31 march 2009 mmi ontdev 1 autonomous mission operations for sensor webs al underbrink, sentar, inc
TRANSCRIPT

31 March 2009 MMI OntDev 1
Autonomous Mission Operations for Sensor WebsAl Underbrink, Sentar, Inc.

31 March 2009 MMI OntDev 2
• Using Intelligent Agents to Form a Sensor Web for Autonomous Mission Operations (SWAMO)
– PI: Ken Witt, West Virginia High Technology Consortium Foundation
– Co-I: Al Underbrink, Sentar, Inc.
– Co-I: Dan Mandl, NASA/GSFC
• Objective
– Enable dynamic, composable interoperability of sensor web products and services
Project Overview

31 March 2009 MMI OntDev 3
• Consistent with OGC SWE standards and specifications – Enables compatibility with broad base of sensing systems
– SensorML, SOS, SPS, CWS
• Semantics of the SWE-compatible sensor systems– Physical and logical structure and descriptions
– Platforms, sensing devices, observations, detector performance characteristics, etc.
– Services, processes, workflows, required parameters, process interfaces, etc.
• Semantics of SWAMO control systems – Describes autonomous agents for system-wide resource sharing,
distributed decision making, and autonomic operations
– Intelligent agent capabilities, experiment schedules and tasks, platform workloads, etc.
Semantics for Autonomous Operations

31 March 2009 MMI OntDev 4
Technology Infusion Path
• cFE• GMSEC
• ST-5 • MidSTAR-1
• SensorML• SOS, • SPS, CWS
• MidSTAR-1
• Models• Semantics • Automated Decision Making

31 March 2009 MMI OntDev 5
Levels of Interoperability
Bits and Bytes
Common data and protocol formats for information exchange
Shared meaning
Each system is aware of methods and procedures for other systems
Each system takes into accountstate changes of other systemsover time
Maximum abstraction,implementation independent
31 March 2009 MMI OntDev 6
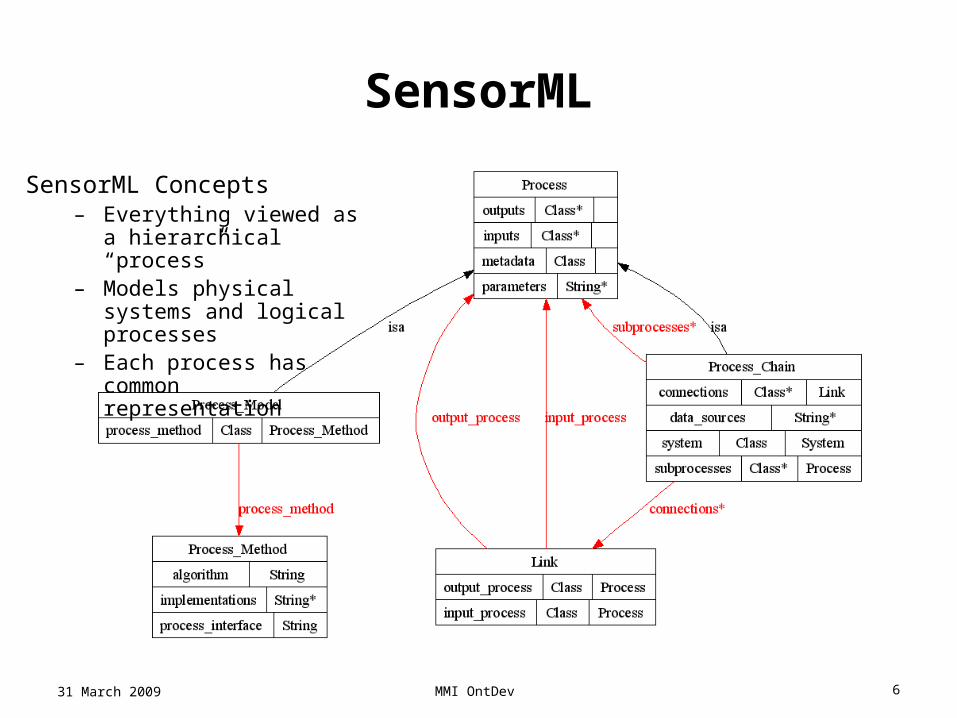
SensorML
SensorML Concepts– Everything viewed as a
hierarchical “process”– Models physical systems
and logical processes– Each process has common
representation

31 March 2009 MMI OntDev 7
SensorML ProcessesProcess Concepts
– Each process has inputs, outputs, metadata, and parameters (similar to IDEF0)
– Inputs, outputs, and metadata provide lots of flexibility for legacy descriptions
– UCUM may be replaced

31 March 2009 MMI OntDev 8
Sensor PlatformsSystem Platforms
– Spacecraft, aircraft, ground systems, subsurface
– Mobile and fixed location
– Passive or actively controlled sensing
System Components – Actuators, sensors,
detectors, and agents– Physical, functional,
logical capabilities and behaviors
– Performance characteristics

31 March 2009 MMI OntDev 9
Sensor Observations

31 March 2009 MMI OntDev 10
SWAMO Agents

31 March 2009 MMI OntDev 11
SWAMO Agents
Agent Performance Concepts– Capabilities, responsibilities,
and goals– Service registry and discovery – Time, tasks, plans and
schedules – Resource capacities and
availabilities

31 March 2009 MMI OntDev 12
SWAMO Rules
• Actually, none!
• Ontology used as prototyping method – Knowledge representation – Decision rules implemented directly
• More agreeable to flight hardware and software systems (MidSTAR-1, Global Hawk, etc.)

31 March 2009 MMI OntDev 13
Instances: MidSTAR-1
• Representation of MidSTAR-1 instances
– Nano ChemSensor Unit and Variable Emmissivity Film sensors/detectors
– Onboard computer and bus subsystems
– Battery as “actuator” that can be controlled

31 March 2009 MMI OntDev 14
• Supports Semantic and System-Of-Systems Interoperability– Able to consume, use, and produce SWE-standard descriptions
– Compatible with existing and future Sensor Web systems
– Amenable to Sensor Web Services interfaces
• Targets Dynamic and Composable Interoperability – Enables automated reasoning and decision support systems
– Sufficient detail for autonomic functions
– Support for failure recovery and adaptive operation
– Enables capability to dynamically discover, combine, and adapt chains of sensors distributed over multiple sensing platforms
Benefits
31 March 2009 MMI OntDev 15
The Way Ahead
• Delay Tolerant Networking • Global Hawk• Benefit science users • AIST 2008
– SWAMO plus – Deeper ontology
development