automatic scene rendering for unmanned aerial systems
TRANSCRIPT
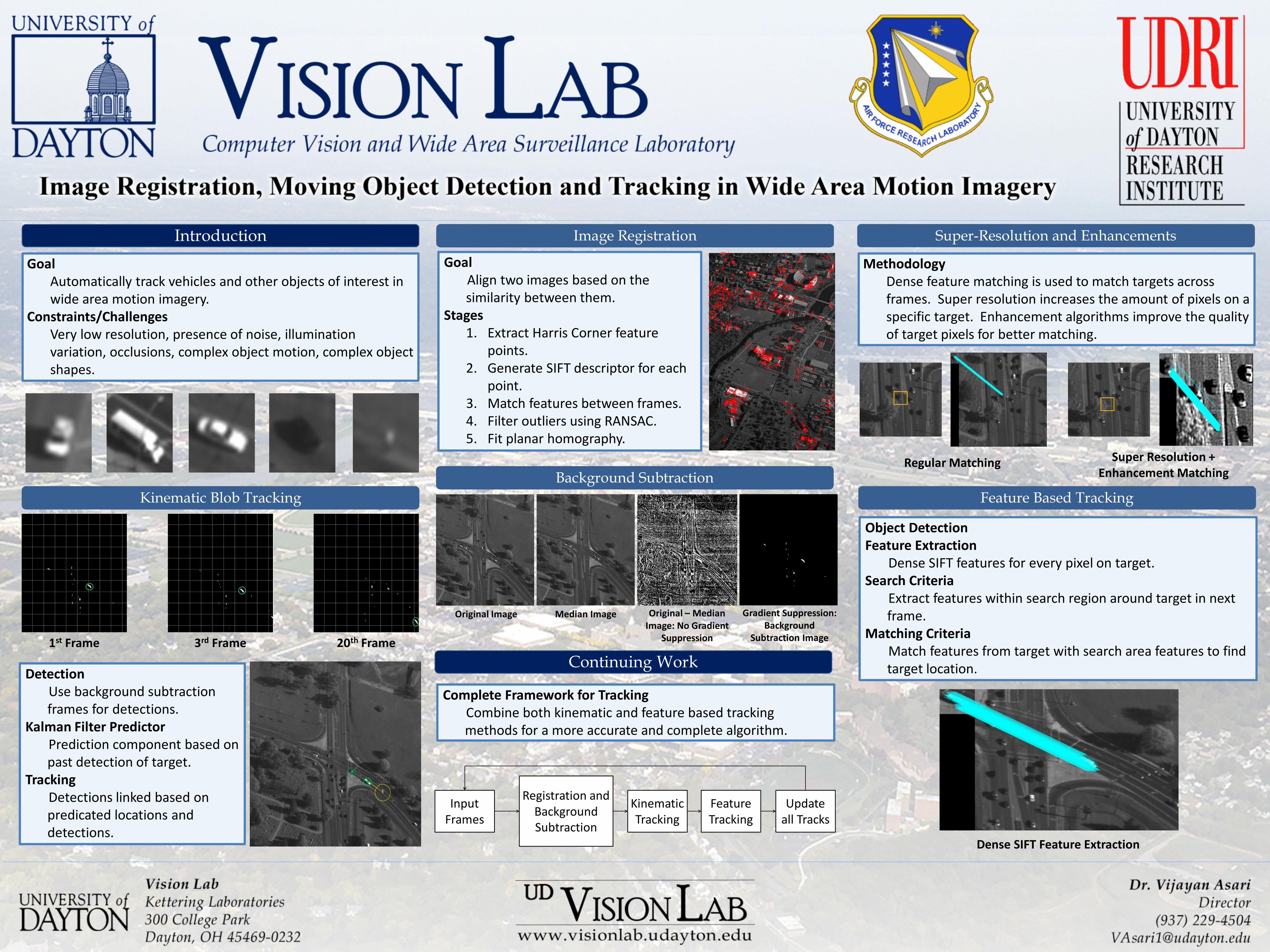
Feature Based Tracking
Introduction
Continuing Work
Goal
Automatically track vehicles and other objects of interest in
wide area motion imagery.
Constraints/Challenges
Very low resolution, presence of noise, illumination
variation, occlusions, complex object motion, complex object
shapes.
Methodology
Dense feature matching is used to match targets across
frames. Super resolution increases the amount of pixels on a
specific target. Enhancement algorithms improve the quality
of target pixels for better matching.
Background Subtraction
Super-Resolution and Enhancements
Complete Framework for Tracking
Combine both kinematic and feature based tracking
methods for a more accurate and complete algorithm.
Image Registration
Goal
Align two images based on the
similarity between them.
Stages
1. Extract Harris Corner feature
points.
2. Generate SIFT descriptor for each
point.
3. Match features between frames.
4. Filter outliers using RANSAC.
5. Fit planar homography.
Kinematic Blob Tracking
Object Detection
Feature Extraction
Dense SIFT features for every pixel on target.
Search Criteria
Extract features within search region around target in next
frame.
Matching Criteria
Match features from target with search area features to find
target location.Detection
Use background subtraction
frames for detections.
Kalman Filter Predictor
Prediction component based on
past detection of target.
Tracking
Detections linked based on
predicated locations and
detections.
1st Frame 3rd Frame 20th Frame
Original Image Median Image Original – Median
Image: No Gradient
Suppression
Gradient Suppression:
Background
Subtraction Image
Input
Frames
Kinematic
Tracking
Feature
Tracking
Update
all Tracks
Registration and
Background
Subtraction
Regular Matching Super Resolution +
Enhancement Matching
Dense SIFT Feature Extraction