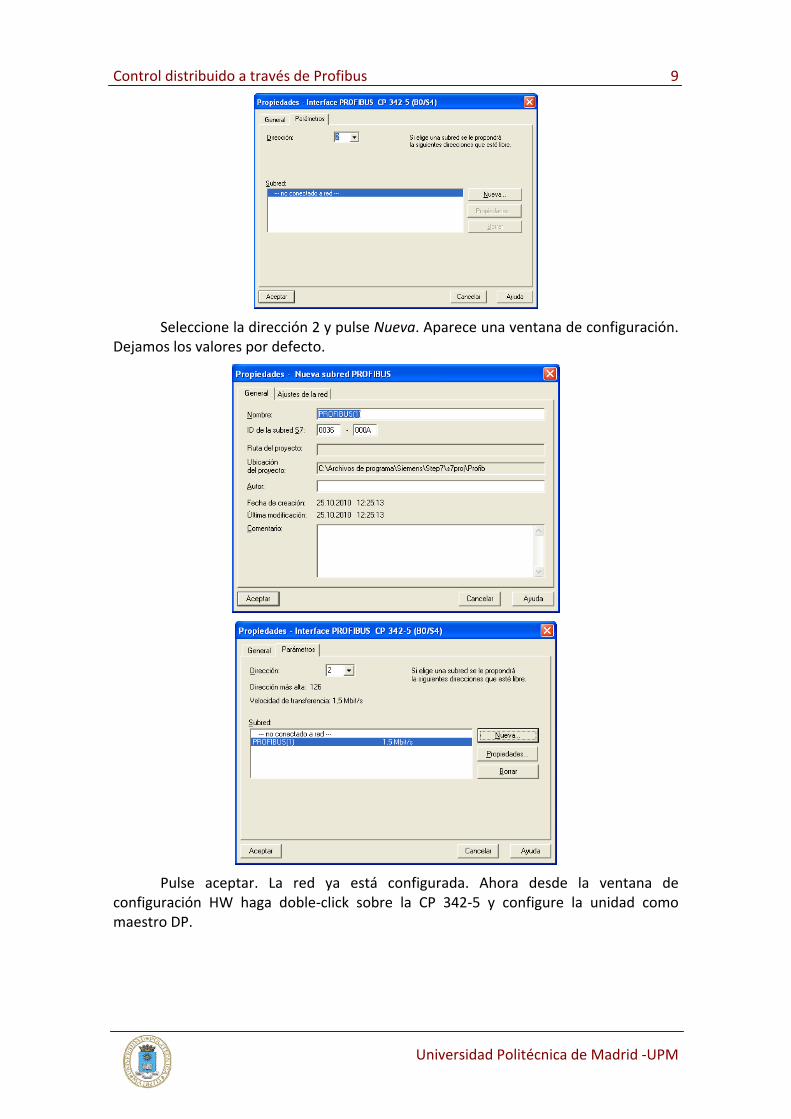
Seleccione la dirección 2 y pulse Nueva. Aparece una ventana de configuración.
Dejamos los valores por defecto.
Pulse aceptar. La red ya está configurada. Ahora desde la ventana de
configuración HW haga doble‐click sobre la CP 342‐5 y configure la unidad como maestro DP.
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 10
Si todo se ha realizado correctamente al finalizar este proceso aparecerá una
barra que nace de la unidad CP en la parte superior de la ventana, como ésta:
Esta barra representa el bus de comunicaciones y está asociado únicamente al maestro de la red. Ahora se pueden "colgar" el resto de periféricos sobre este bus, con lo que se le dice al PLC maestro los diferentes dispositivos que están conectados con él. Guarde la configuración del maestro.
2.6. CONFIGURACIÓN DE LA RED
Una vez finalizada la configuración del PLC maestro (HW del PLC y configuración del Profibus) se añaden los diferentes periféricos a dicha red, en nuestro caso el esclavo (Esclavo_#3) ya configurado en el mismo proyecto.
Para ello, abrá la ventana de configuración HW del maestro y selección en el catálogo a la derecha el perfil de estaciones ya configuradas para Profibus‐DP que aparece en la figura:
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 11
Es importante comprobar que el perfil de la unidad de comunicación es el
correcto. Se arrastra entonces el icono hasta la línea que representa la conexión Profibus. Si todo es correcto aparecerá una ventana de acoplamiento para el esclavo definido en el proyecto como esta:
Acepte el acoplamiento. Ahora falta definir la cantidad de información enviada
y recibida entre el maestro y cada esclavo. Para ello la manera más simple es usar los módulos universales que vienen en el catálogo y después configurarlos.
Seleccione el icono V5.0 anterior del catálogo y aparecerá un desplegable como éste:
Universidad Politécnica de Madrid ‐UPM
Control distribuido a través de Profibus 12
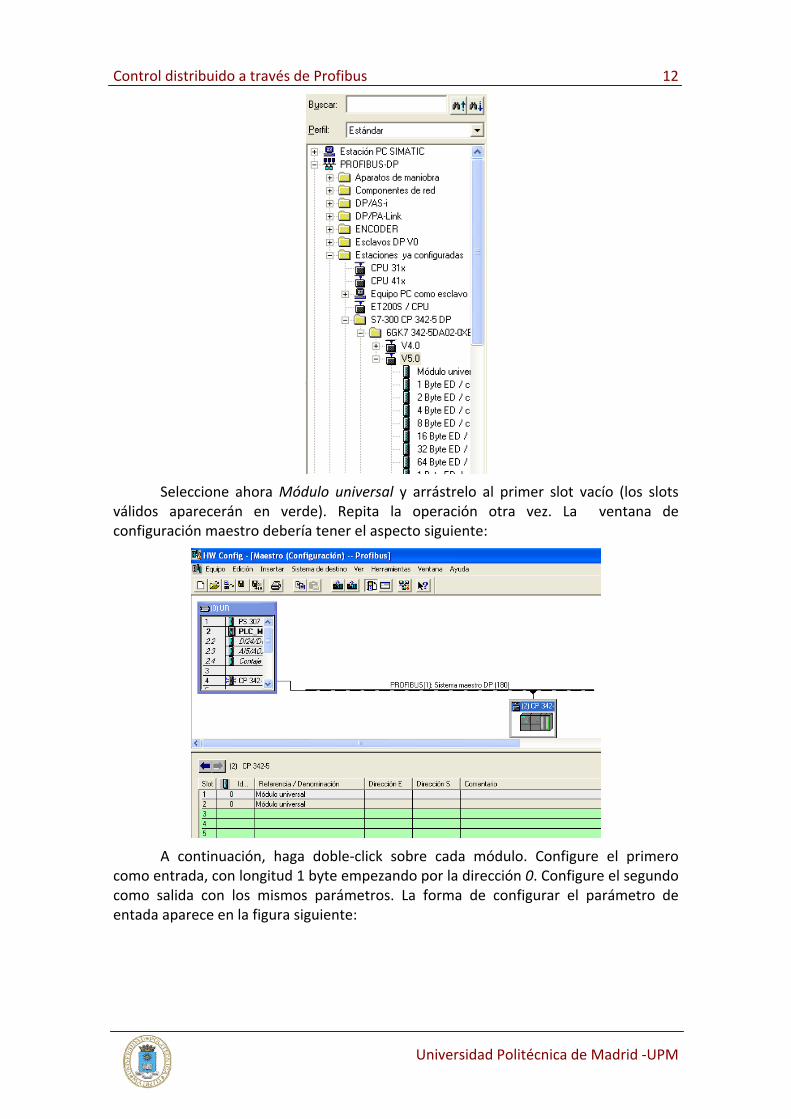
Seleccione ahora Módulo universal y arrástrelo al primer slot vacío (los slots
válidos aparecerán en verde). Repita la operación otra vez. La ventana de configuración maestro debería tener el aspecto siguiente:
A continuación, haga doble‐click sobre cada módulo. Configure el primero
como entrada, con longitud 1 byte empezando por la dirección 0. Configure el segundo como salida con los mismos parámetros. La forma de configurar el parámetro de entada aparece en la figura siguiente:
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 13
Con esto lo que estamos diciendo es que el CP maestro va a intercambiar un
byte de información con el CP esclavo. El buffer de entrada sería para recibir datos y el de salida para enviarlos. Guarde y compile la configuración de la red (VC:Equipo‐‐>Guardar y compilar).
2.7. PROGRAMA DE LECTURA Y ESCRITURA
Terminada la configuración de la red es necesario escribir el código que permita el intercambio de datos. Esto se hace con las funciones de la librería SIMATIC‐NET‐CP FC1(enviar) y FC2(recibir). Cuando el maestro envía datos está copiando el área de memoria prevista en los parámetros de la función FC1 al buffer de entrada del esclavo correspondiente. Cuando el maestro ejecuta la función FC2 está recibiendo la información del buffer de salida del esclavo en el área de memoria pasada como parámetro.
En el ejemplo, ya se ha configurado la comunicación maestro‐esclavo de tamaño byte tanto para enviar como recibir. Vuelva a la ventana principal, edite el bloque OB1 relativo al maestro e introduzca el siguiente segmento:
DP_SEND es el nombre simbólico de la función FC1. El parámetro CPLADDR
lleva la dirección inicial del área de memoria de la CPU (buffer de salida local) que
Universidad Politécnica de Madrid ‐UPM
Control distribuido a través de Profibus 14
estaba prevista en la configuración (dirección 256, 100 en hexadecimal). El parámetro SEND es de tipo ANY y permite añadir el área de memoria prevista como buffer de salida local de la CP, en este caso el byte de memoria EB 124. En cada ciclo de comunicación maestro‐escavo, la CP enviará el contenido de este byte del maestro al esclavo Esclavo_#3. El resto de parámetros son parámetros de control y verificación que hay que completar.
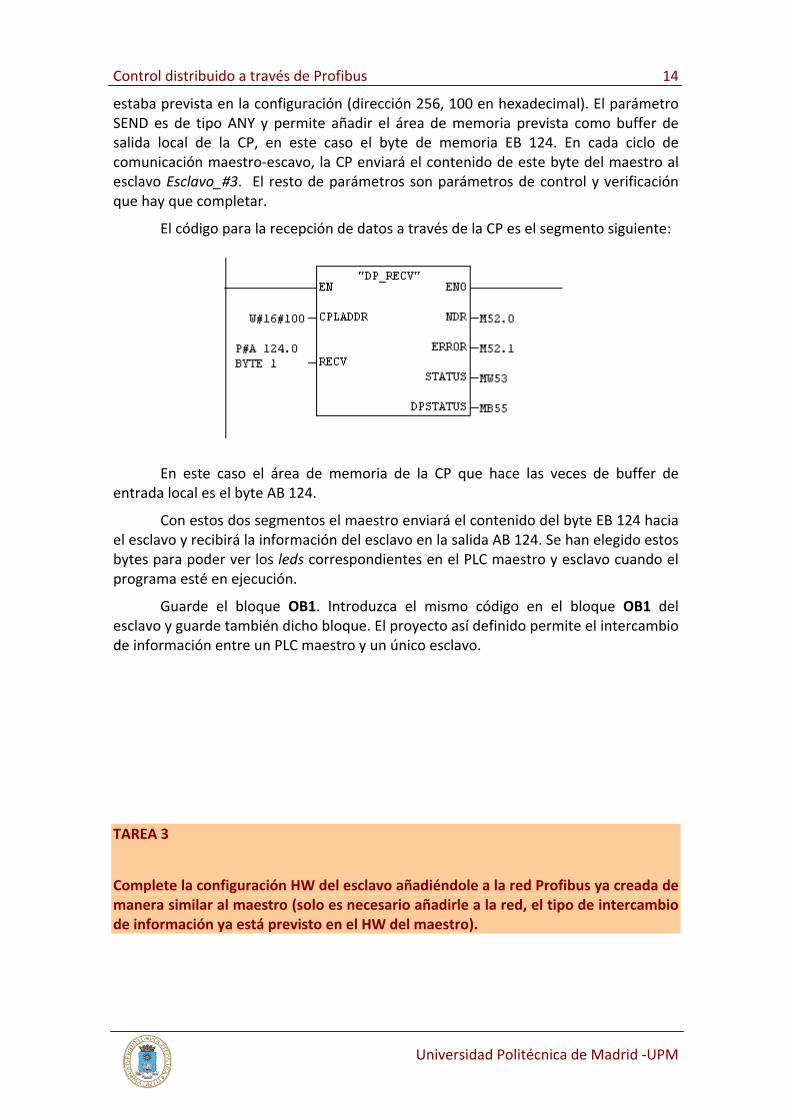
El código para la recepción de datos a través de la CP es el segmento siguiente:
En este caso el área de memoria de la CP que hace las veces de buffer de
entrada local es el byte AB 124.
Con estos dos segmentos el maestro enviará el contenido del byte EB 124 hacia el esclavo y recibirá la información del esclavo en la salida AB 124. Se han elegido estos bytes para poder ver los leds correspondientes en el PLC maestro y esclavo cuando el programa esté en ejecución.
Guarde el bloque OB1. Introduzca el mismo código en el bloque OB1 del esclavo y guarde también dicho bloque. El proyecto así definido permite el intercambio de información entre un PLC maestro y un único esclavo.
TAREA 3
Complete la configuración HW del esclavo añadiéndole a la red Profibus ya creada de manera similar al maestro (solo es necesario añadirle a la red, el tipo de intercambio de información ya está previsto en el HW del maestro).
Universidad Politécnica de Madrid ‐UPM

Control distribuido a través de Profibus 15
Universidad Politécnica de Madrid ‐UPM
TAREA 4
Consiga que un PLC funcione como maestro y otro como esclavo de los que están situados en red en el laboratorio de prácticas. Para ello abra el proyecto creado en el Simatic Manager de los PCs conectados mediante MPI con los 2 PLCs que se vayan a utilizar. En el maestro cargue solo el proyecto Maestro_#2 y en el esclavo solo el Esclavo_#3. Ponga ambas CPs y PLCs en modo RUN. Envíe datos entre ambos.
TAREA 5
Ejecute el control de la máquina tránsfer lineal en el PLC esclavo. Consiga que el PLC maestro envíe la señal de arranque del control y las condiciones iniciales adecuadas para que se ponga en marcha la cinta que transporta las botellas.
TAREA 6
Añada un esclavo adicional (Esclavo_#4) a la red y consiga que el maestro se comunique con ambos a la vez a través de la red Profibus (en ambos casos se intercambiará un byte de información).