aae 668 & ece 695 hybrid systems: theory and ...jianghai/teaching/ece695/...aae 668 & ece...
TRANSCRIPT

AAE 668 & ECE 695Hybrid Systems: Theory and Applications
Lecture 1: Introduction
Inseok Hwang and Jianghai Hu
Time: TTh 10:30-11:45amLocation: ARMS 3115
Office hour: Tu 9:30-10:30am (Hwang), Tu 3-4pm (Hu)Email: {ihwang,jianghai}@purdue.edu
August 22, 2016
1 / 13

References
Books:
• Hybrid Systems: Foundations, Advanced Topics and Applications,J. Lygeros, S. Sastry and C. Tomlin, 2012
• Switching in Systems and Control, D. Liberzon, Springer, 2003
• Hybrid Dynamical Systems: Modeling, Stability, and Robustness,R. Goebel, R. G. Sanfelice and A. R. Teel, 2012
• Predictive Control for Linear and Hybrid Systems, F. Borrelli, A.Bemporad and M. Morari, 2013.
Survey paper:
• Hybrid Dynamical Systems: An Introduction to Control and Verification,H. Lin and P. J. Antsaklis, 2014
Other topic-specific papers to be given later on
2 / 13

Hybrid Systems
Hybrid systems: dynamical systems with interacting continuous-time anddiscrete-time dynamics
• State consists of a continuous state x and a discrete state (mode) q
• Dynamics of continuous state: x = f (q, x , u)• Dependent on discrete state and external continuous input u
• Dynamics of discrete state: q+ = g(x , q, σ)• Discrete transitions triggered by
• Continuous state x reaching a subset (called guard)• External discrete input σ
• After transition, continuous state x may jump via a reset map
3 / 13
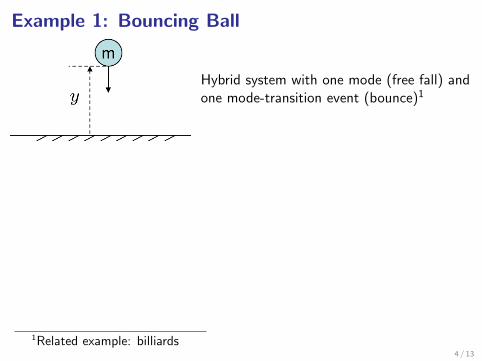
Example 1: Bouncing Ball
Hybrid system with one mode (free fall) andone mode-transition event (bounce)1
1Related example: billiards4 / 13

Example 2: (Simple) Room Temperature ControlTurn on/off heater to keep temperature near 20◦C
Control stategy:
• turn heater on if T ≤ 18
• turn heater off if T ≥ 22
5 / 13

Example 3: Water Tank
xi : volume of water in tank iri : minimum allowed volumevi : outflow rate of tank iw : inflow rate by pump
Goal: keep xi ≥ riPump modes: q = {1, 2}
6 / 13

Example 4: Aircraft Collision Avoidance
Flying modes:
• Cruising (straight)
• Left turn
• Right turn
• Climbing
• Descending
Goal: find (mode-switching) protocol to avoid A/C collision
7 / 13

Example 4: Supervisory Switching Control
• Discrete state q: id of the controller chosen by the supervisor
• Continuous state x : internal state of the plant
8 / 13

Example 5: Variable Structure Control
Given a nonlinear system x = f (x , u), design (discontinuous) control u sothat it is piecewise smooth on different parts of the state space
Example: sliding mode control
9 / 13

Example 6: Networked Control Systems
Plant dynamics x = Ax + Bu
Plant state x transmitted over the network
• State transmitted to controller over the network at times t0, t1, . . .
• Controller stores received state value between transmissions:
x(t) = x(tk), t ∈ [tk , tk+1)
• Linear stored state feedback controller: u(t) = K x(t)
Stabilization: can we make x(t)→ 0?
Event-triggered control:
10 / 13

Example 7: B. Subtilis Cell
A stochastic (probabilistic) hybrid system
11 / 13
Topics Covered in This Course
Topics:
• Continuous and discrete-time system models
• Hybrid systems models and solution properties
• Reachability analysis
• Stability analysis
• Optimal control
• Estimation and identification
• Advanced topics
12 / 13

Big Picture
This course will be mostly from the control theoretical point of view
13 / 13