vehicle specific traversability analysis of pathways · road examples potholes and open gutters ......
TRANSCRIPT

Muhammad Mudassir KhanPhD Student in Electrical Engineering,
SBA School of Science and Engineering, LUMS
Vehicle Specific Traversability Analysis of Pathways
Joint project: Abubakr Muhammad (LUMS) and Haider Ali (DLR)

31/07/2015 WFAR-8, Schloss Dagstuhl 2
Nearly 1.3 million people die in road
crashes each year.
An additional
20-50 million are injured or disabled.
Road crashes cost USD $518 billion
globally.
Over 90% of all road fatalities occur in low
and middle-income countries.
Road injuries are predicted to become the
5th leading cause of death by 2030.
Statistics of Road AccidentsWorld Health Organization (WHO) data

31/07/2015 WFAR-8, Schloss Dagstuhl 3
“On a Crash Course: The dangers and health costs of deficient roadways”, a survey by The Pacific Institute for Research and Evaluation.
Effect of Road Conditions 52.7% deaths in road casualties were caused by road conditions in US. Road accidents due to road conditions cost U.S. economy more than $217 billion
each year. Road accident casualties in developing countries due to road conditions are 73
times more than that of developed countries.

4
Reduce Casualties from Road Accidents
Solution: Methodology:
Equip every vehicle with advanced technologies.
Pre-record road information and store it
50% of the crashes can be prevented by advanced technologies (Kingsley et. al. 2009).
8–25% fatal crash reduction with advisory system (WHO World Report on Road Traffic Injury Prevention).
Scientists are aiming at nearly 100% crash prevention with autonomous vehicles. (Google Autonomous Car)

31/07/2015 WFAR-8, Schloss Dagstuhl 5
Route Planning Software Given start and destination:
Generate a shortest route from start to destination Same route for all vehicle types No information about whether the route is safe for vehicle or not

31/07/2015 WFAR-8, Schloss Dagstuhl 6
Disaster Scenario Send help to disaster effected area Find beforehand whether road is safe or not

31/07/2015 WFAR-8, Schloss Dagstuhl 7
Scenario 1 Vehicle 1 can drive through the road Vehicle 2 can not drive through road, no matter what
maneuver it takes

31/07/2015 WFAR-8, Schloss Dagstuhl 8
Scenario 2 Vehicle 1 can not drive through road. Vehicle 2 can drive through road with some maneuvers, keeping to left of the road.

31/07/2015 WFAR-8, Schloss Dagstuhl 9
Given 3D data of road, some vehicle parameters and vehicle motion constraints, compute how safe it is for the vehicle to drive on that road.
Assign a value indicating safety of road for the vehicle. Practically usable index
Problem

31/07/2015 WFAR-8, Schloss Dagstuhl 10
Proposed Framework

31/07/2015 WFAR-8, Schloss Dagstuhl 11
Each data frame consists of RGBD pointcloud
RGB-D sensor directed towards road surface
Robot Operating System (ROS) on Ubuntu
Data stored in the form of ROSBAG
Sensing System

31/07/2015 WFAR-8, Schloss Dagstuhl 12
Pre-processing using PCL filters Remove outliers Crop pointcloud to remove unwanted region
Pre Processing

31/07/2015 WFAR-8, Schloss Dagstuhl 13
Road Model
Vehicle Parameters
Configurations Space
Collision Checking
Probabilistic Roadmaps (PRM)
Interaction between vehicle and road.
Motion Planning

31/07/2015 WFAR-8, Schloss Dagstuhl 14
Road Model
Assume road as a planar surface. Extract road parameters by plane fitting on
pointcloud using RANSAC. Plane parameters from equation
Find distance of each point from road using equation:
d iroad> thobs
ax+by+cz+d=0pi
If , point is obstacle.
Red are obstacle and green are part of road.

31/07/2015 WFAR-8, Schloss Dagstuhl 15
Anything that hinders the motion of vehicle. Two types:
Negative obstacles are depressions in the road
Examples potholes and open gutters
Positive obstacles are humps or anything above surface of the road
Examples: speed breakers and roadblocks
Obstacles

31/07/2015 WFAR-8, Schloss Dagstuhl 16
Find interaction of vehicle with road model.
Length: Length of the vehicle Width: Width of the vehicle Ground Clearance: Distance
between vehicle and road. Wheelbase: distance between
center of front and back tires Track: distance between center of
back tires Contact patch of the tire with road
Tire width Tire length in contact with road
Vehicle Parameters

31/07/2015 WFAR-8, Schloss Dagstuhl 17
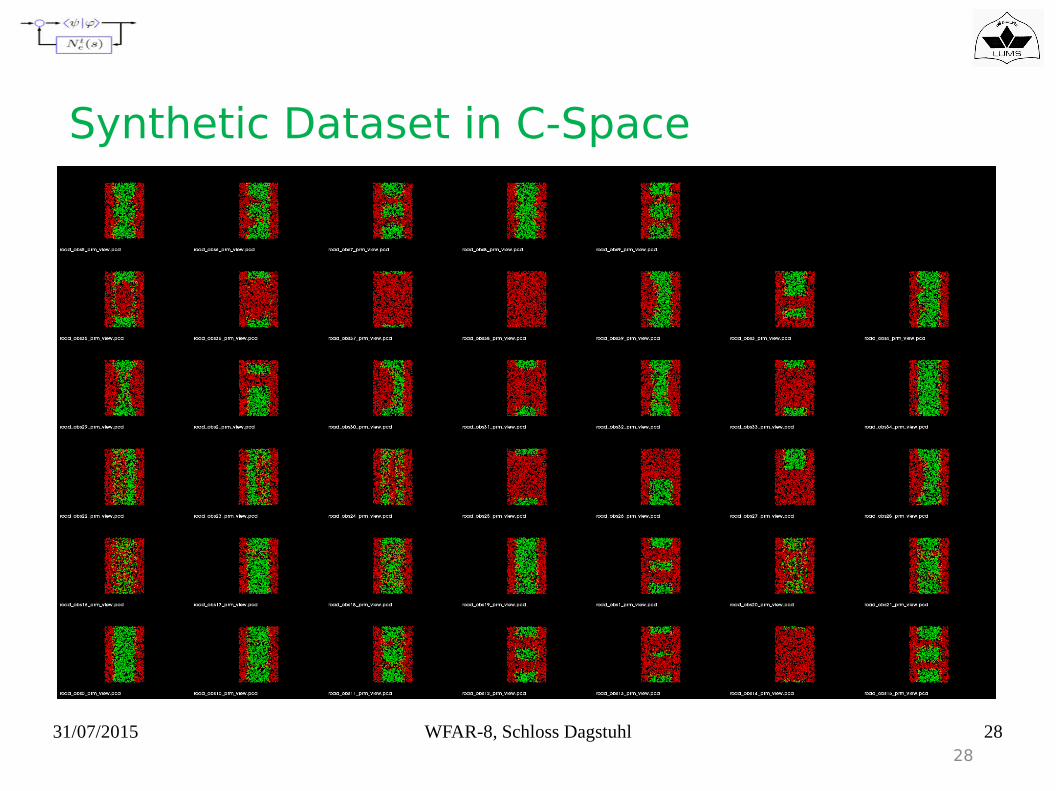
Minimum no of variables needed to uniquely identify vehicle configuration. All possible interactions between vehicle and road. is the 5-Dimensional C-Space of our vehicle. Collision checking is performed to find valid and invalid configurations.
Configurations Space

31/07/2015 WFAR-8, Schloss Dagstuhl 18
Whether vehicle collide with any obstacle or not. Valid:
No collision with obstacle. Vehicle is in stable condition.
Invalid Configuration: Any of vehicle’s tires collide with obstacle. Any of vehicle’s tire is outside road boundary. Vehicle body collide with obstacle. Vehicle does not obey stability constraints.
Collision Checking in 3D pointcloud

31/07/2015 WFAR-8, Schloss Dagstuhl 19
Radius search is an approximation of bounding
box
Approximate the tire contact patch with a circle or
radius Tirewidth/2.
Project original pointcloud on road plane
Find all pointcloud points in the radius Tirewidth/2 of
the center of tire on road.
Find distance of each point from road surface.
If percentage of valid points is greater than some
threshold for all tires then it’s a valid vehicle
configuration.
Collision checking for negative obstacles

31/07/2015 WFAR-8, Schloss Dagstuhl 20
Kernel based full body model
Represent the vehicle by a box
Find all pointcloud points in the vox
Find distance of each point from road surface.
If percentage of valid points is greater than some
threshold for all tires then it’s a valid vehicle
configuration.
Collision checking for Positive obstacles

31/07/2015 WFAR-8, Schloss Dagstuhl 21
Probabilitic Roadmaps (PRM)
PRM is an approximation of CSpace. PRM is a graph where each node is a random
configuration and each edge is a valid path. Two nodes and are connected in G is both are valid
and there is no invalid configuration between them that is invalid.

31/07/2015 WFAR-8, Schloss Dagstuhl 22
Given road data, divide it into smaller patches. Traversability is defined as no of unique paths from start to
the end of each road patch
Generate adjacency matrix of PRM graph . Study properties of the PRM graph using its
adjacency matrix. Use graph theoretic concepts like maxflow/mincut and
connected component analysis to perform traversability analysis.
Traversability Analysis

31/07/2015 WFAR-8, Schloss Dagstuhl 2323
Road Traversability Index (RTI)
Pointclouds
Configuration Space
• RTI is a mapping from PRM graph to a real value between
• RTI=0, if there is no path from start to end of road patch. Fig (c)
• RTI=1, if all possible paths exist from start to end. Fig (a)
• Anything in between shows relative traversability.

31/07/2015 WFAR-8, Schloss Dagstuhl 2424
Road Traversability Index (RTI)
Road Patch• Identify start S, intermediate I and goal F configurations.
• Find all connected components Gi in G.
• Perform maxflow/mincut on every connected component from start S to goal F configurations.

31/07/2015 WFAR-8, Schloss Dagstuhl 2525
• RTI of a connected component
• is an indicator function, returns 0 if no start S or goal F configurations are
in the connected component.
• is the mincut of the nominal road with no obstacle.
• Putting everything together, we get
RTI Equation
1(Gi)

31/07/2015 WFAR-8, Schloss Dagstuhl 2626
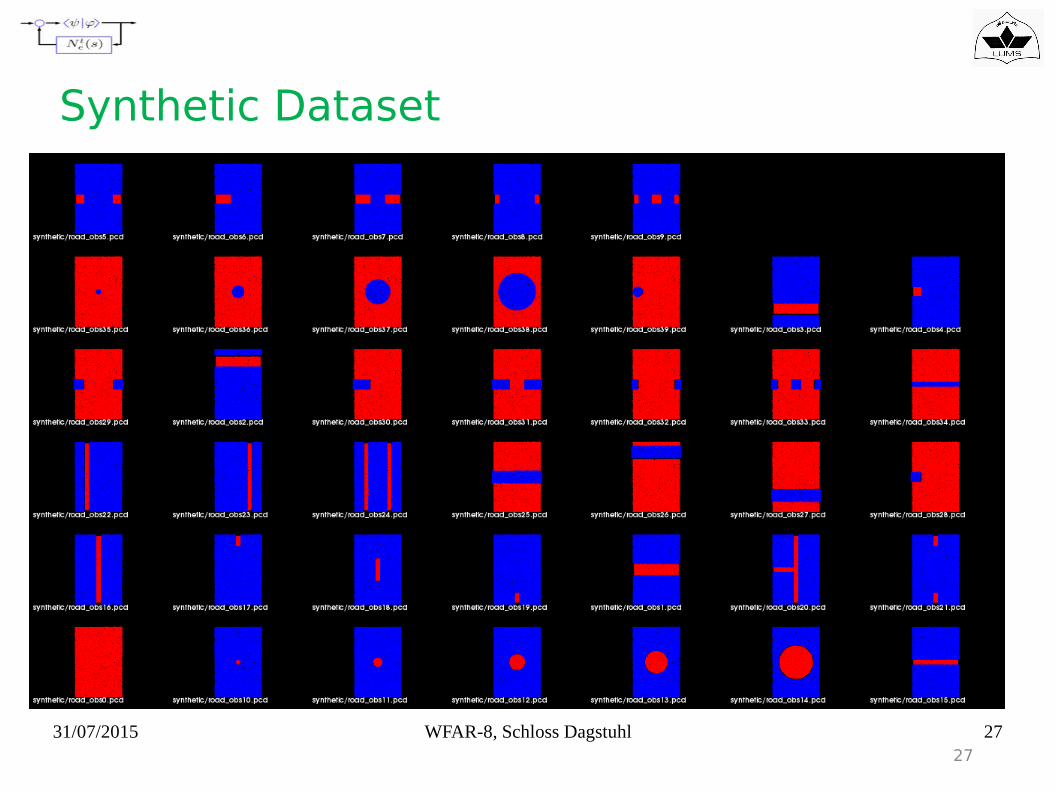
Experiment and Results
• Perform RTI analysis on synthetic and field road data• Each synthetic road patch is 4x6 meters capturing different scenarios.• Field data was captured using our sensing system.• Each pointcloud in field data is 2x3 meters.• We used vehicle parameters as shown in table on right.
31/07/2015 WFAR-8, Schloss Dagstuhl 2727
Synthetic Dataset
31/07/2015 WFAR-8, Schloss Dagstuhl 2828
Synthetic Dataset in C-Space

31/07/2015 WFAR-8, Schloss Dagstuhl 29
Probabilitic Roadmaps (PRM) Graph
Traversable Road Non-Traversable Road

31/07/2015 WFAR-8, Schloss Dagstuhl 3030
Synthetic Dataset Results
5 10 15 20 25 30 35Frame

31/07/2015 WFAR-8, Schloss Dagstuhl 31
Comparison with ground truth

31/07/2015 WFAR-8, Schloss Dagstuhl 32
Difference with ground truth

31/07/2015 WFAR-8, Schloss Dagstuhl 33
Field Experiments
33

31/07/2015 WFAR-8, Schloss Dagstuhl 34
Field Experiments Result
34

31/07/2015 WFAR-8, Schloss Dagstuhl 35
Original pointcloud Plane segmentation Configuration Space
Challenges
Planar road model is not ideal in real roads.
31/07/2015 WFAR-8, Schloss Dagstuhl 36
Application Scenarios
• Road Repair using RTI• Find best possible road deteriorations to repair with
limited resources.• Repair spots that has maximum RTI impact.
• Shortest Route• Like google maps a mapping system that gives
shortest route based on vehicle traversability maximization.
• Rescue operations in disaster• Aerial vehicle to record road data• Process for different available vehicles• Send the one that can traverse the damaged road.
31/07/2015 WFAR-8, Schloss Dagstuhl 37
Future Work
● Improve road model● Kinematic Stability Constraints● Dynamic Stability Constraints● Fast collision checking● Stitching pointclouds to get detailed road information

31/07/2015 WFAR-8, Schloss Dagstuhl 38
• Framework for vehicle specific traversability analysis of roads.• Graph and Network properties for traversability instead of using
search algorithms to find actual paths.• A novel human readable metric RTI to indicate how safe a road is
for the vehicle.
Conclusion

31/07/2015 WFAR-8, Schloss Dagstuhl 39
Thanks