vision aided inertial navigation using single video camera measurements
DESCRIPTION
Vision Aided Inertial Navigation using Single Video Camera Measurements. Vasko Sazdovski. Faculty of Electrical Engineering, “Goce Delcev” University, Shtip, R.Macedonia Pilot Training Centre , ELMAK Elbit Systems of Macedonia , Airport Petrovec , Skopje, R.Macedonia - PowerPoint PPT PresentationTRANSCRIPT

Vision Aided Inertial Navigation using Single Video Camera Measurements
Faculty of Electrical Engineering, “Goce Delcev” University, Shtip, R.Macedonia
Pilot Training Centre, ELMAK Elbit Systems of Macedonia, Airport Petrovec, Skopje, R.Macedonia
ROBOTILNICA Intelligent Systems and Robotics, Skopje, R.Macedonia
Vasko Sazdovski

22
OUTLINE OF THE PRESENTATION
• INTRODUCTION
• THEORY OF SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM). INERTIAL NAVIGATION AND AUGMENTED STATE VECTOR.
• VISION SENSORS
• INERTIAL NAVIGATION AIDED BY SIMULTANEOUS LOCALIZATION AND MAPPING. SLAM AS SENSOR FUSION ALGORITHM
• INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING
• CONCLUSIONS
• FUTURE WORK POSSIBILITIES

INTRODUCTION
Future UAV’s have a need of high levels of autonomy and independence. They are going to become small, very agile and highly maneuverable.
Prof. Raffaello D'Andrea from ETH Zurich at ZURICH.MINDS 2012 showing the early quadrotor designs within its research group…
MeCam quadrotor
•14 sensors including side object detectors that enable "perfect and safe hovering”;•Voice control;•Autonomous person following;•Two Morpho autopilots and a video stabilization system;•Autonomous panoramas;•Real-time streaming to mobile devices;•$50 MSRP, potential availability "by the beginning of 2014“.

44
INTRODUCTION
Integrated navigation system design requires selection of:
•set of a sensors and•computation power
that provides reliable and accurate navigation parameters (position, velocity and attitude) with high update rates and bandwidth in small and cost effective manner.
Piccolo autopilot used on UAV for collecting meteorological or map data over long distances. Cloud Cap Technology USA.
Modern INS/GPS Navigation System for UAV’sSize: 131 x 57 x 19 mm Weight: 80 grams
Navigator SL Cloud Cap Technology USA

55
INTRODUCTION
Integrated navigation system design requires selection of:
•set of a sensors and•computation power
that provides reliable and accurate navigation parameters (position, velocity and attitude) with high update rates and bandwidth in small and cost effective manner.
MeCam quadrotor1GB RAM, SD card, 2.4GHz/5GHz Wi-Fi and Bluetooth connectivity.
Always Innovating Cortex-A9 SoC Module which can run from 1.0GHz to 1.5GHz

INTRODUCTION
Many of today’s operational navigation systems rely on inertial sensor measurements.
Single axis gyro
Three axis accelerometer
Atomic Inertial Measurement Unit (IMU) for Sparkfun Inc.
Inertial navigation is diverging slowly from the real measurements with time.

77
LORANOMEGANAVSATDMEAREA CORRELATOR
DOPPLERAIR DATA
GPS
INERTIAL
VERTICALGYRO
AHRS
MAGNETICCOMPASS
DIRECTIONALGYRO
POSITION SPEED
ATTITUDE HEADING
Ching-Fang Lin “Modern Navigation Guidance and Control Processing” Prentice Hall Inc. 1991
Additional sources of aiding information to the navigation parameters( non interactive aiding information)
INTRODUCTION

INERTIAL
POSITION SPEED
ATTITUDE HEADING
KNOWNENVIRONMENT
VISION SENSORS
Additional sources of aiding information to the navigation parameters(interactive aiding information)
Vision sensors are must nowadays
INTRODUCTION
INERTIAL
POSITION SPEED
ATTITUDE HEADING
NOVEL SOLUTIONSEX. VISION-BASED
SLAM
UNKNOWNENVIRONMENT

99
THEORY OF SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM).INERTIAL NAVIGATION AND AUGMENTED STATE VECTOR.
1m
1p
2p
3p
4p
5p
6p
1̂r
1
2̂r
23
4
5
77̂r
2m
3m
4m
5m
7m
6m
3̂r
4̂r
5̂r
6̂r
6
7p
Simultaneous Localization and Mapping (SLAM) uses relative measurements (range and bearing) from the vehicle with respect to the environment to build a map whilst simultaneously using the generated map computes vehicle position.
7
1
m
m
x
x
vk
k Augmented state vector
Vehicle state vector
Map points
Unknown environment

1010
m0p
1p
2p
3p
4p
5p
6p
00̂r
1̂r
1
2̂r
3̂r
4̂r
5̂r
6̂r
2
3
4
56
provide valuable information’s of the spatial relationship of the map point and the vehicle
Mapping of an unknown map point
kkkmik rpx ˆ
Localization using the map point
kkmikk rxp ˆ
THEORY OF SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM).INERTIAL NAVIGATION AND AUGMENTED STATE VECTOR.
Repeated relative measurements of a map point (circular movement)

ki
i
i
kmik
vk
iik v
zz
yy
xx
vxxhz
],,[
Observation models
k
iii
i
iii
i
iii
i
kmik
vk
iik v
zzyyxx
zzzzyyxx
yyzzyyxx
xx
vxxhz
222
222
222
)()()(
)()()(
)()()(
],,[
VISION SENSORS
Single video camera Stereo video camera
Measurement noiseLinear model
Nonlinear modelVehicle position
Map point

INERTIAL NAVIGATION AIDED BY SIMULTANEOUS LOCALIZATION AND MAPPING. SLAM AS SENSOR FUSION ALGORITHM
As we proposed the approach is to augment the vehicle state with number of map point estimates of the map point:
.,,2,1][ nizyxx Tiiimik
The augmented state vector containing the vehicle state and the map point estimates is denoted as:TTmn
k
Tmk
Tvkk xxxx ][ 1
When SLAM is performed on aerial vehicles the vehicle state can be represented by Inertial Navigation mechanization equations which give position, velocity and attitude quaternion:
11
1
11
2
1][
kk
nk
nbk
nb
nk
nk
k
nk
nk
qtq
vtgfC
ptv
q
v
p
vkx
mnk
mk
vkk
vkv
kkkk
x
x
wuxf
wuxfx
1
11
1
1
),(
),(
The augmented process model is of the form
where is the control input containing the acceleration and gyro measurements , is the process noise.
kuTb
zby
bx
bk ffff ][ Tb
k rqp ][kw

The equation for calculation of the map point estimates written in component form is
where is the measurement noise.
z
y
x
kkvk
imik
rz
ry
rx
vzxgx
ˆ
ˆ
ˆ
],,[
kv
],[],[
kki
kkkaugk zxg
xzxfx
Tzkk
zk
Txkk
xkk
xk
TxkkkT
augkaugkgRggPgPg
gPPfPfP )()(
The method for augmenting the map point estimates and building the covariance matrix is as follows. The new map point estimate is added to the augmented state vector and a new row and column are added to the covariance matrix:
xkgz
kg )(g kxkz
where and are Jacobians of function shown above with respect to the augmented state and observation , respectively
These equations are repeated until we augment the state vector with “sufficient” number of map point estimates. Through simulations we realized that we need more then three map point estimates.
INERTIAL NAVIGATION AIDED BY SIMULTANEOUS LOCALIZATION AND MAPPING. SLAM AS SENSOR FUSION ALGORITHM

As the vehicle circles around the map point, repeated measurements are available from the stereo camera.
Tzyxkz ][
Using these measurements we can start updating the augmented state vector by using each of the map point estimates at a time. Extended Kalman Filter (EKF) can be implemented for the update.
The state covariance is propagated first
where is the Jacobian of the augmented process model with respect to the augmented state vector.
k
Txkkk
xkkk QfPfP 1|11|
xkf
Next using the measurements (observations) we update the augmented state vector and its covariance:
kkkkkk vKxx 1|| ˆˆ
1|1|| kkxkkkkkk PhKPP
where the innovation vector and the Kalman gain are calculated as:
is the Jacobian of the observation function with respect to the vehicle state and the map point estimate used in the update.
)ˆ( 1| kkkk xhzv
11|1| ][
k
Txkkk
xk
Txkkkk RhPhhPK
xkh )(h
INERTIAL NAVIGATION AIDED BY SIMULTANEOUS LOCALIZATION AND MAPPING. SLAM AS SENSOR FUSION ALGORITHM

PERFORMANCES OF INERTIAL NAVIGATION AIDED BY SIMULTANEOUS LOCALIZATION AND MAPPING
Map point estimates
True estimated and divergent vehicle trajectories Position errors
398
399
400
401
402
403
404
405
548549
550551
552553
554555
2.8
3
3.2
0
2000
4000
6000
0
2000
4000
60000
500
1000
1500
2000
x[m]
Aerial vehicle-3D
y [m]
h [m
]
200
400
600
800
1000
200
400
600
800
10000
100
200
300
400
x[m]
Aerial vehicle-3D
y [m]
h [m
]
0 50 100 150 200 250 300 350-10
-8
-6
-4
-2
0
2
4
6
8
10position errors
t[s]
x [
m]
0 50 100 150 200 250 300 350-10
-5
0
5
10
15position errors
t[s]
y [m
]
0 50 100 150 200 250 300 350-3
-2
-1
0
1
2
3
4position errors
t[s]
z [
m]

Map point estimates
0 50 100 150 200 250 300 350398
398.5
399
399.5
400
400.5
401
401.5
402
402.5map point
t[s]
x [m
]
0 50 100 150 200 250 300 350548
548.5
549
549.5
550
550.5
551
551.5
552
552.5map point
t[s]
y [m
]
0 50 100 150 200 250 300 3502
2.2
2.4
2.6
2.8
3
3.2
3.4
3.6
3.8
4map point
t[s]
z [m
]
0 50 100 150 200 250 300 3500
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04determinant Pxm1
t[s]
[m]
Determinant of the covariance matrix of the first map point
estimate
-5
0
5
-5
0
5-2
-1
0
1
2
-2
-1
0
1
2
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-1
0
1
The contour ellipsoid of the covariance matrix of the first
map point estimate
PERFORMANCES OF INERTIAL NAVIGATION AIDED BY SIMULTANEOUS LOCALIZATION AND MAPPING

1717
0 50 100 150 200 250 300 3500
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2determinant Pv
t[s][m
]
-4
-2
0
2
4
-3
-2
-1
01
2
3-2
-1
0
1
2
x [m]y [m]
z [m
]
-2-1
01
2
-2
-1
0
1
2-4
-2
0
2
4
0 50 100 150 200 250 300 3500
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
-3 distance
t[s]
[m]
The relative distance between the first and second map point
estimates
Determinant of the covariance matrix of the vehicle position
The contour ellipsoid of the covariance matrix of the
vehicle position
PERFORMANCES OF INERTIAL NAVIGATION AIDED BY SIMULTANEOUS LOCALIZATION AND MAPPING

1818
INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING
Bearing Only Simultaneous Localization and Mapping (BOSLAM) is very attractive these days because it permits the use of single camera as sensor for measuring the bearing i.e. unit direction to the map points.
The major drawback of this solution is the problem of map point initialization from a single measurement.

1919
Much of the research in BOSLAM is focused towards the problem of initialization of the map points from single camera measurements. In the literature two techniques are proposed to address the problem of map point initialization.
The first technique involves delaying the map point initialization until a criterion is fulfilled and sufficient baseline is available from different vehicle positions.
1.
2.The second technique tries to avoid the delay and initialize the map point from a single measurement The fact that after the first observation, the map point lies along on the line from the vehicle to the map point (the projection ray) is used
The approach presented before to augment the state vector not only with one map point estimate brings new parameterization of the map point in BOSLAM. The novelty comes from the usage of the certain number of map point estimates for update of the whole augmented state vector together with a combination of repeated measurements and motion in vicinity of the map point. This approach brings delayed initialization of the map points.
Both techniques have their pros and cons
INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING

Discussion on the observability of a system provides insights and understanding of the fundamental limits of the estimation processes.
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5vehicle position
iterations with time
info
rmat
ion
information x-axis
information y-axisinformation z-axis
0 10 20 30 40 50 60 70 80 90 1000
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1map point estimate
iterations with time
info
rmat
ion
information x-axis
information y-axisinformation z-axis
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5vehicle position
iterations with time
info
rmat
ion
information x-axis
information y-axisinformation z-axis
0 10 20 30 40 50 60 70 80 90 1000
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1map point estimate
iterations with time
info
rmat
ion
information x-axis
information y-axisinformation z-axis
Stationary Vehicle
Vehicle moving on a circular path
INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING
Since observability analysis can give the best achievable performance even before the system is built, it can be considered as tool for computer analysis of many complicated estimation processes.
2121
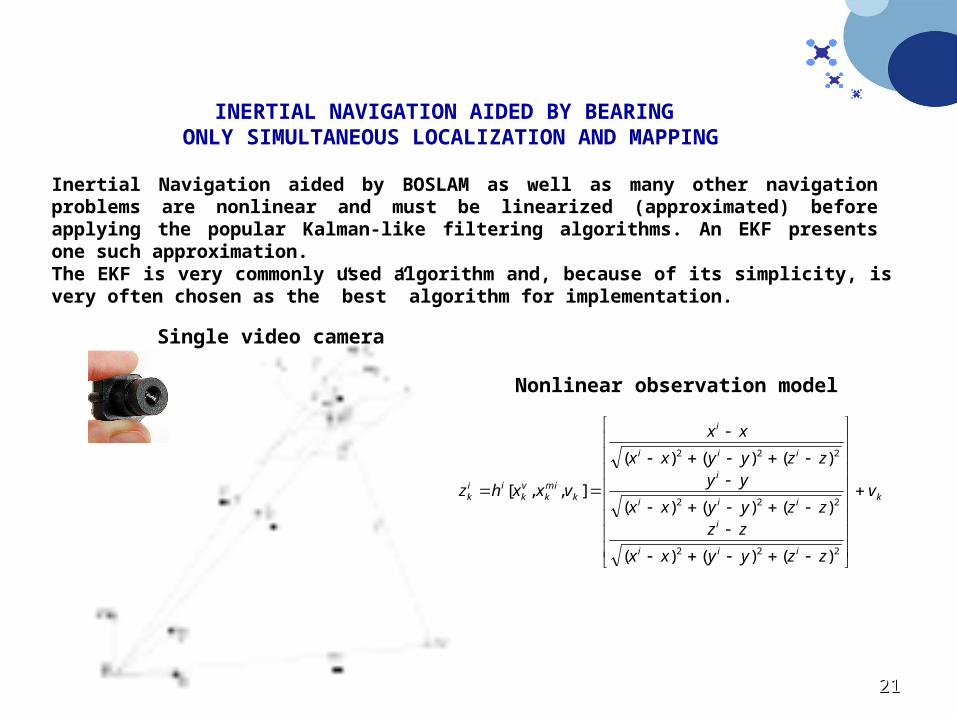
The EKF is very commonly used algorithm and, because of its simplicity, is very often chosen as the ”best” algorithm for implementation.
INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING
Single video camera
k
iii
i
iii
i
iii
i
kmik
vk
iik v
zzyyxx
zzzzyyxx
yyzzyyxx
xx
vxxhz
222
222
222
)()()(
)()()(
)()()(
],,[
Nonlinear observation model
Inertial Navigation aided by BOSLAM as well as many other navigation problems are nonlinear and must be linearized (approximated) before applying the popular Kalman-like filtering algorithms. An EKF presents one such approximation.

2222
INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING
Because of numbers of significant problems that appear when implementing the EKF, other algorithms such as:
•Iterated Extended Kalman Filter (IEKF)•Unscented Kalman Filter (UKF)•Unscented Particle Filter (UPF)
were implemented, tested and compared with the EKF algorithm.
The EKF is very commonly used algorithm and, because of its simplicity, is very often chosen as the ”best” algorithm for implementation.
Inertial Navigation aided by BOSLAM as well as many other navigation problems are nonlinear and must be linearized (approximated) before applying the popular Kalman-like filtering algorithms. An EKF presents one such approximation.

0 10 20 30 40 50 60 70 80 90 100-60
-40
-20
0
20
40
60position errors
t[s]
x [m
]
EKF
IEKFUKF
UPF
0 10 20 30 40 50 60 70 80 90 100-60
-40
-20
0
20
40
60position errors
t[s]
y [m
]
EKF
IEKFUKF
UPF
0 10 20 30 40 50 60 70 80 90 100-60
-40
-20
0
20
40
60
80position errors
t[s]
z [m
]
EKF
IEKF
UKF
UPF
0200
400600
800
0
200
400
600
8000
100
200
300
400
x[m]y [m]
z [m
]
True trajectoryUn-aided IN trajectory
EKF trajectory
Map point
IEKF trajectory
UKF trajectoryUPF trajectory
True estimated and divergent vehicle trajectories
PERFORMANCES OF INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING

2424
0 10 20 30 40 50 60 70 80 90 100380
385
390
395
400
405
410
415map point
t[s]
x [m
]
EKF IEKF
UKF
UPF
0 10 20 30 40 50 60 70 80 90 100535
540
545
550
555
560
565
570map point
t[s]
y [m
]
EKF IEKF
UKF
UPF
0 10 20 30 40 50 60 70 80 90 100-30
-25
-20
-15
-10
-5
0
5
10
15map point
t[s]
z [m
]
EKF IEKF
UKF
UPF
Map point estimates
PERFORMANCES OF INERTIAL NAVIGATION AIDED BY BEARING ONLY SIMULTANEOUS LOCALIZATION AND MAPPING

Aiding Inertial navigation (IN) by BOSLAM exhibits a high degree of nonlinearity and typically in these applications an EKF introduces large estimation errors.
Other algorithms such as UKF and UPF demonstrate best performance and appear to be efficient estimators for the concept of IN aided by BOSLAM.
The SLAM aided IN and BOSLAM aided IN sensor fusion algorithm present reliable solutions that provide aiding information to IN from vision sensors. These algorithms successfully integrate the inertial and vision sensors with no a priori knowledge of the environment.
CONCLUSIONS

QUADROTOR RESEARCH ARENA
GRASP Lab, University of Pennsylvania, extensive use of motion capture systems
Vicon T Series motion capture System

QUADROTOR RESEARCH ARENA
Flying Machine arena , Institute for Dynamic Systems and Control ETH Zurich

QUADROTOR RESEARCH ARENA
Localization and mapping done with two Hokuyo lidars and a servo motor. University of Pennsylvania
CityFlyer project, Robotics and Intelligent Systems Lab, City College of New York, City University of New York.
STARMAC Project in the Hybrid Systems Lab at UC Berkeley

QUADROTOR RESEARCH ARENA
• Hokuyo laser range-finder (1),• stereo cameras (2), • monocular color camera (3),• laser-deflecting mirrors for altitude (4), • 1.6GHz Intel Atom-based flight computer (5), • Ascending Technologies internal processor and IMU (6).
Robotics Group, CSAIL MIT:

QUADROTOR RESEARCH ARENA
sFly European Project: Visual-Inertial SLAM for a small hexacopter (IROS 2012 video screenshot)
Computer Vision Group at TUM Germany: Autonomous Camera-Based Navigation of a Low-Cost Quadrocopter

FUTURE WORK POSSIBILITIES
In our future research we are working on developing novel approaches i.e. efficient estimators (sensor fusion algorithms) which will provide navigation performances and accuracy to a level close to the Differential GPS using only single video camera and inertial sensors.
Our research work is very much focused on the practical experimentation and validation of the before defined problems. Quadrotor UAV is the chosen platform for the practical experiments.
Quadrotor Flying FrogROBOTILNICA Intelligent
Systems and Robotics
Custom modified quadrotor from KKMulticopter South Korea

FUTURE WORK POSSIBILITIES
We are fascinated by insect based navigation. Flying insects especially inspire much of our research on autonomous navigation systems.
We are very much interested in how the flying insects adept at maneuvering in complex, unconstrained, hostile and hazardous environments.

FUTURE WORK POSSIBILITIES
Our approach with the practical experiments presents a low cost approach. Low cost Inertial Measurement Unit (IMU) from Sparkfun Electronics provides the angular rates (gyro) measurements and accelerometer measurements. These inertial sensors data together with the video from a smartphone camera are transferred over WiFi and/or 3G to a remote server/PC for processing. The video processing is performed on the remote PC using OpenCV libraries, together with the sensor fusion algorithms. The results are transferred back to the quadrotor for guidance and control of the vehicle for performing the required maneuvers (motion) and the vehicle task itself.

FUTURE WORK POSSIBILITIES
As with the case of singe UAV, simply passing or flying by a map point with no manoeuvre will not help much for autonomous navigation for swarm of UAV’s. Coordination and cooperation between the UAV’s performing manoeuvres over same environment features (map points) are needed. This investigation is expected to address the issues when low accuracy vision sensors are used on UAV’s. In this scenario the UAV’s can take measurements not just of the environment but also of each other. It is expected that these measurements can accelerate the convergence of the novel algorithms under experimentations

3535
QUESTIONS ARE WELCOMED
?THANK YOU FOR YOUR ATTENTION