1 nonlinear mapping: approaches based on optimizing an index of continuity and applying classical...
Post on 21-Dec-2015
213 views
TRANSCRIPT

1
NONLINEAR MAPPING: APPROACHES BASED ON
OPTIMIZING AN INDEX OF CONTINUITY AND APPLYING CLASSICAL METRIC MDS TO
REVISED DISTANCESBy Ulas Akkucuk
& J. Douglas Carroll
Rutgers Business School – Newark and New Brunswick

2
Outline• Introduction• Nonlinear Mapping Algorithms
• Parametric Mapping Approach• ISOMAP Approach• Other Approaches
• Experimental Design and Methods• Error Levels• Evaluation of Mapping Performance• Problem of Similarity Transformations
• Results• Discussion and Future Direction

3
Introduction
• Problem: To determine a smaller set of variables necessary to account for a larger number of observed variables
• PCA and MDS are useful when relationship is linear
• Alternative approaches needed when the relationship is highly nonlinear

4
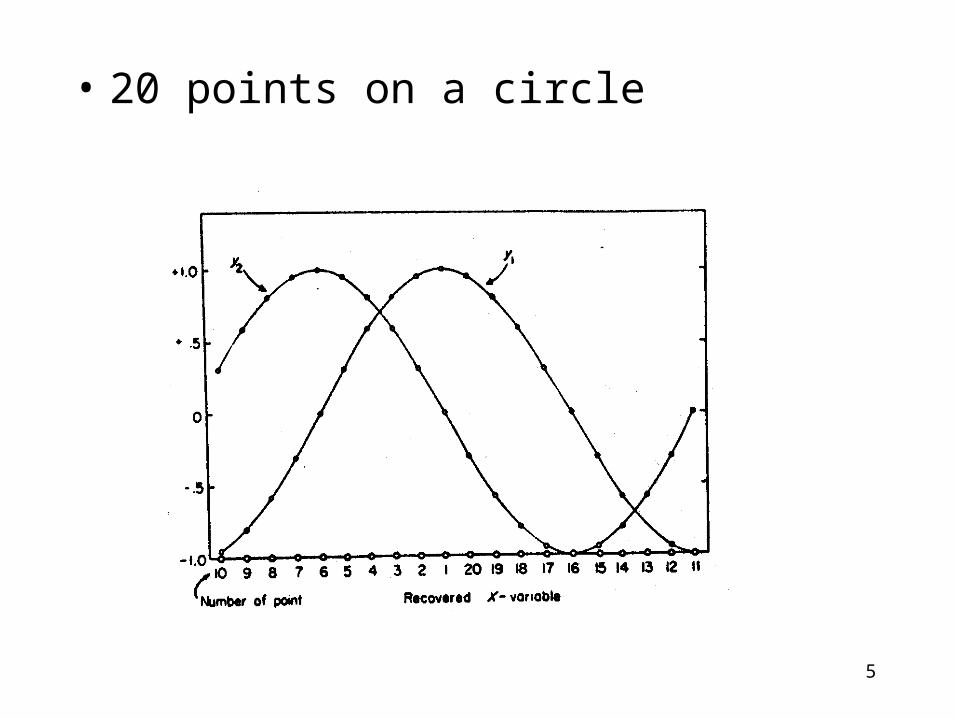
• Shepard and Carroll (1966)– Locally monotone analysis of proximities:
Nonmetric MDS treating large distances as missing• Worked well if the nonlinearities were not too severe (in
particular if the surface is not closed such as a circle or sphere)
– Optimization of an index of “continuity” or “smoothness”
• Incorporated into a computer program called “PARAMAP” and tested on various sets of data
5
• 20 points on a circle
6
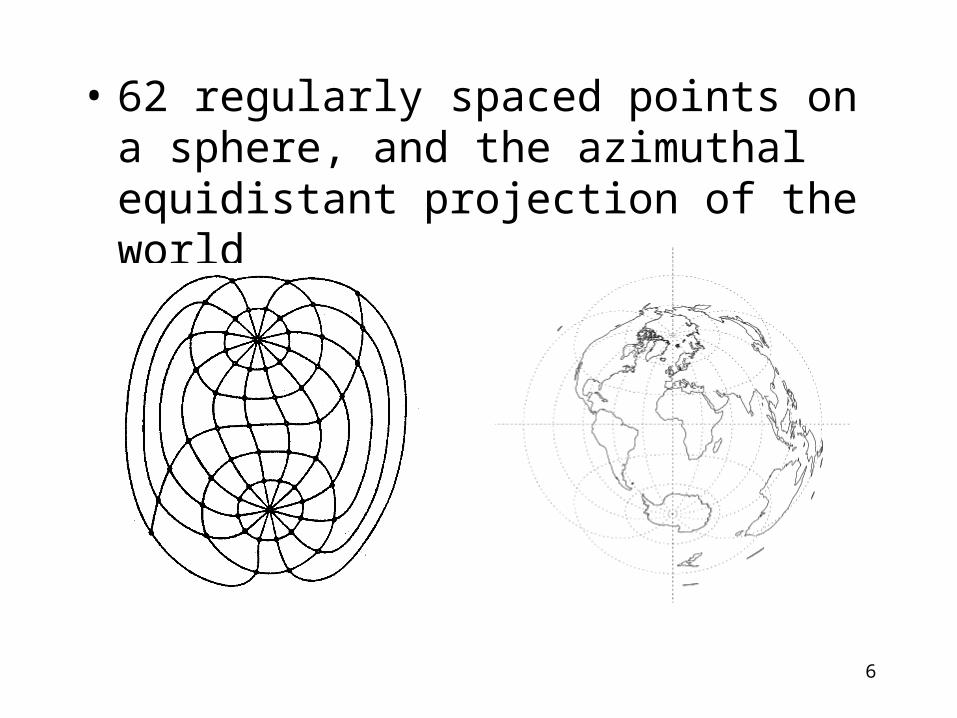
• 62 regularly spaced points on a sphere, and the azimuthal equidistant projection of the world

7
• 49 points regularly spaced on a torus embedded in four dimensions

8
• In all cases the local structure is preserved except points at which the shape is “cut open” or “punctured”
• Results were successful, but severe local minimum problem existed
• Addition of error to the regular spacing made the local minimum problem worse
• Current work is stimulated by two articles on nonlinear mapping (Tenenbaum, de Silva, & Langford, 2000; Roweis & Saul, 2000)
9
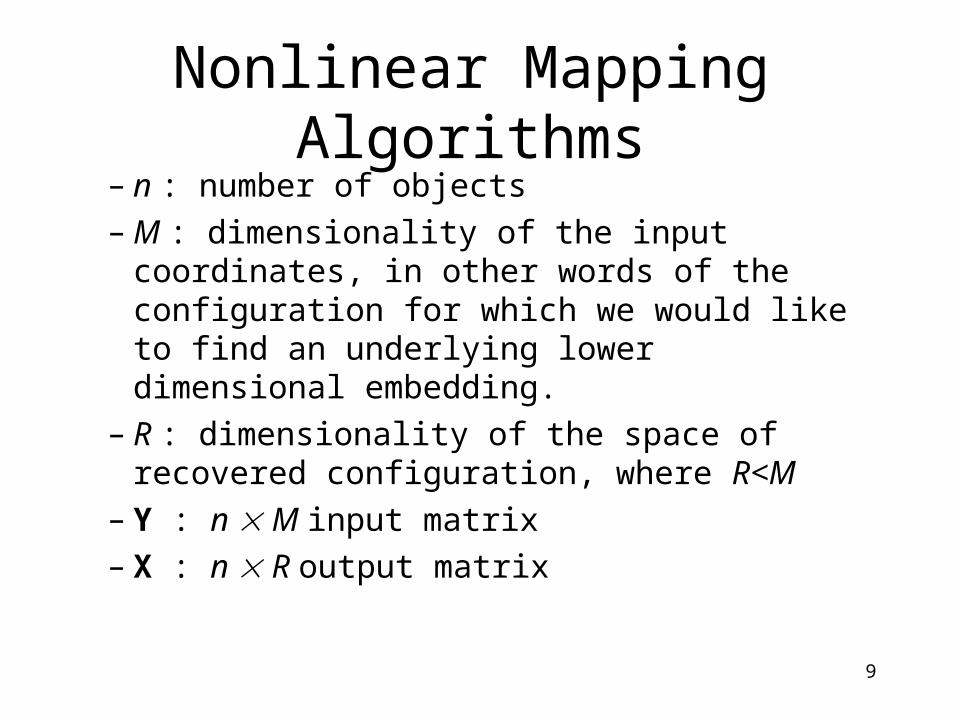
Nonlinear Mapping Algorithms– n : number of objects– M : dimensionality of the input coordinates, in
other words of the configuration for which we would like to find an underlying lower dimensional embedding.
– R : dimensionality of the space of recovered configuration, where R<M
– Y : n M input matrix– X : n R output matrix

10
– The distances between point i and point j in the input and output spaces respectively are calculated as:
[ ij ]D [ dij ]
jixxd
jiyy
R
rjririj
M
mjmimij
, ,)(
, ,)(
1
22
1
22
11
Parametric Mapping Approach
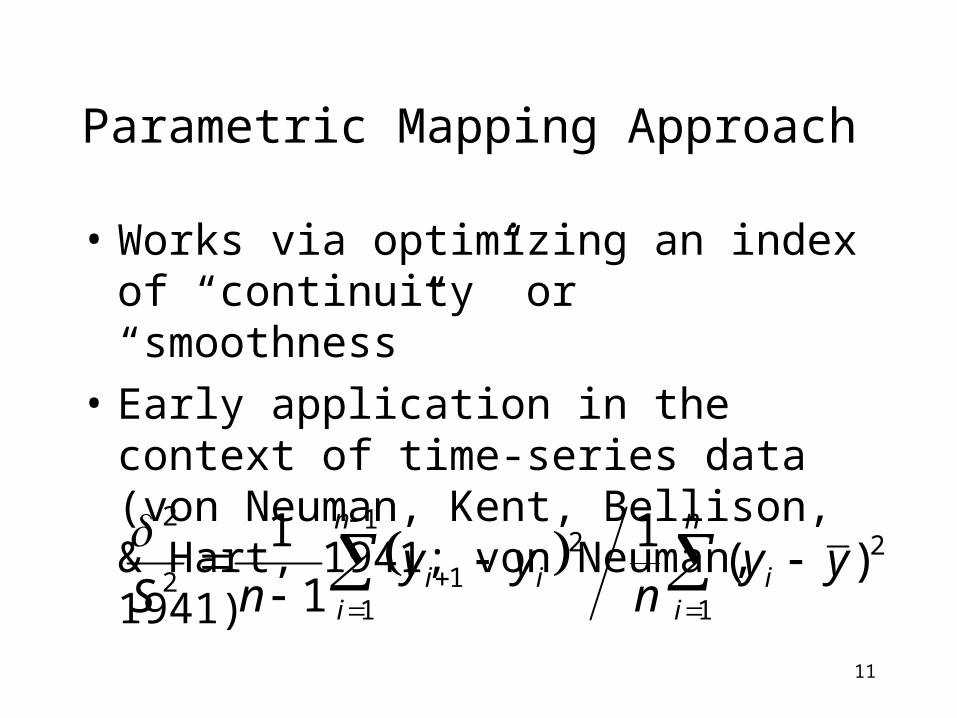
• Works via optimizing an index of “continuity” or “smoothness”
• Early application in the context of time-series data (von Neuman, Kent, Bellison, & Hart, 1941; von Neuman, 1941)
n
ii
n
iii yy
nyy
nS 1
21
1
212
2
)(1
1
1

12
• A more general expression for the numerator is:
• Generalizing to the multidimensional case we reach
21
1
2
1
1
n
i i
i
x
y
n
2
24
21
ji ji ijij
ij
dd
13
• Several modifications needed for the minimization procedure:– d2
ij + Ce2 is substituted for d2ij , C is a constant equal
to 2 / (n - 1) and e takes on values between 0 and 1
– e has a practical effect on accelerating the numerical process
– Can be thought of as an extra “specific” dimension, as e gets closer to 0 points are made to approach “common” part of space
14
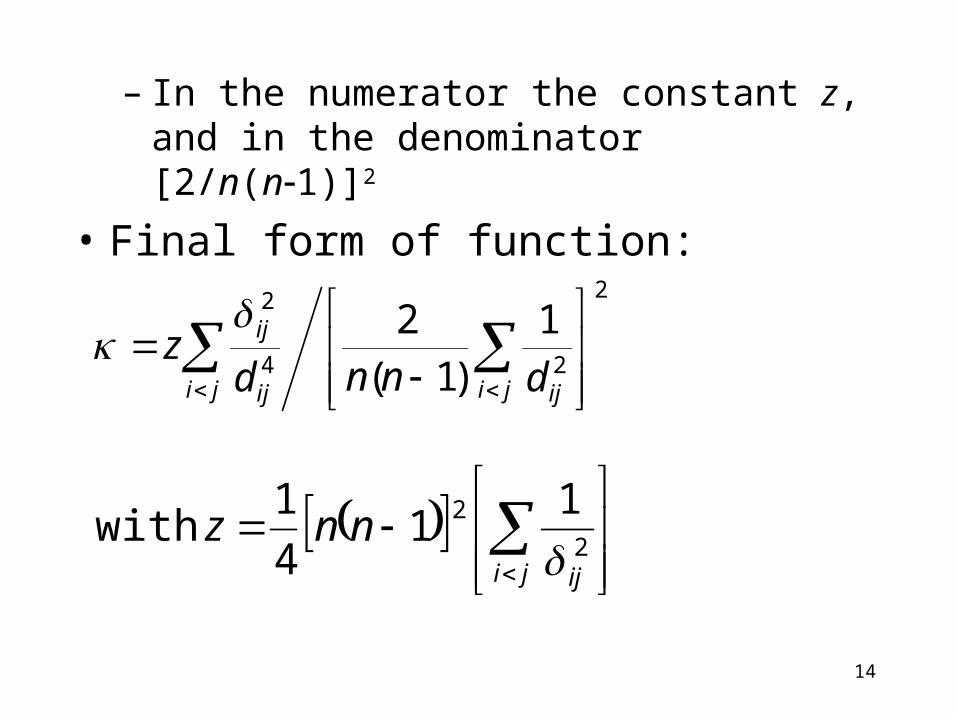
– In the numerator the constant z, and in the denominator [2/n(n1)]2
• Final form of function:
2
24
21
)1(
2
ji ji ijij
ij
dnndz
ji ij
nnz2
2 11
4
1with

15
• Implemented in C++ (GNU-GCC compiler)
• Program takes as input e, number of repetitions, dimensionality R to be recovered, and number of random starts or starting input configuration
• 200 iterations each for 100 different random configurations yields reasonable solutions
• Then this resulting best solution can be further fine tuned by performing more iterations
16
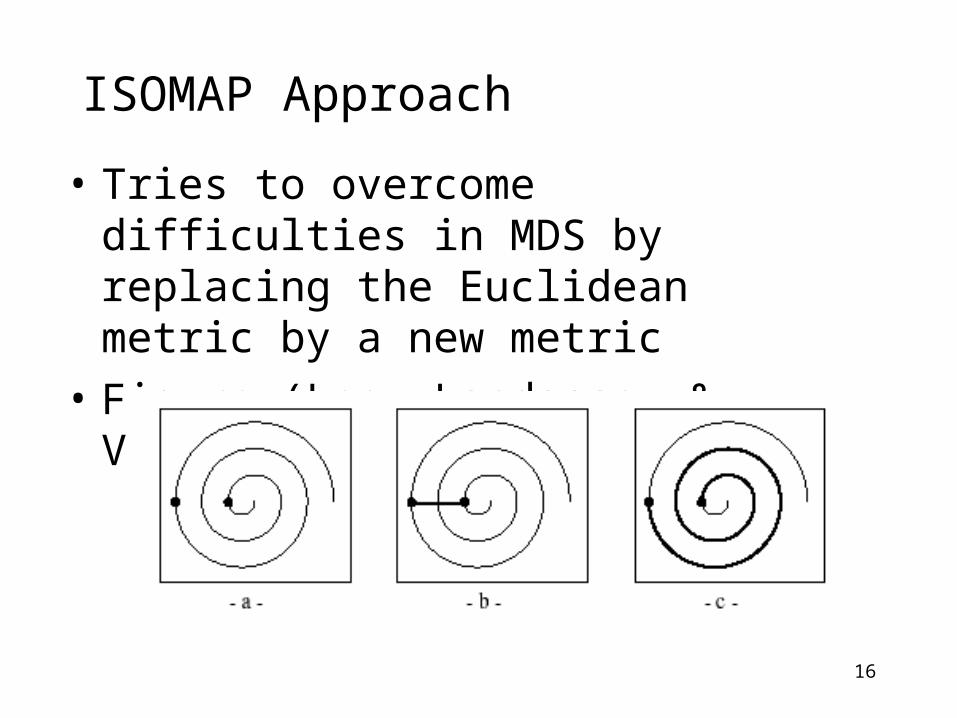
ISOMAP Approach
• Tries to overcome difficulties in MDS by replacing the Euclidean metric by a new metric
• Figure (Lee, Landasse, & Verleysen, 2002)

17
• To approximate the “geodesic” distances ISOMAP constructs a neighborhood graph that connects the closer points – This is done by connecting the k closest neighbors or
points that are close to each other by or less distance
• A shortest path procedure is then applied to the resulting matrix of modified distances
• Finally classical metric MDS is applied to obtain the configuration in the lower dimensionality

18
Other Approaches
• Nonmetric MDS: Minimizes a cost function
• Needed to implement locally monotone MDS approach of Shepard (Shepard & Carroll, 1966)
jiij
jiijij
d
dd
STRESS2
2ˆ
1
jiij
jiijij
dd
dd
STRESS2
2
)(
ˆ
2or
19
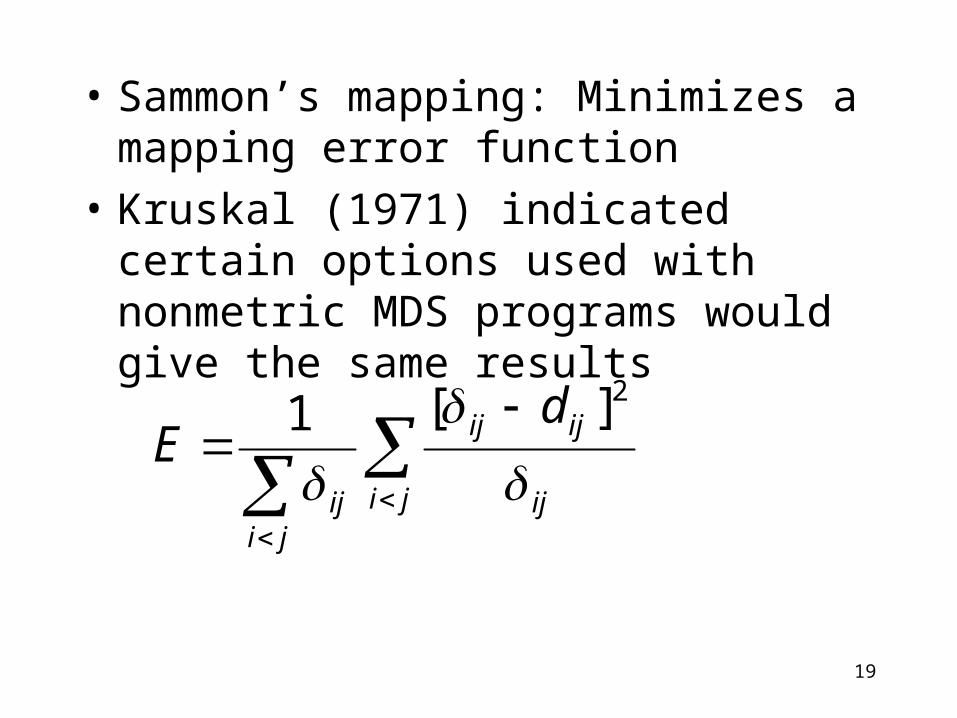
• Sammon’s mapping: Minimizes a mapping error function
• Kruskal (1971) indicated certain options used with nonmetric MDS programs would give the same results
ji ij
ijij
jiij
dE
2][1

20
• Multidimensional scaling by iterative majorization (Webb, 1995)
• Curvilinear Distance Analysis (CDA) (Lee et al., 2002), analogue of ISOMAP, omits the MDS step replacing it by a minimization step
• Self organizing map (SOM) (Kohonen 1990, 1995)
• Auto associative feedforward neural networks (AFN) (Baldi & Hornik, 1989; Kramer, 1991)

21
Experimental Design and Methods
• Primary focus: 62 located at the intersection of 5 equally spaced parallels and 12 equally spaced meridians
• Two types of error A and B – A: 0%, 10%, 20%– B: ±0.00, ±0.01, ±0.05, ±0.10, ±0.20
• Control points being irregularly spaced and being inside or outside the sphere respectively

22

23
• To evaluate mapping performance:We calculate “rate of agreement in local structure”abbreviated “agreement rate” or A– Similar to RAND index used to compare
partitions (Rand, 1971; Hubert & Arabie, 1985)
– Let ai stand for the number of points that are in the k-nearest neighbor list for point i in both X and Y. A will be equal to
knan
ii
1

24
1 2 3 4 5
2 1 1 2 1
3 4 4 3 2
1 2 3 4 5
4 3 2 1 3
5 4 4 5 4
k=2, Agreement rate = 2/10 or 20 %
Example of calculating agreement rate

25
• Problem of similarity transformations: We use standard software to rotate the different solutions into optimal congruence with a landmark solution (Rohlf & Slice 1989)
• We use the solution for the error free and regularly spaced sphere as the landmark
• We report also VAF
R
r
n
iir
R
r
n
iirir
x
xxVAF
1 1
2
1 1
2
)(
)ˆ(1

26
• The VAF results may not be very good
• Similarity transformation step is not enough
• An alternating algorithm is needed that reorders the points on each of the five parallels and then finds the optimal similarity transformation
• We also provide Shepard-like diagrams

27
(a) 0% Type A Error / 0.00 Type B Error
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
23 4
56
7891011
1213
14
15 16
17
18
19
20212223
24
2526
27
28
29
30
31
32333435
36
37
3839
40
41
42
43
444546
47
48
4950 51 52
535455
56575859
6061
62
(b) 0% Type A Error / 0.01 Type B ErrorVAF = 0.47
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
3 4 5 678
91011
1213
14
1516 17 18
19
20
21
2223
24
25
26
27 28 29 30
31
32
33 34
35
36
37
38
39 40 4142
43
44
45
4647
48
49
5051 52 53 54
5556
575859
6061
62
Why similarity transformation is not enough?
28
Results• Agreement rate for the regularly spaced and
errorless sphere 82.9%, k=5
• Over 1000 randomizations of the solution: Average, and standard deviation of the agreement rate 8.1% and 1.9% respectively. Minimum and maximum are 3.5% and 16.7%
29
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25

30
• We can use Chebychev’s inequality stated as:
• 82.9 is about 40 standard deviations away from the mean, an upper bound of the probability that this event happens by chance is 1/402 or 0.000625, very low!
2
1)(
kkZP

31
(a) 0% Type A Error / 0.00 Type B Error
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
23 4
56
7891011
1213
14
15 16
17
18
19
20212223
24
2526
27
28
29
30
31
32333435
36
37
3839
40
41
42
43
444546
47
48
4950 51 52
535455
56575859
6061
62
(b) 0% Type A Error / 0.01 Type B ErrorVAF = 0.47
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
3 4 5 678
91011
1213
14
1516 17 18
19
20
21
2223
24
25
26
27 28 29 30
31
32
33 34
35
36
37
38
39 40 4142
43
44
45
4647
48
49
5051 52 53 54
5556
575859
6061
62
(c) 0% Type A Error / 0.05 Type B ErrorVAF = 0.42
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
2 345
678
91011
12 13
14 15
16
17
18
1920
21
22
23
2425
26 27
2829
30
31
32
33
34
35
36 37
3839
40
41
42
4344
45
46
47
48 49
5051
5253
54555657
5859
60 61
62
(d) 0% Type A Error / 0.10 Type B ErrorVAF = 0.63
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
2 345
6789
101112
13
1415
16
17
18192021
22
23
24
25
26
27
28
29
30
31323334
35
36
37
3839 40
41
42
43444546
47
48
4950 5152
53
5455
56575859
6061
62
(a) (b)
(c) (d)

32
(e) 0% Type A Error / 0.20 Type B ErrorVAF=0.23
-0.20 -0.10 0.00 0.10 0.20-0.20
-0.10
0.00
0.10
0.20
1
2 34
56789
1011
1213
1415
16
17
1819
2021
22
2324
25
26
2728
29
30
31
32
33
34 35 36 37
38
39
40
4142
43
44
45
46 47 48 49
505152535455
56575859 6061
62
(f) 10% Type A Error / 0.00 Type B ErrorVAF = 0.61
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
2 34
5678
9
10
1112
13
14
1516
17
181920
212223
2425
2627
28
29
3031
323334
3536
37
38
39
40
41
4243
44
454647
4849
50
5152
5354
555657
58
59
6061 62
(g) 10% Type A Error / 0.01 Type B ErrorVAF = 0.33
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
34
5 6 7
8
9
101112
13
14 15
16 17 1819 20
2122
23
24
25
26 27 2829
3031
3233
34
35
36
37
38 39
40
41
42
43
44
45
4647
4849
505152
5354
555657 58
5960
61
62
(h) 10% Type A Error / 0.05 Type B ErrorVAF = 0.62
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
2 34
56
789
10
1112
13
14
15
16
17
1819
20212223
24
25
26 2728
29
30
3132
33343536
37
38
39
40
4142
4344
454647
4849
50 5152 5354
555657
5859
606162
(e) (f)
(g) (h)

33
(i) 10% Type A Error / 0.10 Type B ErrorVAF = 0.49
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
23
456
7
8
9
101112
1314
1516 17
1819
20
21222324
252627
28
29
3031
32
3334353637
38
39
40
41
42
43
4445
464748
49
50
5152
5354
5556
57
5859
60
61
62
(j) 10% Type A Error / 0.20 Type B ErrorVAF = 0.27
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12 3
4
56 7
8
9
10
1112 13
1415
16 171819
20
2122
23
24
25
26 27 2829
3031
3233
34
35
36
37
38 39
40
41
42
43
4445
4647
4849
505152
5354
5556
5758
5960
61
62
(k) 20% Type A Error / 0.00 Type B ErrorVAF = 0.37
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
3
4
5
67
8
910
111213
1415
1617
1819
20
21
22
2324
25
2627
2829
30
31
32
33
34
35
36
37
38
3940
4142
43
4445
4647
48
4950 51 5253
54
55
5657
5859
60
6162
(l) 20% Type A Error / 0.01 Type B ErrorVAF = 0.42
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
3
45 6
78
9
10
1112 13
14
15
1617
18
19
20
2122
23 24
25
2627
28
2930
31
32
33
34
35
36
37
38
3940
41
4243
4445
46
47
48
49
50
51
5253 54
55
56
57
5859
6061
62
(i) (j)
(k) (l)

34
(m) 20% Type A Error / 0.05 Type B ErrorVAF = 0.34
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
3
45
6
7
89
10
11
12 13
1415
1617
18 19
20
2122 2324
25
26 27
28
2930
31
32
33
34
35
36
37
383940
41
4243
44
4546
47
48
49
50
51
52
53 54
5556
57
5859
60 61
62
(n) 20% Type A Error / 0.10 Type B ErrorVAF = 0.37
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
3
45
6
7
89
10
11
12
13
14
15
16
17
18 19
20
212223
24
25
26
27
28
2930
31
32
3334
353637
38
3940 41
42
43
4445
46474849
50
51
52
53
54
55
5657
58
596061
62
(o) 20% Type A Error / 0.20 Type B ErrorVAF = 0.36
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
12
3
4 5
6
789
10
11
12
13
14
15
16
17
1819
20
21222324
25
26
27
28
2930
31
3233
34
35
3637
38
39 4041 42
43
4445
46
4748
49 50 5152
53
5455
56
5758
59
60
61 62
(m) (n)
(o)

35

36
(a) 0% Type A Error / 0.00 Type B Error
-0.20 -0.10 0.00 0.10 0.20
-0.20
-0.10
0.00
0.10
0.20
1
23 4
56
7891011
1213
14
15 16
17
18
19
20212223
24
2526
27
28
29
30
31
32333435
36
37
3839
40
41
42
43
444546
47
48
4950 51 52
535455
56575859
6061
62
A=48.1 %
A=82.9%
ISOMAP
PARAMAP

37
(a)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.02 0.04 0.06 0.08 0.1 0.12
recovered distances
orig
inal
dis
tanc
es(b)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.02 0.04 0.06 0.08 0.1 0.12
recovered distances
orig
inal
dis
tanc
es
(c)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
recovered distances
orig
inal
dis
tanc
es
Shepard-like Diagrams

38Agreement rate=ISOMAP 59.7%, PARAMAP 70.5%
SWISS Roll Data – 130 points
39
Discussion and Future Direction
• Disadvantage of PARAMAP: Run time
• Advantage of ISOMAP: Noniterative procedure, can be applied to very large data sets with ease
• Disadvantage of ISOMAP: Bad performance in closed data sets like the sphere

40
• Improvements in computational efficiency of PARAMAP should be explored:– Use of a conjugate gradient algorithm instead of straight
gradient algorithm – Use of conjugate gradient with restarts algorithm– Possible combination of straight gradient and conjugate
gradient approaches
• Improvements that could both benefit ISOMAP and PARAMAP:– A wise selection of landmarks and an interpolation or
extrapolation scheme to recover the rest of the data