vibro-acoustics-an overviewmrao/intro.pdf · 2004-08-30 · components, chain drives, wind, pumps,...
TRANSCRIPT

1
1Lecture 1
VibroVibro--AcousticsAcoustics--An OverviewAn Overview
2Lecture 1
Vibro-Acoustics
• What?• Why?• How ?

2
3Lecture 1
Harmonic Motion
Mechanical Vibrations
Sound (Acoustics)
Force
MotionLinearNon-Linear
Arbitrary motion
4Lecture 1
Our heart beat, our lungs oscillate, we hear because our ear drum vibrates…Vibration even makes us snore!!
The light waves which permit us to see & sound waves through which we hear entail vibration
We move by oscillating our legs
We cannot even say “Vibration” without vibration of larynges, vocal cord
We limit out discussion to “MECHANICAL VIBRATION & Noise”… i.e. Vibration & Acoustics of Dynamic Systems
What is a Dynamic System??? Any System that contain Mass and Elasticity.

3
5Lecture 1
FriendFriend
•Conveyors, Hoppers, Compactors, Pneumatic Drills, etc.
•Opening of a cork from a wine bottle
•Washing Machine
•Mechanical Shakers, Mixers, Sieves, Sorters, etc.
•Musical Instruments
•Clocks, Watches
•Medical Field – Massagers, etc.
FoeFoe•RESONANCE – RESONANCE – RESONANCE
Tacoma Narrows BridgeTacoma Narrows Bridge
•Similar problems in machine tools, vehicles, turbines, pumps, compressors, buildings, aircraft & spacecraft systems
•Excessive vibration leads to loosening on parts, noise & eventual failure
•Effects of vibration on human body: Discomfort, Fatigue, Loss of Efficiency
•Sound quality in products
6Lecture 1
Vibro-Acoustic Design Considerations
•Acoustic CriteriaNoise: Hearing Damage, AnnoyanceSpeech Intelligibility, Enjoyment of MusicSound Quality: Perception & Judgment of Product/Process QualityWarning Signals: Use of sound to determine safetyUse of Sound for Diagnostics & Health Monitoring
• Vibration & Dynamic Design CriteriaLocalized Damage, Fatigue, Human DiscomfortRoughness or Harshness of Operation & EnvironmentUse of Vibration for Diagnostics & Health MonitoringStructural Integrity & Crashworthiness

4
7Lecture 1
Automotive Noise & Vibration
Road Inputs (forces)
Powertrain Forces
Acoustic Response (drivers ear)
Vibration Response (steering column)
Aerodynamic Forces
8Lecture 1
Building Blocks: m, c, kThe fundamental building blocks of a physical system that undergoes dynamic behavior are;
m Mass elements, m
Energy dissipation elements (dampers), c
Energy storage elements (springs), k

5
9Lecture 1
Real Structures (m, c, and k)
10Lecture 1
Basic System (SDOF)
ground
m
ck
X(t)
F(t)
m
X
spring damping force
applied force
Applying Newton's Law:
ForcesX∑ = mass * acceleration
spring force damping force applied force mass * acceleration+ + =

6
11Lecture 1
Free Vibration Response
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.015
-0.01
-0.005
0
0.005
0.01
0.015
time - seconds
ampl
itude
damped free vibration
Given an initial state of energy and no applied force, an exponentially decaying harmonic motion will result.
This motion is characteristic of the physical properties (M,C,K) of the system.
12Lecture 1
Fundamental Properties
MK Frequency Natural n =ω
KM2C Ratio Damping =ζ
n2
d 1 Frequency Natural Damped ωζ−=ω
ground
m
ck
X(t)
πω
=2
f (Hz) Frequency Natural nn

7
13Lecture 1
Free Vibration Response
time - seconds0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.015
-0.01
-0.005
0
0.005
0.01
0.015am
plitu
dedamped free vibration
The free response of the system can be described in terms of the fundamental properties.
( )( )Θ+ω= ζω− tsinAe)t(x dtn
0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 6 0 . 7 0 . 8 0 . 9 1-2
-1 . 5
-1
-0 . 5
0
0 . 5
1
1 . 5
2
0 0 . 1 0 . 2 0 . 3 0 . 4 0 . 5 0 . 6 0 . 7 0 . 8 0 . 9 1-2
-1 . 5
-1
-0 . 5
0
0 . 5
1
1 . 5
2
14Lecture 1
Forced Response
ground
m
ck
X(t)
F(t) )ft2cos(F)t(F π=
Am
plitu
de o
f For
ce
time
)ft2cos(X)t(x Response StateSteady
Φ+π=
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-1.5
-1
-0.5
0
0.5
1
1.5
tim e
Dis
plac
emen
t
-
X
F
X
8
15Lecture 1
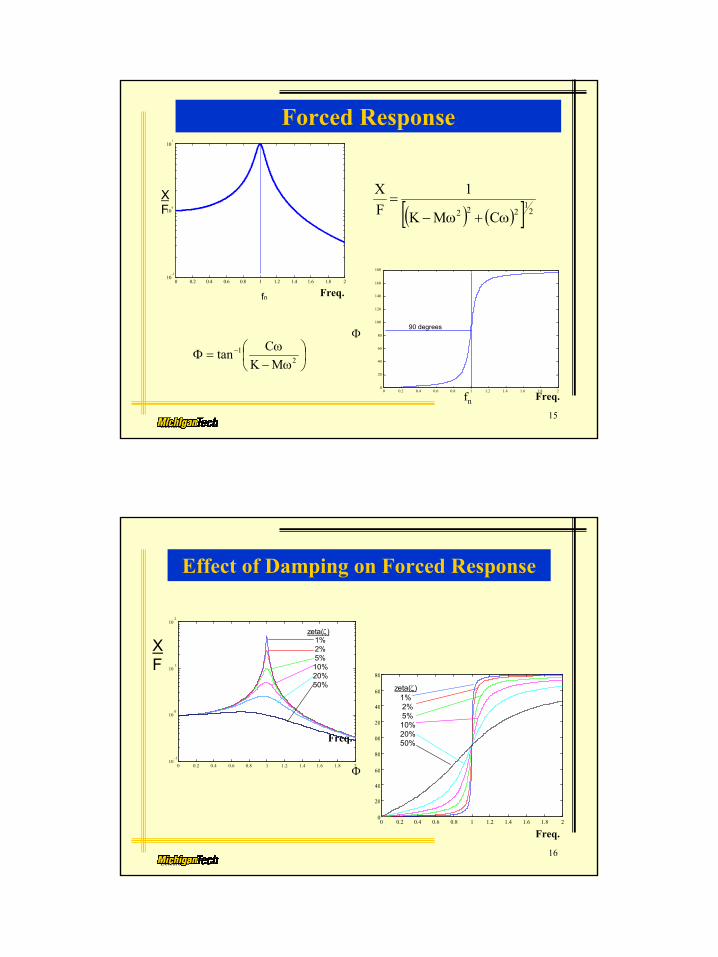
Forced Response
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 10 -1
10 0
10 1
fn
X F
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
20
40
60
80
100
120
140
160
180
90 degreesΦ
fn Freq.
Freq.
( ) ( )[ ] 21
222 CMK
1FX
ω+ω−=
ω−ω
=Φ −2
1
MKCtan
16Lecture 1
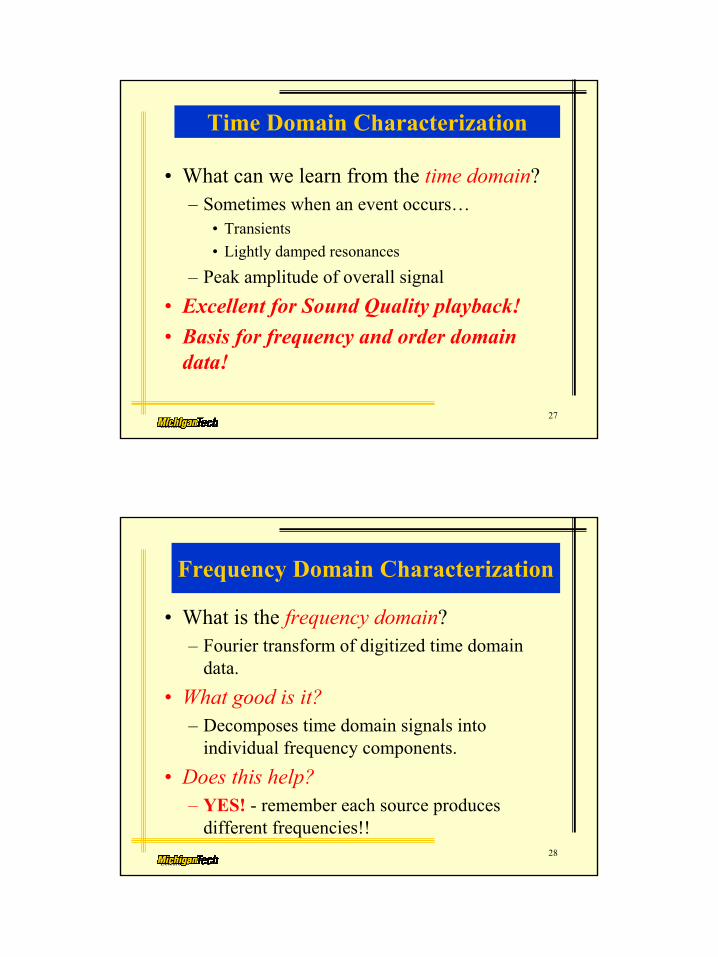
Effect of Damping on Forced Response
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 210
-1
100
101
102
zeta(ζ) 1% 2% 5% 10% 20% 50%
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 0
20
40
60
80
00
20
40
60
80
zeta(ζ) 1% 2% 5% 10% 20% 50%
Freq.
Freq.
Φ
XF

9
17Lecture 1
Regions of the FRF
0 2 4 6 8 10 12 14 16 18 2010
-2
10-1
100
Frequency Response Function
Frequency Hz
Log-
Mag
nitu
de
0 2 4 6 8 10 12 14 16 18 20-200
-150
-100
-50
0
Frequency Hz
Phas
e
damping controlled region
stiffness controlled region
mass controlled region
18Lecture 1
Total Response
0 1 2 3 4 5 6
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
time - seconds
X(t) transient
X(t) steady state
0 1 2 3 4 5 6 -0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
time - seconds
SDOF total response

10
19Lecture 1
Real Structures
mode 1
m1
c1 k1
p(t)
mode 2
m2
c2 k2
p(t)
mode 3
m3
c3 k3
p(t)
20Lecture 1
Mode Shapes1 2 3
8
5
2
8
0-3
8-7
6
mode 1
mode 3
mode 2

11
21Lecture 1
Source - Path - Receiver Concept
Source Path Receiver
Sources:
Engine, transmission, transfer case, prop-shaft,rotating components, chain drives, wind, pumps, road surface, etc.
Paths:
Structure-borne or airborne
Receiver:
Operators ear, steering column, seat, passengers ear/seat, pass-by observers.
22Lecture 1
Source, Path, Receiver CharacteristicsSource, Path, Receiver Characteristics
Source: Depends on the definition of the analysis
•Apparent “source of energy”, e.g. Electric motor
•Vector Quantity, e.g. rotating unbalance, acoustic energy
•Characterized by forces, moments, volume-velocities
•Operating System, e.g. IC engine, washing machine, AC compressor

12
23Lecture 1
Sources and Paths
24Lecture 1
Characterizing Sources
• What is the best way to characterize NVH sources?– Time Domain?– Frequency Domain?– Order Domain?
• What are these different domains?

13
25Lecture 1
Characterizing Sources
• What do we want to learn about a system to characterize it?– Amplitude?– Frequency?– Damping?– Natural Frequencies?– What are significant contributors to response?
• Intricate details about different contributors?
26Lecture 1
Time Domain Characterization
• What is the time domain?– Simply digitized signal from a transducer.
RESONANCES
14
27Lecture 1
Time Domain Characterization
• What can we learn from the time domain?– Sometimes when an event occurs…
• Transients• Lightly damped resonances
– Peak amplitude of overall signal• Excellent for Sound Quality playback!• Basis for frequency and order domain
data!
28Lecture 1
Frequency Domain Characterization
• What is the frequency domain?– Fourier transform of digitized time domain
data.• What good is it?
– Decomposes time domain signals into individual frequency components.
• Does this help?– YES! - remember each source produces
different frequencies!!

15
29Lecture 1
Frequency Domain Characterization
ORDERS - RADIAL LINES
RESONANCES - VERTICALLINES
30Lecture 1
Order Domain Characterization
• What is the order domain?– Order domain is when data are Fourier
transformed relative to the shaft position instead of time.
• What good is it?– Energy of an order is not smeared across the
spectrum.– Orders appears as vertical lines on colormaps!

16
31Lecture 1
Path: Capable of transmitting energy from the source to the receiver
•Any “media”, steel, rubber, plastic, fluids, gases
•Directionality may be important, (X,Y,Z, Θx, Θy, Θz)
•Compliant Paths characterized by complex stiffness
•Characteristics described by Frequency Response Functions.
•Examples include: engine mounts, body mounts, bolted joints, springs, shock absorbers, air, water, any structural member
Source, Path, Receiver CharacteristicsSource, Path, Receiver Characteristics
32Lecture 1
Paths of InterestPaths of Interest
Source
Substructure
Structure borne paths
Air-borne pathsReceiver
Substructure

17
33Lecture 1
Air-borne vs. Structure-borne
Tire/road interface energy travels through the “structure” of the vehicle to the steering column.
Tire/road interface energy travels through the air and leaks into the cabin through a small holein the door seal.
Air-borne Path
Structure-borne Path
34Lecture 1
Receiver: Responds to energy flowing through the paths
•Human or Human-structure interface
•Structural components
•Directionality may be important, (X,Y,Z, Θx, Θy, Θz)
•Can be affected by multiple paths at the same time
•Examples include: drivers right ear, steering column, seat, conversation in the house, Floor, cabinet, isolated hardware
Source, Path, Receiver CharacteristicsSource, Path, Receiver Characteristics

18
35Lecture 1
Automotive “Receivers”
Driver’s Ear
Steering Column
Accelerator pedalSeat Track
Mirrors
Energy from the sources travels through both structure-borne and air-borne pathsto the receivers
36Lecture 1
Driver’s EarCharacterization of the NVH energy received at the Drivers Ear is done with a measurement of the Sound Pressure Level.