assault breaching technologies update
DESCRIPTION
Assault Breaching Technologies Update. MINWARA Spring 2011 Regional Conference. Mr. Brian Almquist Ocean Engineering & Marine Systems Office of Naval Research [email protected] (703) 696-3351 . DISTRIBUTION STATEMENT A: Approved for public release; distribution unlimited. - PowerPoint PPT PresentationTRANSCRIPT

Mr. Brian AlmquistOcean Engineering & Marine Systems
Office of Naval [email protected]
(703) 696-3351
MINWARASpring 2011
Regional Conference
DISTRIBUTION STATEMENT A: Approved for public release; distribution unlimited.

2011 MINWARA
2
Enabling Capability: MCM for Maneuver
Assure Access to Enable OMFTS/STOM

2011 MINWARA
3
Ship-To-Objective Maneuver
– Wide area surveillance to enable maneuver– Clandestine reconnaissance to prepare the battlespace– Rapid overt mine and obstacle reconnaissance– Data Fusion to accelerate the planning process – Timely MCM common tactical picture to enable maneuver– Stand-off breaching of mines and obstacles in BZ/SZ– Stand-off neutralization of individual mines in VSW– Autonomous, high speed compact influence sweep– Precision localization and navigation from VSW to BEZ– Rapid Follow On Clearance
• Capabilities:

2011 MINWARA
4
Mine and Obstacle Breaching S&T Strategy
Spiral Development Approach• JDAM Assault Breaching System (JABS): Precision guided
bombs for surface laid BZ/SZ mines and obstacles• Advanced Warhead Development: Countermine darts with
greater kill radius & effectiveness against buried BZ/SZ mines• JDAM Assault Breaching System (JABS): Extend BZ/SZ
capability to neutralization of VSW Mines
Develop a Precision Breaching Capability• Key enablers include ISR, Weapon Precision Guidance, and
Precision Navigation• Delivery by Naval TACAIR, USAF Bombers

2011 MINWARA
5
MK-84
Standoff Delivery Platform GBU-31(V)2/BJDAM Tail Kit
JABSBeach Zone / Surf Zone
Surface Laid Mines and Obstacles
Dispenser
CM Darts
MODSBeach Zone / Surf Zone
Surface Laid & Buried Mines
Mine & Obstacle Breaching Systems Transitioned to PMS-495

2011 MINWARA
6
JABS in the VSW
40’15’
25’
10 msec
25 msec
Objective• Extend Breaching Capability
Previously Demonstrated in the BZ/SZ to the VSW
Effectiveness Issues• Weapon Stability in VSW• Time of Weapon Detonation• Lethality against VSW Mines
Moored / Bottom Targets
Standoff Delivery

2011 MINWARA
7
JABS in VSW
• Underwater Trajectory– Inert Weapons– Underwater Video– Alignment of Impact Points
All Targets Were Neutralized
• Lethality– Live Weapons– Moored and Bottom Mines

2011 MINWARA
8
• JDAM Assault Breaching System (JABS) for BZ/SZ–Transitioned on 28 Feb 05
–Fielded via DOTMLPF CR*: Signed by JROC on 1 May 06• Mine and Obstacle Defeat System (MODS)
–Transitioned on 30 Mar 07
–Successful Program of Record: Countermine System (CMS)
• JDAM Assault Breaching System (JABS) for VSW–Updated Mission Planner
–Transitioned on 19 Oct 10
Status
* Doctrine, Organization, Training, Materiel, Leadership and Education, Personnel and Facilities Change Recommendation

2011 MINWARA
9
Spiral Development of COBRA*
• Block II (IOC / FY15)– Night Operations– Detection in Surf Zone
• Block III (IOC / FY18)– Buried Mines
• Block I (IOC / FY11)– Daytime Operations– Surface Mines– Obstacles– Detection in BZ
* Coastal Battlefield Reconnaissance and Analysis
2011 MINWARA
10
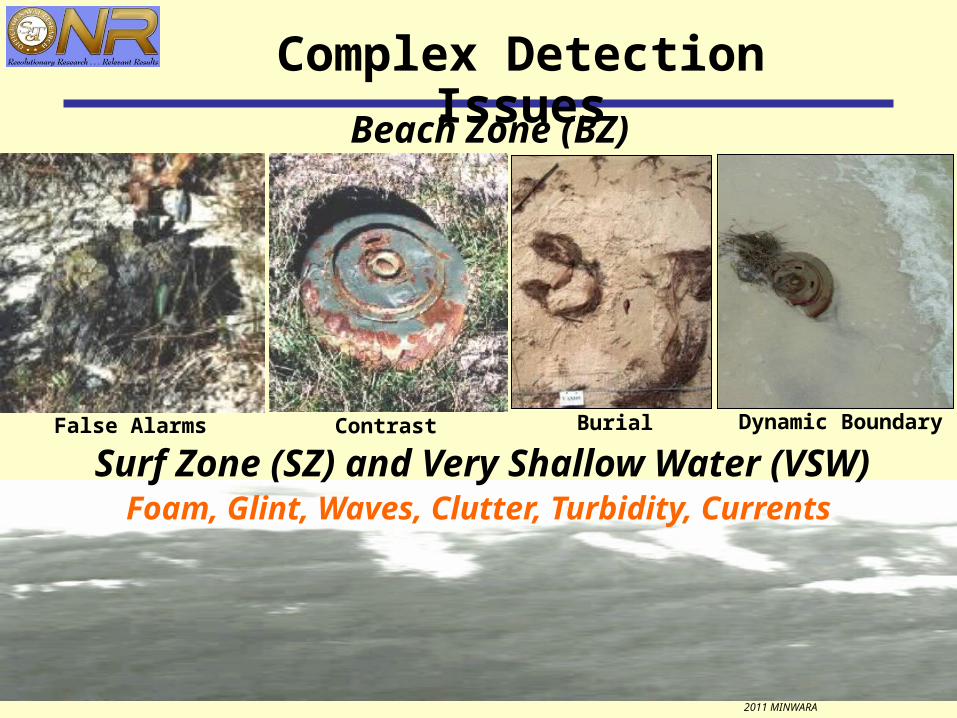
Foam, Glint, Waves, Clutter, Turbidity, Currents
Complex Detection Issues
False Alarms Contrast Burial Dynamic Boundary
Beach Zone (BZ)
Surf Zone (SZ) and Very Shallow Water (VSW)

2011 MINWARA
11
BZ Multispectral
SZ/VSWMonochrome
• COBRA Block II – Night Operations– Detection in Surf Zone
• Active Multi-spectral– Day/Night Operations– BZ/SZ
• Optimized for Surf Zone• True 3-D LIDAR System• Multi-look Scan Pattern
for Operations in High-Clutter SZ Environment
• Compact for TUAV
Rapid, Overt, Airborne, Reconnaissance (ROAR)

2011 MINWARA
12
3
-D
Cam
era
Provides Superior Performance for UAV
Applications
ROAR is True 3-D LIDAR
Data Cube
SingleVoxel
Flying Spot
Range-GatedCamera
STIL
3D Camera

2011 MINWARA
13
ROAR Flight Test 3-D Camera Data
Rotated Image of Object
Object
Object Below Water Line
Water Line
Water Line
Depth Slices (6 of 44)
3-D Flash LIDAR Supports Development of Real-Time Target Recognition Algorithms
Water SurfacePoint Cloud
Intensity

2011 MINWARA
14
ROAR Flight Test
ROAR System
Eglin Test Site
ROAR System Integrated on Helicopter
Demonstrated Day/Night Automated Detections in the BZ / SZ

2011 MINWARA
15
• Program Description– Active and Passive Imagers– Laser Interferometric Sensor
• Objective – COBRA Block III Performance Objectives– Buried Mine Field Detection– Beach Zone (BZ)
• System Issues – Soil and Target Interaction– Soil Moisture and Water Coverage– Uniqueness of Target Signature – False Alarms
Complete Burial
Dynamic Boundary
Tactical UAV Sensors for Detection of Buried Minefields in the BZ

2011 MINWARA
16Burial Depth
• Offers potential to detect buried targets in wet and dry sand environment
• System combines an acoustic source to excite the target and the surrounding area with a laser-based electro-optic imaging technique
• Measures the differences in the mechanical response of the ground directly above a buried target with that of the surrounding area.
Laser Interferometric Sensor
Acoustic Source
Laser-Based Electro-Optic Imager

2011 MINWARA
17
Laser Interferometric SensorStatic Tests
• Natural Environment • Acoustic Source on the Ground• Detected Buried Mines• Clutter Yielded “No Signal” or a
Significantly Distorted Pattern• Consistent Results

2011 MINWARA
18
Acoustic Source
Detected Buried Anti-Tank Mines and IED-Type Targets
Sensor
Target Field
Laser Interferometric Sensor1st Flight Test

2011 MINWARA
19
Rapid Overt Airborne Reconnaissance (ROAR)• Transitioned Technology to PMS-495 (28 April 2011)
Laser Interferometric Sensor (LIS) • Preparations are Underway for a Second Flight Test
– Sensor & acoustic source will be onboard the helicopter
Status

2011 MINWARA
20
Description
• Update frequency of orbit and clock data• Accuracy of GPS Positions and Attitudes• Combined Navigation and Imagery Data
Objective• Demonstrate Precision Navigation for
MCM Assets Operating in the Littorals
Effectiveness Issues
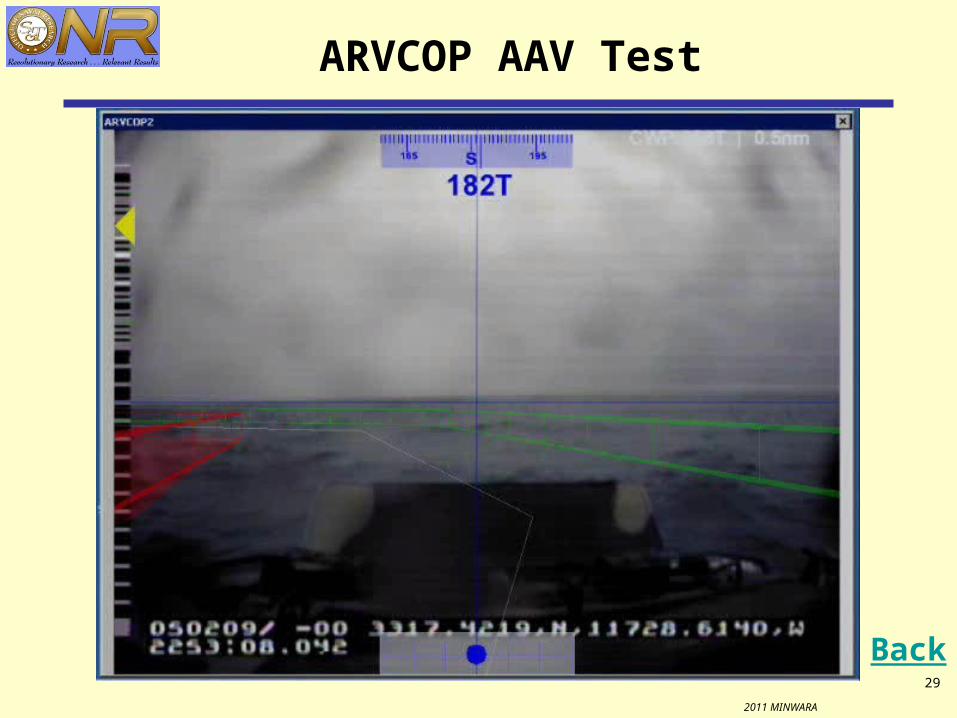
• Virtual Marking of Lanes / Obstacles– Augmented Reality Virtual Common
Operational Picture (ARVCOP)• Higher Accuracy GPS Positions
– MCM Precision GPS EphemerisDistribution System (MCM PGE DS)
GPSOC
Gateway TCS
MCM PGE DS
ARVCOPGPS
Precision Assault Navigation and Assault Lane Marking

2011 MINWARA
21
SIPRNET
GPSOC
MCM TCS
SIPRNET
Precision Navigation Reduces Amount of Ordnance Required to Breach Assault Lanes
EPLRS COM LINK
GPS
Worldwide AF & NGA
GPS Tracking
Sites
Fire Scout• Position Accuracy
1 meter RMS• Target Location Error (TLE)
2-3 meters RMS
AAV with ARVCOP• Cross Track Error (CTE)
4 m (mean), STDEV 2.9 m
MCM PGE Distribution System

2011 MINWARA
22
• ARVCOP– Transitioned on 7 Jun 10– PMS-495 awarded TSI a contract to install units on AAVs
• MCM PGE Distribution System– Working with PMS-495, Army and NGA* to implement onto BFT
node on the global communications network– NGA continuing development of compatible software that will
provide future accuracy enhancements
Status
* National Geospatial-Intelligence Agency

2011 MINWARA
23
Surface / Near-Surface Drifting and Oscillating Mines
BOTTOM
MOOREDMOORED
MOORED
BOTTOM BOTTOM
Stationary
Detection and Neutralization of Surface and Near-Surface Drifting/Oscillating Mines
Drifting Mines Change Locations Making Reacquisition Impossible

2011 MINWARA
24
• Synthetic Aperture Radar• Passive Electro-Optic (EO)• 3-D Flash LIDAR• Onboard Classification
• Wide-Area Detection, Classification, Localization• In-Situ Characterization of the Environment
• Real-time, Onboard Classification
Enables Concurrent Detection & Neutralization
Compact Modular Sensor / Processing Suite (CMSS)
Integrate
Integrate Coordinate

2011 MINWARA
25
• Oceanographic Models– Waves, Winds, Currents
• Drift Models– Models for Drift of Objects
• Remote Sensing Algorithms– Directional Wave Spectrum
Enable Real-Time Adaptable MCM Operations in Areas Threatened by Drifting Mines
Mine Drift Prediction TDA
Onboard Prediction of Mine Drift
Stand-Alone Software Service Compatible with MIW C2 (e.g. MEDAL-EA, EPMA and NSAM)
Predicted Surface Currents Tailored Tactical PictureMEDAL Bathymetry Database

2011 MINWARA
26
• Transitions Have Contributed to Closing Gap– Capacity/Capability to Clear Large Areas of Mines
• Transitions Completed Since Last Meeting Include:– ROAR– JABS (VSW)– ARVCOP– MCM PGE Distribution System (Pending)
• UAV-Deployed Sensor for Buried Mines – Ends in FY11– Significant Discovery for Standoff Detection – Other Organizations Interested in the Technology
• New FY12 FNC Program for Drifting / Oscillating Mines– Technology Transition Agreement (TTA) is in Staffing– ONR BAA Should be Published by 1 June 2011
Summary

Mr. Brian AlmquistOcean Engineering & Marine Systems
Office of Naval [email protected]
(703) 696-3351
MINWARASpring 2011
Regional Conference
DISTRIBUTION STATEMENT A: Approved for public release; distribution unlimited.

2011 MINWARA
28
Movies
2011 MINWARA
29
Back
ARVCOP AAV Test

2011 MINWARA
30
ROAR Flight Test
Back

2011 MINWARA
31
LIS Flight Test
Back
2011 MINWARA
32
JABS Flight Test
Back

2011 MINWARA
33
ROAR 3-D Water Tank
Back
2011 MINWARA
34
ROAR Underwater Target Detection
Back