vibration - (complete notes)
DESCRIPTION
Mechanical VibrationTRANSCRIPT

VIBRATION
This is a branch of science of engineering that deals with repetitive motion of mechanical system from machine parts to large structures. Sometimes these vibrations are desirable as in the case of a string vibrating on an instrument. Sometimes vibrations are unwanted as in the case of vibrating ground motion produced during an earthquake.
The physical explanation of the phenomena of vibration concerns the interplay between potential (PE) and kinetic Energy (KE). A vibrating element system must have a component that stores potential energy and releases it as kinetic energy in the form of motion (Vibrating) of a mass.

Note that while within the elastic limit of the spring the mass held at the other and causes a proportional elongation on the spring
Thus: fs α e fs = Ks e
Where:Ks = Spring Constant (N/m)fs = Force from the mass (N)e = Elongation (m)
General Assumption on the loading of the spring
1. When at rest, the system held in equilibrium because the force of the spring is equal to the weight or load.
2. When in motion, the unbalanced force on the spring systems causes that motion.
(a) (b) (c)
xs
-x
+x
Situation (b) illustrates the deflection (Xs) of a spring having a load (m)
Situation (c) illustrates a spring moving in a downward direction resulting from a simple harmonic motion.

From: FBD of (c)fs
Where:w = mg………….eq. 1
fs’ w fs = kxs ± kx……eq. 2
fs’ = kxs’ = ma….eq.3
Again from the illustration
-fs’ = -w + fs
= -w + [kxs + kx] where: w = kxs
ma = -kx
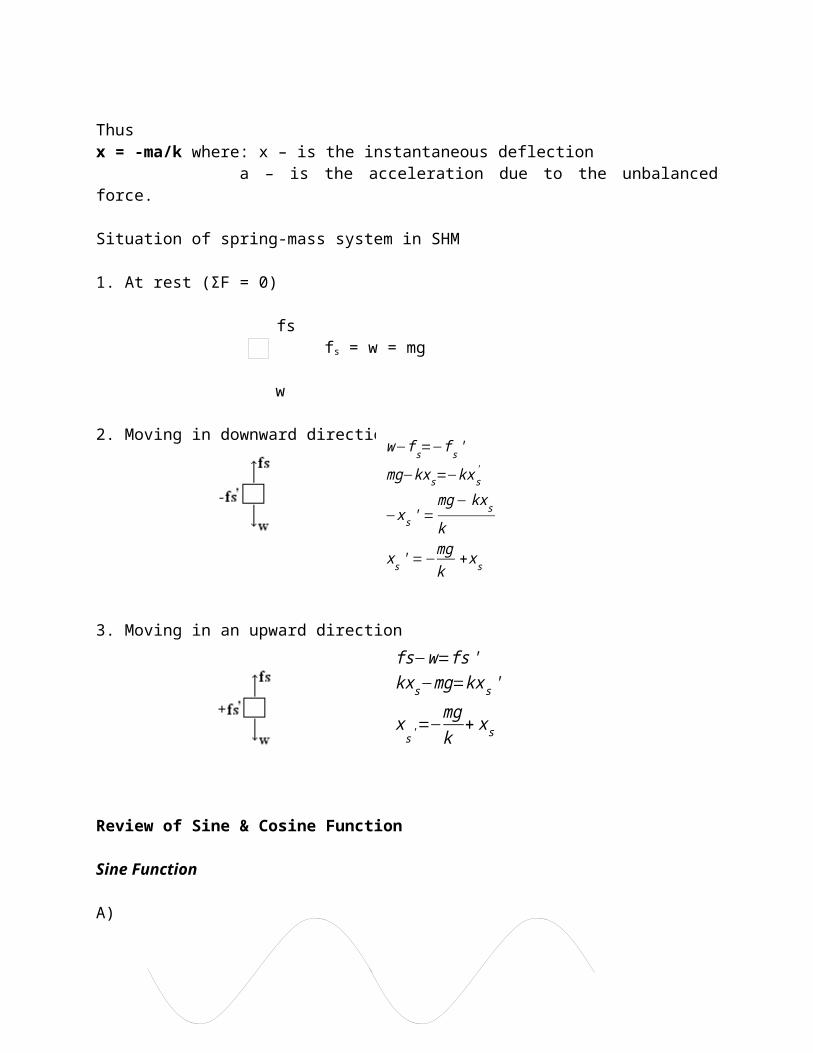
Thus x = -ma/k where: x – is the instantaneous deflection
a – is the acceleration due to the unbalanced force.
Situation of spring-mass system in SHM
1. At rest (ƩF = 0)
fsfs = w = mg
w
2. Moving in downward direction
3. Moving in an upward direction
w−f s=− f s '
mg−kxs=−kx s'
−xs ' =mg − kxs
k
xs ' =−mgk
+x s
fs−w=fs 'kx s−mg=kx s '
xs'=−mg
k+ x s
Review of Sine & Cosine Function
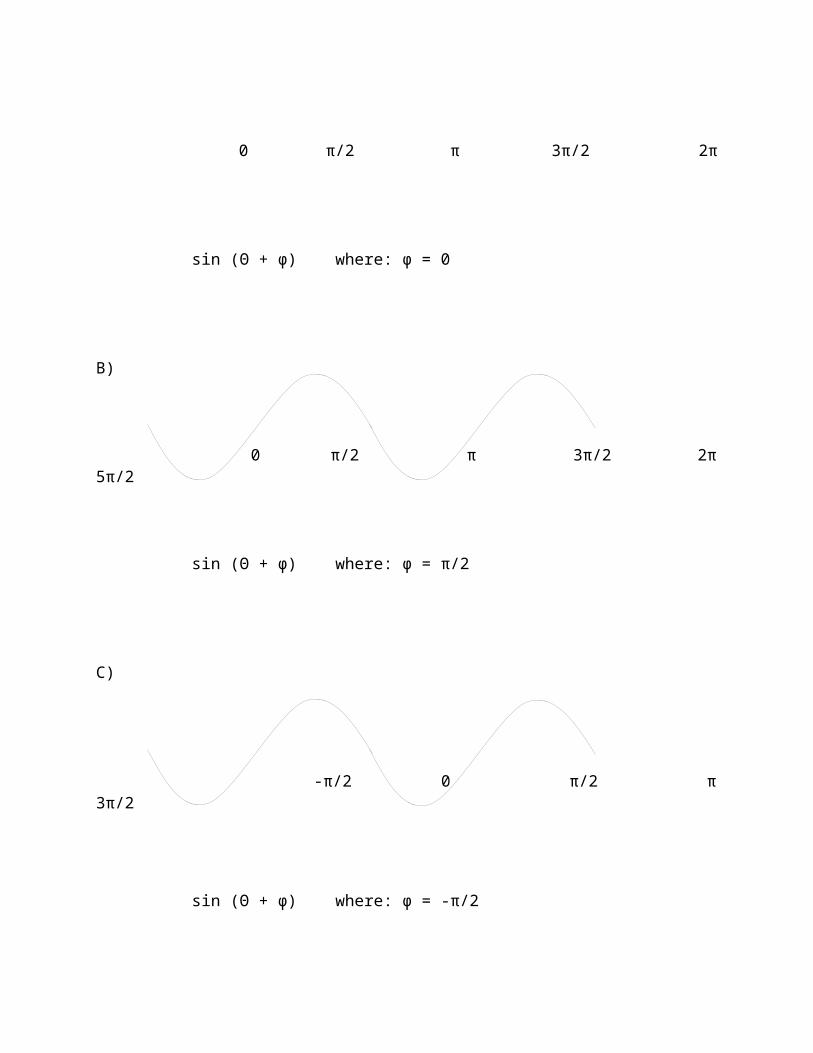
Sine Function
A)
0 π/2 π 3π/2 2π
sin (ϴ + ϕ) where: ϕ = 0
B)
0 π/2 π 3π/2 2π 5π/2
sin (ϴ + ϕ) where: ϕ = π/2
C)
-π/2 0 π/2 π 3π/2
sin (ϴ + ϕ) where: ϕ = -π/2
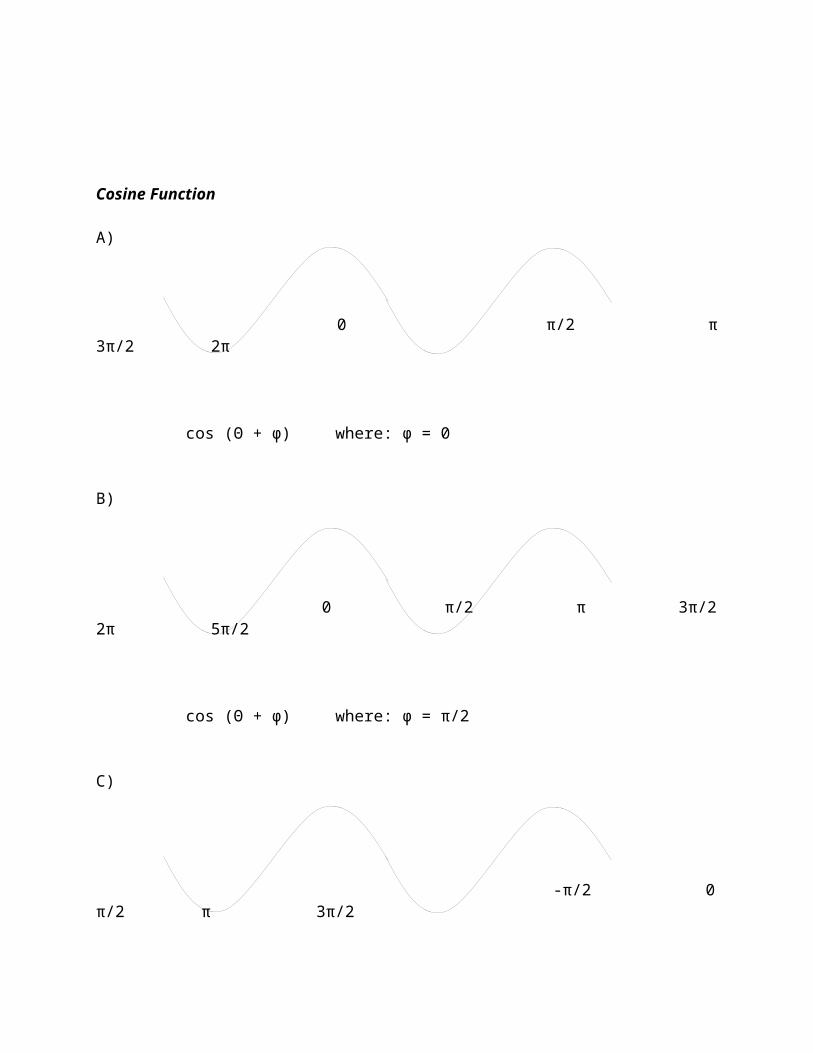
Cosine Function
A)
0 π/2 π 3π/2 2π
cos (ϴ + ϕ) where: ϕ = 0
B)
0 π/2 π 3π/2 2π 5π/2
cos (ϴ + ϕ) where: ϕ = π/2
C)
-π/2 0 π/2 π 3π/2
cos (ϴ + ϕ) where: ϕ = -π/2
To determine (Ø) phase angle from:
x= A cos (ωt+φ )let t=0 when the motion is about to startand see if x= Aif so : φ = 0
EXAMPLE:
A block weighing 96.5 lbf is dropped from a height of 4ft upon a spring whose modulus is 100 lb / in. What velocity will the block have at the instant if the spring is deformed by 4 in.
Given:
4 ftk = 100 lb / in
Situation 1PE=mgh=KE
Wh=12
mv2
mgh=12
mv2
v=√2 gh=√2(32 .2 ft /sec2)( 4 ft ). ..=16. 05 ft /sec
Situation 2
−Δ PEs=12
kx2
−12
kx 2=12
m [Vf 2−Vo2 ]
from……W =mg
−kx 2=wg
[Vf 2−Vo2 ]
Vf =−√32 .2ft
s2 (100lbf
inx
12in1 ft )(4 in
12inft )
2
96 .5 lbf
+√(16 . 05 ft /sec )2
Vf =14 . 6 ft /sec
W = 96.5 lbf

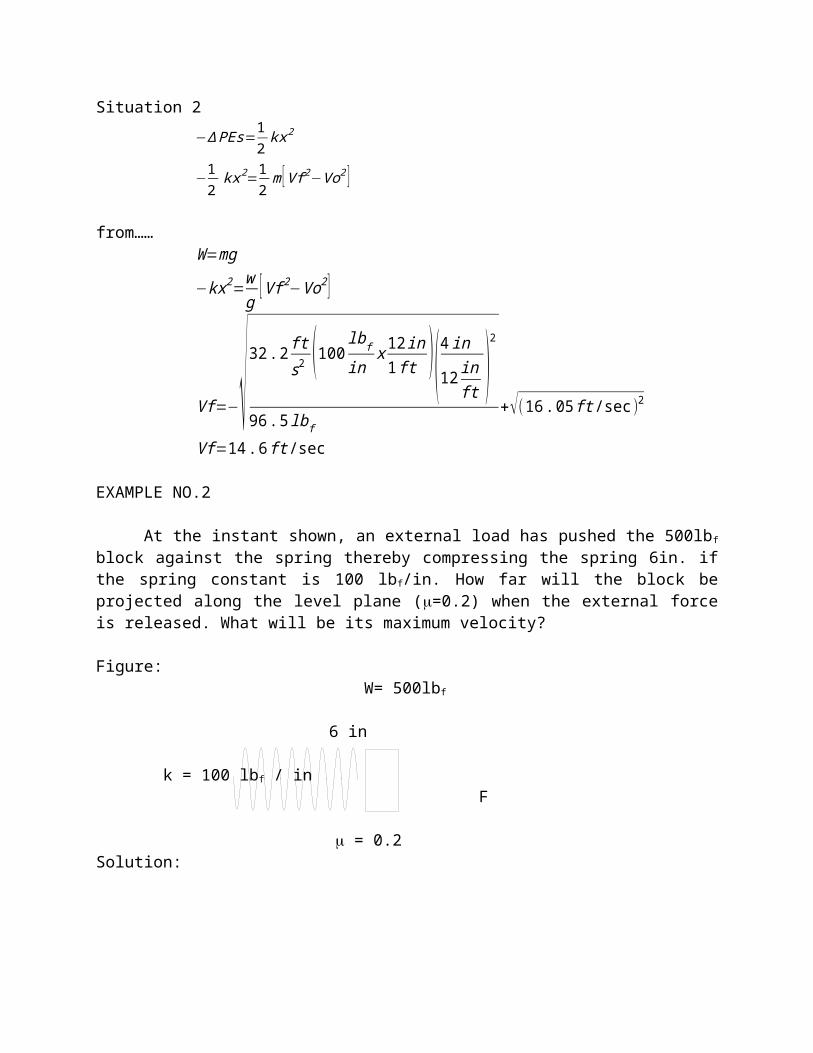
EXAMPLE NO.2
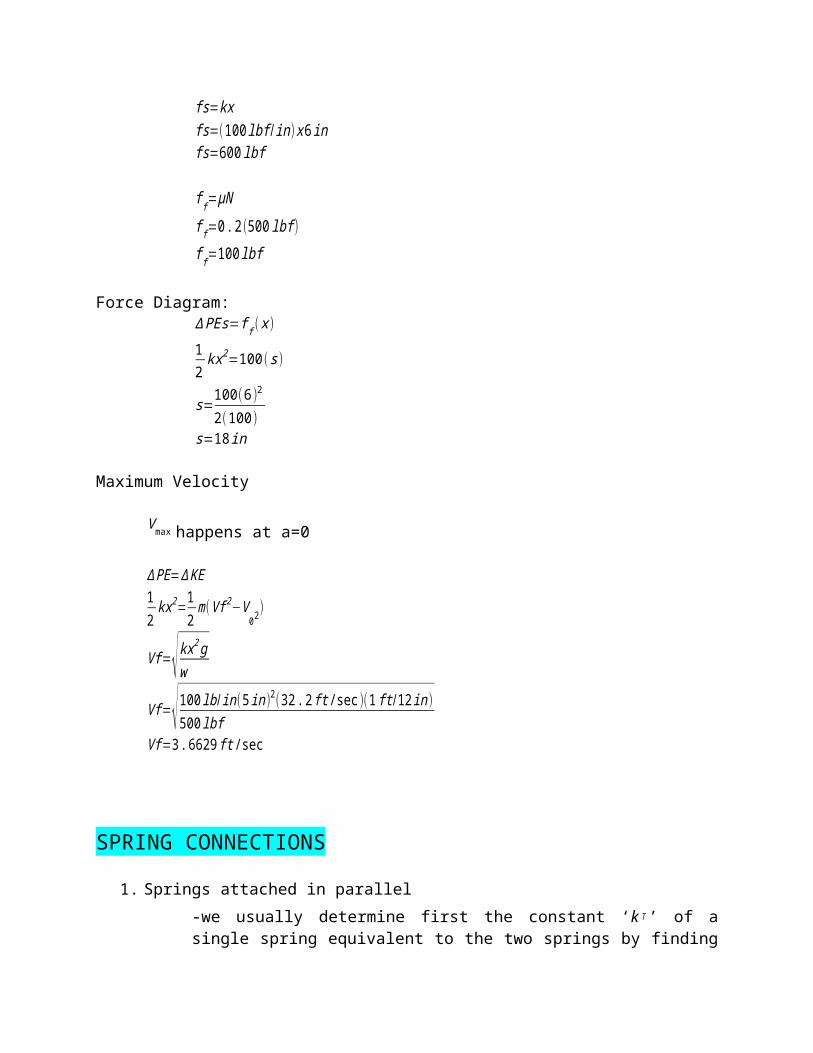
At the instant shown, an external load has pushed the 500lbf block against the spring thereby compressing the spring 6in. if the spring constant is 100 lb f/in. How far will the block be projected along the level plane (=0.2) when the external force is released. What will be its maximum velocity?
Figure: W= 500lbf
6 in
k = 100 lbf / inF
= 0.2Solution:
fs=kxfs=(100 lbf / in)x 6 infs=600 lbf
f f=μNf f=0 .2(500 lbf )f f=100 lbf
Force Diagram:Δ PEs=f f ( x )12
kx 2=100(s )
s=100(6 )2
2(100)s=18in
Maximum Velocity
V max happens at a=0
Δ PE=Δ KE12
kx 2=12
m(Vf 2−V02)
Vf =√kx 2 gw
Vf =√100 lb /in(5 in )2(32 .2 ft /sec )(1 ft /12in )500 lbf
Vf =3 .6629 ft /sec
SPRING CONNECTIONS
1. Springs attached in parallel
-we usually determine first the constant ‘kT ’ of a single spring equivalent to the two springs by finding the magnitude of the force required to cause a given
deflection ( XT ). Since for a deflection (XT ), the magnitude of the forces exerted
by the spring are k 1 XT and k 2 XT respectively, then:
Force ( F ) = k 1 XT + k 2 XT = (k1+k2 ) XT
thus: k T=k1+k2
where: k T = spring constant for the springs connected in parallel
2. Spring attached in series
-we first determine the constant ‘k T ’ of a single spring equivalent to the two
spring by finding the total elongation, ( XT ) of the spring under a given static load P.
Given:
XT=X1+ X2
P=kX
XT=Pk1
+Pk2
Comparison In Parallel In Series
Equivalentspring constant
Compresseddistance
Energystored
EXAMPLE:
A 50kg block moves between vertical guides as shown. The block is pulled 40mm down from its equilibrium position and released. For each spring arrangement, determine the period of vibration, the maximum velocity and maximum acceleration of the block.
a. Parallel Connection:
Figure:
k 1=4
kNm
k 2=6kNm
XT=X1=X 2
amplitude

Solution:P=kT XT=k1 X1+k2 X2
P=(k1+k2 ) XT
PXT
=k 1+k2=k T
k T=4kNm
+6kNm
k T=10kNm
Solving for ( w ):
ω=√kT
m
ω=√10kNm
(1 kg . mN .sec2
)(1000 N / KN )
50 kgω=14 .14 rad /sec
Thus:
a.)T=2 π
w= 2 π
14 . 14=0 . 44 sec
b.)V max=wA=14 .14 (0 . 04 m)=0. 57
msec
c.)amax=w2 A=(14 . 14 )2(0 . 04 m)=8
m
sec2
b. Series Connection
Figure:
k 1=4
kNm
k 2=6
kNm
50 kg W

Solution:
From:
XT=Pk1
+Pk2
= 4 cm
XT=P[1k1
+1k2 ]
P=XT
1k1
+1k2
P=0.0414
+16
P=. 096 kNP=96 N
Since:k T=
PXT
=96 N0 .04
=2 , 400Nm
or
k T=1
1k1
+1k 2
= 11
4000+
16000
=2 , 400Nm
Solving for ( ω ):
w=√ kT
m=√2400
50=6 . 93
radsec
thus:
a.) T=2 π
ω= 2 π
6 . 93=0 .91sec
b.) V max=ωA=6 . 93(0 .04 )=0 . 28
msec
c.) amax=w2 A=6 .932(0 .04 )=1 .92
m
sec2

SIMPLE HARMONIC MOTION
A.Equilibrium Position
ƩFh = 0 ma = 0
since the block is at rest
-xB.
ƩFh = fs’ fs = fs’ k(-xs) = ma
a=− km
x
fs’ (+)Where the negative sign denotes the initial displacement of the block to the negative x-axis
C.) x
ƩFh = fs’fs = -fs’kx = -ma
a=− km
x
(-) fs’

From calculus
Velocity (v) =
dxdt
Acceleration (a) =d2 x
dt2
Thus:d2 xdt2
=− km
x ; let : ω2 = km
Then:d2 xdt2
=−ω2 x
Where: ω - angular velocity in radians/s
From SHM:
x= A cos (θ + φ ) where ω=θt
x= A cos ( ωt + φ )
Then:
Velocity ( v )=dx
dt=−ωA sin (ω t+ϕ)
Acceleration ( a )=d2 x
dt 2=−ω2 A cos (ωt+φ )
Where:
A – Amplitude ( m or ft )ω – Angular velocity ( rads/s )
Also:
Period (T) = 2π/ϖ

Frequency (f) = 1
T= ω
2 π or ω = 2πf
To have a maximum velocity: sin ωt + = ±1
Thus:
(ωt+φ ) = 900 orπ2
for +1
And:V max = (√ k
m ) A
To have a max acceleration: cos (ωt+φ ) = +1
Thus:
(ω t+φ ) = 0 or 1800 for + 1
And:Amax = ω2 A = k
mA
Example:
An object oscillates with SHM along the x-axis. Its position varies with time according to the eq. x = 4m cos (πt + π/4). Where t is in second and the angles in the parenthesis are in radian
a.) Determine the amplitude, frequency and period.b.) Calc. the vel. And acc. Of the object at any time (t)c.) Det. the position, velocity and acceleration of the object at t=1sd.) Det. the max speed and acceleration of the object.e.) Find the displacement of the object between t=0 and t=1s
Solution:a. From the general equation: x = A cos (ωt + ϕ)
A = 4m ϕ = π/4 ω = π
Frequency (f) = ω/2π = π/2π = ½
Period (T) = 1/f = 2 seconds

b. v =−ω A sin (ωt +φ ) =−π 4m sin(πt + π
4 )a =−ω2 A cos ( ωt +φ ) =−π 2 4 m cos (πt+ π
4 )
c.x = A cos (ωt +φ ) = 4 m cos (π (1 )+ π
4 ) =−2.83 m
v =−ω A sin (ωt +φ ) =−π 4m sin(π (1 )+ π4 )= 8.89
ms
a =−ω2 A cos ( ωt +φ ) =−π 2 4 m cos (π (1 )+ π4 ) = 27 . 9
m
s2
d.vmax = ω A= π 4 m = 12.57
ms
amax = ω2 A =π2 4m = 39 .48m
s2
e.x i = 4 m cos ((0 )+ π
4 ) = 2 .83 m
x f = 4 m cos (π (1 )+ π4 ) =−2. 83 m
Then:Δx = x f− xi =−2 .83 m−2.83 m =−5 . 66 m
A
π/4 5π/4

ENERGY OF THE SIMPLE HARMONIC MOTION
Assumption: the total mechanical energy of a spring-mass system is constant.
Kinetic Energy (KE)
KE= 12
mV 2
Where:V = ϖ A sin (ϖt + ϕ)
Then:KE = ½ m ϖ2 A2 sin2 (ϖt + ϕ)
Elastic Potential Energy (U)Wk= U= f s (x ) where : f s = k x
∫ dU=∫1
2k x dx
Δ U= k∫1
2x dx
Δ U= 12
k x2
Total Mechanical Energy (E)
E= KE+ U where : x = A cos (ωt + φ ) and V = ω A sin (ωt + φ )
E= 12
m ω2 A2 sin2 (ωt + ϕ ) + 12
k A2 cos2 (ωt + φ )
Since:
ω2 =km
E= 12
k A2 [sin2 ( ωt + φ ) + cos2 (ωt + φ ) ]
E=12
k A2 =12
m V max2 =
12
mω2 A2
Also:

V 2= kA 2−kx2
m
V= −+ √k
m( A2−x2)
V= ω−+ √( A2−x2 )
ASSIGNMENT NO. 2
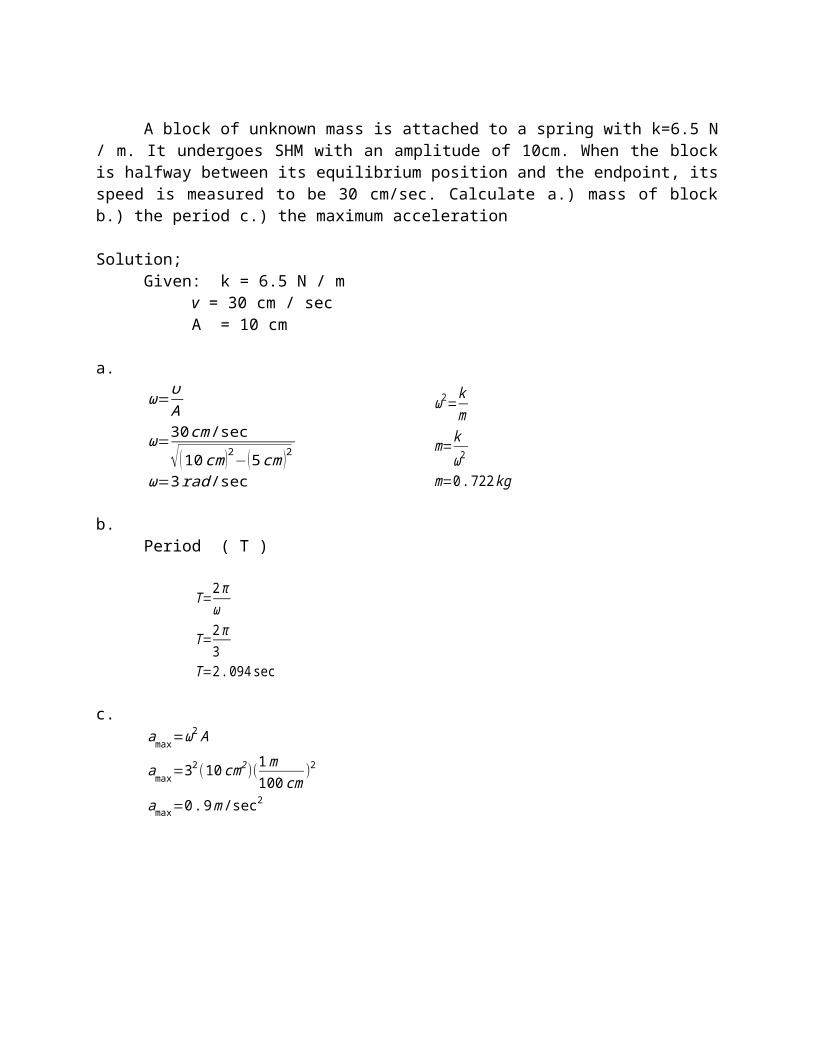
A block of unknown mass is attached to a spring with k=6.5 N / m. It undergoes SHM with an amplitude of 10cm. When the block is halfway between its equilibrium position and the endpoint, its speed is measured to be 30 cm/sec. Calculate a.) mass of block b.) the period c.) the maximum acceleration
Solution;Given: k = 6.5 N / m
v = 30 cm / secA = 10 cm
a.
ω=υA
ω=30 cm /sec
√ (10 cm )2− (5 cm )2
ω=3 rad /sec
ω2=km
m=kω2
m=0 . 722 kg
b. Period ( T )
T=2 πω
T=2 π3
T=2 .094 sec
c.amax=ω2 A
amax=32 (10 cm2 )(1 m100 cm
)2
amax=0 . 9 m /sec2

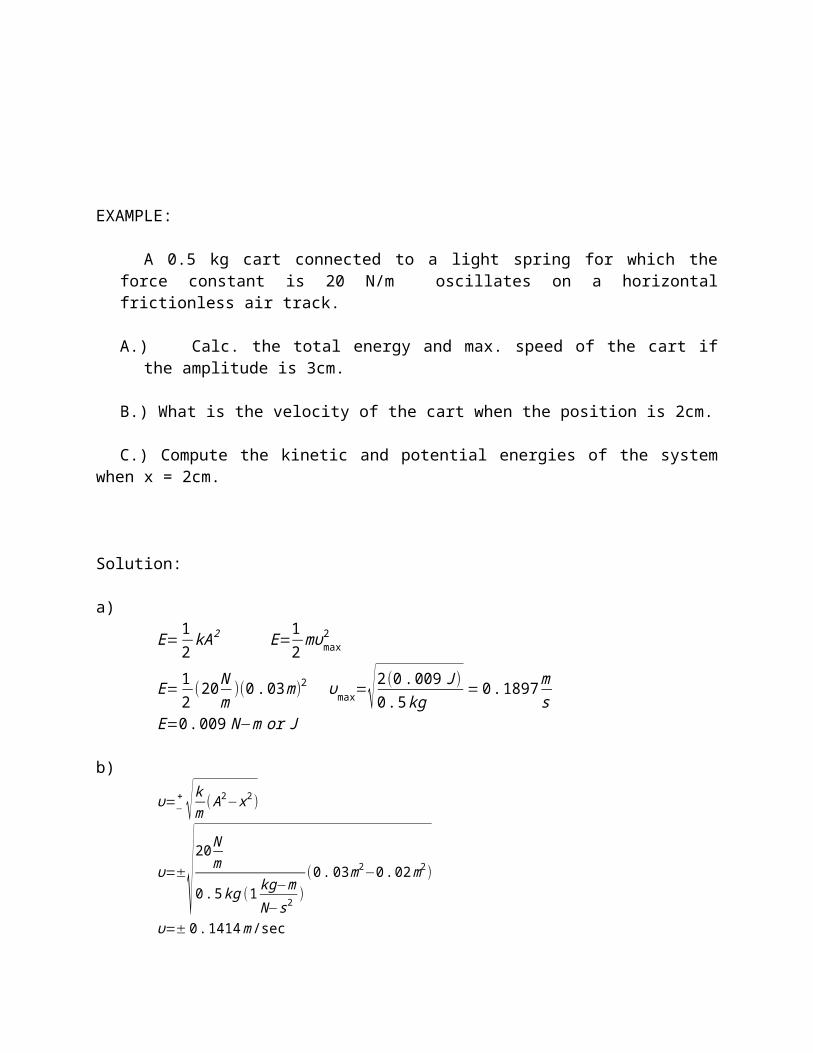
EXAMPLE:
A 0.5 kg cart connected to a light spring for which the force constant is 20 N/m oscillates on a horizontal frictionless air track.
A.) Calc. the total energy and max. speed of the cart if the amplitude is 3cm.
B.) What is the velocity of the cart when the position is 2cm.
C.) Compute the kinetic and potential energies of the system when x = 2cm.
Solution:
a)
E=12
kA2 E=12
mυmax2
E= 12
(20Nm
)(0 .03 m)2 υmax=√2(0 . 009 J )0 .5kg
= 0 .1897ms
E=0 .009 N−m or J
b)
υ=−+ √k
m( A2−x2 )
υ=±√20Nm
0 . 5 kg (1kg−mN−s2
)(0 .03 m2−0 . 02m2 )
υ=± 0. 1414 m /sec

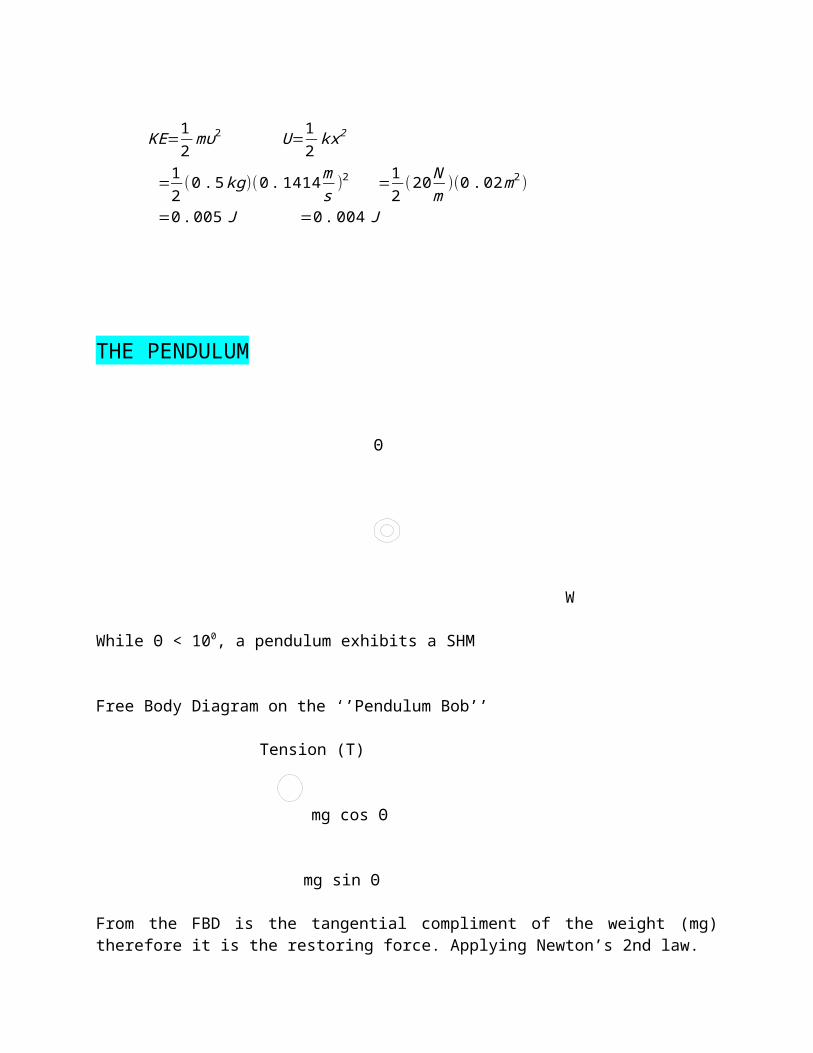
KE=12
mυ2 U=12
kx 2
=12
(0 . 5kg )(0. 1414ms
)2 =12
(20Nm
)(0 .02 m2 )
=0 . 005 J =0 . 004 J
THE PENDULUM
ϴ
W
While ϴ < 100, a pendulum exhibits a SHM
Free Body Diagram on the ‘’Pendulum Bob’’
Tension (T)
mg cos ϴ
mg sin ϴ
From the FBD is the tangential compliment of the weight (mg) therefore it is the restoring force. Applying Newton’s 2nd law.
ma=−mgsin θ
Where:ma = unbalanced forcem = mass of bobg = gravitational acceleration
In another form:
M {d2 sdt 2 }=−mg sinθ
Where: S=Lθ
Thus:
m(Ld2 θdt 2 )=−mg sin θ
d2 θdt 2
=−gL
sin θ
Since: sine of very small angle is equal to the angle it self.
Example: Sin (0.0001) = 0.0001
Then:d2 θdt 2
=− gL
θ
Comparing this with:d2 θdt 2
=−ω2 x
We see that:
ω2= gL
Thus the angular frequency (w)
ω=√ g
L
The period of rotation is
T=2 πω
=2 π √ Lg
Note: the period and frequency depends on the length of string and acceleration due to gravity.
Example 1
It is suggested that an international unit of length could be defined as the length of a single pendulum having a period of exactly 1 second. How much shorter would our length unit be had this suggestion been followed?
Solution:
From T = 2π √ L
G
T2=
4 π2 Lg
L =
12(9 .81)4 π2
L = 0.248 m
EXAMPLE 2
The angular position of a pendulum is represented by the equation = 0.32 rad cos (wt) , where w=4.43 rad / sec. Determine the period and length of the pendulum?
Solution:
ω = √ gL also:
T =
2 π rad4 .43 rad /sec
(ω=√ gL )
2
T = 1.42 sec
L =
9 .81 m /sec
(4 . 43 rad /sec )2
L = 0.4994 m
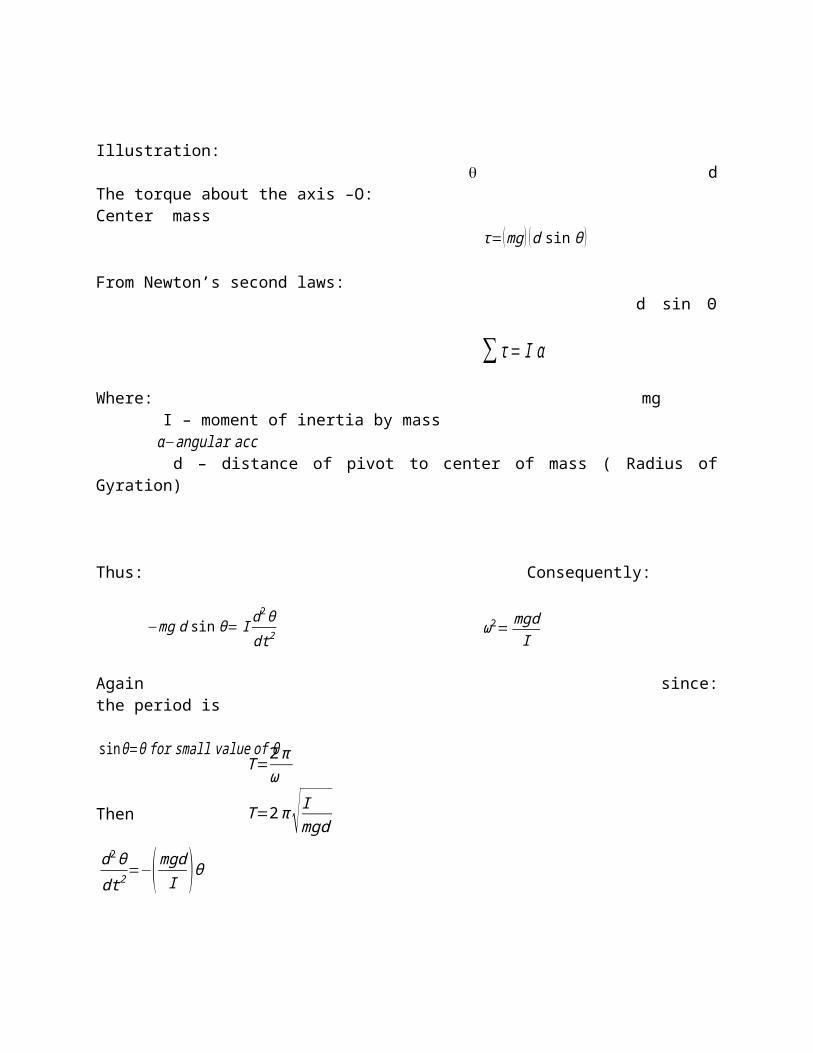
PHYSICAL PENDULUM
If a hanging object oscillates about a fixed axis that does not pass through its center of mass and the object cannot be approximated as a point mass, we cannot treat the system as a simple pendulum. In this case the system is called a physical pendulum.
Illustration:
d The torque about the axis –O:Center mass
τ=(mg ) (d sin θ ) From Newton’s second laws: d sin ϴ
∑ τ = I α
Where: mg I – moment of inertia by mass
α−angular acc d – distance of pivot to center of mass ( Radius of Gyration)
Thus: Consequently:
−mg d sin θ= Id2 θdt 2 ω2= mgd
I
Again since: the period is

Then
d2θdt2
=−( mgdI )θ
Comparing this to:
d2 θdt2
=ω2 θ
EXAMPLE 1
A uniform rod of mass m and length L is pivoted about one end and oscillates in vertical plane. Find the period of oscillation if the amplitude of the motion is small.
SOLUTION:
I =
mL2
3 where: d =
L2
Thus : T = 2 π √ I
mgd
T = 2 π √ 1/3(mL2 )
mg ( L/2)
T = 2 π √ 2 L
3 g
EXAMPLE 2:
T=2 πω
T=2 π √ Imgd
sin θ=θ for small value of θ

A physical pendulum in the form of planar body moves in SHM with a frequency of 0.45 Hz. If the pendulum has a mass of 2.2 kg and the pivot is located 0.35 m from the center of mass, determine the amount of inertia of the pendulum.
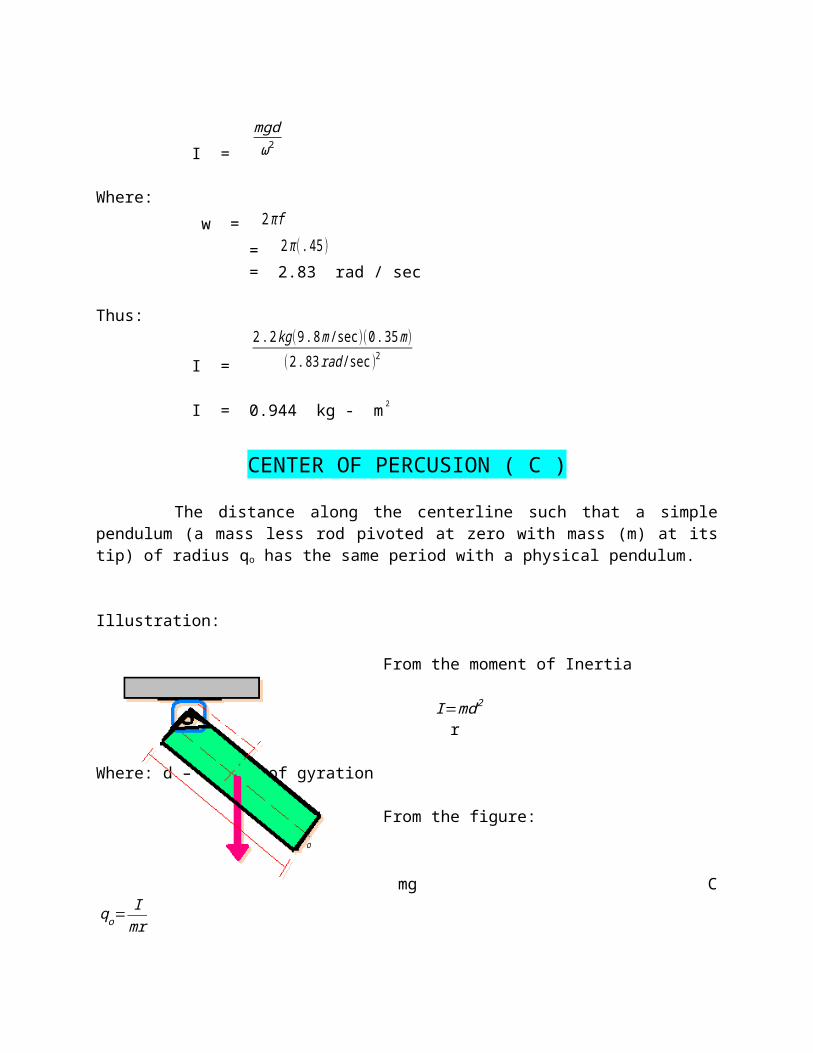
SOLUTION:
I =
mgd
ω2
Where:
w = 2πf
= 2 π ( . 45) = 2.83 rad / sec
Thus:
I =
2. 2 kg( 9. 8 m /sec )(0 .35 m)(2. 83 rad /sec)2
I = 0.944 kg - m2
CENTER OF PERCUSION ( C )
The distance along the centerline such that a simple pendulum (a mass less rod pivoted at zero with mass (m) at its tip) of radius qo has the same period with a physical pendulum.
Illustration:
From the moment of Inertia
I=md2
r Where: d – radius of gyration
From the figure:
qo
mg C
qo=I
mr
Thus:

I=Imd2=qo mr
qo r=d2
So that:
Id2θdt2
+mgr θ=0
and
ωn=√mgrI
In terms of center of percussion:
ω=√ gqo
COMMON MOMENT OF INERTIA
A. About the center radial
1. Solid Cylinder or Disc
I=12
mr2
r
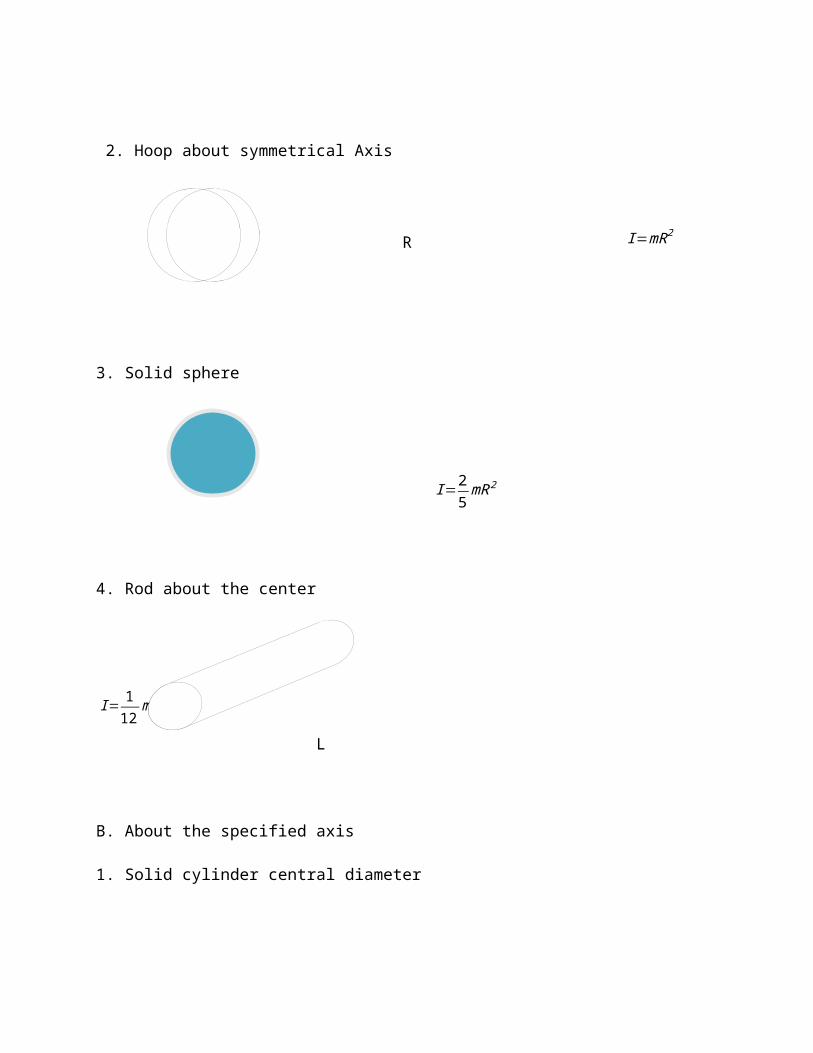
2. Hoop about symmetrical Axis
R I=mR 2
3. Solid sphere
I=25
mR 2
4. Rod about the center
I= 1
12mL2
L
B. About the specified axis
1. Solid cylinder central diameter
rI=1
4mR2+ 1
RmL2
L
2. Hoop about diameter
I=1
2mR 2
3. Thin spherical shell
I=23
mR 2
4. Rod about End
I=13
mL2
L
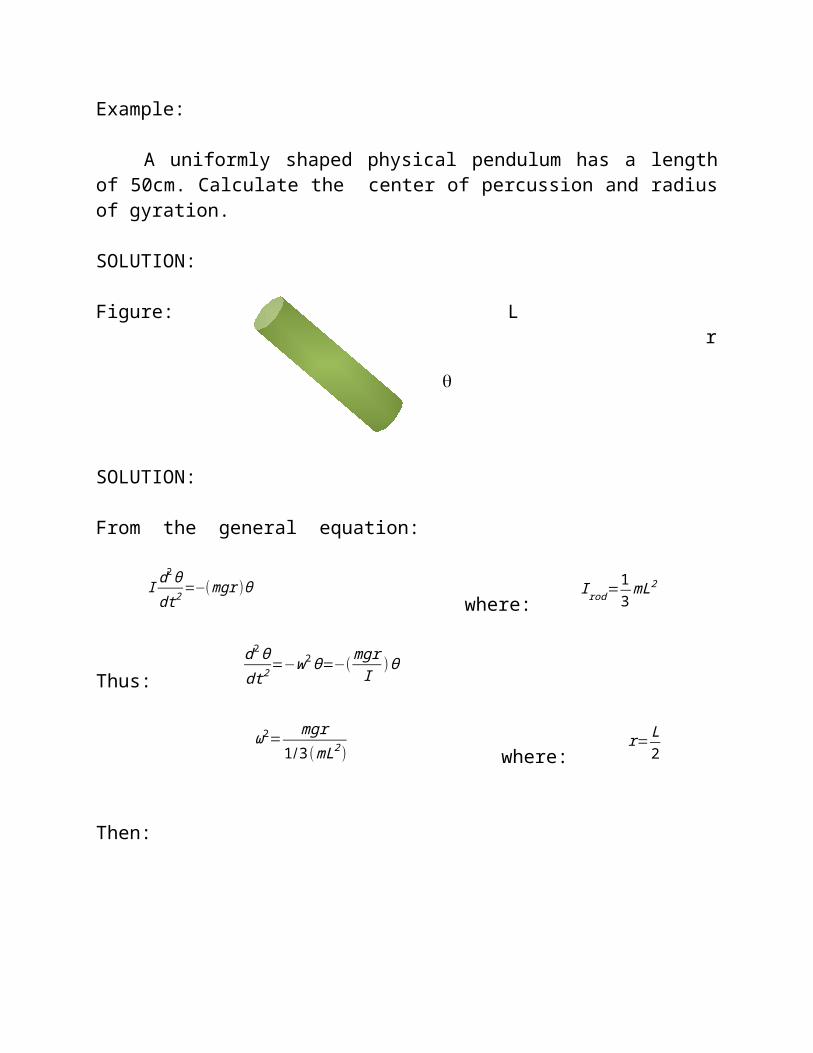
Example:
A uniformly shaped physical pendulum has a length of 50cm. Calculate the center of percussion and radius of gyration.
SOLUTION:
Figure: L r
SOLUTION:
From the general equation:
Id2 θdt2
=−(mgr )θ where:
I rod=13
mL2
Thus:
d2 θdt2
=−w2 θ=−( mgrI
)θ
ω2= mgr
1/3(mL2 ) where: r=L
2
Then:
ω2=mg(L /2 )(1/3)(mL2 )
ω2=3 g2 L
ω=√3(9 . 8m /sec )2(0 .5 m )
ω=5 . 425 rad /sec
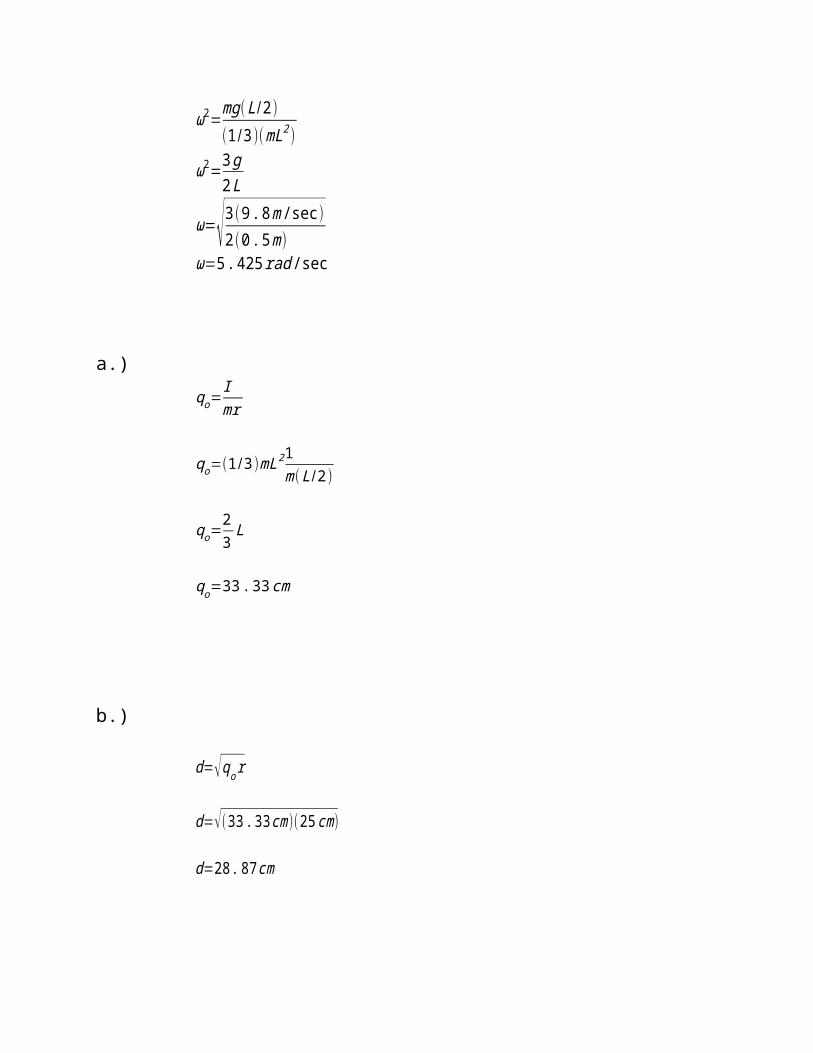
a.)
qo=Imr
qo=(1/3 )mL21m( L/2)
qo=23
L
qo=33 .33 cm
b.)
d=√qo r
d=√(33.33 cm)(25 cm )
d=28. 87 cm
TORSIONAL PENDULUM
When the object is twisted through same angle , the twisted wire exert on the object restoring torque that is proportional to the angular position
τ=−kθ
Where: k - torsional constantϴ - Twisting angle
Thus:
τ=−kθ=Id2 θdt2
Rearranging the equation:
d2 θdt2
=− kI
θ
Then:
ω2= kI
ω=√ kI
And
T=2 π √ Ik
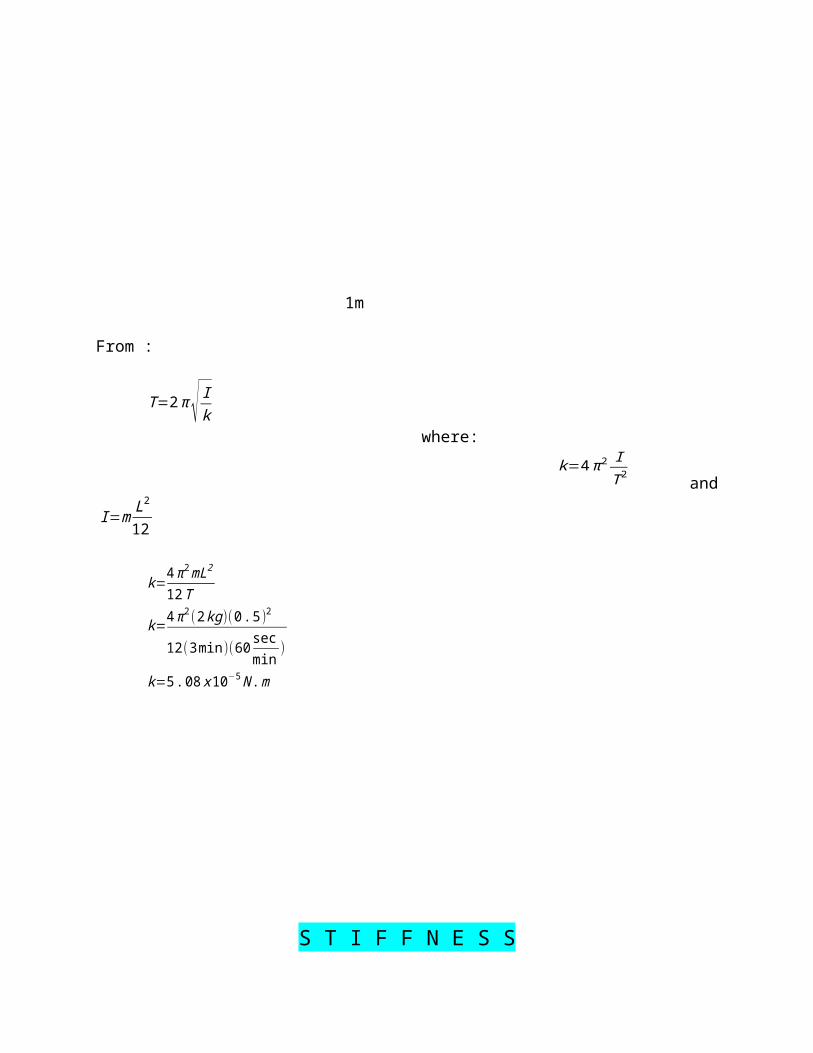
EXAMPLE:
A torsional pendulum is formed by taking a meter stick of mass 2 kg and attached to its center a wire with its upper end clamped, the vertical wire supports the stick as it turn in a horizontal plane. If the resulting period is 3 mins, what is the torsional constant for the wire?
Solution: Figure

1m
From :
T=2 π √ Ik
where:
k=4 π 2 I
T 2 and
I=mL2
12
k=4 π 2 mL2
12T
k=4 π 2(2 kg )(0 .5 )2
12(3 min )(60secmin
)
k=5 .08 x 10−5 N . m
S T I F F N E S S
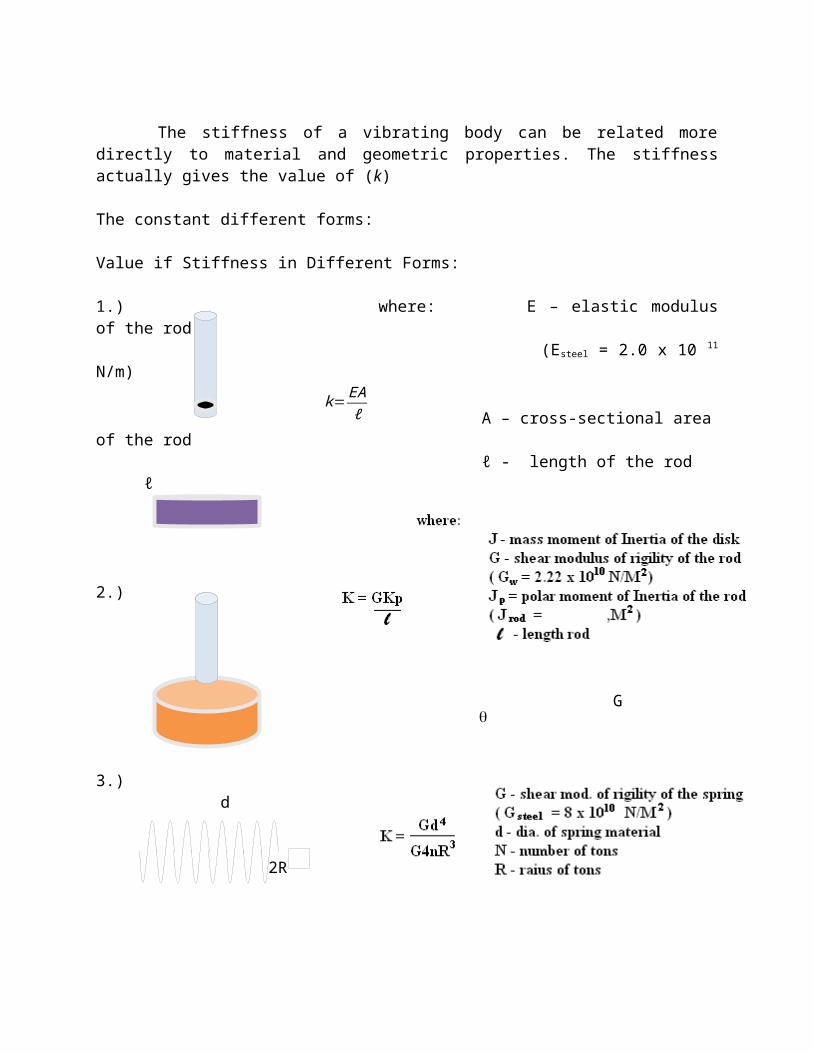
The stiffness of a vibrating body can be related more directly to material and geometric properties. The stiffness actually gives the value of (k)
The constant different forms:
Value if Stiffness in Different Forms: 1.) where: E – elastic modulus of the rod
(Esteel = 2.0 x 10 11 N/m)
k=EAℓ A – cross-sectional area of the rod
ℓ - length of the rod
ℓ
2.)
G
3.) d
2R
4.)
DAMPED OSCILLATION
In many real systems, non-conservative forces, such as friction, retard the motion consequently, the mechanical energy of the system diminishes ion time, and the motion is said to be damped. Because the retarding forces can be expressed as R = -bv (where b is constant called the damping coefficient. )
From:
md2 xdt 2
+bdxdt
+kx=0
d2 x
dt 2+b
mdxdt
+km
x=0 Equation 1
Let: 2 γ= b
m ;
β2= km
Using the auxiliary equation
D2+2 γD+β2=0
From quadratic equation:
D=−2∂±√(2∂)2−2B2
2
Let:
δ2=β2−γ2
Then:
D=−2 γ±√22 (γ 2−β2 )2
D=−γ±√γ 2−β2
D =−γ±√−δD1=−γ +iδD2=−γ−iδ
Using auxiliary eq. (imaginary roots)
x ( t )=C1e−γt sin δt+C2e−γt cos δt - GENERAL SOLUTION
From initial value problem, where at t = 0 ; x ( 0 ) = A
x (0 )=C1 e−γ(0) sin δ (0 )+C2e−γ(0 )cosδ (0)C2=A
Thus:
x ( t )=Ae−γt cos δt - Particular Solution of Equation 1

EXAMPLE:
A pendulum with a length of 1m is released from an initial angle of 15 . After 1sec, the amplitude has been released by friction to 5.5. what is the value of b / 2m ? What is the damped frequency?
Solution:
θ( t )=Ae−γt cos( δt )
Where at t = 0
θ(0 )=Ae−γ(0 )cos(δ(0 ))150=Ae0 cos0A=150
At t = 1 sec
θ(1 )=150 e−γ(1)cos (δ (1 ))5 .50=150e−γ cos (δ(1 ))
e−γ=5.515
−γ=ln5 . 515
γ=1 .0033=b2 L
For the damped frequency
Ld2 θdt 2
+bdθdt
+gθ=0
Using the auxiliary equation:
LD 2+bD+g=0
From quadratic equation:
D=−b±√b2−4 Lg
2 L
Where:

ωd=√b2−4 Lg
2 L :ω
d2=b2−4 Lg(2L )2
Thus:
ωd=√( b2 L
)2− gL
Reversing the position of the terms inside the radical sign:
W d=√gL
−(b2 L
)2
W d=√9 .811
−(1 . 0033)2
W d=2 .965radsec
DAMPING RATIO
From:
mdx2
dt2+b
dxdt
+k=0
mD2+bD+k=0 Where : b = damping coefficient
using the quadratic formula:
D2+ bm
D+ km
=0
The roots are:
D=− b2 m
± 12 m
√b2−4 mk- Equation 1
The determinant (√b2−4 mk ) will indicate the general solution of the differential equation
Thus:
Critical damping coefficient ( bcr=√4 mk=2√mk
)
and so the damping ratio ( ξ )
ξ= bbcr
= b2√mk
Where: m = massk = spring constant
Since:
W o=√ k
m - Multiplying both side by ( m )
(mωo=m√km )
2
m2 ωo
2=m2 km
mωo=√mk
Then:
ξ= b2 mωo
Orb
2m=ξωo
- Equation 2
Also from the damped angular frequency:
ω d =√km
−(b2m )2
ω d =√ω02−(b2m )
2
ω d =√ωo2−(ξω0 )2
ω d =√ωo
2(1−ξωo )2
ω d =ωo √1−ξ2 - Equation 3 (True Equation)
Note that equation 3 is the true while ξ is less than 1.
In case where ξ is greater than 1, then:
ωd=√b2−4 mk2 m
ωd2=
b(2 m)2
−4 mk(2 m)2
And since:
b2m
=ξωo
km
=ωo2
ωd=√ (ξωo )2−ωo
ωd=ωo√ξ−1 - Equation 4
Substituting Equation 2 and Equation 4 to Equation 1
D−−ξωo±ωo √ξ−1 - Equation 5

Using this equation to evaluate the damped vibration, three cases will arise.
Case 1. 0 <ξ < 1For this case, the quantity inside the radical sign will give an imaginary root, thus using
the auxiliary equation for imaginary roots.
D=−ξωo±ωd i - where: ( i = √−1 )
The general solution is:
x ( t )=e−ξωo t
(C1 sin ωd t +C2cos ωd t )+ψt
Case 2. ξ 1 - over damped motion
For this case, the determination of equation 5 is positive, thus, it yields to:
D=−ξω0±ωo √ξ2−1
And the general solution is:
x ( t )=e−ξωo t
(a1 e−ωo√ξ2−1
+a2eωo√ξ2−1
)
Where:
a1=−υo+(−ξ+√ξ2−1 )ωo xo
2 ωo√ξ2−1
a2=υo+(ξ+√ξ2−1)ωo xo
2 ωo√ξ2−1
Case 3. ξ = 1 - critically dampedFor this case, equation 3 is reduced to
D=−ωo
And the general solution is:

x ( t )=e−ωo t
(a1+a2t )
Where:
a1=xo
a2=υo+ωo xo
EXAMPLE
A spring is such that it would stretch 6in by a 12lbf weight. Let the weight be attached to the spring and pulled down 4in below the equilibrium point. If the weight is started with an upward velocity of 2 ft / sec with a damping force of magnitude 0.6 V. Determine the displacement x(t) after 1.5 sec.
Given:
6 inEquilibrium
4 in
V o=−2
ftsec
Solution
a. Damping ratio
ξ= bbcr
= b2√mk
Where:b = 0.6
W =mgo
gc ;

m=12 lbf (1
slug . ft
lbf . sec2 )32 .2
ft
sec2
m=0 .37 slug
k=Fx
=12 lbf
6 in (1 ft12in )
k=24lbfft
Thus:
ξ=0 . 62√0 .37 (24 )
ξ=0 . 1007
Since 0 ξ 1 ; solution will come from Case 1
Where:
ωo=√km
ωo=√240 .37
ωo=8 . 054radsec
Solving for C1 and C2 :
At t = 0 ;
x (0 )=4 in (1 ft /12 in )x (0 )=0 .33 ft
x (0 )=eξωo(0) [C1sin ωd(0 )+C2cos ωd( 0)]
C2=0. 33
At t = 0 ; v(0)=−2 ft /sec

x ( t )=C1 eξωo( t)
sin ωd t+C2 e−ξω
otcos ωd t
υ (0 )=C1 [ e−0.811(0)cos (8 .013(0 ))8 .013−sin 8 . 013(0 )e−0 .811( t)−(0 .811)]+C2 [e−. 0811( t )(−sin 8 .013 t )(8 . 013 )+cos8 . 013 t(e−0 .811( t))0. 811 ]
υ (0 )=[C1e−0. 811(0 )cos(8 .013(0 ))8 . 013−C2 e−0. 811(0 )cos8 . 013(0 )(−0 . 811 )]−[C1 e−0 .811 (0 )sin(8 .013(0 ))8 .013+C2 e−0 .811(0)sin 8 . 013(0 )(0 .811)]
υ (0)=C1 (8 .013 )−C2(0 . 811)
−2ftsec
=C1(8 .013)−C2 (0 .811)
−2ftsec
=C1(8 .013)−0 .33 (0. 811)
C1=−0. 216
So
x ( t )=e−0 .811t [ 0.33 cos8 . 013 t−0 .216 sin 8. 013 t ]x (1. 5 )=e−0.811 (1 .5 ) [0 .33 cos 8. 013(1 .5 )−0.216 sin 8 . 013(1. 5 )]x (1. 5 )=0 .12 ft