355a automatizada con gps rtk.doc) - s3.amazonaws.com · en el campo de sensado de variables...
TRANSCRIPT

Sistemas de guía automatizada de maquinaria con
GPS RTK Outback
Pulverización Dirigida en barbechos
- Sensores de clorofila WEEDit -
Gustavo Miolano
Responsable Técnico de Area - Agricultura
Geosistemas SRL
0358-155067435
Desde el banderillero “humano” al banderillero satelital
En los últimos años hemos sido testigos de innovaciones y descubrimientos que han mejorado nuestra
calidad de vida, a la vez que, incrementando nuestra capacidad productiva, han llevado hasta limites
insospechados tiempo antes la frontera de la realidad y la ficción. Desde la PC al teléfono celular, estos
procesos de desarrollo tecnológico han contribuido al progreso en todos los campos del conocimiento y de
la industria.
El campo no puede estar ajeno a estos cambios y oportunidades; en este tiempo hemos visto nuestros
agricultores siendo pioneros en la aplicación de soluciones de alta tecnología en sus procesos productivos.
Esa revolución de la “electrónica” aplicada a la maquinaria agrícola, ha fomentado la aparición de nuevos
productos y soluciones, centrándose en dos áreas básicas de acción
• Sensado de variables georreferenciadas
• Automatización de tareas
En el campo de Sensado de variables Georreferenciadas, existen en el mercado monitores de cosecha,
siembra y pulverización que miden las variables fundamentales de trabajo y generan como resultado mapas,
donde se posiciona en cada espacio del lote la lectura situada de esa variable.
En el campo de la automatización, los avances en las técnicas de reconocimiento de situaciones han
permitido relevar al operario del tractor o maquina de ciertas tareas que anteriormente le eran propias.
Las razones que fundamentan la automatización de tareas en la agricultura moderna, se centran en:
• Evitar la intervención humana en tareas repetitivas, fuente de errores y sesgos producto de la
fatiga, condiciones de visión, tipo de terreno, etc.
• Asegurar un trabajo correcto independientemente de las cualidades del operario
• Mejorar la calidad de las tareas de siembra, pulverización y cosecha, respetando y
asegurando el correcto espaciado entre surcos
• Mejorar la capacidad de trabajo nocturno y en campos o condiciones donde los sistemas de
guiado tradicionales, por ejemplo marcadores, son de muy difícil visualización
• Incrementar la eficiencia productiva, permitiendo menores costos en las tareas, evitando un
excesivo solapamiento de las pasadas del tractor o maquina, disminuyendo la sobre aplicación
de agroquímicos, y garantizando la correcta implantación de los cultivos, como su posterior
cosecha.
En ciertos casos, ambas categorías, Sensado y automatización, pueden venir en unidades o “equipos”
separados, independientes el uno del otro. Existen soluciones integradoras de ambas funciones, tales como
el Banderillero Satelital Inteligente Outback MAX, desarrollado específicamente para ser adaptable a
pulverizadoras de alto rendimiento.
Este sistema permite censar variables georreferenciada, como por ejemplo caudal por hectárea, flujo,
presión y traducirlas a un mapa, como resultado del trabajo.
De igual manera incorpora tareas automáticas, ya que controla y comanda sin intervención del operador, la
apertura y cierre de las secciones de pulverización, la presión y caudal de trabajo y piloto automático.

Sistema de guiado, computadora de dosis, aplicación variable, corte automático de secciones y
piloto automático OUTBACK MAX
Adaptación de los sistemas de guía automático en La Argentina
El primer acercamiento del agro con sistemas de guía “electrónica” se gestó a través del mercado de la
pulverización aérea. Este tipo de tareas requiere de un sistema de guía que no perturbe la atención del
piloto, que sea ágil y de fácil interpretación, a la vez que seguro y confiable. Allí surgieron los primeros
banderilleros satelitales. Geosistemas introdujo en la Argentina la marca Satloc, pionera mundial en el
segmento aéreo.
Con el tiempo estos sistemas de guía se fueron popularizando y captaron el interés de los usuarios de
pulverización terrestre, mientras que salían al mercado soluciones adaptadas en su totalidad a ese
segmento.
Allí es cuando marcas como Outback avanzó en el despliegue de sistemas pensados y desarrollados
específicamente para el productor o contratista que desea un guiado sencillo y confiable.
Estos sistemas de guiado fueron bautizados como “Banderilleros Satelitales”, ya que sustituyen al
banderillero humano como sistema de guía.

Este tipo de desarrollos se basan y operan sobre el sistema GPS, para referenciar líneas de guiado que
serán el patrón sobre el cual se llevará a cabo la tarea del lote.
En todos los casos el usuario define la línea o curva sobre la que desea trabajar, y el banderillero genera
replicas de la misma, copiadas y desplazadas tantos metros como sea el ancho de labor alcanzado.
Para aumentar la calidad de la referencia de las líneas, resulta indispensable trabajar con técnicas de
corrección de señal, evitando los errores propios del sistema GPS. De ahí que los equipos Outback cuentan
con el sistema de corrección Edif, que provee una corrección constante y segura, generada por el propio
banderillero a través de la toma de muestras de señal. De esa manera se garantiza un trabajo sin
interrupciones y con una precisión lógica para trabajos de pulverización y fertilización.
Una vez definido ese patrón de guiado, el mismo banderillero servirá como guía para completar la tarea.
Un sistema de barra de luces permite al operario conocer su posición con respecto cualquiera de las líneas
de guiado; de esa manera el sistema indica las correcciones que resultan necesarias a cada momento, con
un sistema predictivo de volante que resalta de manera clara y sin distracciones la acción a realizar.
Sistema de guía “tradicional”. Banderillero Outback con guía por barra de luces
El piloto Automático
Si bien el Banderillero Satelital vino a satisfacer gran parte de la demanda de guiado del productor moderno,
la intervención humana sigue resultando indispensable para la calidad del trabajo realizado; es el operario
quien se encargará de interpretar las indicaciones y transformarlas en movimiento sobre la dirección del
vehículo.

Por ello, y conociendo todas las ventajas que impone la automatización en las practicas agrícolas, se fueron
desarrollando sistemas de guía automática, conocidos como “Pilotos Automáticos”. Los mismos a través de
las indicaciones del banderillero, y sumado a un Sensado de los movimientos del vehículo, producen
correcciones suaves y precisas sobre la dirección a fin de garantizar un guiado consistente con el patrón
fijado. Esto se traduce en líneas más rectas, y en distancia entre pasadas más acorde a las tareas.
Ya en el año 1999, en un esfuerzo conjunto con el fabricante de pulverizadoras PLA se desarrollo en
Argentina el primer prototipo de sistema de guía automática del mundo, o como hoy se lo conoce, piloto
automático.
A partir de ese momento los sistemas han ido evolucionando para conseguir correcciones más finas y una
exactitud sobre el terreno que excede los estándares de la labor manual.
Existen dos variables que sirven para identificar y diferenciar las diferentes configuraciones de piloto
automático existentes
• Capacidad de censado de movimientos
• Capacidad de actuación sobre la dirección
Existen diferentes sistemas de giróscopos, acelerómetros, sensores de ángulo de rueda, que permiten
reconocer los movimientos reales del vehículo sobre el terreno. Esto sumado a la información proveniente
de la antena GPS, permite al sistema de guiado tomar decisiones sobre las correcciones a efectuar.
Las directivas de corrección se transfieren al sistema de dirección original del vehículo a fin de ajustar el
rumbo según sea necesario para mantener la línea asignada al trabajo.
Los sistemas Edrive TC y Edrive X de Outback incorporan sensores que permiten modelar los movimientos y
la situación real del vehículo a controlar, lo que conlleva decisiones de guiado más consistentes.
Ambos sistemas trabajan con electroválvulas hidráulicas, o sea que controlan la dirección valiéndose del
sistema de equipamiento original del vehículo. De esa manera se consiguen correcciones libres de juegos
mecánicos producidos por el volante, a la vez que garantizan un andar suave y sin sobresaltos a través de la
línea de guiado
El sistema Edrive X incorpora además la posibilidad de trabajo en marcha reversa, así como la exclusiva
función de giro automático en cabecera, librando al operario de esa tarea. Con la aplicación de estas
características se consigue un guiado de “manos libres” dentro del lote de trabajo.

Piloto automático Outback Edrive TC
Piloto automático Edrive X, con giro automático en cabecera
Sistemas de corrección RTK
En la medida que los pilotos automáticos incrementan su capacidad para seguir una línea, el sistema de guía
necesita líneas “mejor dibujadas”. Por ello es lógico pensar que de la mano de sistemas más exactos para la
gestión de la dirección, surge la necesidad de mayores precisiones en el sistema GPS.
Ello se consigue aplicando técnicas para depurar la señal recibida de los satélites, de manera de obtener de
ella toda la información disponible, alcanzando precisiones cercanas a los 2 cm.
Con este fin se utiliza el método de corrección RTK, que no es otra cosa más que la traducción de
“movimiento en tiempo real”

Este método consta de una base fija, montada sobre un trípode movible o una torre. La misma recibe la
señal GPS, utilizando técnicas propias de cada sistema, corrige los errores que recaen sobre la información
obtenida. El fundamento de ser fija es que de esa manera puede fijar una coordenada “cierta” y comparar
todas las subsecuentes para identificar los desvíos.
El resultado de esta técnica es una corrección que es enviada vía un enlace de radio al receptor o Rover, a
una tasa de transmisión que garantiza una comunicación plena.
Base correctora RTK Outback A321. Puede utilizarse comó base movible, sin límite de transporte
por todo el país, o como Estación Fija con radios de más de 25 km de alcance.
Tanto la base como el Rover se encuentran en la misma área, por lo tanto es lógico suponer que afrontan
las mismas desviaciones y errores. La base al permanecer estacionaria en el tiempo, corrige la señal GPS
utilizando técnicas que en movimiento no serian posibles. Una vez generada, la información de la corrección
es enviada al Rover para incluirlas en el cálculo de la línea generada por el banderillero.
El receptor o Rover, va montado sobre la máquina o tractor, recibe la corrección de la base y la incorpora
como corrección a la señal GPS propia. Por este método se consiguen líneas más ajustadas y sin deriva a
través del tiempo, lo que garantiza errores en las líneas centimétricos y una repetitividad que permite
“hacer melgas” o efectuar diferentes tareas en diferentes tiempos sobre el mismo lote.
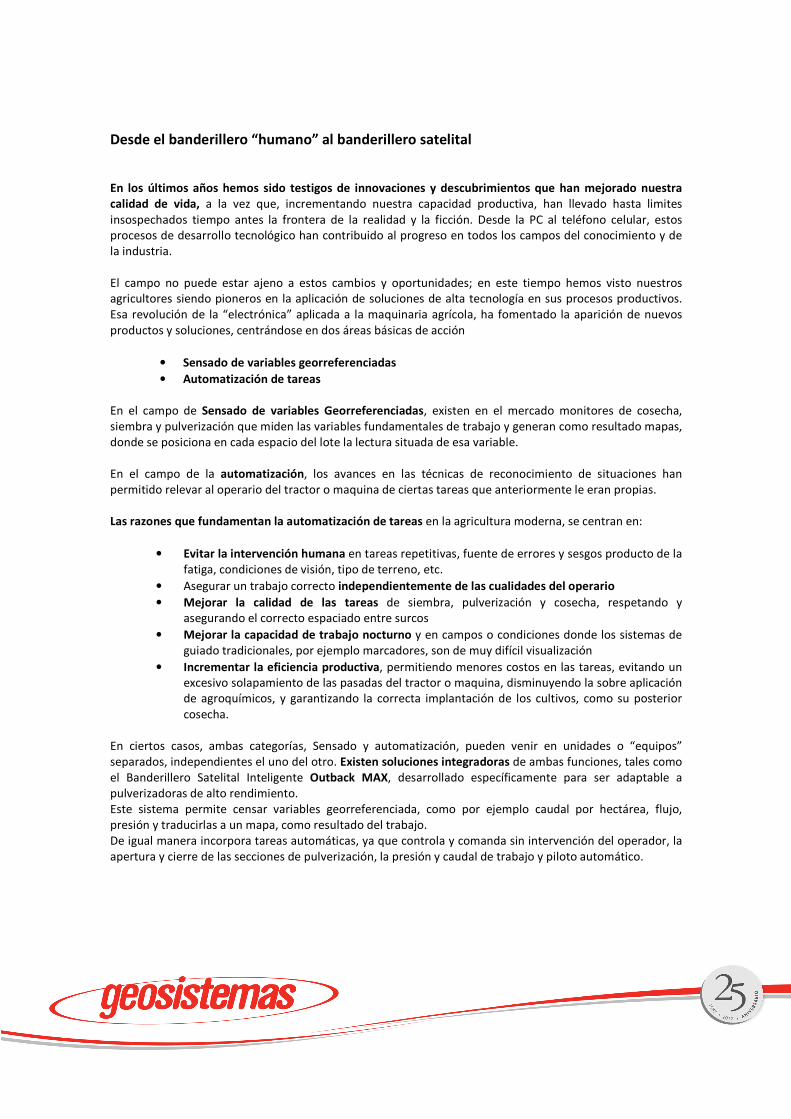
Esquema general del funcionamiento del sistema Outback RTK
Una misma base puede alimentar tantos Rover como haya en su área de cobertura, lo que facilita la
incorporación de señal RTK en explotaciones fijas.

Pulverización Dirigida en barbechos
- Sensores de clorofila WEEDit -
En los últimos años, y dada la masificación de la
técnica de siembra directa, ha cobrado vital
importancia el manejo de las poblaciones vegetales
espontáneas (malezas) dentro del lote,
especialmente en el periodo de barbecho, entre
cultivos de la rotación.
Los periodos de barbecho largos, y el consumo
improductivo de factores del suelo que trae
aparejado la presencia de malezas dentro del lote,
hacen necesario contar con herramientas que
permitan un control total de las mismas, a la vez que
implican minimizar los costos de aplicación.
A su vez, la aparición de malezas resistente y
tolerantes, obliga a aplicaciones con principios
activos cada vez más costos y agresivos con el medio
ambiente y con el suelo, que empleados de manera
indiscriminada en todo el lote produce costos
innecesarios, y paralelamente genera potenciales
riesgos a los cultivos subsiguientes, asi como un daño
al medio ambiente.
Por todas estas razones, existe en la Argentina y en el
mundo, la inquietud por desarrollar soluciones
aplicables por los productores y contratistas de todas
las escalas, que permitan:
• minimizar y controlar el impacto medioambiental
• un manejo eficaz control de malezas resistentes
• reducir el uso de agroquímicos y costos de aplicación
• desalentar la aparición de nuevas malezas tolerantes
La tecnología de Pulverización Dirigida WEEDit nace en Holanda a través de su fabricante, la firma
Rometron.
Rometron, desde el año 1996 trabaja en el desarrollo de tecnologías para la detección y control de malezas
para la industria, mantenimiento de calles urbanas y parquización.
En el año 2009, de la mano del mercado agrícola australiano, comienza un proceso de perfeccionamiento de
sus tecnologías enfocado hacia actividad agrícola a gran escala, desarrollando la solución de la aplicación
dirigida de herbicidas para productores de granos en siembra directa.
Es dicha experiencia de éxito, en un país de condiciones ambientales y agronómicas similares a Argentina, la
que impulsa a Geosistemas a incorporar a su gama de productos el sistema WEEDit.
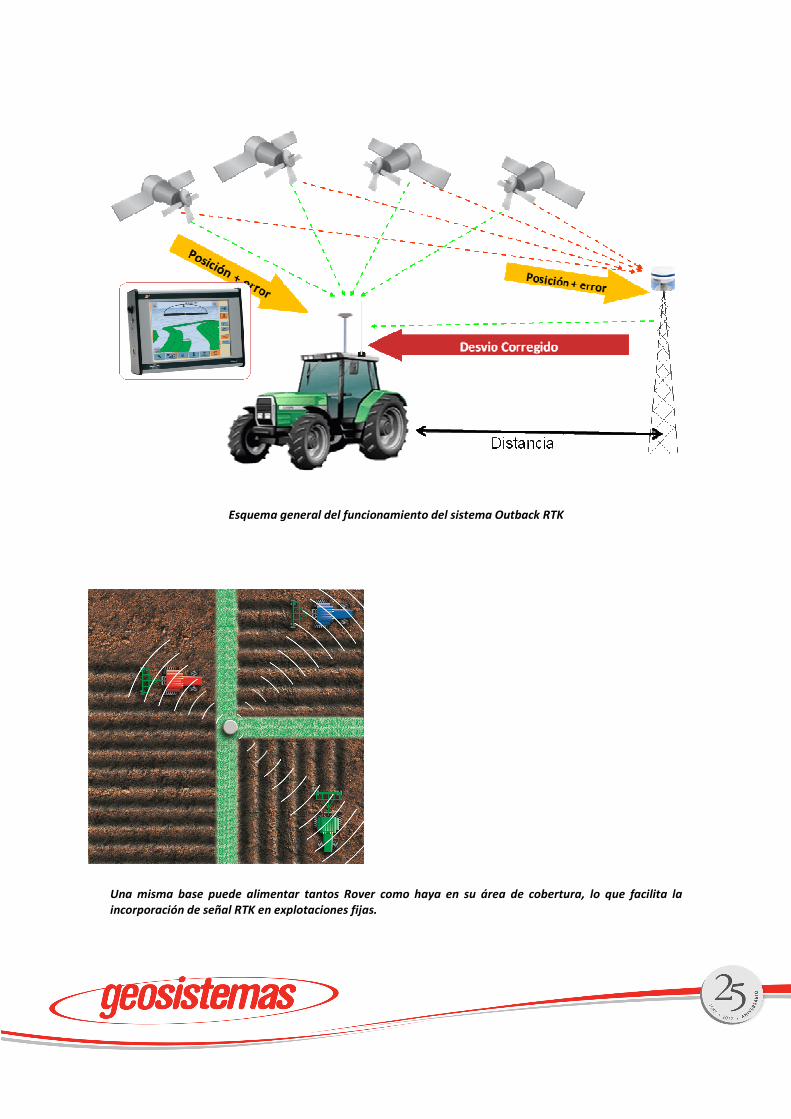
Principio de funcionamiento
La función fundamental del sistema WEEDit es detectar la presencia de malezas en un lote de barbecho,
identificando su posición y tamaño a fin de pulverizar de manera dirigida sobre las mismas.
Avance de la pulverizadora
Detecta la maleza Pulveriza “solo la maleza” Muere la maleza
Para ello el WEEDit sincroniza el funcionamiento de dos sistemas que trabajan de manera conjunta, a fin de
garantizar la máxima eficiencia en el control de malezas: el sistema de Detección y el sistema de
Pulverización
Sistema de Detección
El sistema de detección es el encargado de escanear cada centímetro de terreno con el objeto de poder
distinguir las malezas dentro de un barbecho, identificándolas y localizándolas en relación a la posición de
cada sensor.
La detección de las malezas se realiza a través de la diferenciación de la clorofila (presente en todas las
plantas verdes) valiéndose de las propiedades de fluorescencia de la misma.
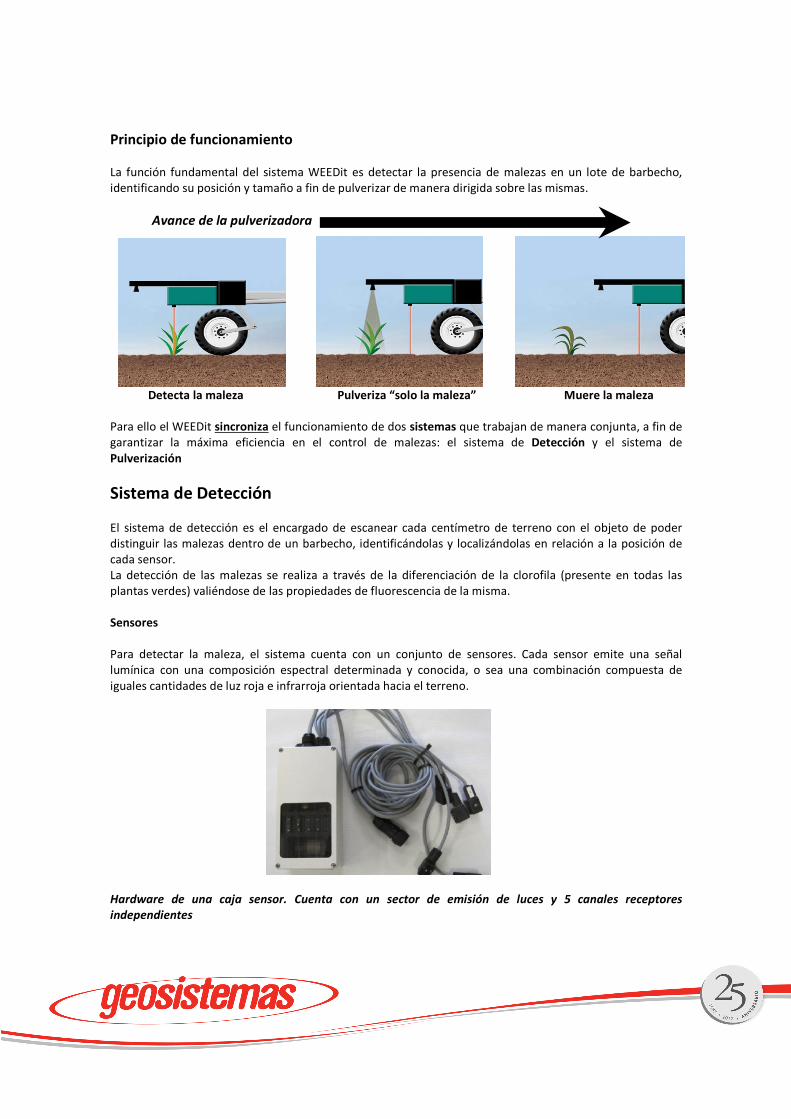
Sensores
Para detectar la maleza, el sistema cuenta con un conjunto de sensores. Cada sensor emite una señal
lumínica con una composición espectral determinada y conocida, o sea una combinación compuesta de
iguales cantidades de luz roja e infrarroja orientada hacia el terreno.
Hardware de una caja sensor. Cuenta con un sector de emisión de luces y 5 canales receptores
independientes

Dicha señal lumínica es reflejada por los pigmentos que contienen clorofila, y devuelta al sensor con una
composición espectral diferente conocida como NIR, o infrarroja cercana (menos luz roja y más luz
infrarroja); bajo ese criterio se diferencian con respecto a aquellos elementos del barbecho que no
contienen clorofila.
De esta manera cada sensor amplifica y descompone la luz recibida, a fin de analizarla y compararla con la
luz emitida por el mismo, con el objeto de determinar si en su banda de lectura correspondiente hay
presencia de malezas, y en función de ello ordena al sistema de pulverización aplicar agroquímico sobre la
misma.
Sistema detección por luz roja y NIR
Cada sensor puede efectuar 40.000 comparaciones por segundo, por lo que la capacidad de resolución y
respuesta es inmediata.
Diagrama de sensores y picos, replicable hasta 36 metros de ancho

El rango de lectura de cada uno de los 5 sensores incorporados a cada una de las cajas, se entrelaza con los
demás, de manera que permita una mayor cobertura en altura para facilitar el dimensionamiento
tridimensional de la maleza a tratar, contribuyendo además a que la maleza pueda ser detectada en
entornos donde el barbecho pueda ocultarla.
Características salientes
• Ancho de trabajo máximo 36 metros (36 cajas sensores)
• Banda de lectura en cada sensor 20cm
• Hasta 40.000 lecturas por segundo
• Una caja de sensores por cada metro de ancho de labor, con 5 sensores incorporados
• Velocidad máxima de detección hasta 25kmh
• Sin calibración de fondo o terreno
• Trabajo nocturno o diurno
• Lectura malezas del tamaño aproximado de una moneda de 25 ctvs.
Sistema de Pulverización
Cada franja de lectura, de 20 cm, relacionada a cada sensor, puede aplicar el agroquímico de manera
independiente.
Para ello utiliza un sistema PWM o modulación por ancho de pulso, que le permite realizar la apertura de la
pulverización en 1/1000 segundo.
Pico PWM con control independiente

Los sistemas de pulverización, se desarrollan normalmente para trabajar por secciones de apertura, que a su
vez incluyen una cantidad determinada de picos aplicadores. En un sistema selectivo, al ser cada pico
independiente del resto, se debe adaptar el circuito para mantener una presión constante aun en casos
extremos como serian la apertura total de la barra o solo de un pico, según las condiciones del suelo lo
requieren.
Para ello se incorpora un elemento de regulación de presión neumático, conocido como válvula de Ramsey.
La válvula es alimentada por un pequeño compresor de aire. Al ajustarse sobre la válvula la presión deseada
(según el tipo de gota y caudal que se quiere obtener), actuará empujando el líquido (si la presión debe
subir) o como válvula de alivio (si la presión debe bajar), asegurando mantener siempre el valor ideal de la
misma en cualquier condición.
La importancia de este valor se pone de manifiesto al analizar la cantidad de impactos de agroquímico que
debe obtenerse en cada maleza, más aun en el caso de que sistema de pulverización esté activado solo al
pasar encima del elemento detectado.
Válvula de Ramsey y compresor montado sobre una pulverizadora
Características salientes
• Apertura instantánea de cada sección
• Picos independientes a 20 cm
• Picos abanico plano de acero inoxidable
• Tipo de gota regulable a través de la presión
• Presión constante con asistencia neumática
• Mínima deriva
Sistema de sensor y pico montados sobre el botalón de una pulverizadora
Sincronización

La única manera de garantizar que el producto sea efectivamente aplicado sobre la maleza, sin
desplazamientos o errores, es a través de una perfecta sincronización entre el sistema de detección y el de
pulverización.
Para conseguir dicho objetivo, resulta fundamental controlar el desfasaje de tiempo que existe entre el paso
de los sensores y de los picos de pulverización sobre cada maleza.
Si bien el sistema, a través de lecturas instantáneas y de la apertura de los picos un 1/1000 de segundo,
garantiza que una maquina que avanza a 25 kmh, puede pasar del estado cerrado a pulverizar en cualquiera
de sus picos independientemente (o todos ellos simultáneamente si fuera el caso) en el equivalente a
recorrer 8 milímetros de terreno, es indispensable controlar dos factores fundamentales para obtener una
perfecta sincronización entre sensor y pico
1. Distancia entre ambos
2. Velocidad de avance
La distancia entre ambos, es un dato de configuración por lo cual una vez medido de manera precisa e
ingresado a través de la programación de la consola, no puede variar.
La velocidad de avance es variable, según la situación de pulverización, accidentes del terreno, criterio del
usuario. Resulta fundamental conocer dicho valor con precisión, para que el sistema pueda calcular la
demora en el paso de los picos sobre la maleza que detecto el sensor correspondiente.
Para ello el sistema Weedit cuenta con un sistema de doble sensor velocidad de rueda, que incorpora la
medición de velocidad en la rueda derecha e izquierda de manera simultánea.
Sensor de velocidad montado sobre la rueda de un pulverizador
Esto le provee en una línea recta de trabajo, una doble información de giro, que garantiza una medición de
velocidad precisa y sensible aun a pequeñas aceleraciones o desaceleraciones.
En una curva de trabajo, las velocidades sobre distintas áreas del botalón son diferentes según el ángulo de
giro. Es asi que permite diferenciar la velocidad sobre ambas ruedas a fin de regular tal desfasaje de manera
independiente para los sensores y picos de cada sector del botalón.
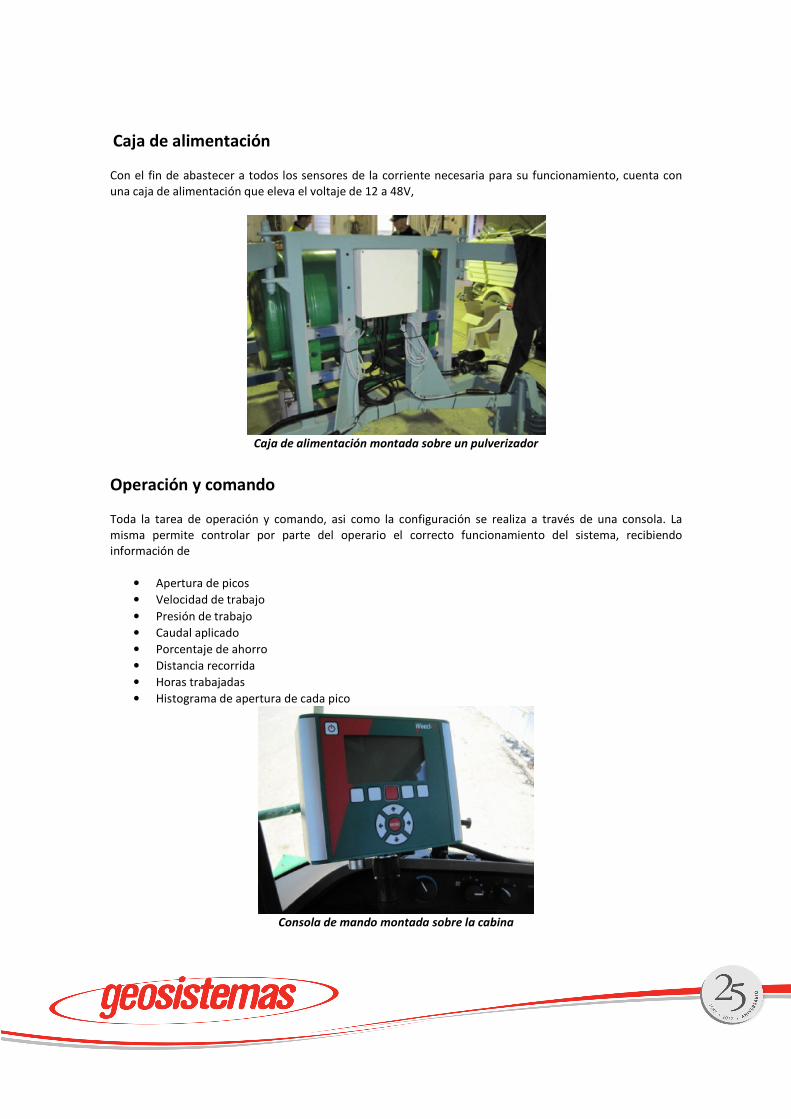
Caja de alimentación
Con el fin de abastecer a todos los sensores de la corriente necesaria para su funcionamiento, cuenta con
una caja de alimentación que eleva el voltaje de 12 a 48V,
Caja de alimentación montada sobre un pulverizador
Operación y comando
Toda la tarea de operación y comando, asi como la configuración se realiza a través de una consola. La
misma permite controlar por parte del operario el correcto funcionamiento del sistema, recibiendo
información de
• Apertura de picos
• Velocidad de trabajo
• Presión de trabajo
• Caudal aplicado
• Porcentaje de ahorro
• Distancia recorrida
• Horas trabajadas
• Histograma de apertura de cada pico
Consola de mando montada sobre la cabina

De la misma manera, tiene a disposición del usuario 2 configuraciones principales que pueden ser reguladas
según las condiciones de la aplicación
• Sensibilidad de detección
• Sensibilidad de aplicación
Si bien el sistema se auto calibra a las condiciones actuales de la aplicación, ya sea de día o de noche, la
sensibilidad de detección puede variarse a fin de determinar el tamaño mínimo de maleza que debe
detectarse para que el sistema determine la apertura de pulverización.
La sensibilidad de aplicación puede ajustarse, según las condiciones de deriva o márgenes de seguridad
deseada para que la aplicación del agroquímico se anticipe la cantidad de centímetros que resulte necesario
en cada caso.
Criterio primordial de seguridad
Dadas las características de su funcionalidad, se puede afirmar que el sistema Weedit, trabaja sobre un
criterio lógico binario, determina si HAY o NO HAY presencia de clorofila y aplica en consecuencia, sin puntos
intermedios.
De ello se deduce que existen dos posibles situaciones de error en la detección de malezas
1. Fumigar en un lugar donde no hay malezas
2. No Fumigar en un lugar donde hay malezas
Está claro que si bien, la situación 1 no es deseable desde la perspectiva del ahorro de producto, la situación
2 es por lejos la más peligrosa y contraproducente en el manejo de malezas. Es por ello que todo el sistema
está diseñado para, en caso de duda sobre la aplicación o no sobre el terreno, se decide por pulverizar.
Aun en los casos donde se supere la velocidad máxima de trabajo, la pulverización permanecerá totalmente
abierta para garantizar un tratamiento correcto.
Resultados obtenidos
En 2012 se comenzó a adaptar esta tecnología a las necesidades agronómicas de nuestro pais, testeando
sobre barbechos bajo un protocolo de pruebas a fin de determinar las funcionalidades y grado de
adaptación del equipo al medio local.
Para ello se monto sobre una pulverizadora de arrastre experimental, con un ancho de labor reducido.
Las pruebas realizadas en Argentina, confirman los resultados obtenidos en Australia: Se han comprobado
ahorros de herbicidas promedio del 60%, con lotes que arrojan ahorros superiores al 80%.
En definitiva el grado de ahorro alcanzable se relaciona con la cantidad de malezas presentes en el lote, el
momento y la cantidad de pasadas por campaña.
El abanico de criterios y recetas agronómicas que se abre de la mano de esta tecnología permite garantizar
sustentabilidad y protección medioambiental, permitiendo mejores practicas agronómicas en materia de
tratamientos con agroquímicos para un control efectivo de malezas.