vision, robotics and motion 2018 … · © 2017 yaskawa confidential information all rights...
TRANSCRIPT
June 4, 2018 | 1© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
VISION, ROBOTICS AND MOTION 2018
COLLABORATIVE APPLICATIONS WITH YASKAWA
June 6-7, 2018
Ing. Christopher Schneider
Dr. Martina Mironovova
June 4, 2018 | 2© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
AGENDA
1. Briefly About YASKAWA
• Actual, History
• Products
2. About Collaborative Robot HC10
• Technical description, accessories
• Certifications
3. Collaborative Applications
• Which markets, which industries, which applications?
• How far to go?
4. Approach of YASKAWA in Collaborative Applications
• What type of analysis is needed before purchasing collaborative robot?
• Applicability of MRK, workstation arrangements
• Target variables
• Resource planning
• Economic evaluation
• Contacts

June 4, 2018 | 3© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
Briefly About YASKAWA

June 4, 2018 | 4© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
A GLOBAL LEADING TECHNOLOGY SUPPLIER FOR THE
AUTOMATION MARKETS
€ 3,5 BillionSales p. a.
14.500Employees
Regional presence
4 strategic business units:
Japan, Asia (incl. China), America, Europe (EMEA)
TOP 100 GLOBAL
INNOVATORS
3 times awarded
(2015, 2016 and 2017)
Development
of motors for
mining
Development
of DC Minertia-
motors
Launch of
DC servo
motors
Development
of first
MOTOMAN
robot
Launch of
frequency
converters
and AC servo
drives & motors
Robot portfolio:
>100 different
robots
Introduction of
dual arm robot
and first
matrix converter
1915 1950s 1960s 1970s 1990s 2000s 2010s
46%35%
12% 6%
Split
business units
System
technology
Robotics Motion & Control
> € 11 BillionMarket Capitalization
IT
YASKAWA
EUROPE
June 4, 2018 | 5© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
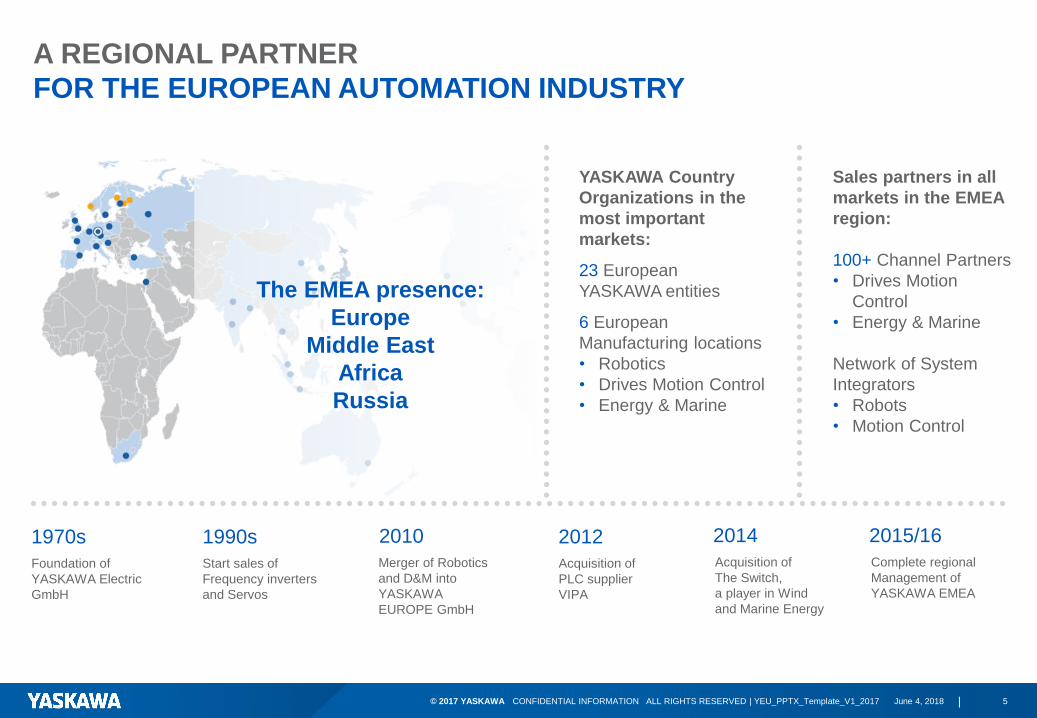
A REGIONAL PARTNER
FOR THE EUROPEAN AUTOMATION INDUSTRY
Sales partners in all
markets in the EMEA
region:
100+ Channel Partners
• Drives Motion
Control
• Energy & Marine
Network of System
Integrators
• Robots
• Motion Control
YASKAWA Country
Organizations in the
most important
markets:
23 European
YASKAWA entities
6 European
Manufacturing locations
• Robotics
• Drives Motion Control
• Energy & Marine
Foundation of
YASKAWA Electric
GmbH
1970s
Start sales of
Frequency inverters
and Servos
1990s
Merger of Robotics
and D&M into
YASKAWA
EUROPE GmbH
2010
Acquisition of
PLC supplier
VIPA
2012Acquisition of
The Switch,
a player in Wind
and Marine Energy
2014
Complete regional
Management of
YASKAWA EMEA
2015/16
The EMEA presence:
Europe
Middle East
Africa
Russia
June 4, 2018 | 6© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
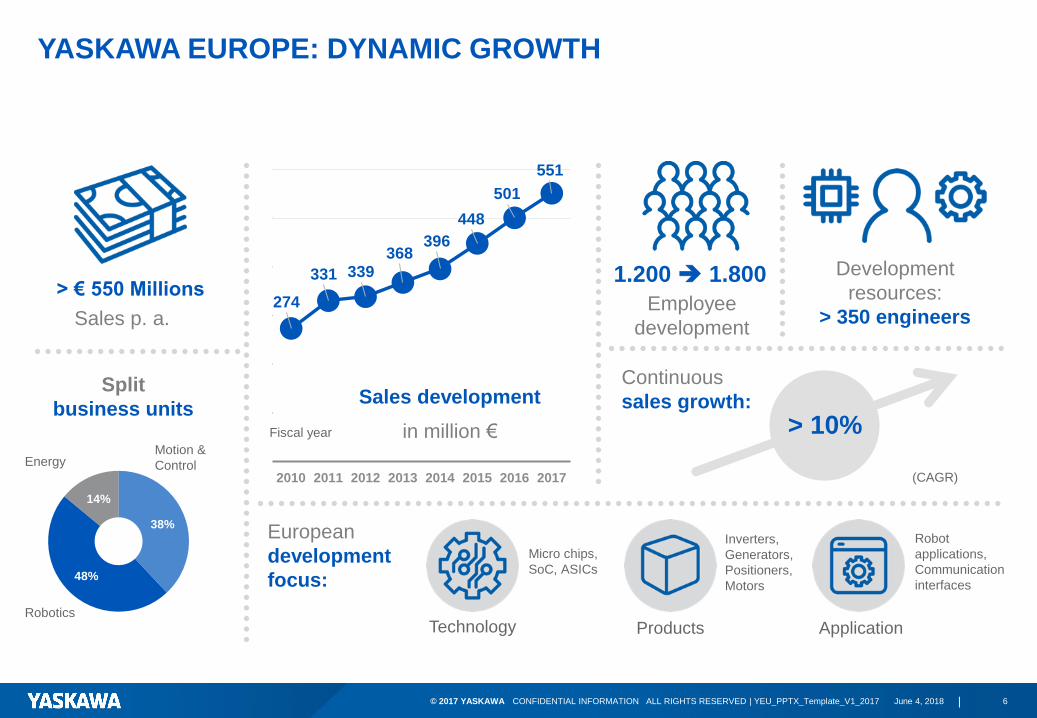
38%
48%
14%
YASKAWA EUROPE: DYNAMIC GROWTH
> € 550 Millions
Sales p. a.Employee
development
Motion &
ControlEnergy
Robotics
274
331 339368
396
448
501
551
2010 2011 2012 2013 2014 2015 2016 2017
Sales development
in million €Fiscal year > 10%
Continuous
sales growth:
(CAGR)
Split
business units
Development
resources:
> 350 engineers
European
development
focus:
Technology Products Application
1.200 ➔ 1.800
Micro chips,
SoC, ASICs
Inverters,
Generators,
Positioners,
Motors
Robot
applications,
Communication
interfaces

June 4, 2018 | 7© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
YASKAWA EUROPE
ONGOING INVESTMENT
Investment in Europe is the key for continuous growth.
YASKAWA EMEA will …
• be even closer to customers in order to react quicker,
• develop new markets such as clean energy and marine (electrification of vessels),
• expand local production to optimize the supply chain and guarantee excellent customer service,
• expand local development capacity to be closely involved in European innovation and technology (e.g. Industry 4.0),
• contribute experience and competence to the European discussion on innovation (mechatronic, humatronic),
• and offer practical solutions for further industrial automation: i3-Mechatronics: integrated, intelligent, innovative
YASKAWA's contribution to Industrie 4.0.
Glasgow
ScotlandRibnica
Slovenia
Vaasa
FinlandTorsås
Sweden
Allershausen
Germany
Kočevje
Slovenia

June 4, 2018 | 8© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
ROBOTICS FOR DIVERSE APPLICATIONS
Wide portfolio:
4-axis up to 15-axis robotsSoftware
Services
MotoSim - simulation
MotoLogix – PLC interface
YaskawaCockpit – predictive
maintenance
June 4, 2018 | 9© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
About Collaborative Robot HC10
June 4, 2018 | 10© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
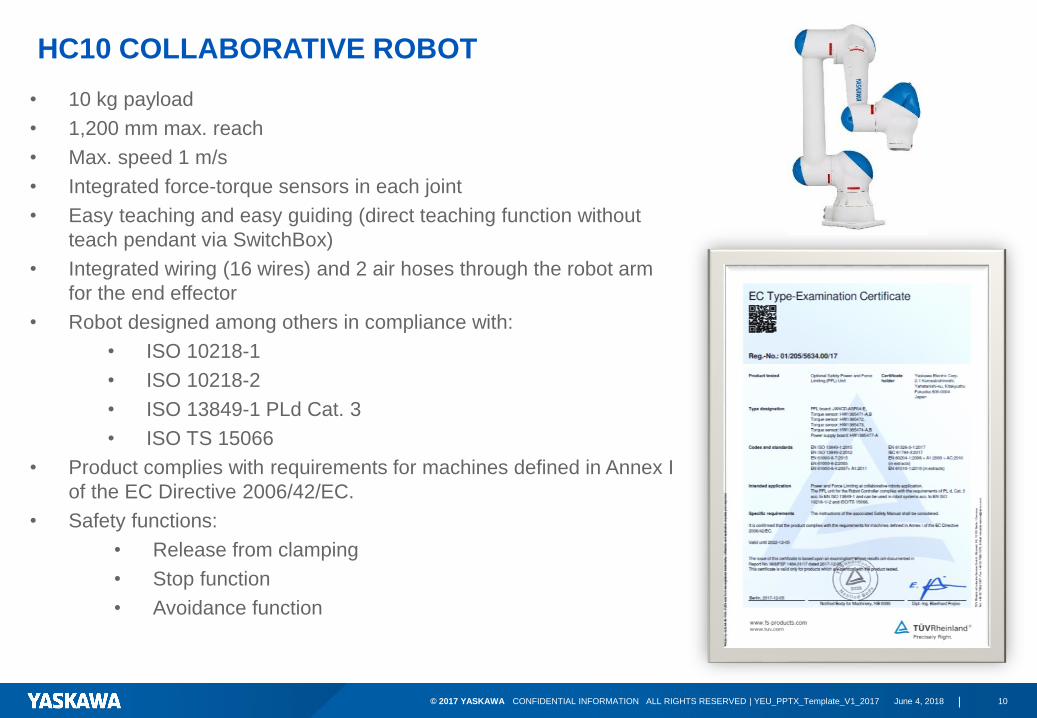
HC10 COLLABORATIVE ROBOT
• 10 kg payload
• 1,200 mm max. reach
• Max. speed 1 m/s
• Integrated force-torque sensors in each joint
• Easy teaching and easy guiding (direct teaching function without
teach pendant via SwitchBox)
• Integrated wiring (16 wires) and 2 air hoses through the robot arm
for the end effector
• Robot designed among others in compliance with:
• ISO 10218-1
• ISO 10218-2
• ISO 13849-1 PLd Cat. 3
• ISO TS 15066
• Product complies with requirements for machines defined in Annex I
of the EC Directive 2006/42/EC.
• Safety functions:
• Release from clamping
• Stop function
• Avoidance function

June 4, 2018 | 11© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
PFL (POWER AND FORCE LIMITING) FUNCTION
SAFETY FUNCTION
• The robot compares the calculated
torque and the measured torque from
the posture and calculates an
external force torque.
• When the external force that a robot
receives exceeds a limit level (each
axis, TCP), the robot stops.
• When the restart switch of the robot
is pushed, the robot removes a
protection stop and restarts
movement.
Joint Torque
Sensors
Restart
Switch
Lamp
(Collaborative
Operation
indication)
Lamp
(Servo On indication)
End of arm tooling through axis
(no cables around the arm)

June 4, 2018 | 12© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
HC10 WITH FUNCTIONAL SAFETY UNIT
Yellow area:
• Limiting the working space of the HC10 to prevent
the robot from working at head height
• No clamping options, therefore higher collaborative
speed feasible
Red area:
• Clamping possibilities available
• Speed reduction in this area

June 4, 2018 | 13© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
ROBOT OPTIONS: HC10DT WITH SWITCHBOX
SwitchBox with HC10DT
• Tool for easy teaching
• HW on T-axis of the robot with buttons:
• TEACH
• TOOL
• FINISH
• SW application on Smart Pendant with
explanationsSwitchBox for easy teaching

June 4, 2018 | 14© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
ROBOT OPTIONS: SMART PENDANT – SOLUTION FOR EASE OF USE
• 10.1” WXGA TFT Display
• 1280 x 800 pixels
• LED back light touch panel
• Capacitive Touchscreen
• 215W x 283.5H x 68.5D mm
• Weight 1.1 kg
• Drop Tested: 1 m
• External Storage: USB memory
Smart Pendant for HC10
Smart Frame Jogging
JOB playback

June 4, 2018 | 15© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
APPLICATION ACCESSORIES
HC10 with Robotiq gripper
Grippers – Integrated Solution
• Cooperation with:
• Zimmer
• Schunk
• Weiss Robotics
• Robotiq
• Accessories as plug-n-play solution (HMI interfaces)
Automatic Screwdriver with Screw Feeder
• Developed by Stöger Automation
• Automatic screwdriver with automatic feeding mechanism
• Safety dual channel signal in the tip
• Motor static mounted
• Pneumatic cylinder for screw positioning
HC10 with Stöger Screwdriver
June 4, 2018 | 16© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
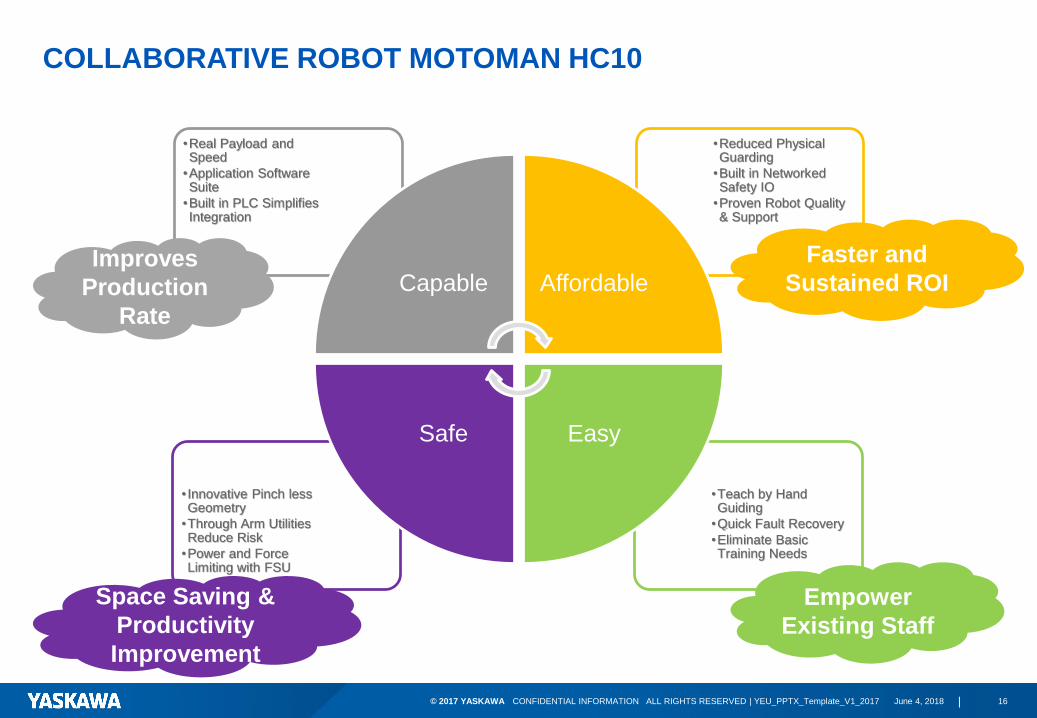
COLLABORATIVE ROBOT MOTOMAN HC10
•Teach by Hand Guiding
•Quick Fault Recovery
•Eliminate Basic Training Needs
• Innovative Pinch less Geometry
•Through Arm Utilities Reduce Risk
•Power and Force Limiting with FSU
•Reduced Physical Guarding
•Built in Networked Safety IO
•Proven Robot Quality & Support
•Real Payload and Speed
•Application Software Suite
•Built in PLC Simplifies Integration
Capable Affordable
EasySafe
Improves
Production
Rate
Faster and
Sustained ROI
Empower
Existing Staff
Space Saving &
Productivity
Improvement
June 4, 2018 | 17© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
Collaborative Applications
June 4, 2018 | 18© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
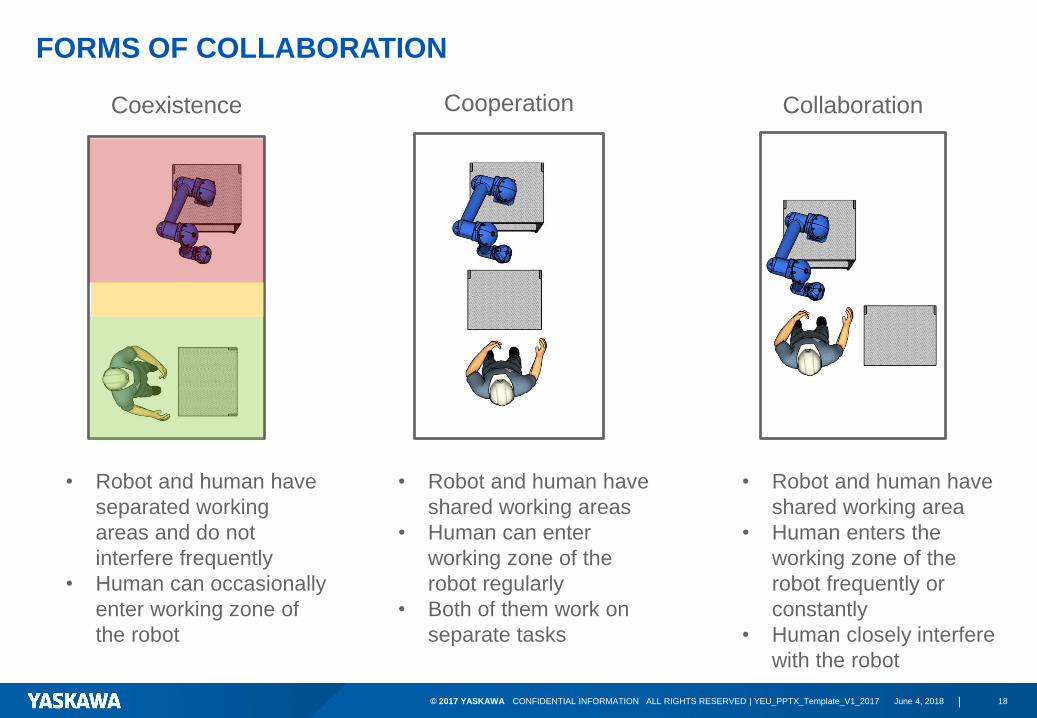
FORMS OF COLLABORATION
Coexistence Cooperation Collaboration
• Robot and human have
separated working
areas and do not
interfere frequently
• Human can occasionally
enter working zone of
the robot
• Robot and human have
shared working areas
• Human can enter
working zone of the
robot regularly
• Both of them work on
separate tasks
• Robot and human have
shared working area
• Human enters the
working zone of the
robot frequently or
constantly
• Human closely interfere
with the robot

June 4, 2018 | 19© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
ROBOT APPLICATIONS IN EUROPE
Source: Master Thesis: Schneider
Strongest growth (Europe, 2015-2016)
• Handling Operations & Machine Tending
• Assembling & Disassembling
Strongest handling application (Europe)
• Material handling
• Plastics Moulding
Strongest branch (Europe)
• Automotive
• Plastics& Chemical, Metal
June 4, 2018 | 20© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
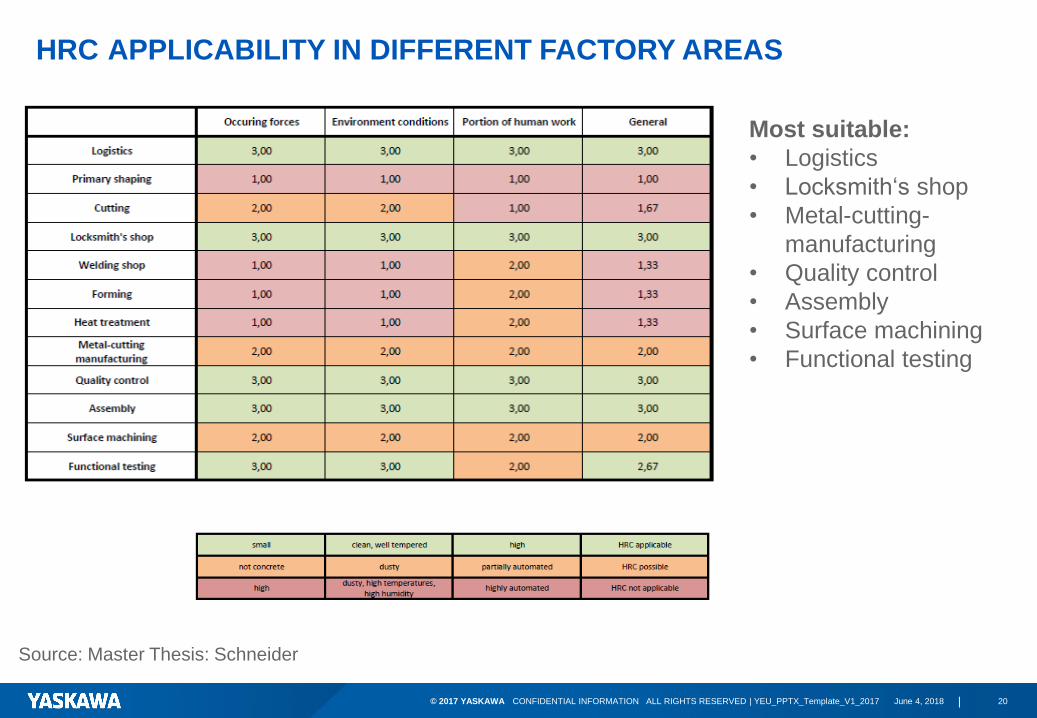
HRC APPLICABILITY IN DIFFERENT FACTORY AREAS
Source: Master Thesis: Schneider
Most suitable:
• Logistics
• Locksmith‘s shop
• Metal-cutting-
manufacturing
• Quality control
• Assembly
• Surface machining
• Functional testing
June 4, 2018 | 21© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
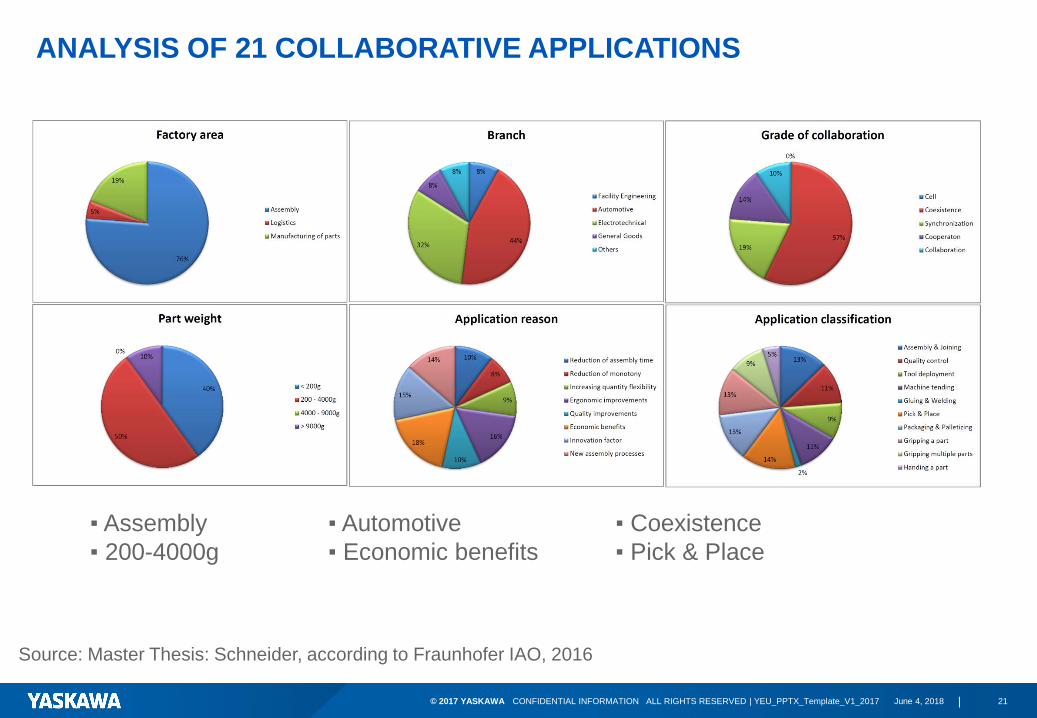
ANALYSIS OF 21 COLLABORATIVE APPLICATIONS
Source: Master Thesis: Schneider, according to Fraunhofer IAO, 2016
▪ Assembly ▪ Automotive ▪ Coexistence
▪ 200-4000g ▪ Economic benefits ▪ Pick & Place

June 4, 2018 | 22© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
DEVELOPMENT OF COLLABORATIVE ROBOTS (GLOBAL)
Source: Master Thesis: Schneider, according to BIS, 2016
• Electrical &
Electrotechnical
• Automotive
• Plastics & Polymer
• Material Handling
• Machine Tending
• Small Parts Assembly
Mil.
US
DM
il. U
SD
June 4, 2018 | 23© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
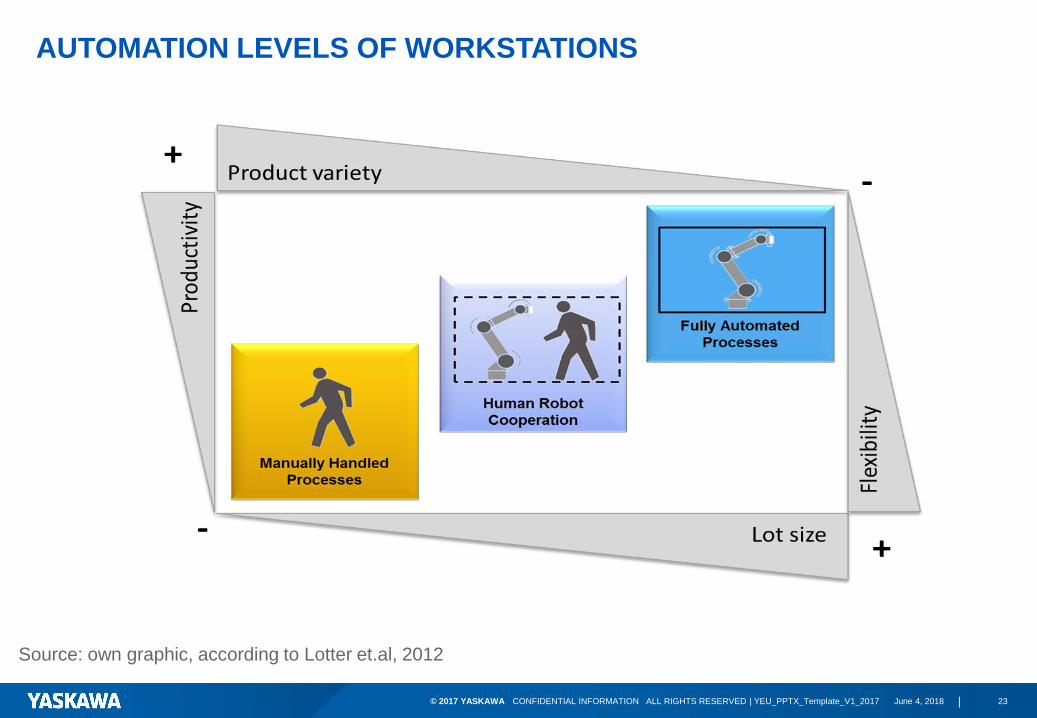
AUTOMATION LEVELS OF WORKSTATIONS
Source: own graphic, according to Lotter et.al, 2012
June 4, 2018 | 24© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
Approach of YASKAWA in Collaborative
Applications

June 4, 2018 | 25© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
APPLICABILITY OF HRC
Economical Methodology:
• Define system boundaries characterized by four attributes:
1. Alternatives
• Product or process related
• Manual, HRC, fully automated processes
• Actual engineering possibilities – process specific
2. Environment conditions
• Standalone or integrated workstation in the factory
• Inputs as dynamic restrictions
3. Results
• Observation scope of alternatives
4. Time frame
• Period of evaluation of alternatives
Quality Triangle:
• Find an optimal way how to utilize skills of human and robot
• Choose appropriate automation grade according to the scope and
ease of each task
• Cooperating
• Fully manual
• Fully automated
Source: Master Thesis: Schneider
Cost
TimeQuality
Break-Even-Analysis of different
automation levels

June 4, 2018 | 26© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
ARRANGEMENTS OF WORKER, ROBOT AND MATERIAL
Source: Master Thesis: Schneider, according to Thiemermann, 2005

June 4, 2018 | 27© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
LAYOUT INTEGRATION OF COOPERATIVE WORK STATIONS
Source: Master Thesis: Schneider, according to Thiemermann, 2005
C M
MM
M
MMMM
C
Material
MA
A
CC M
A
A
AAA
A
• Autonomous unit
• Small lot sizes with
high variety
• Big work contents by
task division
• Second station for
order peaks possible
U ShapeCell production Square
• Chaku Chaku work system
based on LEAN and TPS
• Suitable for high variety in
workload
• Adjustment of facility
output by amount of
workers
• Parallel connection of manual
and cooperation work stations
• Big work scopes & low Takt
Times
• Modular facility arrangements
C = Collaborative
M = Manual
A = Automated
June 4, 2018 | 28© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
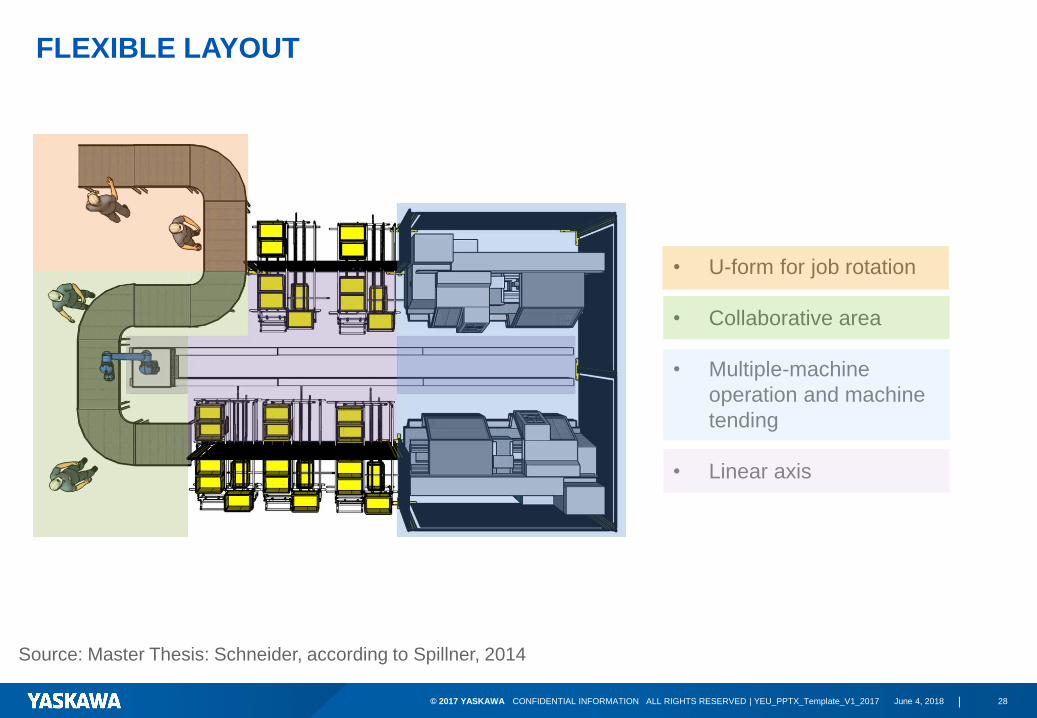
FLEXIBLE LAYOUT
Source: Master Thesis: Schneider, according to Spillner, 2014
• U-form for job rotation
• Collaborative area
• Multiple-machine
operation and machine
tending
• Linear axis

June 4, 2018 | 29© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
ADVANTAGES OF HRC
• Increased efficiency and quality, higher output, improved ergonomics and higher
flexibility
• Increased flexibility of the whole facility and of the work station itself
• Increased scalability of work stations by assigning work to cobot at peak times
• Enlarged work contents due to cobot
• Optimization of tact times and workload assignment – decrease workload of a human
• Job enlargement and job enrichment by work scope re-location
• Optimized ergonomics for the worker – reduction of accidents and illness absence
Human worker:
• Superior in complex tasks (learning, adapting, deciding or creative thinking)
• More flexible for complicated or steadily changing parts or environments
• no longer a necessity to stay the whole time at one station - greater flexibility enables the worker
to finish work at other stations, while the robot is working at the original one
Robot:
• Repetitive tasks with the need for high precision, endurance, speed and reliability
• Simple robot programs - the collaborative robot does not have to do all the work, only the easy
and repeating sequences
Source: Master Thesis: Schneider

June 4, 2018 | 30© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
TARGET VARIABLES
Technical target variables:
• Enabler for achievement of economical and social targets
• Consider technical reliability of the facility (technological risk)
• For measurement, use KPIs: Overall Equipment Effectiveness (O.E.E.), Takt Time, Machine
downtime, Availability, Quality, Accessability
Economical target variables:
• Net present value
• Utility analysis
• ROI
• Consider to calculate costs over the life cycle: Employee’s cost rate, Acquisition cost,
Commissioning cost, Maintenance cost, Cost for waste disposal, Occupancy cost, Training cost,
Energy cost, Cost for software, Other cost
• Consider task division, sequence planning, resource planning, transport and logistics, tact time
identification and optimization
Social target variables:
• Difficult to measure: Ergonomics, Environment conditions, Acceptance, Employee motivation
Source: Master Thesis: Schneider

June 4, 2018 | 31© 2017 YASKAWA CONFIDENTIAL INFORMATION ALL RIGHTS RESERVED | YEU_PPTX_Template_V1_2017
CONTACTS
YASKAWA Benelux B.V.
Science Park Eindhoven
5031 Industrieterrein
Ekkersrijt
5692 EB son
Tel: + 31 40 289 55 00
Martina Mironovova
YASKAWA Europe GmbH
Yaskawastraße 1
85391 Allershausen
Tel: +49 (0) 8166-90-237
Christopher Schneider
YASKAWA Europe GmbH
Yaskawastraße 1
85391 Allershausen
Tel: +49 (0) 8166-90-236