1 target tracking u u real time tracking of an unpredictable target amidst unknown obstacles by...
Post on 19-Dec-2015
221 views
TRANSCRIPT

1
Target TrackingTarget Tracking
Real Time Tracking of an Unpredictable Target Amidst Unknown Obstacles by Cheng Yu Lee, Hector Gonzalez-Banos and Jean Claude Latombe
Real-time Combinatorial Tracking of a Target Moving Unpredictably Among Obstacles by Cheng Yu Lee, Hector Gonzalez-Banos and Jean Claude Latombe
2
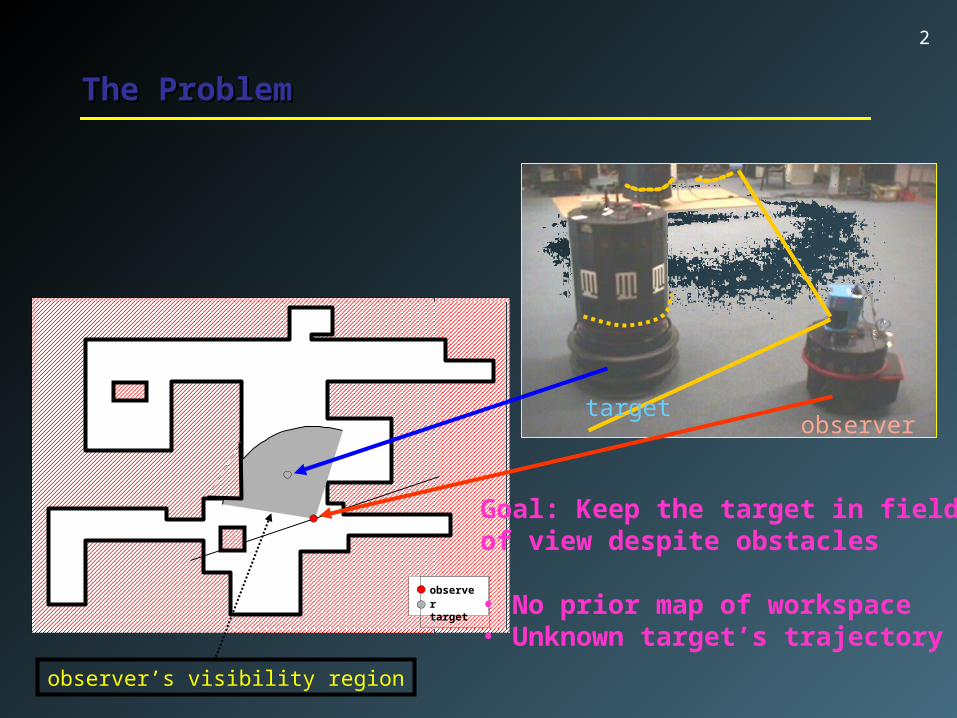
The ProblemThe Problem
observertarget
observertarget
observer’s visibility region
Goal: Keep the target in field of view despite obstacles
• No prior map of workspace• Unknown target’s trajectory

3
The ProblemThe Problem

4
Corner Example:Corner Example:Pure visual servoingPure visual servoing

5
Corner Example:Corner Example:Anticipating OcclusionAnticipating Occlusion

6
Steps of Tracking AlgorithmSteps of Tracking Algorithm
Acquire visibility region / Locate target
Compute shortest escape paths
Associate risk with every shortest escape pathand compute risk gradient
Compute motion command as recursive averageof risk gradients

7
Acquisition of Visibility RegionAcquisition of Visibility Region
Target
using horizontal laser scanner

8
Steps of Tracking AlgorithmSteps of Tracking Algorithm
Acquire visibility region / Locate target
Compute shortest escape paths
Associate risk with every shortest escape pathand compute risk gradient
Compute motion command as recursive averageof risk gradients

9
Shortest Escape Path (SEP)Shortest Escape Path (SEP)
Property of the SEP: ray of Property of the SEP: ray of visibility from observer cut visibility from observer cut at most ones by each SEP.at most ones by each SEP.
We can use a ray sweep We can use a ray sweep algorithm to build the SEP algorithm to build the SEP incrementally. (cf. theorem)incrementally. (cf. theorem)
Target
Observer

10

11
Steps of Tracking AlgorithmSteps of Tracking Algorithm
Acquire visibility region / Locate target
Compute shortest escape paths
Associate risk with every shortest escape pathand compute risk gradient
Compute motion command as recursive averageof risk gradients
12
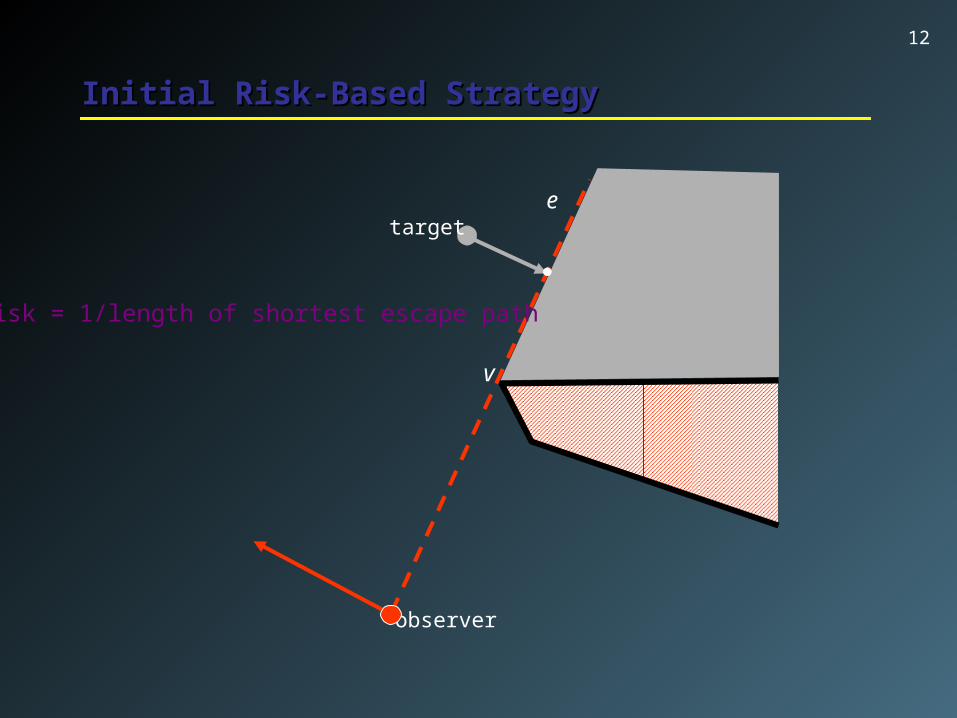
Initial Risk-Based StrategyInitial Risk-Based Strategy
v
e
observer
target
Risk = 1/length of shortest escape path

13
v
p
e
observer
targete’
p’
Initial Risk-Based StrategyInitial Risk-Based Strategy
Risk = 1/length of shortest escape path

14
e
observer
target
Improved Risk-Based StrategyImproved Risk-Based Strategy(other case)(other case)
look-ahead component
v

15
v
p
e
observer
targete”
p”
i
Improved Risk-Based StrategyImproved Risk-Based Strategy
reactive component
look-ahead component
16
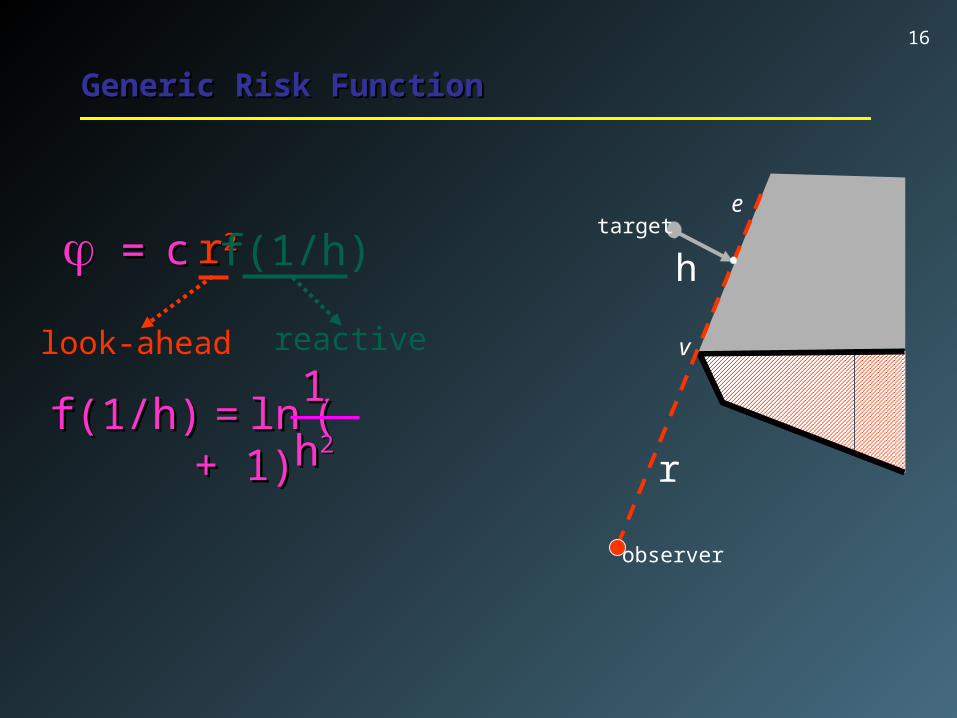
Generic Risk FunctionGeneric Risk Function
v
e
observer
target
r
h
f(1/h)f(1/h) = = lnln ( + ( + 1)1) hh22
11
= = cc rr22 f(1/h)
reactivelook-ahead
17
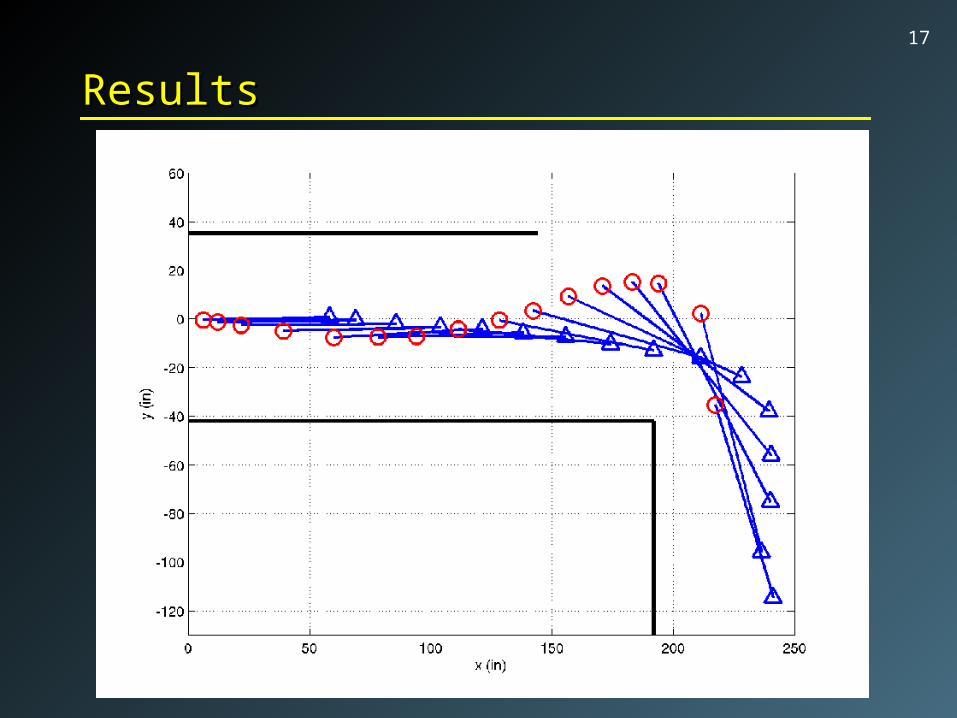
ResultsResults

18
Steps of Tracking AlgorithmSteps of Tracking Algorithm
Acquire visibility region / Locate target
Compute shortest escape paths
Associate risk with every shortest escape pathand compute risk gradient
Compute motion command as recursive averageof risk gradients
19
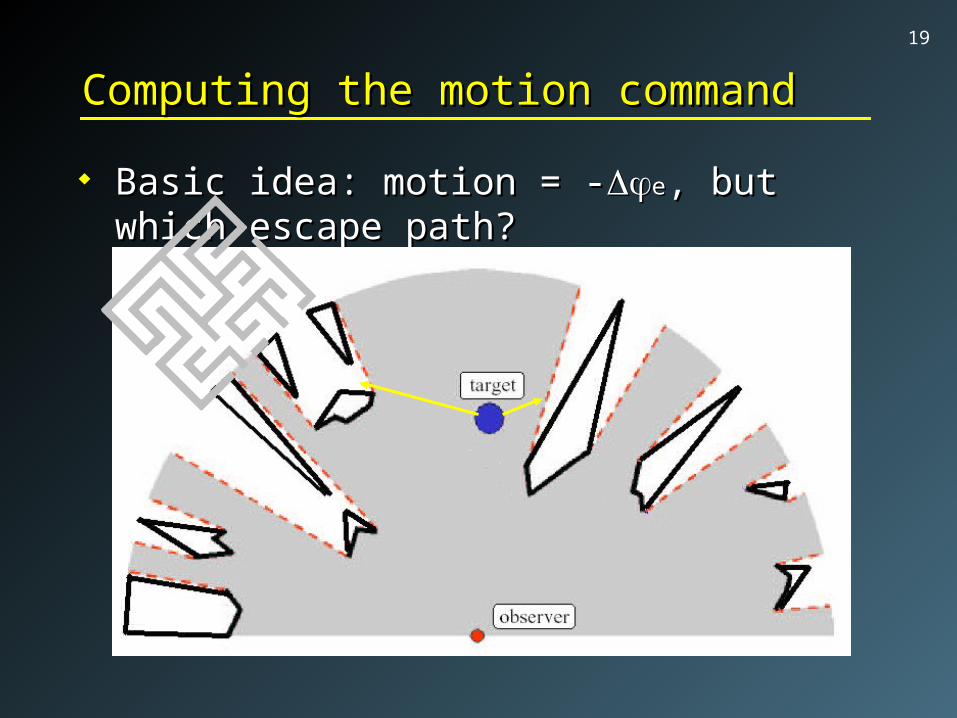
Computing the motion commandComputing the motion command
Basic idea: motion = -Basic idea: motion = -ee, but which escape path?, but which escape path?
20
21
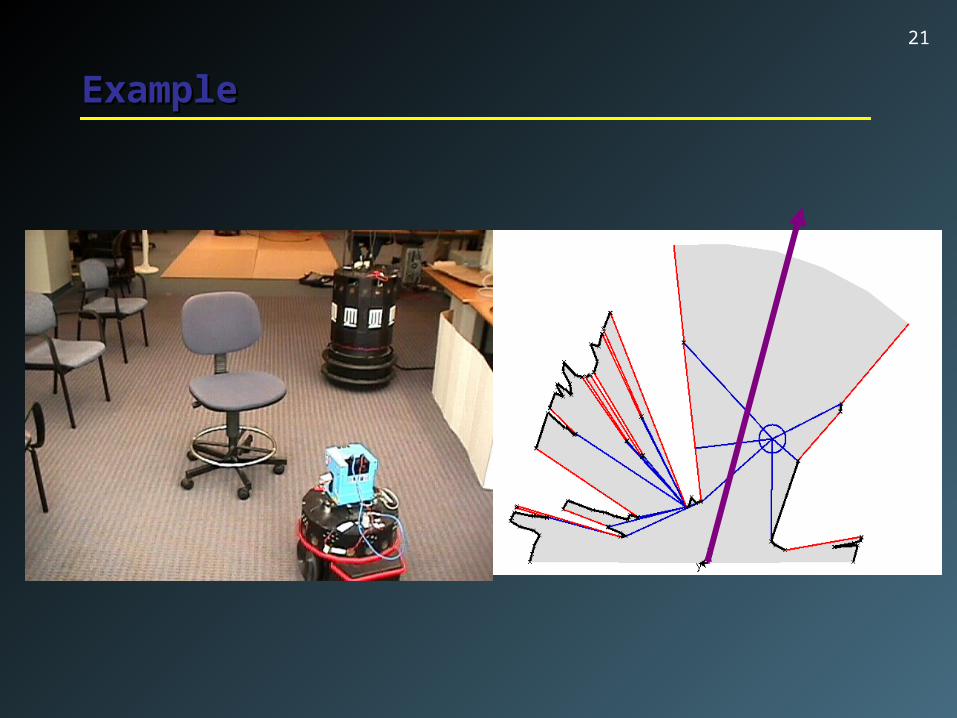
ExampleExample

22
Corner ExampleCorner Example

23
Imagine yourself tracking a moving target in an unknown environment using
a flashlight projecting only a plane of light!

24
Transient ObstaclesTransient Obstacles
25
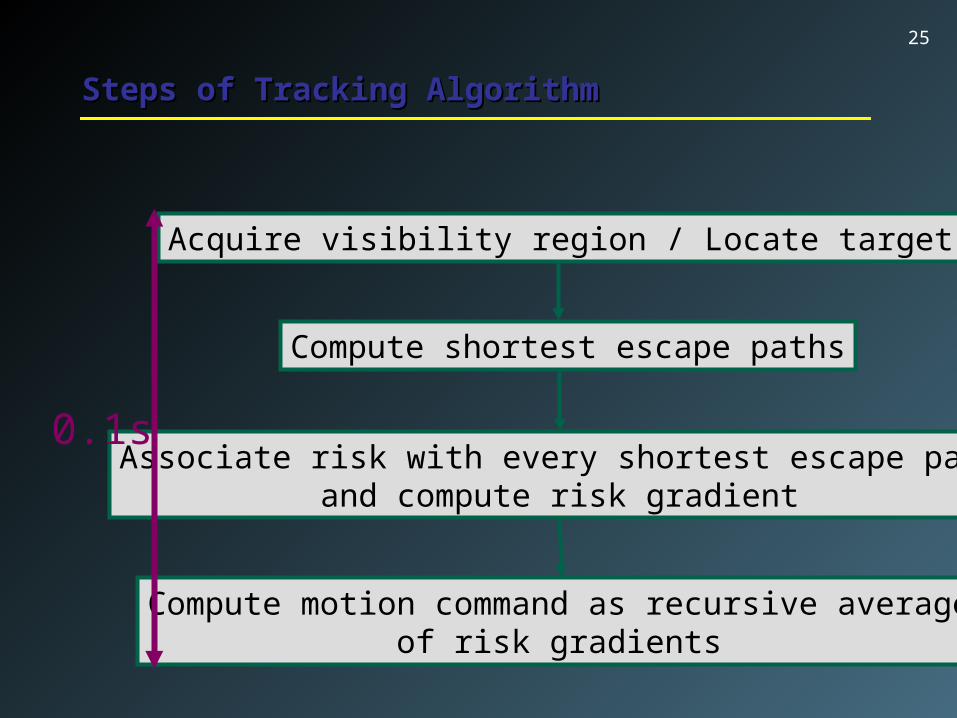
Steps of Tracking AlgorithmSteps of Tracking Algorithm
Acquire visibility region / Locate target
Compute shortest escape paths
Associate risk with every shortest escape pathand compute risk gradient
Compute motion command as recursive averageof risk gradients
0.1s

26
Extension: adjustments for Real RobotExtension: adjustments for Real Robot
Observer and target are modeled as Observer and target are modeled as disksdisks
Observer’s sensor has limited range Observer’s sensor has limited range (8m) and scope (180dg)(8m) and scope (180dg)
Observer is nonhololomic with zero Observer is nonhololomic with zero turning radiusturning radius
27
ConclusionConclusion
Observer successfully tracks swift targets Observer successfully tracks swift targets despite paucity of its sensordespite paucity of its sensor
Fast computation of escape-path tree and Fast computation of escape-path tree and risk gradient (control rate is ~ 10Hz)risk gradient (control rate is ~ 10Hz)
Future work: Multiple observers and multiple Future work: Multiple observers and multiple targets, more dynamic environments targets, more dynamic environments
Could take into account the map it is Could take into account the map it is buildingbuilding