1 logic synthesis from concurrent specifications jordi cortadella universitat politecnica de...
Post on 20-Dec-2015
219 views
TRANSCRIPT

11
Logic synthesis from Logic synthesis from concurrent specificationsconcurrent specifications
Jordi CortadellaJordi Cortadella
Universitat Politecnica de CatalunyaUniversitat Politecnica de CatalunyaBarcelona, SpainBarcelona, Spain
In collaboration with M. Kishinevsky,A. Kondratyev, L. Lavagno and A. Yakovlev

22
OutlineOutline
Overview of the synthesis flowOverview of the synthesis flow
SpecificationSpecification
State graph and next-state functionsState graph and next-state functions
State encodingState encoding
Implementability conditionsImplementability conditions
Speed-independent circuitSpeed-independent circuit Complex gatesComplex gates C-element architectureC-element architecture
Review of some advanced topicsReview of some advanced topics

33
Book and synthesis toolBook and synthesis tool
J. Cortadella, M. Kishinevsky, A. Kondratyev,J. Cortadella, M. Kishinevsky, A. Kondratyev,L. Lavagno and A. Yakovlev,L. Lavagno and A. Yakovlev,Logic synthesis for asynchronousLogic synthesis for asynchronouscontrollers and interfaces,controllers and interfaces,Springer-Verlag, 2002Springer-Verlag, 2002
petrify:petrify:http://www.lsi.upc.es/petrifyhttp://www.lsi.upc.es/petrify

44
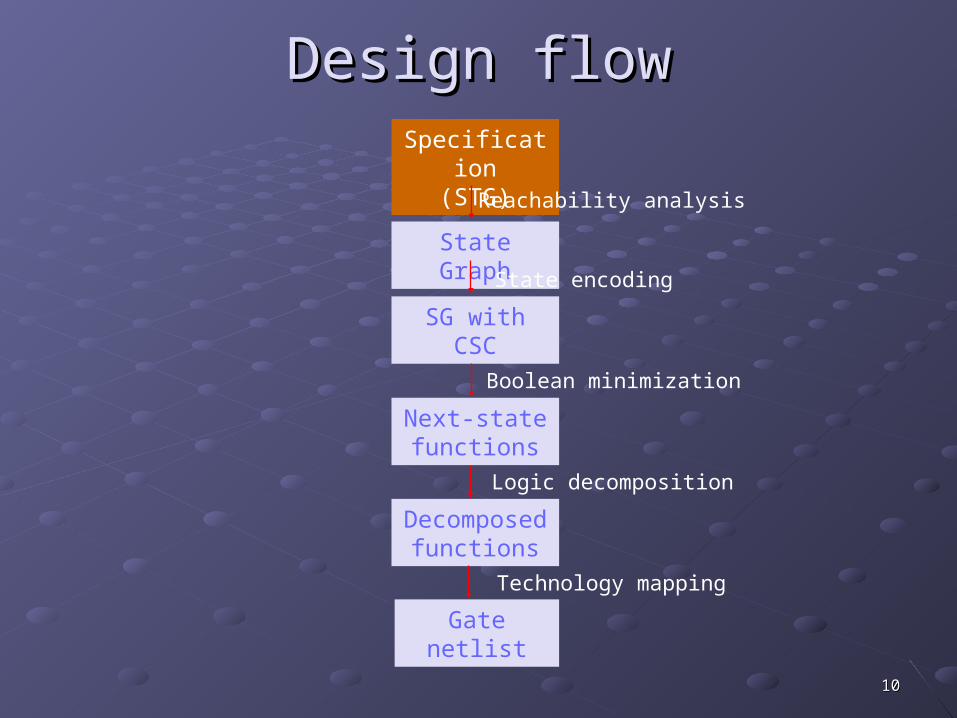
Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
Design flowDesign flow

55
x
y
z
x+
x-
y+
y-
z+
z-
Signal Transition Graph (STG)
xy
z
SpecificationSpecification

66
x
y
z
x+
x-
y+
y-
z+
z-
Token flowToken flow

77
x+
x-
y+
y-
z+
z-
xyz000
x+
100y+z+
z+y+
101 110
111
x-
x-
001
011y+
z-
010
y-
State graphState graph

88
x z x y ( )
y z x
z x y z
Next-state functionsNext-state functionsxyz000
x+
100y+z+
z+y+
101 110
111
x-
x-
001
011y+
z-
010
y-

99
x
z
y
Gate netlistGate netlist
x z x y ( )
y z x
z x y z
1010
Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
Design flowDesign flow

1111
VME busVME bus
DeviceLDS
LDTACK
D
DSr
DSw
DTACK
VME BusController
DataTransceiver
BusDSr
LDS
LDTACK
D
DTACK
Read Cycle

1212
STG for the READ cycleSTG for the READ cycle
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
LDS
LDTACK
D
DSr
DTACK
VME BusController

1313
Choice: Read and Write cyclesChoice: Read and Write cycles
DSr+
LDS+
LDTACK+
D+
DTACK+
DSr-
D-
DTACK-
LDS-
LDTACK-
DSw+
D+
LDS+
LDTACK+
D-
DTACK+
DSw-
DTACK-
LDS-
LDTACK-

1414
Choice: Read and Write cyclesChoice: Read and Write cycles
DTACK-
DSr+
LDS+
LDTACK+
D+
DTACK+
DSr-
D-
LDS-
LDTACK-
DSw+
D+
LDS+
LDTACK+
D-
DTACK+
DSw-

1515
CircuitCircuit synthesissynthesis
Goal:Goal: Derive a hazard-free circuitDerive a hazard-free circuit
under a given delay model andunder a given delay model andmode of operationmode of operation

1616
Speed independenceSpeed independence
Delay modelDelay model Unbounded gate / environment delaysUnbounded gate / environment delays Certain wire delays shorter than certain paths in the Certain wire delays shorter than certain paths in the
circuitcircuit
Conditions for implementability:Conditions for implementability: ConsistencyConsistency Complete State CodingComplete State Coding PersistencyPersistency

1717
Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
Design flowDesign flow

1818
STG for the READ cycleSTG for the READ cycle
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
LDS
LDTACK
D
DSr
DTACK
VME BusController

1919
Binary encoding of signalsBinary encoding of signals
DSr+
DSr+
DSr+
DTACK-
DTACK-
DTACK-
LDS-LDS-LDS-
LDTACK- LDTACK- LDTACK-
D-
DSr-DTACK+
D+
LDTACK+
LDS+

2020
Binary encoding of signalsBinary encoding of signals
DSr+
DSr+
DSr+
DTACK-
DTACK-
DTACK-
LDS-LDS-LDS-
LDTACK- LDTACK- LDTACK-
D-
DSr-DTACK+
D+
LDTACK+
LDS+
10000
10010
10110 01110
01100
0011010110
(DSr , DTACK , LDTACK , LDS , D)

2121
QR (LDS+)QR (LDS+)
QR (LDS-)QR (LDS-)
Excitation / Quiescent RegionsExcitation / Quiescent Regions
ER (LDS+)ER (LDS+)
ER (LDS-)ER (LDS-)
LDS-LDS-
LDS+
LDS-

2222
Next-state functionNext-state function
0 1
LDS-LDS-
LDS+
LDS-
1 0
0 0
1 1
1011010110

2323
Karnaugh map for LDSKarnaugh map for LDS
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
LDS = 0 LDS = 1
0 1-0
0 0 0 0 0 0/1?
1
111
-
-
-
---
- - - -
-
- ---
- - -

2424
Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
Design flowDesign flow

2525
Concurrency reductionConcurrency reduction
LDS-LDS-
LDS+
LDS-
1011010110
DSr+
DSr+
DSr+

2626
Concurrency reductionConcurrency reduction
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+

2727
State encoding conflictsState encoding conflicts
LDS-
LDTACK-
LDTACK+
LDS+
10110
10110

2828
Signal InsertionSignal Insertion
LDS-
LDTACK-
D-
DSr-
LDTACK+
LDS+
CSC-
CSC+
101101
101100

2929
Specification(STG)
State Graph
SG withCSC
Next-state functions
Decomposed functions
Gate netlist
Reachability analysis
State encoding
Boolean minimization
Logic decomposition
Technology mapping
Design flowDesign flow

3030
Complex-gate implementationComplex-gate implementation
)(csccsc
csc
csc
LDTACKDSr
LDTACKD
DDTACK
DLDS

3131
Implementability conditionsImplementability conditions
ConsistencyConsistency Rising and falling transitions of each signal Rising and falling transitions of each signal
alternate in any tracealternate in any trace
Complete state coding (CSC)Complete state coding (CSC) Next-state functions correctly definedNext-state functions correctly defined
PersistencyPersistency No event can be disabled by another event No event can be disabled by another event
(unless they are both inputs)(unless they are both inputs)

3232
Implementability conditionsImplementability conditions
Consistency + CSC + persistencyConsistency + CSC + persistency
There exists a speed-independent circuit There exists a speed-independent circuit that implements the behavior of the STGthat implements the behavior of the STG
(under the assumption that ay Boolean function (under the assumption that ay Boolean function can be implemented with one complex gate)can be implemented with one complex gate)

3333
PersistencyPersistency
100 000 001a- c+
b+ b+
a
cb
a
c
b
is this a pulse ?
Speed independence glitch-free output behavior under any delay

a+
b+
c+
d+
a-
b-
d-
a+
c-a-
0000
1000
1100
0100
0110
0111
1111
1011
0011 1001
0001
a+
b+
c+
a-
b-
c-
a+
c-
a-
a-
d-d+

0000
1000
1100
0100
0110
0111
1111
1011
0011 1001
0001
a+
b+
c+
a-
b-
c-
a+
c-
a-
a-
d-d+
abcd 00 01 11 10
00
01
11
10 1
1 1 11
10
0 000
ER(d+)
ER(d-)

abcd 00 01 11 10
00
01
11
10 1
1 1 11
10
0 000
adcd
0000
1000
1100
0100
0110
0111
1111
1011
0011 1001
0001
a+
b+
c+
a-
b-
c-
a+
c-
a-
a-
d-d+
Complex gate

3737
Implementation with C elementsImplementation with C elements
CR
S z
• • • S+ z+ S- R+ z- R- • • •
• S (set) and R (reset) must be mutually exclusive
• S must cover ER(z+) and must not intersect ER(z-) QR(z-)
• R must cover ER(z-) and must not intersect ER(z+) QR(z+)

abcd 00 01 11 10
00
01
11
10 1
1 1 11
10
0 000
0000
1000
1100
0100
0110
0111
1111
1011
0011 1001
0001
a+
b+
c+
a-
b-
c-
a+
c-
a-
a-
d-d+
CS
Rdc
ca

abcd 00 01 11 10
00
01
11
10 1
1 1 11
10
0 000
0000
1000
1100
0100
0110
0111
1111
1011
0011 1001
0001
a+
b+
c+
a-
b-
c-
a+
c-
a-
a-
d-d+
CS
Rdc
cba
Monotonic covers

4242
C-based implementationsC-based implementations
CS
Rdc
cbaC
d
ab
c
a
b
cd
weak
a
cd
generalized C elements (gC)
weak

4343
Speed-independent Speed-independent implementationsimplementations
Implementability conditionsImplementability conditions ConsistencyConsistency Complete state codingComplete state coding PersistencyPersistency
Circuit architecturesCircuit architectures Complex (hazard-free) gatesComplex (hazard-free) gates C elements with monotonic coversC elements with monotonic covers ......

4444
Synthesis exerciseSynthesis exercisey-
z- w-
y+ x+
z+
x-
w+
1011
0111
0011
1001
1000
1010
0001
0000 0101
0010 0100
0110
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
Derive circuits for signals x and z (complex gates and monotonic covers)

4545
Synthesis exerciseSynthesis exercise1011
0111
0011
1001
1000
1010
0001
0000 0101
0010 0100
0110
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
wxyz 00 01 11 10
00
01
11
10
-
-
-
-
Signal x
1
0
1
1
1
1
1
0 0
0
0
0

4646
Synthesis exerciseSynthesis exercise1011
0111
0011
1001
1000
1010
0001
0000 0101
0010 0100
0110
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
wxyz 00 01 11 10
00
01
11
10
-
-
-
-
Signal z
1
0 0
0
0
11 1
0
0 0
0

4747
y-
z- w-
y+ x+
z+
x-
w+
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
Logic decomposition: exampleLogic decomposition: example

4848
yz=1yz=0
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
1001 1011
1000
1010
0001
0000 0101
0010 0100
0110 0111
0011
y-
y+
x-
x+w+
w-
z+
z-
w-
w-
z-
z-y+
y+
x+
x+
C
C
x
y
x
y
w
z
xyz
y
zw
z
w
z
y
Logic decomposition: exampleLogic decomposition: example

4949
s-
s+
s-
s-
s=1
s=0
1001 1011
1000
1010
0111
0011y+
x-
w+
z+
z-
0001
0000 0101
0010 0100
0110
x+
w-
w-
w-
z-
z-y+
y+
x+
x+
1001
1000
1010
y+
z-
0111
C
C
x
y
x
y
w
z
x
y
z
w
z
w
z
y
sy-
Logic decomposition: exampleLogic decomposition: example

5050
y-
z- w-
y+ x+
z+
x-
w+
s-
s+
s-
s+
s-
s-
s=1
s=0
1001 1011
1000
1010
0111
0011y+
x-
w+
z+
z-
0001
0000 0101
0010 0100
0110
x+
w-
w-
w-
z-
z-y+
y+
x+
x+
1001
1000
1010
y+
z-
0111
y-
Logic decomposition: exampleLogic decomposition: example

5151
Speed-independent NetlistSpeed-independent Netlist
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
DTACKD
DSr
LDS
LDTACK
csc
map

5252
Adding timing assumptions Adding timing assumptions
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
DTACKD
DSr
LDS
LDTACK
csc
map
LDTACK- before DSr+
FAST
SLOW

5353
Adding timing assumptionsAdding timing assumptions
DTACKD
DSr
LDS
LDTACK
csc
map
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
LDTACK- before DSr+

5454
State space domainState space domain
LDTACK- before DSr+
LDTACK-
DSr+

5555
State space domainState space domain
LDTACK- before DSr+
LDTACK-
DSr+

5656
State space domainState space domain
LDTACK- before DSr+
LDTACK-
DSr+
Two more unreachable states

5757
Boolean domainBoolean domain
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
LDS = 0 LDS = 1
0 1-0
0 0 0 0 0 0/1?
1
111
-
-
-
---
- - - -
-
- ---
- - -

5858
Boolean domainBoolean domain
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
DTACKDSrD
LDTACK 00 01 11 10
00
01
11
10
LDS = 0 LDS = 1
0 1-0
0 0 - 0 0 1
1
111
-
-
-
---
- - - -
-
- ---
- - -
One more DC vector for all signals One state conflict is removed

5959
Netlist with one constraintNetlist with one constraint
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
DTACKD
DSr
LDS
LDTACK
csc
map

6060
Netlist with one constraintNetlist with one constraint
LDS+ LDTACK+ D+ DTACK+ DSr- D-
DTACK-
LDS-LDTACK-
DSr+
DTACK D
DSr LDS
LDTACK
LDTACK- before DSr+
TIMING CONSTRAINT

6161
ConclusionsConclusions
STGs have a high expressiveness power at a low level STGs have a high expressiveness power at a low level of granularity (similar to FSMs for synchronous systems)of granularity (similar to FSMs for synchronous systems)
Synthesis from STGs can be fully automatedSynthesis from STGs can be fully automated
Synthesis tools often suffer from the state explosion Synthesis tools often suffer from the state explosion problem (symbolic techniques are used)problem (symbolic techniques are used)
The theory of logic synthesis from STGs can be found in:The theory of logic synthesis from STGs can be found in:
J. Cortadella, M. Kishinevsky, A. Kondratyev, L. Lavagno and A. Yakovlev,J. Cortadella, M. Kishinevsky, A. Kondratyev, L. Lavagno and A. Yakovlev,Logic Synthesis of Asynchronous Controllers and InterfacesLogic Synthesis of Asynchronous Controllers and Interfaces ,,Springer Verlag, 2002.Springer Verlag, 2002.