z plane
TRANSCRIPT

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 1/59
Z-Plane Analysis
DR. Wajiha Shah
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 2/59
Content Introduction
z -Transform
Zeros and Poles
Region of Convergence
Important z -Transform Pairs Inverse z -Transform
z -Transform Theorems and Properties
System Function

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 3/59
The z-Transform
Introduction

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 4/59
Why z-Transform? A generalization of Fourier transform
Why generalize it? – FT does not converge on all sequence
– Notation good for analysis
– Bring the power of complex variable theory deal with
the discrete-time signals and systems
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 5/59
The z-Transform
z-Transform

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 6/59
Definition The z -transform of sequence x(n) is defined by
∑∞
−∞=
−=n
n z n x z X )()(
Let z = e− jω .
( ) ( ) j j n
n
X e x n eω ω
∞−
=−∞
= ∑
Fourier
Transform

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 7/59
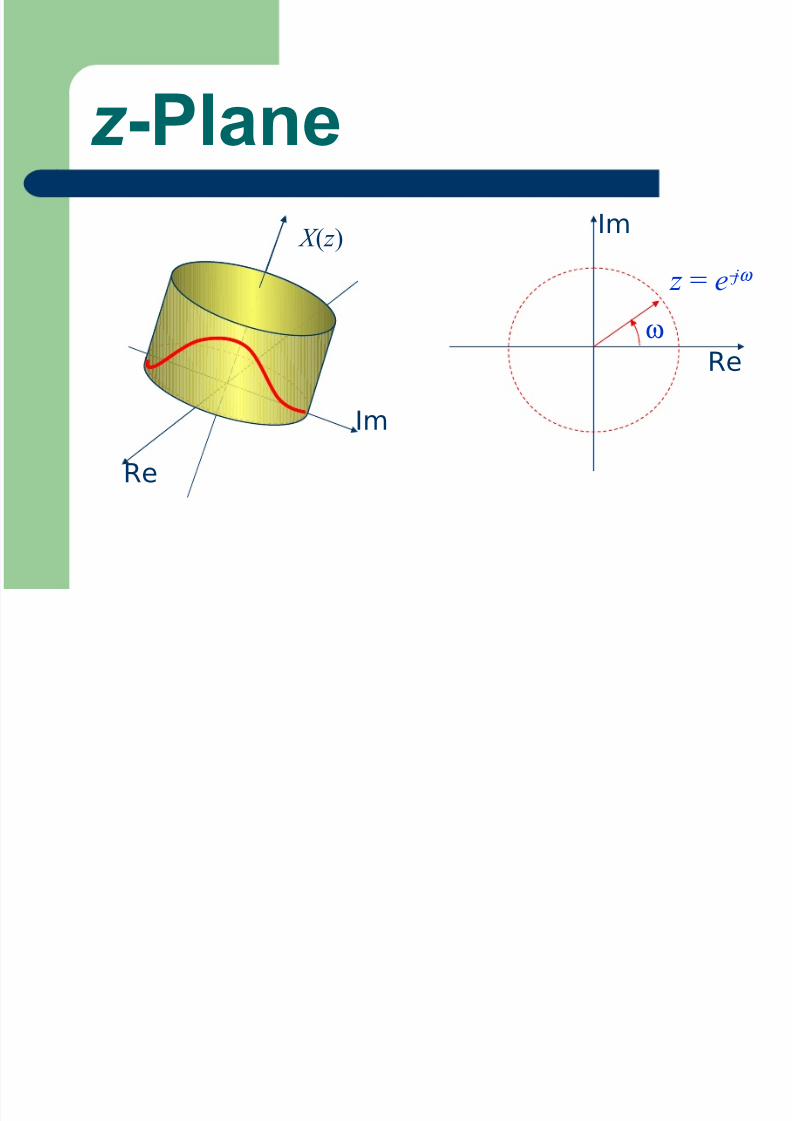
z -Plane
Re
Im
z = e− jω
ω∑
∞
−∞=
−=n
n z n x z X )()(
( ) ( )
j j n
n X e x n e
ω ω
∞−
=−∞= ∑Fourier Transform is to evaluate z-transform
on a unit circle.
Fourier Transform is to evaluate z-transform
on a unit circle.
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 8/59
z -Plane
Re
Im
X ( z )
Re
Im
z = e− jω
ω

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 9/59
Periodic Property of FT
Re
Im
X ( z )
π−π ω
X (e jω)
Can you say why Fourier Transform is
a periodic function with period 2π?
Can you say why Fourier Transform is
a periodic function with period 2π?

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 10/59
z-Plane Analysis
Zeros and Poles

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 11/59
DefinitionGive a sequence, the set of values of z for which the
z -transform converges, i.e., | X ( z )|<∞, is called theregion of convergence.
∞<== ∑∑
∞
−∞=
−∞
−∞=
−
n
n
n
n z n x z n x z X |||)(|)(|)(|
ROC is centered on origin and
consists of a set of rings.
ROC is centered on origin and
consists of a set of rings.
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 12/59
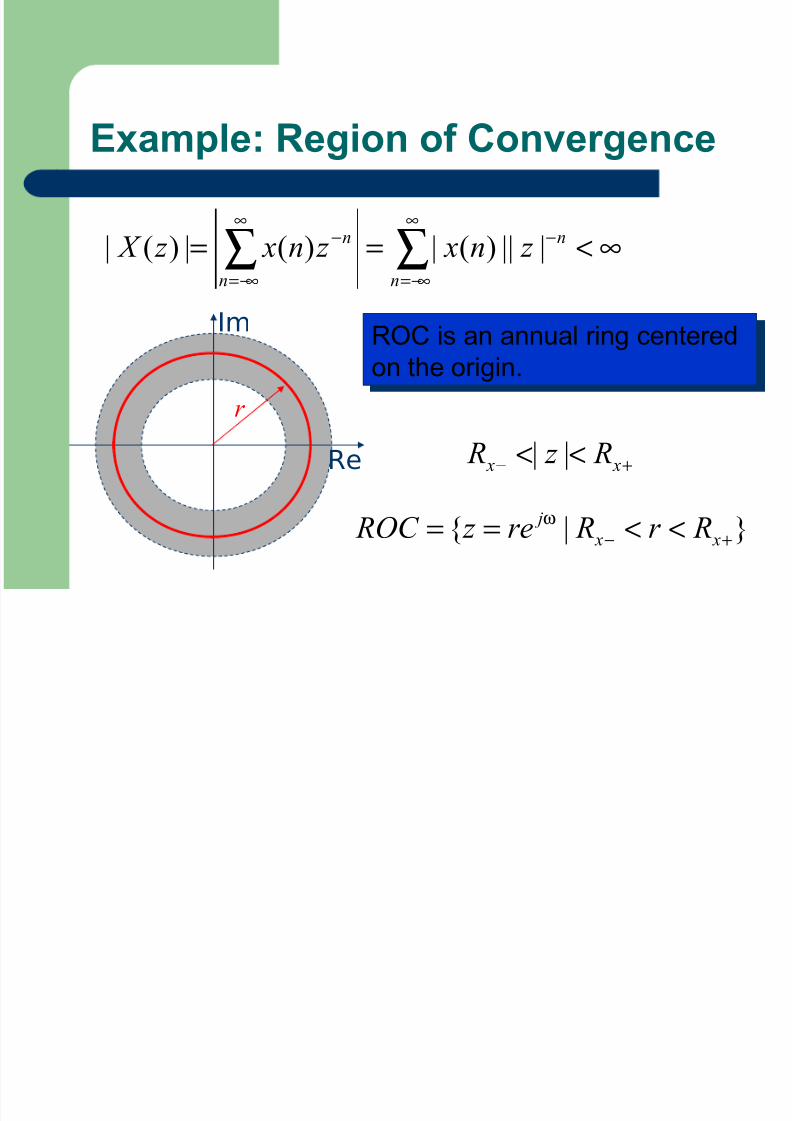
Example: Region of Convergence
Re
Im
∞<== ∑∑∞
−∞=
−∞
−∞=
−
n
n
n
n z n x z n x z X |||)(|)(|)(|
ROC is an annual ring centered
on the origin.
ROC is an annual ring centered
on the origin.
+− << x x R z R ||r
}|{ +−
ω <<== x x
j Rr Rre z ROC

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 13/59
Stable Systems
Re
Im
1
A stable system requires that its Fourier transform is
uniformly convergent. Fact: Fourier transform is to
evaluate z -transform on a unit
circle.
A stable system requires the
ROC of z -transform to include
the unit circle.

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 14/59
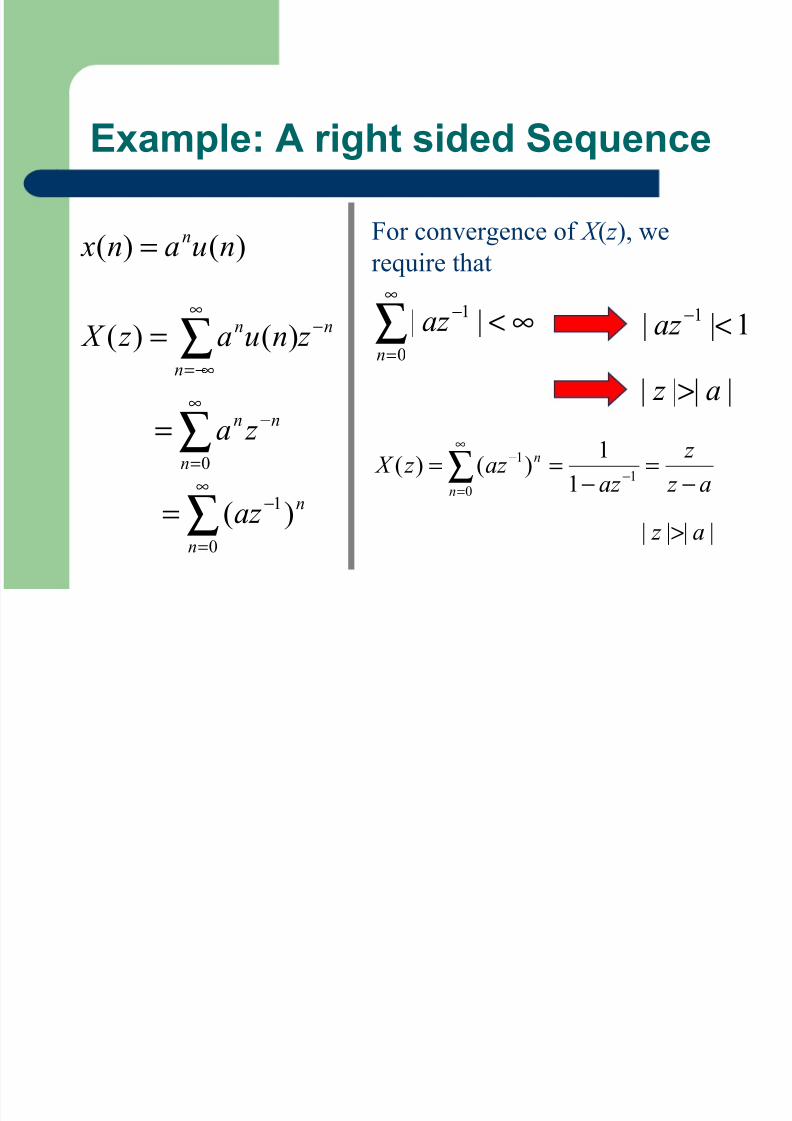
Example: A right sided Sequence
)()( nuan x n=
1 2 3 4 5 6 7 8 9 10-1-2-3-4-5-6-7-8
n
x(n)
. . .
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 15/59
Example: A right sided Sequence
)()( nuan x n=
n
n
n z nua z X −∞
−∞=∑= )()(
∑∞
=
−=0n
nn z a
∑∞
=
−=0
1)(
n
naz
For convergence of X ( z ), we
require that
∞<∑∞
=
−
0
1 ||n
az 1|| 1 <−az
|||| a z >
a z
z
az az z X
n
n
−=
−== −
∞
=
−∑ 10
1
1
1)()(
|||| a z >

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 16/59
a− a
Example: A right sided Sequence
ROC for x(n)=anu(n)
|||| ,)( a z a z
z z X >
−
=
Re
Im
1 a− a
Re
Im
1
Which one is stable?Which one is stable?
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 17/59
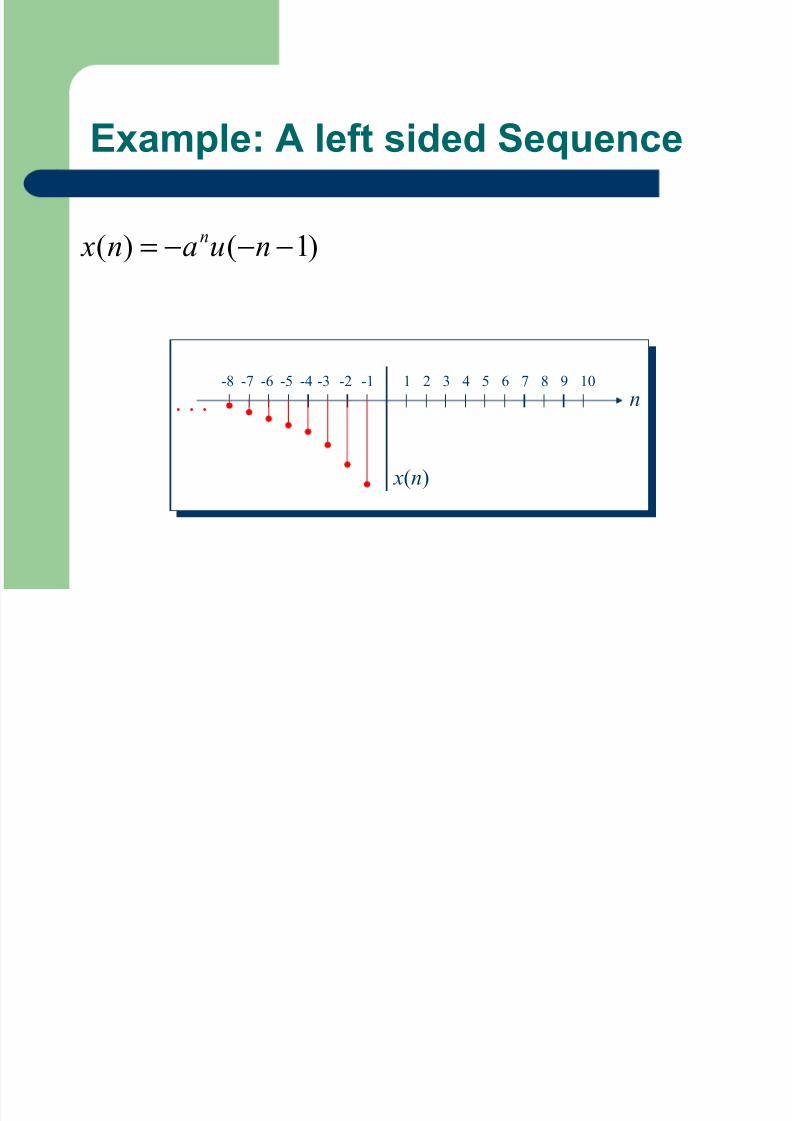
Example: A left sided Sequence
)1()( −−−= nuan x n
1 2 3 4 5 6 7 8 9 10-1-2-3-4-5-6-7-8
n
x(n)
. . .
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 18/59
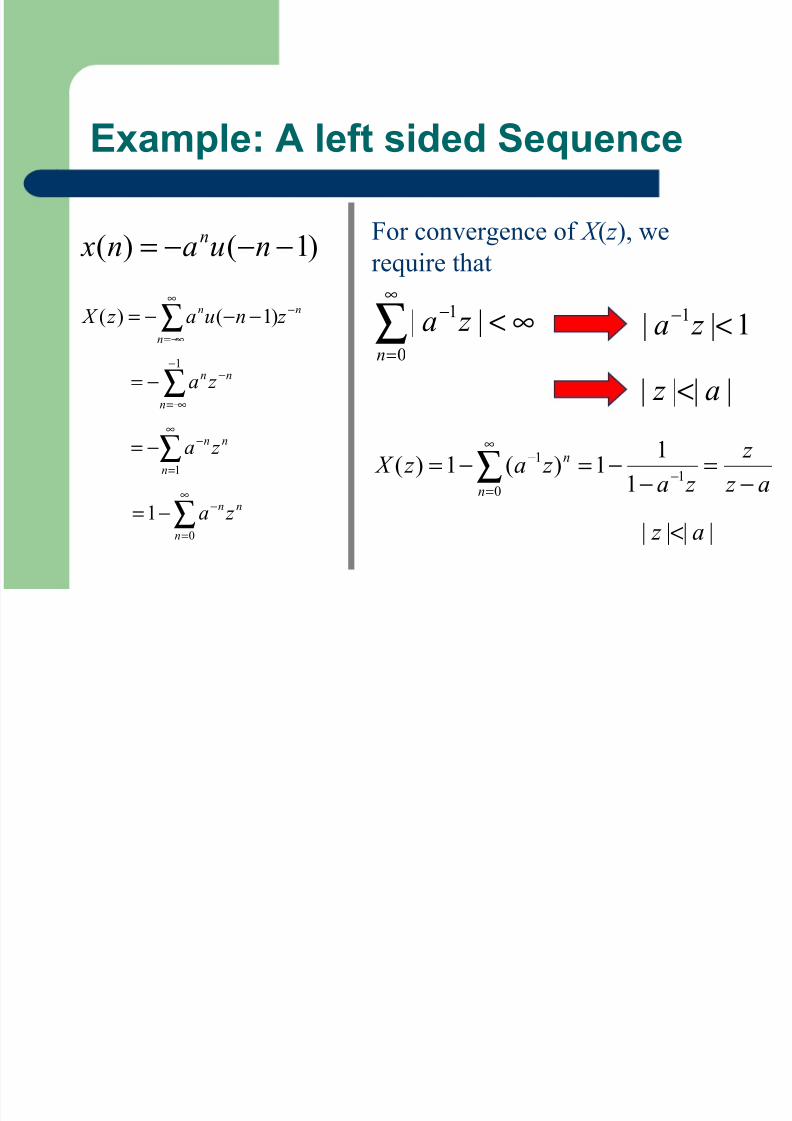
Example: A left sided Sequence
)1()( −−−= nuan x n
n
n
n z nua z X −∞
−∞=
∑ −−−= )1()(
For convergence of X ( z ), we
require that
∞<∑∞
=
−
0
1 ||n
z a 1|| 1 <− z a
|||| a z <
a z
z
z a z a z X
n
n
−=
−−=−= −
∞
=
−∑ 10
1
1
11)(1)(
|||| a z <
n
n
n z a −−
−∞=∑−=
1
n
n
n z a∑∞
=
−−=1
n
n
n z a∑∞
=
−−=0
1
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 19/59
a− a
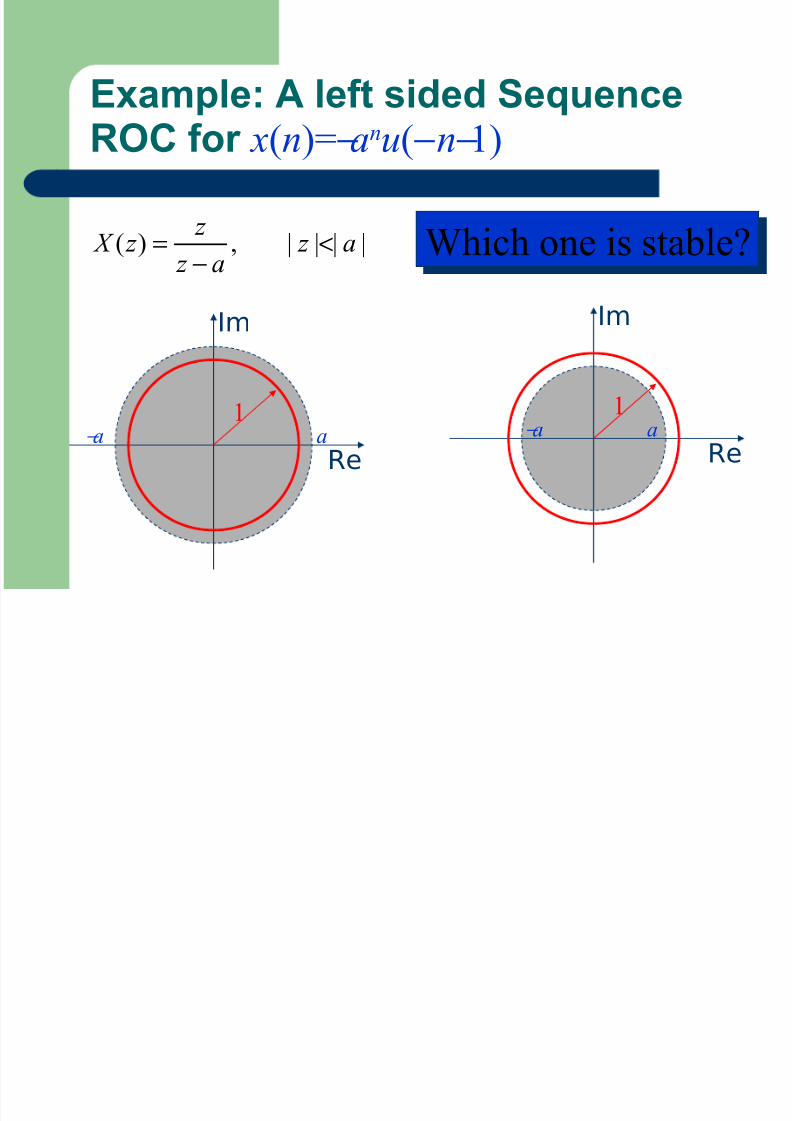
Example: A left sided Sequence
ROC for x(n)=−anu(− n−1)
|||| ,)( a z a z
z z X <
−
=
Re
Im
1 a− a
Re
Im
1
Which one is stable?Which one is stable?

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 20/59
The z-Transform
Region of
Convergence

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 21/59
Represent z -transform as a
Rational Function
)(
)(
)( z Q
z P
z X =where P ( z ) and Q( z ) are
polynomials in z .
Zeros: The values of z ’s such that X ( z ) = 0
Poles: The values of z ’s such that X ( z ) = ∞

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 22/59
Example: A right sided Sequence
)()( nuan x n= |||| ,)( a z
a z
z z X >
−
=
Re
Im
a
ROC is bounded by the
pole and is the exterior of a circle.

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 23/59
Example: A left sided Sequence
)1()( −−−= nuan x n|||| ,)( a z
a z
z z X <
−
=
Re
Im
a
ROC is bounded by the
pole and is the interior of a circle.

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 24/59
Example: Sum of Two Right Sided Sequences
)()()()()(31
21 nunun x nn −+=
31
21
)(+
+−
= z
z
z
z z X
Re
Im
1/2
))((
)(2
31
21
121
+−−= z z
z z
−1/3
1/12
ROC is bounded by poles
and is the exterior of a circle.
ROC does not include any pole.

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 25/59
Example: A Two Sided Sequence
)1()()()()(21
31 −−−−= nunun x nn
21
31
)(−
++
= z
z
z
z z X
Re
Im
1/2
))((
)(2
21
31
121
−+−= z z
z z
−1/3
1/12
ROC is bounded by poles and is a ring.
ROC does not include any pole.

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 26/59
Example: A Finite Sequence
10 ,)( −≤≤= N nan x n
n N
n
n N
n
n z a z a z X )()( 11
0
1
0
−−
=
−−
=∑∑ ==
Re
Im
ROC: 0 < z < ∞
ROC does not include any pole.
1
1
1
)(1−
−
−
−=
az
az N
a z
a z
z
N N
N −−= −1
1
N -1 poles
N -1 zeros
Always StableAlways Stable

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 27/59
Properties of ROC
A ring or disk in the z-plane centered at the origin.
The Fourier Transform of x(n) is converge absolutely iff the ROC
includes the unit circle. The ROC cannot include any poles
Finite Duration Sequences: The ROC is the entire z -plane except
possibly z =0 or z =∞.
Right sided sequences: The ROC extends outward from the outermost
finite pole in X ( z ) to z =∞.
Left sided sequences: The ROC extends inward from the innermost
nonzero pole in X ( z ) to z =0.

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 28/59
More on Rational z -Transform
Re
Im
a b c
Consider the rational z -transform
with the pole pattern:
Find the possibleROC’sFind the possibleROC’s
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 29/59
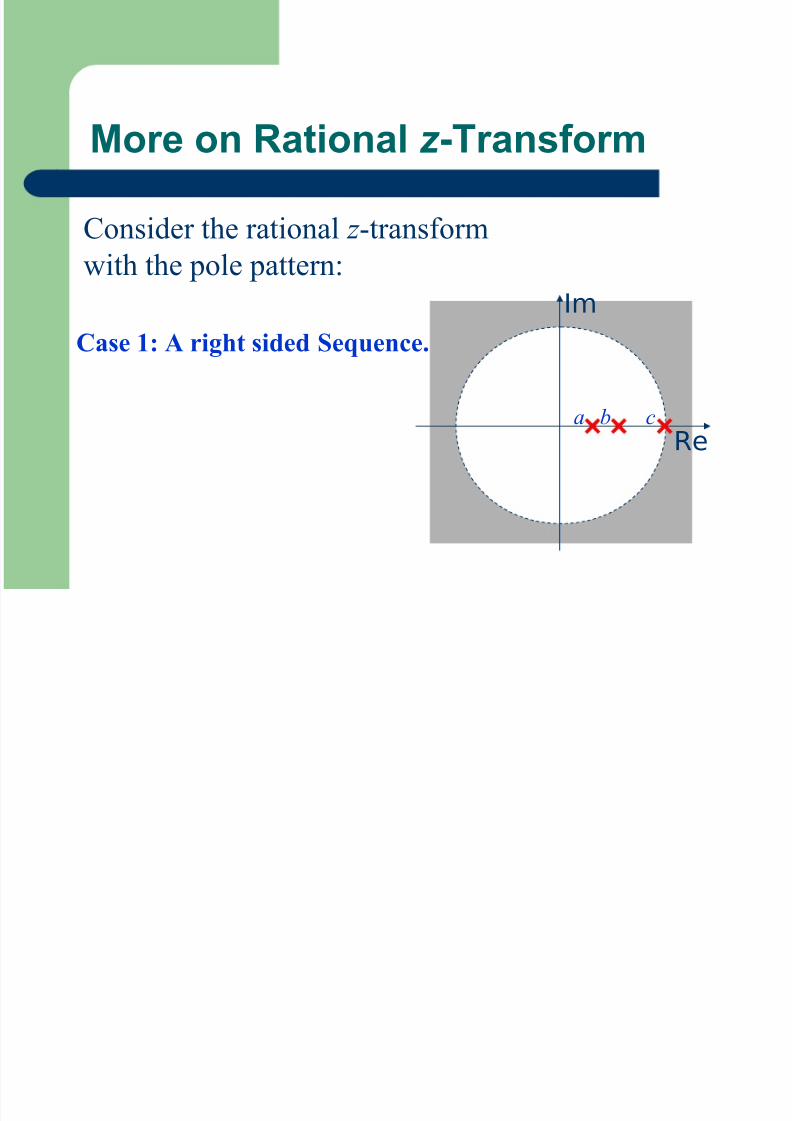
More on Rational z -Transform
Re
Im
a b c
Consider the rational z -transform
with the pole pattern:
Case 1: A right sided Sequence.
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 30/59
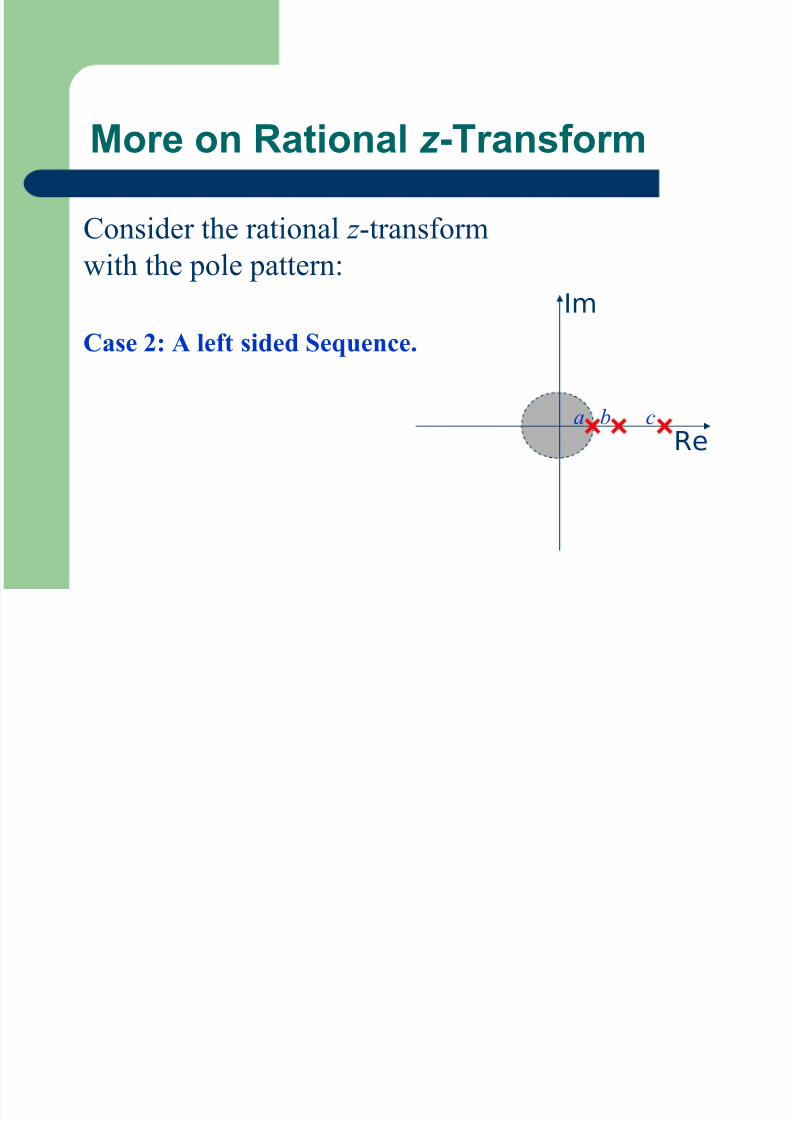
More on Rational z -Transform
Re
Im
a b c
Consider the rational z -transform
with the pole pattern:
Case 2: A left sided Sequence.

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 31/59
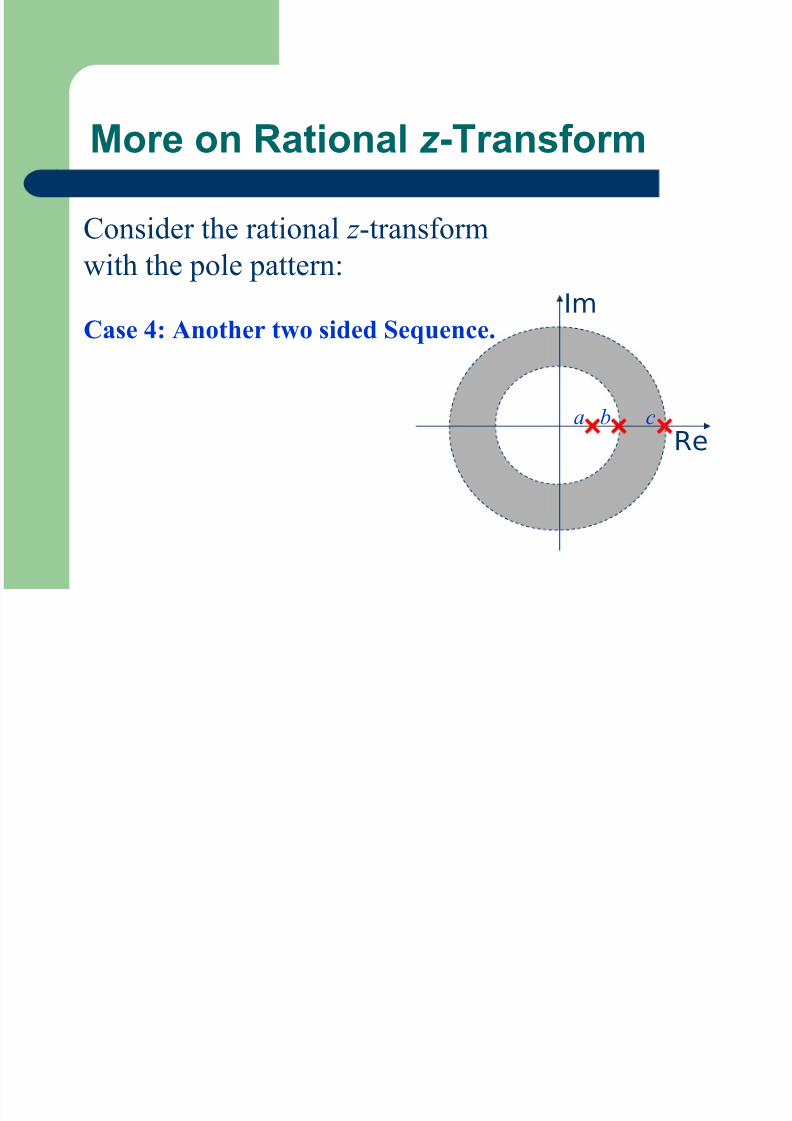
More on Rational z -Transform
Re
Im
a b c
Consider the rational z -transform
with the pole pattern:
Case 3: A two sided Sequence.
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 32/59
More on Rational z -Transform
Re
Im
a b c
Consider the rational z -transform
with the pole pattern:
Case 4: Another two sided Sequence.
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 33/59
The z-Transform
Important
z -Transform Pairs

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 34/59
Z-Transform Pairs
Sequence z -Transform ROC
)(nδ 1 All z
)( mn −δ m z − All z except 0 (if m>0)
or ∞ (if m<0)
)(nu 11
1−− z
1|| > z
)1( −−− nu1
1
1−
− z 1|| < z
)(nua n 11
1−− az
|||| a z >
)1( −−− nua
n 1
1
1−
− az
|||| a z <

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 35/59
Z-Transform Pairs
Sequence z -Transform ROC
)(][cos 0 nunω 21
0
1
0
]cos2[1
][cos1−−
−
+ω−
ω−
z z
z 1|| > z
)(][sin 0 nunω 21
0
1
0
]cos2[1
][sin−−
−
+ω−ω
z z
z 1|| > z
)(]cos[ 0 nunr n ω 221
0
1
0
]cos2[1
]cos[1−−
−
+ω−
ω−
z r z r
z r r z >||
)(]sin[ 0 nunr n ω 221
0
1
0
]cos2[1
]sin[−−
−
+ω−ω
z r z r
z r r z >||
−≤≤
otherwise0
10 N nan
11
1−
−
−−
az
z a N N
0|| > z

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 36/59
The z-Transform
Inverse z -Transform

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 37/59
The z-Transform
z -Transform Theorems
and Properties

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 38/59
Linearity x R z z X n x ∈= ),()]([Z
y R z z Y n y ∈= ),()]([Z
y x R R z z bY z aX nbynax ∩∈+=+ ),()()]()([Z
Overlay of
the above two
ROC’s

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 39/59
Shift x R z z X n x ∈= ),()]([Z
x
n R z z X z nn x ∈=+ )()]([ 0
0Z

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 40/59
Multiplication by an Exponential Sequence
+<<= x x- R z R z X n x || ),()]([Z
x
n Ra z z a X n xa ⋅∈= − || )()]([ 1Z

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 41/59
Differentiation of X (z )
x R z z X n x ∈= ),()]([Z
x R z dz
z dX z nnx ∈−=
)()]([Z
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 42/59
Conjugation x R z z X n x ∈= ),()]([Z
x R z z X n x ∈= *)(*)](*[Z

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 43/59
Reversal x R z z X n x ∈= ),()]([Z
x R z z X n x /1 )()]([ 1 ∈=− −Z
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 44/59
Real and Imaginary Parts
x R z z X n x ∈= ),()]([Z
x R z z X z X n xe ∈+= *)](*)([)]([21R
x jR z z X z X n x ∈−= *)](*)([)]([
21Im

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 45/59
Initial Value Theorem
0for ,0)( <= nn x
)(lim)0( z X x z ∞→
=

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 46/59
Convolution of Sequences
x R z z X n x ∈= ),()]([Z
y R z z Y n y ∈= ),()]([Z
y x R R z z Y z X n yn x ∩∈= )()()](*)([Z

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 47/59
Convolution of Sequences
∑∞
−∞=
−=k
k n yk xn yn x )()()(*)(
∑ ∑∞
−∞=
−∞
−∞=
−=
n
n
k
z k n yk xn yn x )()()](*)([Z
∑ ∑∞
−∞=
−∞
−∞=
−=k
n
n
z k n yk x )()( ∑ ∑∞
−∞=
−∞
−∞=
−=k
n
n
k z n y z k x )()(
)()( z Y z X =

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 48/59
The z-Transform
System Function

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 49/59
Shift-Invariant System
h(n)h(n)
x(n) y(n)= x(n)*h(n)
X ( z ) Y ( z )= X ( z ) H ( z ) H ( z )
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 50/59
Shift-Invariant System
H ( z ) H ( z )
X ( z ) Y ( z )
)(
)()(
zX
z Y z H =

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 51/59
N
th
-Order Difference Equation
∑∑==
−=− M
r
r
N
k
k r n xbk n ya00
)()(
∑∑=
−
=
− = M
r
r
r
N
k
k
k z b z X z a z Y 00
)()(
∑∑==
−
=
−N
k
k
k
M
r
r
r z a z b z H 00
)(
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 52/59
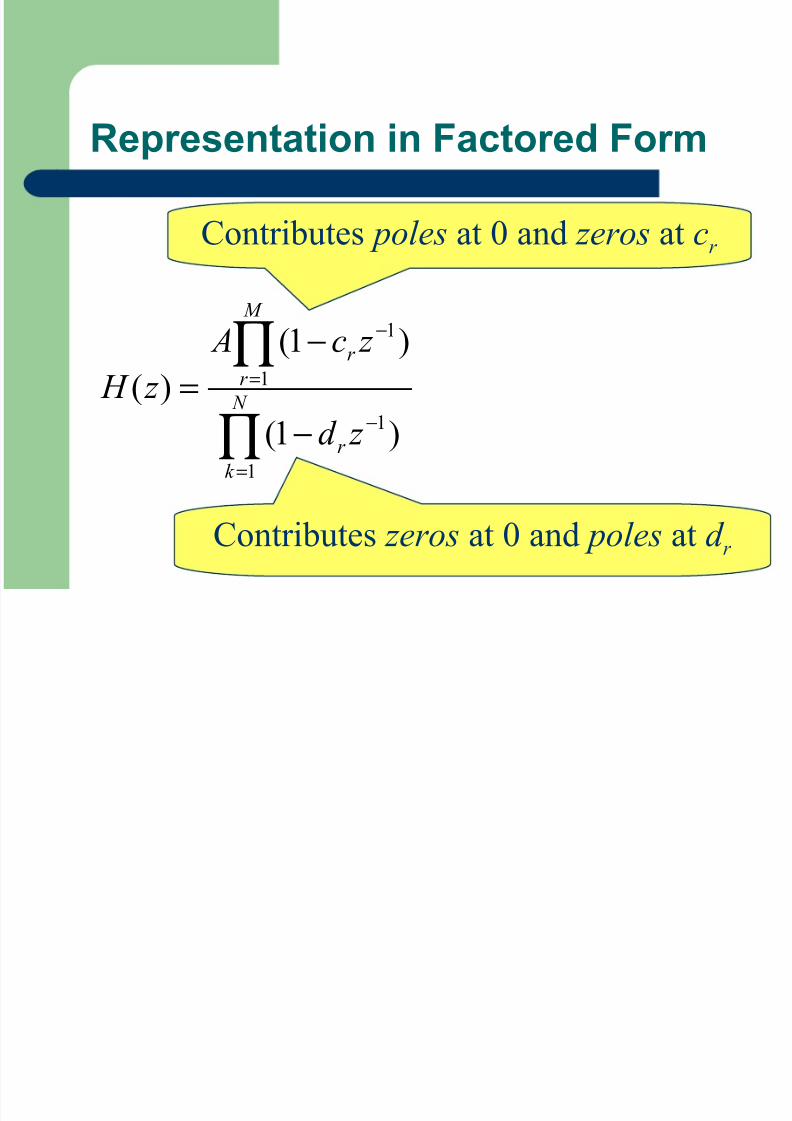
Representation in Factored Form
∏
∏
=
−
=
−
−
−=
N
k
r
M
r
r
z d
z c A
z H
1
1
1
1
)1(
)1(
)(
Contributes poles at 0 and zeros at cr
Contributes zeros at 0 and poles at d r

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 53/59
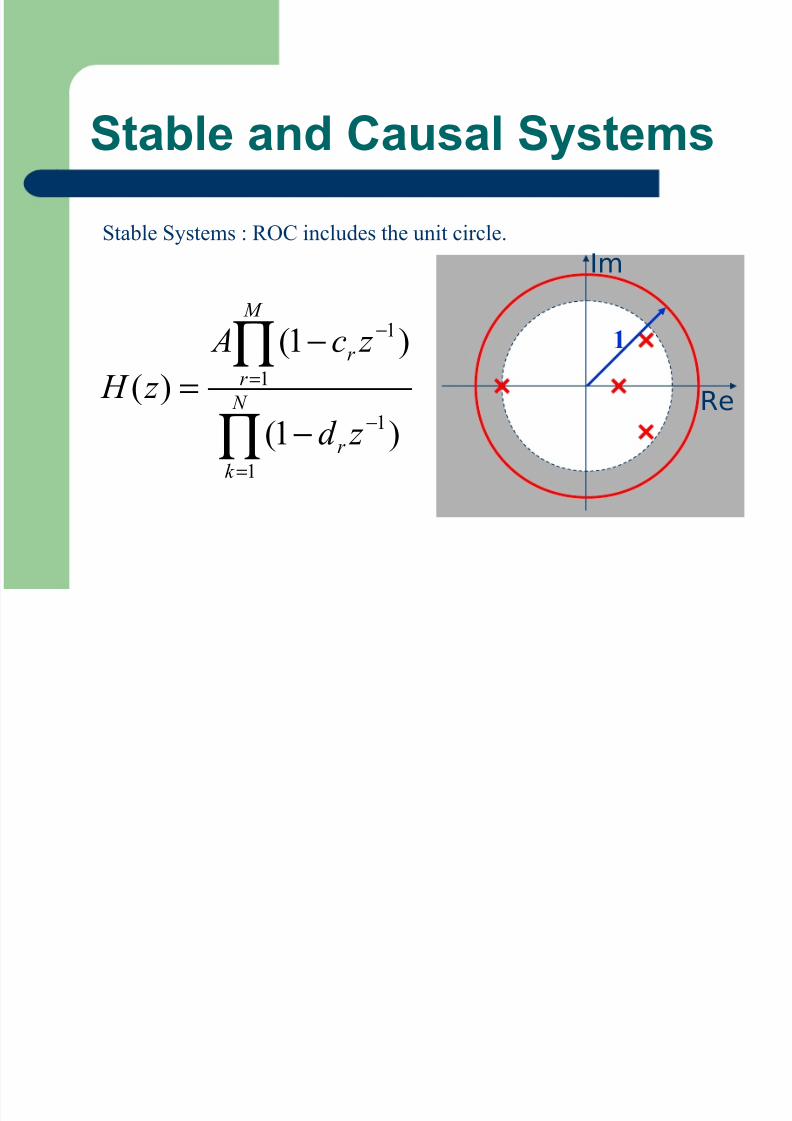
Stable and Causal Systems
∏
∏
=
−
=
−
−
−=
N
k
r
M
r
r
z d
z c A
z H
1
1
1
1
)1(
)1(
)(Re
Im
Causal Systems : ROC extends outward from the outermost pole.
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 54/59
Stable and Causal Systems
∏
∏
=
−
=
−
−
−=
N
k
r
M
r
r
z d
z c A
z H
1
1
1
1
)1(
)1(
)(Re
Im
Stable Systems : ROC includes the unit circle.
1

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 55/59
ExampleConsider the causal system characterized by
)()1()( n xnayn y +−=
1
1
1)( −
−
=az
z H
Re
Im
1
a
)()( nuanh n=
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 56/59
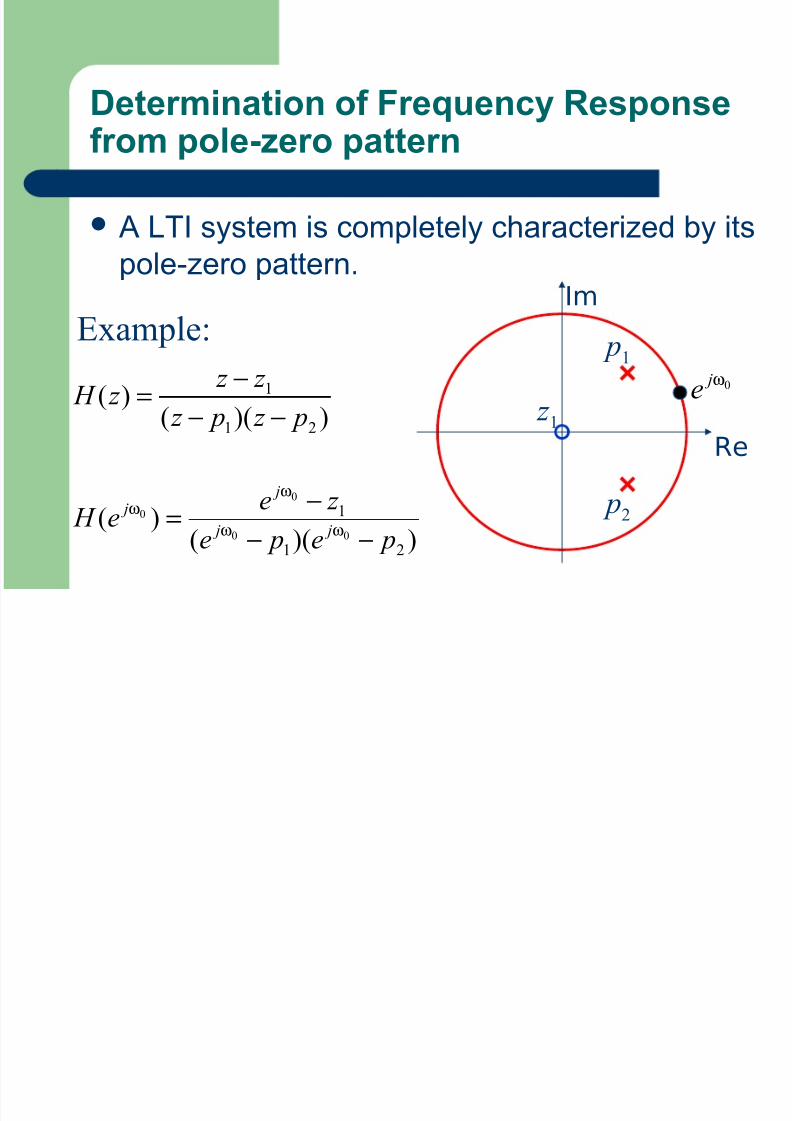
Determination of Frequency Response
from pole-zero pattern
A LTI system is completely characterized by its
pole-zero pattern.
))((
)(21
1
p z p z
z z z H
−−
−=
Example:
))(()(
21
1
00
0
0
pe pe
z ee H
j j
j j
−−−
= ωω
ωω
0ω je
Re
Im
z 1
p1
p2
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 57/59
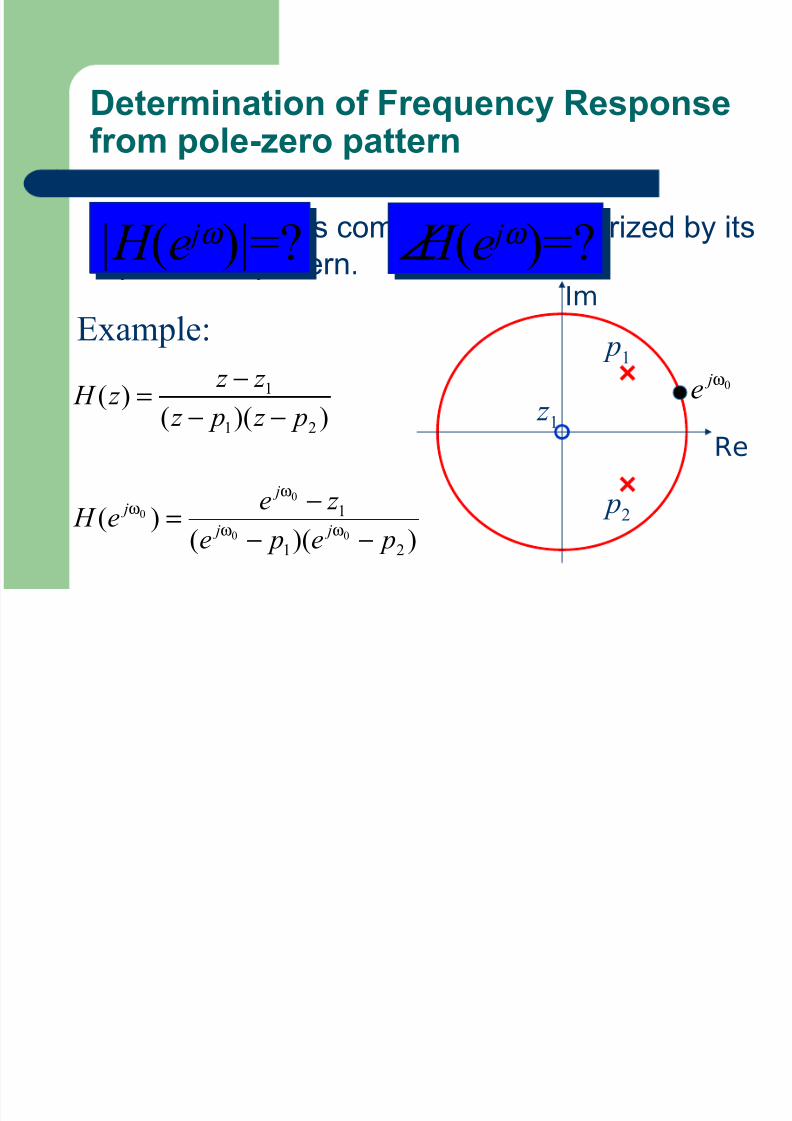
Determination of Frequency Response
from pole-zero pattern
A LTI system is completely characterized by its
pole-zero pattern.
))((
)(21
1
p z p z
z z z H
−−
−=
Example:
))(()(
21
1
00
0
0
pe pe
z ee H
j j
j j
−−−
= ωω
ωω
0ω je
Re
Im
z 1
p1
p2
|H (e jω )|=?|H (e jω )|=? ∠ H (e jω )=?∠ H (e jω )=?

7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 58/59
Determination of Frequency Response
from pole-zero pattern
A LTI system is completely characterized by its
pole-zero pattern.
Example:
0ω je
Re
Im
z 1
p1
p2
|H (e jω )|=?|H (e jω )|=? ∠ H (e jω )=?∠ H (e jω )=?
|H (e jω )| =| |
| | | | φ1
φ 2
φ 3
∠ H (e jω ) = φ 1−(φ 2+
φ 3 )
7/29/2019 z plane
http://slidepdf.com/reader/full/z-plane 59/59
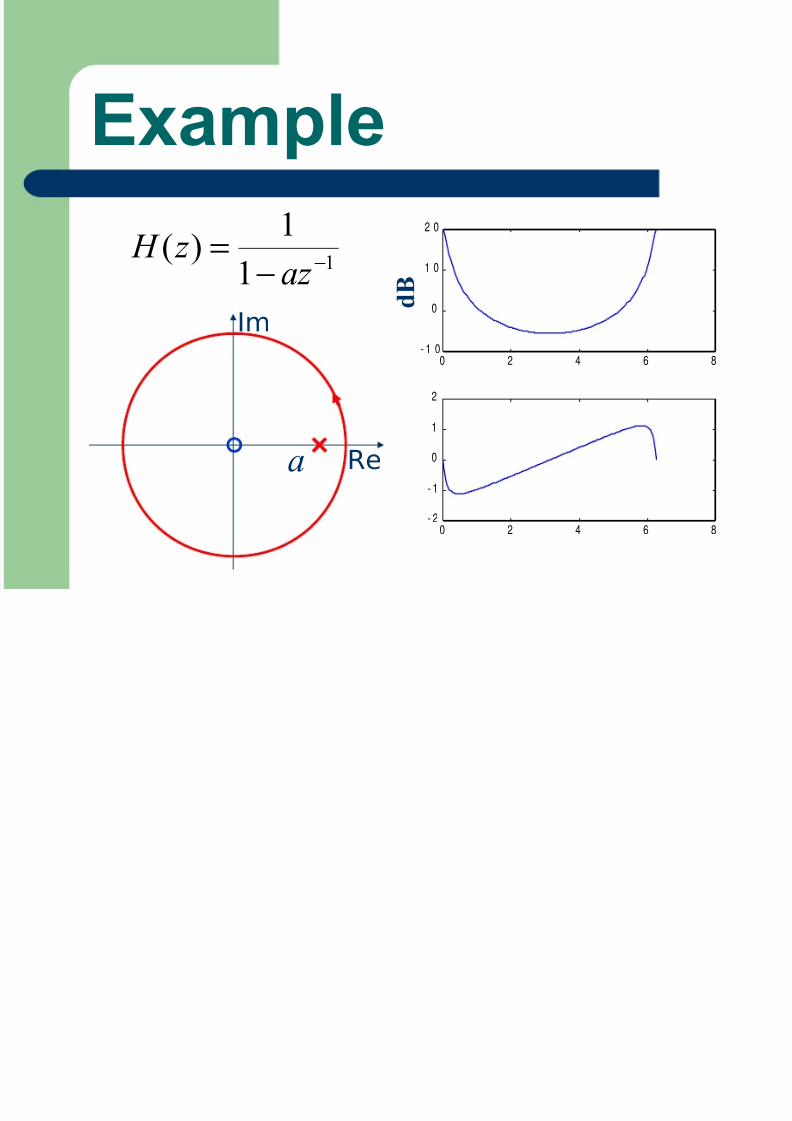
Example1
1
1)( −
−
=az
z H
Re
Im
a
0 2 4 6 8
- 1 0
0
1 0
2 0
0 2 4 6 8
- 2
- 1
0
1
2
d B