vector symbol decoding
TRANSCRIPT

The Pennsylvania State University
The Graduate School
Department of Electrical Engineering
VECTOR SYMBOL DECODING WITH LISTS OF ALTERNATIVE VECTOR
SYMBOL CHOICES AND OUTER CONVOLUTIONAL CODES
A Thesis in
Electrical Engineering
by
Usana Tuntoolavest
Submitted in Partial Fulfillment of the Requirements
for the Degree of
Doctor of Philosophy
May 2002

We approve the thesis of Usana Tuntoolavest.
Date of Signature
John J. Metzner Professor of Electrical Engineering Professor of Computer Science and Engineering Thesis Advisor Chair of Committee
Mohsen Kavehrad Professor of Electrical Engineering
David J. Miller Associate Professor of Electrical Engineering
George Kesidis Associate Professor of Electrical Engineering
Associate Professor of Computer Science and Engineering
Guohong Cao Assistant Professor of Computer Science and Engineering
Kenneth Jenkins Professor of Electrical Engineering Head of the department of Electrical Engineering

ABSTRACT
Error correcting codes can play a key role in improving the efficiency and
reliability of digital communications. One way to simplify the decoder is by using
concatenated codes. Reed-Solomon codes have been popular as an outer code of
concatenated codes because they provide maximum minimum-distance (dmin) between
code words. However, Vector Symbol Decoding (VSD) for block outer codes has been
shown to achieve, in many cases, a better decoding success probability than Reed-
Solomon code decoding.
In this thesis, we present Vector Symbol Decoding (VSD) with list of alternative
vector symbol choices as a relatively simple and high performance decoding technique
for convolutional outer codes. The convolutional VSD technique has the advantage over
the block VSD technique in that most corrections are almost immediate based on
observation of only one or a few syndromes. (Some error events require consideration of
significantly larger numbers of syndromes, however.) The list decoding also improves the
performance and often simplifies the decoding. To implement VSD, the knowledge of the
parity check matrix is essential. A method for computing the parity check matrix for (n-
1)/n nonsystematic convolutional codes is presented. One main assumption of VSD is
that the error symbols are linearly independent, which usually is true for large symbol
size (24-bit, 32-bit or more). The effect of symbol size on the performance of VSD is
investigated and a way to reduce the decoding failures for smaller symbol size (16-bit) is
described.

iv
The performance of VSD is compared to the Reed-Solomon code decoding for
various types of inner codes and channel conditions. One difficulty in the comparison is
that VSD usually deals with a much larger vector symbol size than the Reed-Solomon
code decoding. In practice, Reed-Solomon codes are interleaved to handle larger symbol
size; thus, interleaved Reed-Solomon codes are also considered. Another difficulty in the
comparison is that Reed-Solomon codes are very effective for erasure symbols, but VSD
considered in this thesis can handle errors only. The decoding failure probability of VSD
with errors only is shown to be almost half an order of magnitude lower than that of
Reed-Solomon code with a mixture of errors and erasure for a special case of random
inner codes.
The decoding failure probability of VSD is evaluated by two computerized
approaches. The first one is by developing recursive equations based on the property of
the decoder. These equations are readily implemented in a computer program to find the
large vector upper bound performance. The second one is to simulate VSD directly to
compute the exact decoding failure probability. The upper bound is shown to be
extremely close to the simulation result. The decoding failure probability of VSD is
considerably lower than the Reed-Solomon code in most cases.
To gain more insight on VSD, another set of equations is derived to find the
average number of syndromes needed for each successful decoding for the First
Information Block (FIB). It is discovered that only a few syndromes are needed on
average and therefore, the average complexity is relatively low.

TABLE OF CONTENTS
LIST OF FIGURES......................................................................................................viii
LIST OF TABLES .......................................................................................................x
ACKNOWLEDGMENTS............................................................................................xi
Chapter 1 INTRODUCTION .......................................................................................1
1.1 Introduction .....................................................................................................1 1.2 Contributions of this Thesis ............................................................................8 1.3 Publications.....................................................................................................10
Chapter 2 BACKGROUND .........................................................................................11
2.1 Block Codes and Convolutional Codes ..........................................................11 2.2 Concatenated Codes........................................................................................12 2.3 BCH Codes and Reed-Solomon Codes...........................................................13 2.4 List Decoding ..................................................................................................16 2.5 Maximum-Likelihood Decoding and Viterbi Algorithm................................17 2.6 List Viterbi Algorithm (LVA).........................................................................19
Chapter 3 CONCEPT OF VECTOR SYMBOL DECODING (VSD).........................28
3.1 Vector Symbol Decoding for Block Codes.....................................................29 3.2 Vector Symbol Decoding for (n-1)/n Convolutional Codes ...........................34 3.3 VSD with Lists of Alternative Symbol Choices .............................................37 3.4 A Decoding Example for a (2,1,2) Convolutional Code (with 2
Alternative Choices): .....................................................................................39 3.5 Parity Check Matrix for (n-1)/n Nonsystematic Convolutional Codes...........42 3.6 Details of Steps in Decoding with VSD and Lists of 2 for (n-1)/n
Convolutional Codes......................................................................................49 3.7 Availability of Alternative Choices ................................................................52
Chapter 4 VECTOR SYMBOLS .................................................................................54
4.1 Concatenated Code with a Convolutional Inner Code....................................55 4.1.1 In a Simplified Two-State Fading Channel...........................................56 4.1.2 In an AWGN (Additive White Gaussian Noise) Channel ....................57

vi
4.1.3 In a Rayleigh Fading with AWGN Channel .........................................59 4.2 Concatenated Code with a Random Inner Code in a Simplified Two-State
Fading Channel ..............................................................................................62 4.3 Spread Spectrum in Channel with Interference...............................................66
4.3.1 Fast Frequency Hopping Spread Spectrum ............................................66 4.3.2 Time-hopping spread spectrum..............................................................69
Chapter 5 ERROR STATISTICS OF VECTOR SYMBOLS......................................71
5.1 A Convolutional Inner Code in a Simplified Two-State Fading Channel ......71 5.2 A Convolutional Inner Code in an AWGN (Additive White Gaussian
Noise) Channel ..............................................................................................74 5.3 A Convolutional Inner Code in a Rayleigh Fading with AWGN Channel .....75 5.4 A Random Inner Code in a Simplified Two-State Fading Channel................77 5.5 Fast Frequency-Hopping Spread Spectrum in Channel with Interferences ....79
Chapter 6 RECURSIVE METHOD FOR EVALUATING LARGE VECTOR UPPERBOUND PERFORMANCE OF VSD ......................................................85
6.1 Compute tNs(w) and tN(w) (the Weight Structure): ........................................86 6.2 Find Pe(w) (the Probability of Failure due to Covering Exactly One
Particular Code word of Weight w): ..............................................................93 6.3 Find Pu (the Large Vector Union Upper Bound Decoding Failure
Probability): ...................................................................................................93
Chapter 7 COMPARISON PERFORMANCE WITH NON-INTERLEAVED REED-SOLOMON CODES .................................................................................95
7.1 Methods...........................................................................................................95 7.1.1 Effect of the Size of Vector Symbols on Performance of VSD............97 7.1.2 Probability of Decoding Failure of Reed-Solomon Codes with a
Mixture of Errors and Erasures for Random Inner Codes in the Two-State Fading Channel..............................................................................101
7.1.3 A Note on Implementing the VSD Program.........................................105 7.2 Results.............................................................................................................106
7.2.1 Result of Large Vector Union Upper Bound Decoding Failure Probability...............................................................................................107
7.2.2 Results of VSD in Comparison with the Non-Interleaved Reed-Solomon Code ........................................................................................109 7.2.2.1 A Convolutional Inner Code in a Simplified Two-State
Fading Channel................................................................................110 7.2.2.2 A Random Inner Code in a Simplified Two-State Fading
Channel with 2 Cases of Reed-Solomon Code: Errors Only and a Mixture of Errors and Erasures.....................................................112

vii
7.2.2.3 Fast Frequency-Hopping System in a Channel with Interference......................................................................................114
7.2.3 Results on the effect of symbol size on VSD .......................................116
Chapter 8 INTERLEAVED REED-SOLOMON CODES ...........................................129
8.1 Examples of Relationship between the Symbol Error Probabilities of the Vector Symbols and their Subblocks.............................................................131
8.2 Results of VSD in Comparison with the Interleaved Reed-Solomon Code....139 8.2.1 A Convolutional Inner Code in a Simplified Two-State Fading
Channel ...................................................................................................139 8.2.2 A Convolutional Inner Code in an AWGN Channel ............................140 8.2.3 A Convolutional Inner Code in a Rayleigh Fading with AWGN
Channel ...................................................................................................141
Chapter 9 METHOD & RESULTS ON PERFORMANCE OF VSD FOR FIRST INFORMATION BLOCK (FIB)...........................................................................145
9.1 Compute tNs(w) and tN’(w) (the Weight Structure):.......................................147 9.2 Find Union Upper Bound on Ft and Ft
np : .......................................................148
9.3 Find tPsynd (Probability of Failure to Decode FIB Using a Maximum of t Syndromes): ...................................................................................................150
9.4 Expected Number of Syndromes Used in Decoding FIB: ..............................150 9.5 Complexity of VSD with Maximum of tmax Syndromes:................................151 9.6 Complexity Comparison between VSD and RS Decoder...............................152 9.7 Results of Decoding Failure Probability for FIB ............................................155
Chapter 10 DISCUSSIONS & CONCLUSIONS.........................................................161
Chapter 11 FUTURE WORK ......................................................................................170
BIBLIOGRAPHY ........................................................................................................173

LIST OF FIGURES
Figure 2.1: The encoder circuit of a (2,1,2) convolutional code with G(D) = [(1+D2) (1+D+D2)].............................................................................................21
Figure 2.2: a) Binary-input, quaternary-output channel and b) its bit metric table, adapted from Figure 11.3 in [26]. .........................................................................22
Figure 2.3: Example of parallel LVA with L = 2. .......................................................24
Figure 3.1: First information blocks for the case that the decoder uses one syndrome and the case that it uses two syndromes ...............................................36
Figure 4.1: Demodulation and Square-law detection of binary FSK signal (adapted from Figure 5-4-3 in [47]) ......................................................................60
Figure 4.2: The fast frequency-hopping spread spectrum in use (n frequencies, r chips). ....................................................................................................................66
Figure 4.3: The equivalent time-hopping system (r blocks of t time units each). .......69
Figure 6.1: An interval of the trellis diagram for the (2,1,2) code. The number(s) of each transition path represent a) output values and b) the number of output “1” .........................................................................................................................87
Figure 7.1: Comparison between the upper bound and the computer simulated perforamnce of 32-bit symbol VSD......................................................................119
Figure 7.2: Decoding failure probability of VSD and Non-interleaved Reed-Solomon code (32-bit symbols, convolutional inner code, 2-state fading channel) .................................................................................................................120
Figure 7.3: Post-decoded symbol error probability of VSD and Non-interleaved Reed-Solomon code (32-bit symbols, convolutional inner code, 2-state fading channel) .................................................................................................................121
Figure 7.4: Effect of quality of second choice on decoding failure probability of VSD.......................................................................................................................122

ix
Figure 7.5: Effect of quality of second choice on post-decoded symbol error probability of VSD................................................................................................123
Figure 7.6: Decoding failure probability of VSD and Non-interleaved Reed-Solomon code with errors only and a mixture of errors and erasures (32-bit symbols, random inner code, 2-state fading channel) ...........................................124
Figure 7.7: Post-decoded symbol error probability of VSD and Non-interleaved Reed-Solomon code (32-bit symbols, random inner code, 2-state fading channel) .................................................................................................................125
Figure 7.8: Decoding failure probability of VSD and Non-interleaved Reed-Solomon code (15-bit symbols, frequency-hopping, 60 users, 9 chips/row, efficiency = 0.389) ................................................................................................126
Figure 7.9: Post-decoded symbol error probability of VSD and Non-interleaved Reed-Solomon code (15-bit symbols, frequency-hopping, 60 users, 9 chips/row, efficiency = 0.389)...............................................................................127
Figure 7.10: Effect of vector symbol size on the decoding failure probability of VSD.......................................................................................................................128
Figure 8.1: The binary symmetric channel with probability pe that a received bit is erroneous. ..............................................................................................................132
Figure 8.2: Decoding failure probability of VSD (24-bit symbols) and Interleaved Reed-Solomon code (8-bit subblocks), 2-state fading channel.............................142
Figure 8.3: Decoding failure probability of VSD (24-bit symbols) and Interleaved Reed-Solomon code (8-bit subblocks), AWGN channel. .....................................143
Figure 8.4: Decoding failure probability of VSD (24-bit symbols) and Interleaved Reed-Solomon code (8-bit subblocks), Rayleigh fading with AWGN channel....144
Figure 9.1: Performance of VSD for a (2,1,2) convolutional outer code. (exact values for 1 and 2 syndromes cases, upper bound for others)...............................157
Figure 9.2: Average number of syndromes used in VSD for a (2,1,2) convolutional outer code. ......................................................................................158
Figure 9.3: Expected somplexity of VSD (relative to the one syndrome case) for a (2,1,2) convolutional outer code. ..........................................................................159
Figure 9.4: Effect of the quality of the second choice on the performance of VSD....160 (Do not type text in this document beyond here)

LIST OF TABLES
Table 5.1: Error statistics of vector symbols from simulations of a (2,1,4) convolutional inner code with LVA in two-state independent fading channel: a) 32-bit symbols, and b) 24-bit symbols. .............................................................73
Table 5.2: Error statistics of 24-bit vector symbols from simulations of a (2,1,4) convolutional inner code with LVA in AWGN channel.......................................74
Table 5.3: Error statistics of 24-bit vector symbols from simulations of a (2,1,4) convolutional inner code with LVA in a Rayleigh fading with AWGN channel ..................................................................................................................76
Table 5.4: Error statistics of 32-bit vector symbols from analytical result of a (72,32) randomly chosen code in two-state fading channel..................................78
Table 5.5: Error statistics of 15-bit vector symbols from simulation result of fast frequency-hopping spread spectrum in channel with interferences. a) 60 users, 9 chips/row, efficiency = 0.389 bits/chip, b) 60 users, 10 chips/row, efficiency = 0.350 bits/chip, c) 70 users, 10 chips/row, efficiency = 0.409 bits/chip, and d) 80 users, 12 chips/row, efficiency = 0.389 bits/chip. .................81
Table 6.1: Weight Distribution of the (3,2,2) convolutional code ...............................90
Table 8.1: Comparison of symbol error probability for 8-bit subblock and 24-bit symbol using a (2,1,4) convolutional code with dfree = 5 ......................................133
Table 8.2: Comparison of symbol error probability for 8-bit subblock and 16-bit symbol using the (31,16) three-error-correcting BCH code in binary symmetric channel. ...............................................................................................135
Table 8.3: Comparison of symbol error probability using a (2,1,5) convolutional code with dfree = 8 in binary symmetric channel. ..................................................136

ACKNOWLEDGMENTS
I am very grateful to Dr. John J. Metzner, my thesis advisor, for his excellent
advice, his guidance and his support during this research. Without him, this thesis
research could not have been completed.
I would like to thank the committee members: Dr. Mohsen Kavehrad, Dr. David
J. Miller, Dr. George Kesidis of the Department of Electrical Engineering and Dr.
Guohong Cao of the Department of Computer Science and Engineering for their valuable
time to serve as my doctoral committee.
I would like to express a special appreciation to my parents for their love, their
support and for giving me the opportunity to pursue my doctoral degree. Finally, I owe a
special thank to my husband, Munruk Tuntoolavest, for his love, support and
encouragement throughout this research.

Chapter 1
INTRODUCTION
1.1 Introduction
Reliable digital communication is an important aspect of communications
engineering. It is especially important and challenging for wireless channels because the
channel is random and time-varying. There are many ways to reduce the probability of
error at the receiver. Space diversity is usually employed by using multiple receiving
antennas [1,2,3,4]. Recently, Tarokh, Seshadri and Calderbank proposed space-time
codes, which used both multiple transmitting and receiving antennas [5,6]. In addition to
diversity, powerful error correcting codes are often used.
When information is transmitted, it is desired to be received correctly at the
receiver. However, many factors such as noises and interferences can affect the
information while it is being transferred. Suppose the information is random and can be
anything. If what is transmitted is purely the information, there is no way that the receiver
will know whether the information is correct. To overcome this problem, the transmitter
can send some additional redundancy data that are derived from the information. The
receiver will calculate the redundancy data by the received information. If the calculated
and the received redundancy data do not match, errors are detected. This technique is

2
called “error detection”. When the errors are detected, the receiver may request a
retransmission.
If the receiver is able to correct at least some types of errors (i.e., an error
correcting code is used at the receiver), the number of retransmission requests will be
reduced significantly. Efficient encoding and decoding techniques are possible based on
the Shannon paper in 1948 [7], which showed that with proper encoding of information,
the probability of error could be reduced to any level at any rate below channel capacity.
Unfortunately, he did not suggest any practical way to achieve this. After his paper, a lot
of research has been done on finding efficient encoding and decoding methods. However,
almost all of the high performance codes, such as turbo codes [8] and codes based on
ordered statistics [9], have the tradeoff of high complexity. One way to reduce the
complexity of the channel encoder and decoder is to use concatenated codes, which were
first proposed by Forney [10]. A simple concatenated code normally consists of an inner
code and an outer code. The inner code can be a simple code that brings the probability of
error down to a certain level. Then, the outer code will bring it further down to the
required value.
Vector Symbol Decoding (VSD) is very powerful for both block and
convolutional outer codes. It is capable of correcting a large number of nonbinary error
symbols even beyond the error correction bounds guaranteed by a maximum distance
code (Reed-Solomon code) [11], which is the most popular outer code. Reed-Solomon
codes have the maximum possible minimum Hamming distance (dmin) and a guaranteed
correction capability that they can correct all cases of (dmin-1)/2 or fewer error symbols.

3
Note that,, the terms “Reed-Solomon codes” and “maximum distance codes” are used
interchangeably in this thesis. VSD do not have the feature of guaranteed correction
capability, so it cannot correct some cases of fewer error symbols while it can correct
other cases of more error symbols. However, the average decoding failure probability of
VSD is lower than that of Reed-Solomon code decoder that corrects up to the guaranteed
correction capability in many conditions. This is because the high minimum Hamming
distance is not as important for the nonbinary symbols as for the binary symbols.
Consider two binary code words. They must be different in at least dmin positions
(or bits). If one of the bits in the position that they differ is wrong, this will bring the
received sequence closer to the wrong code word by one position. This is because a bit
has only two values and when it is wrong, its value is changed from “0” to “1” or “1” to
“0”. Next, consider two nonbinary code words. Suppose each symbol is an r-bit sequence
(i.e., the symbols are from GF(2r)). Since each symbol position has nonbinary value, the
two code words usually have different values in all positions especially when r is large.
When a symbol is wrong, it is unlikely that the error will make the symbol exactly the
same as the symbol value of the other code word at the same position especially when r is
large. Thus, this error rarely brings the received sequence closer to the wrong code word.
As a result, nonbinary codes can have good performance with relatively low dmin.
It is important to note that VSD is a decoding algorithm while Reed-Solomon
code is a type of code. In the comparison in this thesis, the performance of VSD with a
convolutional outer code is compared to the performance of Reed-Solomon code
decoding with a Reed-Solomon code, where both have the same length and rate. For

4
brevity, the comparison is usually referred to as the comparison between VSD and Reed-
Solomon code. The actual Reed-Solomon code decoder is not considered since Reed-
Solomon codes have guaranteed error correction capability and its performance can be
discovered from this property. Some Reed-Solomon code decoding algorithms can be
found in [12,13].
VSD can be used with a general block or convolutional code. It normally works
with the assumption that certain sets of error symbols are linearly independent error
symbols. If necessary, the likelihood of independence can be increased by inner symbol
data scrambling [14]. In this scrambling method, a different transformation is applied for
each of the symbols at the encoder output and an appropriate transformation is applied at
the decoder input. Consequently, a pair of two identical error symbols is transformed into
linearly independent error symbols.
The assumption of linearly independent error symbols is usually justified for large
vector symbol size (24-bit or 32-bit or larger symbols). Since the decoder in this thesis
uses this assumption, it will have a considerably higher decoding failure probability for
smaller symbol size such as 16-bit symbols. Some of the decoding failures are due to the
wrong corrections that can be identified. Therefore, an extra step should be added in the
VSD to check them and prevent these wrong corrections. This extra step is also
described. In addition, the effect of different symbol size and the effect of adding this
extra step are shown.
The idea of VSD for block codes was first proposed by Metzner in [14] and
independently by Haslach and A. J. Han Vick in [15]. Metzner also proposed the idea of

5
list decoding for VSD in [16]. The idea of VSD for convolutional codes without the use
of list decoding was extended by Seo [17]. However, only systematic convolutional codes
with the exception of rate ½ nonsystematic convolutional codes were discussed. In
addition, the length of the convolutional codes was assumed to be infinite, and therefore
the decoding failure probability of a terminated block of convolutional codes and the
post-decoded symbol error probability were not discussed. Consequently, comparison
between the VSD and maximum distance code was not possible. The nonbinary (vector)
symbols were also provided by some special encoding techniques. Although VSD for
block codes has been compared with Reed-Solomon code, the comparison was not
entirely fair. This is because it was assumed that both methods used the same large vector
symbol size directly even though Reed-Solomon code for large symbol size is usually
implemented by interleaving many Reed-Solomon codes with smaller symbol size.
Furthermore, these previous papers only considered the outer block codes or outer
convolutional codes with some assumption on the properties of vector symbols. No
vector symbol sources were investigated.
In this thesis, the idea of VSD with lists of alternative symbol choices for general
convolutional codes is presented. With the use of list decoding, the performance of VSD
is improved and the decoding is often simplified. These alternative choices may come
from a system that uses macrodiversity and microdiversity [1,2], from inner code
decoders such as List Viterbi Decoding (LVA) [18,19,20], from frequency or time
hopping spread spectrum system [21,22]. Various sources of vector symbols are
investigated to find their error statistics, which are necessary in discovering the

6
performance of VSD. Vector symbols in consideration are obtained from a convolutional
inner code, a randomly chosen inner code or a frequency-hopping spread spectrum
system. The convolutional VSD is attractive because it can often make corrections as it
examines only a small part of the received sequence. Block decoding technique, in
general, needs the whole received sequence before it can make corrections. Note that,,
occasionally, when a lot of symbols are erroneous, the convolutional technique would
need a large part of the received sequence.
Although the principle of VSD is simple, its evaluation is difficult. Unlike most
other outer codes, its error correction ability is not expressible as being able to correct
only all errors up to a specified maximum number based on the minimum distance
between code words. Three main approaches are presented for evaluating the
performance of VSD.
1. Bounds on decoding failure probabilities of terminated convolutional outer
codes can be derived based on the weight structures of the code. This is nontrivial
because the weight structures of codes are highly complex, except for some special cases.
A relatively simple recursive method is shown to compute the weight structure of codes
and consequently, find the large vector upper bound decoding failure probability in
Chapter 6. This probability can be directly compared with the computer simulation result.
2. A computer simulation is done to find the exact probability of error by
selecting a particular inner code and a particular outer code. For this approach, the outer
decoder is implemented by computer simulation. Most inner decoders are also computer
simulated except for the randomly chosen inner code, which does not have a practical

7
decoder and is investigated analytically. The vector symbols are simulated in various
channels such as a simplified two state-fading channel, an Additive White Gaussian
Noise (AWGN) channel and a Rayleigh fading with AWGN channels. Various vector
symbol sources are considered such as a convolutional inner code, a randomly chosen
inner code, and a fast frequency-hopping spread spectrum system.
One main problem to implement VSD, the outer code decoder, is to discover the
parity check matrix. Parity check matrices for systematic convolutional codes are well
known. However, good convolutional codes are usually nonsystematic. A way to
compute parity check matrices for (n-1)/n nonsystematic convolutional codes is presented
in Chapter 3. The simulation results of VSD with lists of alternative symbol choices are
compared with the performance of Reed-Solomon codes in terms of decoding failure
probability and post-decoded symbol error probability. The comparison between VSD
and Reed-Solomon codes also presents a difficulty because VSD is suitable for large
vector size symbols, while Reed-Solomon code usually uses 8-bit symbols. To handle
larger symbol size, the common practice is to interleave many Reed-Solomon codes with
8-bit symbols each. Examples of interleaved Reed-Solomon codes can be found in
[23,24,25]. Comparisons are shown for both the case that VSD and Reed-Solomon codes
use the same large vector symbol directly and the case that Reed-Solomon codes are
interleaved to achieve the large vector symbol. The effect of the quality of second choices
on the performance of VSD is also illustrated.
Another difficulty in the comparison of VSD and maximum distance is the fact
that the maximum distance code is the best code for erasures, but VSD is assumed to be

8
able to handle errors only. Note that,, VSD can be extended to handle a mixture of errors
and erasures and some preliminary work on a special case is very recently done [26].
Further study is still needed. For random inner code in two-state fading channel, the
performance of Reed-Solomon code with a mixture of errors and erasures can be
computed analytically quite easily and it is shown in this thesis. A comparison is also
shown for VSD with errors only and Reed-Solomon with a mixture of errors and erasures
for this code and this channel.
3. Bounds on decoding failure probability of the first information block (FIB) and
the average number of syndromes needed for each successful decoding can also be
derived based on the weight structures of the code. For the large vector upper bound, the
code is assumed to be terminated, but for the decoding failure probability of FIB, the
code length is assumed to be infinite (no termination). These two approaches require
different derivations and provide different parameters. While the latter approach cannot
be compared directly with the simulation result, it gives some insight on the average
number of syndromes that the decoder uses for each successful decoding of a FIB and the
complexity of the decoder. The derivation is shown in Chapter 9.
1.2 Contributions of this Thesis
• Extend and improve VSD for convolutional codes by using the list of alternative
vector symbol choices

9
• Extend VSD for (n-1)/n nonsystematic convolutional codes by presenting a way
to compute the parity check matrix for (n-1)/n nonsystematic convolutional codes.
• Make it possible to compare convolutional VSD with maximum distance code by
considering terminated convolutional codes instead of the non-terminated ones.
• Improve the way to compare VSD and maximum distance codes by using
interleaved Reed-Solomon code instead of assuming that Reed-Solomon code
uses the same symbol size directly as done in the block VSD.
• Show that VSD with errors has a better performance than Reed-Solomon code
with a mixture of errors and erasures at least for a randomly chosen inner code in
the simplified two-state fading channel.
• Show that the performance of VSD is considerably better than the maximum
distance codes for various vector symbol sources and various channel conditions.
• Present a recursive method to find the weight structure of any convolutional codes
in general.
• Present an analytical method to find error statistics (symbol error probabilities) of
a randomly chosen code.
• Present a method to compute the large vector union upper bound decoding failure
probability of VSD and show that it is very close to the simulation result.
• Present a way to gain some insight on the complexity of the VSD in terms of
average number of syndromes needed for each successful decoding.
• Justify the validity of the linearly independent assumption by showing the effect
of vector symbol size on the performance of VSD.

10
• Present a way to reduce the decoding failures for smaller symbol size.
1.3 Publications
The work from this thesis appears in the following publications:
1. U. Tuntoolavest and J.J. Metzner, “Vector symbol decoding with list inner
symbol decisions: performance analysis for a convolutional code,” 1st IEEE
Electro/Information Technology Conference Proceeding, June 8-11,2000, Chicago, IL,
paper session 105, paper reference EIT 574, file name: tuntoolavestmetzner.pdf in the
Conference Proceedings CD.
2. U. Tuntoolavest and J.J. Metzner, “Vector symbol decoding with list inner
symbol decisions and outer convolutional codes for wireless communications,” 2nd IEEE
Electro/Information Technology Conference Proceeding, June 6-9,2001, Oakland
University, paper session TE 301, paper reference EIT 164, file name: TE301_3F.doc in
the Conference Proceedings CD. – Awarded Second Place
3. U. Tuntoolavest and J.J. Metzner, “Vector symbol convolutional decoding with
list symbol decisions,” accepted for publication in Integrated Computer-Aided
Engineering Journal.
4. U. Tuntoolavest and J.J. Metzner, “Performance of vector symbol decoding
with various vector symbol sources and interleaved Reed-Solomon codes,” (plan to
submit to IEEE Transactions on Communications).

Chapter 2
BACKGROUND
2.1 Block Codes and Convolutional Codes
Given information as a binary sequence, we can encode this information to make
the information more reliable at the receiver by using a linear block code. An (n, k)
binary block code is a block of length n bits that consists of k information bits and n-k
check bits. The check bits are derived from the information bits by some certain rules.
The n-bits block is called a code word. Since there are k information bits in a block, there
are 2k possible code words. Each code word corresponds one-to-one to each pattern of k
information bits. A binary block code is also a linear block code if and only if the
modulo-2 sum of any two code words is also a code word [27]. An (n, k) block code with
nonbinary symbols is a block of length n symbols that consists of k nonbinary
information symbols and n-k nonbinary check symbols.
Convolutional codes were first proposed by Elias [28] in 1955. Several other
researchers such as Wozencraft [29] Massey [30] and Viterbi [31,32,33] proposed ways
to decode them. Viterbi’s maximum likelihood decoding is probably the most popular
scheme for small memory convolutional codes. Owing to its simpler implementation,
ease of using soft decision (likelihood) information and equal or better performance,
convolutional codes have become more attractive than block codes.

12
An (n, k, m) binary convolutional code is different from an (n, k) binary block
code in that the encoder of the former has memory of size m while the encoder of the
latter does not. An (n, k, m) convolutional encoder consists of k inputs, n outputs and an
m-stage shift register that contains the m*k previous information bits. With the memory,
the n bits are derived not only from the k new information bits, but also from the m*k
previous information bits. Note that,, an (n, k, m) convolutional code may also be called
rate k/n convolutional code with memory of size m. Similar to a block outer code with
nonbinary symbols, an (n, k, m) convolutional code with nonbinary symbols can be
constructed as the codes where the symbols of the outer code are nonbinary instead of
binary.
2.2 Concatenated Codes
Forney first proposed the idea of concatenated codes in 1966 [10]. Concatenation
is a practical method of constructing long codes from shorter codes. Long codes usually
require special or complex equipment, but concatenated codes can be decoded with the
same equipment as the shorter codes. A simple concatenated code normally consists of an
inner code and an outer code. The inner code is usually a code that maps the given r-bit
data vector into 2r possible waveforms. The outer encoder may be any block or
convolutional code with nonbinary symbols. The decoding of a concatenated code is
done in two steps. In the first step, the inner code decoder decodes each received inner-
code waveform by matching it to the list of 2r possible transmitted waveforms, each

13
representing a different binary r-tuple. This matching can be done in many ways such as
by using coded modulation or soft decision decoding. Each post-decoded inner-code
sequence, which is an r-bit vector symbol, is equivalent to one nonbinary symbol to the
outer decoder. An inner decoder may be able to provide more information to the outer
decoder by outputting a list of more than one possible r-bit vector symbols. If the outer
decoder can use this extra information, the overall performance will naturally be
improved. In the second step of the decoding, the outer decoder decodes the whole
received sequence that consists of many nonbinary symbols where each symbol results
from an inner decoder.
2.3 BCH Codes and Reed-Solomon Codes
BCH codes are named after Bose, Chaudhuri, and Hocquenghem. According to
[34], the first paper on binary BCH codes, “Codes correcteur d’erreurs”, was published in
1959 as “a generalization of Hamming’s work” by Hocquenghem. Independently in
1960, Bose and Chaudhuri proposed the same concept [35,36]. Nonbinary BCH codes
were generalized from binary BCH codes by Gorenstein and Zierler in 1961 [37].
BCH codes are widely known as a powerful class of multiple error-correcting
cyclic codes. Peterson proved their cyclic structure and presented the first decoding
algorithm known as “Peterson’s Direct Solution” method in 1960 [38]. After that,
several other decoding algorithms have been proposed, but the one by Berlekamp is the
first efficient one for both binary and nonbinary BCH codes [13,39,40]

14
BCH codes are cyclic codes that have a certain constraint on their generator
polynomials; this constraint ensures their minimum distances (dmin). Therefore dmin of
these codes are readily known. A computer is not needed to generate all possible nonzero
code words and search for the minimum-weight code word as must be done for other
codes in general.
Reed-Solomon codes were devised by Reed and Solomon in 1960 [11] and were
discovered to be a subclass of BCH codes by Gorenstein and Zierler [37]. Reed-Solomon
codes form the most important subclass of nonbinary BCH codes because they have a
unique property of maximum minimum-distance (dmin), which is not found in any other
BCH codes. This property is probably the reason why Reed-Solomon codes are widely
used, despite the fact that their decoding algorithms are very complicated. Reed-Solomon
codes are the most popular outer codes for concatenated codes.
A Reed-Solomon code is a nonbinary BCH code, which has symbols from GF(qm)
where q is a prime. An (n,k) t-error-correcting Reed-Solomon code has block length (n)
of qm-1 and 2t parity-check symbols [27]. Its minimum distance (dmin) is exactly 2t+1
which is the maximum possible dmin that an (n,k) code with 2t parity-check symbols can
have according to the Singleton bound stated in [34].
Similar to the binary BCH codes, the generator polynomial g(x) of a primitive t-
error-correcting Reed-Solomon code is chosen to have certain roots from GF(qm). To
obtain these roots, however, g(x) of a Reed-Solomon code can be expressed directly
without using the minimal polynomials as shown:
g(x) = (x + α)(x + α 2) … (x + α 2t) (2.1)
15
where α is a primitive element of GF(qm). Thus g(x) and every code word have α, α 2,
α3,…, α 2t as their roots. From this property, the decoding algorithms for binary BCH
codes can be applied to Reed-Solomon codes with the additional step of calculating the
values of errors since the symbols of Reed-Solomon codes are no longer binary [27]. A
lot of researches have been done to discover and improve Reed-Solomon code decoding
algorithm as well as its implementation since this code has been proposed in 1960. The
early ones are the Berlekamp-Massey algorithm [12] and the Berlekamp-Rumsey-
Solomon algorithm [39]. More details on Reed-Solomon codes, their decoding algorithms
and their applications can be found in [13,34,41].
Reed-Solomon codes can be shortened or punctured to have a desired length. By
shorthening, some data symbols of a Reed-Solomon code are deleted. By puncturing,
some check symbols of a Reed-Solomon code are deleted. The shortened or punctured
Reed-Solomon codes are still maximum distance codes. Therefore, Reed-Solomon codes
can be used with ARQ (Automatic Repeat Request) in incremental redundancy scheme
[42,43]. In this scheme, the code is punctured and the main part is transmitted first. The
punctured parts, which may be divided into many blocks, will be transmitted when there
is a request for more redundancy from the receiver.
Massey suggested the use of concatenated codes with inner convolutional codes
and outer Reed-Solomon codes in 1984 [44]. He proposed that convolutional codes
should be used as the inner codes since they can employ soft decision decoding easily.
Then Reed-Solomon codes should be used for outer codes to correct errors left by the
Viterbi algorithm, which are often short burst errors.

16
2.4 List Decoding
The list decoding idea mostly involves searching for the correct code word on a
single list by using overall error detection [9,19,45,46]. The decoding usually consists of
two main steps. The first step provides a list of possible decoded sequences (or code
words). This list should consist of enough alternative choices such that the correct code
word is almost always in the list. However, the more choices it contains, the longer it
takes to decode. In the second step, the decoder tests each sequence using error detection.
The sequence that agrees with the error detection (i.e., has zero syndromes) is considered
to be the decoded sequence. Notice that there is a single list for a whole received
sequence. Since error detection with a sufficient number of check bits can almost always
detect the errors, the decoding failure probability is almost negligible when the correct
sequence is a member of the list.
The list idea in this thesis is different from what was described. Instead of having
a single list for the whole received sequence, each vector symbol has its own list of
alternative choices. Consequently, there are too many combinations to search for if we
were to depend on overall error detection. These lists of alternative symbol choices will
be used with error correction in VSD algorithm. The decoding algorithm of VSD with
lists of alternative symbol choices is described in Chapter 3.

17
2.5 Maximum-Likelihood Decoding and Viterbi Algorithm
For convolutional codes, the transmitted symbols have memory. Therefore, the
decoder should make the decision based on the sequence of received symbols instead of
the decision based on the current received symbol only. In digital communications, the
optimum receiver is the one that minimizes the probability of decoding error. Maximum-
likelihood decoder is optimum when the code words are equally likely. To understand the
concept of maximum-likelihood decoding, we will follow the steps by Lin & Costello
[27]. Suppose an information sequence u was encoded into a convolutional codeword v
and transmitted. At the receiving end, the decoder provides an estimate ( v̂ ) of the
transmitted codeword based on the received sequence r. The decoding error probability is
P(E) = ∑ ≠r
rv/rv ))P(P ˆ( (2.2)
Since P(r) does not depend on the decoding algorithm, minimizing P(E) is the
same as minimizing )P v/rv ≠ˆ( or maximizing )P v/rv =ˆ( for any given r.
P(v/r) = [P(r/v)P(v)]/P(r) (2.3)
For equally likely code words (due to equally likely information sequences), P(v)
is constant. Therefore, maximizing P(v/r) is the same as maximizing P(r/v). A
maximum-likelihood decoder makes a decision based on maximizing P(r/v). In other
words, it chooses the code word that has the greatest likelihood of being the received
sequence. Note that,, it may not be optimum if the code words are not equally likely. In
many practical cases, however, P(v) is unknown to the receiver and thus, maximum-
likelihood decoding is the best the receiver can do. Choosing the most likely code word

18
may be done by comparing the 2k possible code words with the received sequence, where
k is the number of data bits encoded in the transmitted sequence. However, this
calculation is impractical when k is large [47,48].
The Viterbi Algorithm [31,32,33] is a practical way to implement maximum-
likelihood decoding. This is because it greatly simplifies the number of calculations for
maximum-likelihood decoding. From a trellis diagram of a convolutional code, define the
path metric at each node and each time interval as the sum of the branch metrics up to
that node and that time interval. A branch metric is the sum of the bit metrics on that
branch. The bit metric is calculated from the received signal. The examples of bit metrics
for AWGN channel and for Rayleigh fading AWGN channel are shown in Section 4.1.3.
At each node and each time interval when there is a merger of two or more incoming
paths, the Viterbi decoder only keeps the incoming path that has the highest path metric
and discards the rest. Note that,, our metrics are correlation metrics, and therefore the
path with the highest metric is the most likely path. However, if our metrics are
Euclidean distance metrics, the path with the lowest metric will be the most likely path
and the Viterbi decoder keeps the lowest metric path and discard the rest. Those paths can
be discarded because any particular path that originated from a certain node will
accumulate the same additional metric. Since the path kept is the most likely path up to
this node, it will always be more likely than the discarded paths. Therefore, the decoder
does not have to make further calculations for these discarded paths and the number of
calculations is reduced considerably.

19
Even if it is more practical than brute-forced maximum-likelihood decoding, the
complexity of Viterbi decoding for an (n, k, m) convolutional code still increases
exponentially with the constraint length (memory size) m [47]. Thus, we usually use a
relatively small k and m convolutional codes such as a (2,1,2), a (2,1,4) or a (3,2,2) code
considered in this thesis.
2.6 List Viterbi Algorithm (LVA)
For inner convolutional codes, one way to provide alternative choices for each
vector symbol is to use a List Viterbi Algorithm (LVA). Seshadri and Sundburg first
presented this idea with a list of two in 1989 [18]. The idea was generalized for list of
more than two in 1994 [19]. The application is for concatenated codes where the inner
code is a terminated convolutional code and the outer code is a block code with error
detection only. Chen and Sundburg extended the idea for continuous transmission in
2001 and the new algorithm was called “CLVA (Continuous List Viterbi Algorithm)”
[20], where the inner convolutional code was not terminated for each outer symbol. The
CLVA is useful for list decoding with error detection because each member of the list is a
possible decoded sequence for the overall block of concatenated codes. It is necessary to
have a sufficiently long list for LVA and CLVA because only error detection is
employed. The longer the list is, the more complex the decoder will be. In this thesis,
LVA is used for decoding a convolutional inner code, where the code is terminated for
each vector symbol. Instead of having only one list for an overall concatenated code,

20
there is a list for each vector symbol. This list is a short list that usually contains no more
than a few members and it may contain only one member. The outer code in
consideration is a convolutional code with Vector Symbol Decoding (VSD) technique
instead of a block code. VSD uses these lists of alternative choices to improve the
correction capability and to simplify the decoder.
There are two algorithms for LVA [19]. One is called “Parallel LVA”, which
simultaneously produces a rank ordered list of L most likely sequences. Another is called
“Serial LVA”, which iteratively produces the kth most likely sequence based on the first
k-1 most likely sequences. Parallel LVA is more straightforward than Serial LVA, but it
requires more storage and computations. Since we will use only L = 2 and a short length
convolutional code as our inner code, storage is not a problem in our case. For simplicity,
parallel LVA with L = 2 [18] is employed in our simulations. For L > 2 and longer length
convolutional code, serial LVA can be used. Basically, parallel LVA with list of two
means that the decoder keeps not only the path with the highest metric, but also the path
with the second highest metric. At termination, there are two survivors. The survivor with
the highest path metric is the first choice on the list and the survivor with the second
highest path metric is the second choice. To better understand Parallel LVA, a simplified
example is given.
Suppose a (2,1,2) convolutional code with the encoder circuit in Figure 2.1 is
used. The generator polynomial is G(D) = [(1+D2) (1+D+D2)].

21
Figure 2.1 The encoder circuit of a (2,1,2) convolutional code with G(D) = [(1+D2)
(1+D+D2)].
For simplicity, the channel is a discrete memoryless channel (DMC). Since we
would also like some type of soft decision decoding, assume that the channel is also
binary-input, quaternary-output. Use the definitions of hard-decision and soft-decision
decoding defined by Lin & Costello [27] as follows: for a binary coding system, soft-
decision decoding means that there are either more than two quantization levels or that
the received signal is unquantized at the demodulators, while hard-decision decoding
means that there are only two quantization levels. Strictly speaking, true soft-decision
decoding must operate on unquantized received signals. The soft decision for inner
decoder will be done in the simulation parts of this thesis. It should be emphasized that
although VSD, the outer decoder, uses lists of alternative choices as a type of soft
decision, this is not a true soft decision for the outer code. Therefore, the inner decoder
may use true soft decision, but the VSD does not use it. As a comparison, Reed-Solomon
code decoding, which is another type of concatenated outer code decoding, does not use
any soft decision decoding at all. Detail on the concept of VSD with lists is described in
Chapter 3.
+ +
+

22
To understand how LVA works, a simple example is shown. The channel is a
binary-input, quaternary-output channel with its metric table from [27]. The inner code is
the (2,1,2) convolutional code.
ri
vi
01
02
12
11
0 10 8 5 0
1 0 5 8 10
Figure 2.2 a) Binary-input, quaternary-output channel and b) its bit metric table, adapted
from Figure 11.3 in [27].
Suppose an information sequence of length 4 bits is encoded and transmitted. In
addition, suppose the received sequence is (0102 1102 0212 0201 0101 0102) and parallel
LVA with L = 2 is employed to obtain the two most likely sequences. This algorithm is
shown on the trellis diagram in Figure 2.3. The numbers 00,01,10 or 11 on each branch
are the corresponding outputs. The number in the parenthesis on each branch is the
0.4
0.4
0.20.3
0.3 0.2
0.1
0.1
1
0
01
02
11
12

23
branch metric. The numbers in the box next to each node are the accumulated path
metrics. The dashed line represents the most likely decoded sequence. The data part of
this is “the first choice” for the corresponding vector symbol. The dotted line represents
the second most likely decoded sequence. The data part of this is “the second choice” for
the same vector symbol.

24
Received seqeunce: 0102 1102 0212 0201 0101 0102
Figure 2.3 Example of parallel LVA with L = 2
S000
00 0000 00 00 00
11 11 11 11
11 11 11 11
01 01 01 01
01 01
10 10 10
10 10 10
00 00
(18)
(5) (5)
(8)
(5)
(18)
(13)
(13)
(13)
(13)
(16)
(16)
(10)
(10)
(18)
(5)
(5)
(18)
(8)
(8)
(15)
(15)
(20)
(0)
(10)
(10)
(18)
(5)
18 26 39,23
39,3310
523
23
39,23
39,33
57,44
54,48
57,51
47,41
77,64
67,64
95,82
t = 0 t = 1 t = 2 t = 3 t = 4 t = 5 t = 6
S101
S210
S311

25
Detailed steps for this example:
t = 1: The decoder calculates each existing branch metric based on the received bits in the
first interval and the metric table. Note that,, not all states are connected because the
encoder always departs from state S0. The received bits for this interval are 0102. For the
branch with corresponding outputs 00, the branch metric is 10 + 8 = 18. Similarly,
another branch metric is 0 + 5 = 5. Then the path metric at each state for the first interval
is simply the branch metric. The decoder also keeps record of the previous states.
t = 2: The branch metrics are calculated. The path metric at each state for the second
interval is the sum of the previous path metric and the current branch metric. The decoder
also keeps record of the previous states.
t = 3: The branch metrics are calculated. For the third interval, there are two incoming
paths at each state. For the normal Viterbi algorithm, the decoder will keep the most
likely path (highest correlation metric or lowest Euclidean distance metric) and discard
other(s). Since LVA with L=2 is used, the decoder will keep two most likely paths.
Therefore, no path is discarded at this point. The decoder always keeps record of the
previous states for the paths it keeps.
t = 4: The branch metrics are calculated. For the fourth interval, there are still two
incoming paths at each state, but there are four possible path metrics. For example, at
state S0, the four values are 57,41 (from previous state S0) and 44,38 (from previous state

26
from and discards the other two. If two discarded values correspond to the same branch,
that branch is shown to be eliminated by an X on the trellis.
t = 5, 6: Same steps as when t = 4. Note that,, not all states are connected because the
encoder is returning to state S0 at the end of the transmitted sequence. The trellis diagram
is terminated at t = 6 since the information sequence contains 4 bits and we use a rate 1/2
convolutional code with memory of 2.
Path backtracking:
The decoder traces back to find the two most likely sequence starting from the terminated
point at t = 6.
t = 6: The decoder finds that the two most likely sequences have the same previous state,
so they overlap in this time interval.
t = 5: Same as t = 6. They still overlap.
t = 4: At this interval, the two sequences separate. The most likely sequence has previous
state S0 and the second most likely one has the previous state S1.
t = 3: The decoder keeps track of the previous state only of the higher path metric one (39
and 39) for both sequences and discards the previous state of the lower path metric (23

27
and 33). That is the previous state of the most likely sequence is S0 and that of the second
most likely one is S2.
t = 2: Similar to t = 3. Notice that the two sequences have the same previous state S0 and
so they will merge.
t = 1: Both sequences overlap.
Therefore, the most likely decoded sequence is (00 00 00 00 00 00) and the second most
likely one is (00 11 01 11 00 00). The corresponding decoded information sequences are
(0 0 0 0) and (0 1 0 0) respectively.
It should be noted that the second most likely sequence always separates from the
most likely sequence at some time instant and always merges back at a later time instant
and they will stay overlap for the rest of the sequence [19]. This may serve as an easy
way to check if the result is reasonable.
For our application, the two decoded information sequences represent the first and the
second choice of an outer code symbol at the input of Vector Symbol Decoder (VSD),
which is the outer code decoder.

Chapter 3
CONCEPT OF VECTOR SYMBOL DECODING (VSD)
� Vector symbol decoding (VSD) was first presented by Metzner [14] in 1990 as a
decoding technique for block outer codes of concatenated codes. It was also rediscovered
by Haslach and Vinck [15] in 1999. It works with many randomly chosen linear block
codes that use nonbinary symbols. The structure of these outer codes can be the same as
binary codes’ structure while using nonbinary symbols. Note that,, each nonbinary
symbol of the outer code is a post-decoded inner code sequence. VSD can correct a large
number of nonbinary error symbols, usually beyond the guaranteed correcting capability
specified by the minimum Hamming distance of the codes. Metzner also proposed the
idea of using list decoding for block outer codes [16] in 2000.
The idea of VSD for convolutional codes was proposed by Seo [17] mainly for
systematic convolutional codes with the assumption that the code is not terminated. In
this thesis, the idea of VSD with lists of alternative symbol choices for convolutional
codes is presented. The use of list decoding improves the performance and simplifies the
decoding. In addition, the focus is on nonsystematic convolutional codes since good
convolutional codes are usually nonsystematic. To implement VSD for nonsystematic
convolutional codes, it is necessary to find their parity check matrix. One method to find
the parity check matrix for (n-1)/n nonsystematic convolutional codes is presented in
Section 3.5.

29
3.1 Vector Symbol Decoding for Block Codes
Consider an (n,k) linear block code with nonbinary symbols where each
nonbinary symbol is an r-bit sequence, which is the same as an r-tuple over GF(2) or an r-
bit vector. Although VSD deals with nonbinary (viewed as vector) symbols, the basic
structure is based on a binary code and the parity check matrix H is the same as the
binary matrix of the binary (n, k) block code. The vector symbol decoding technique can
be extended readily to the case where any entry in the H matrix is from any GF(q) and
each position in the r-component vector may come from any GF(q) instead of GF(2).
However, the discussion will be limited to the q = 2 case, which is the simplest, and yet
highly effective.
All (n, k) vector symbol code words V must satisfy the equation:
0 = H*V
or
=
n
3
2
1
k-n
2
1
v
vvv
*
h
hh
MM
L
MOM
MOM
L
00
00
(3.1)
where 0 = A matrix whose components are all 0’s. Here it is the same size as the
syndrome matrix S which is (n-k) x r.
H = (Binary) parity check matrix of size (n-k) x n.
V = An (n, k) vector symbol code word. It is a matrix of size n x r where each row
vi is an r-bit vector, denoted as a vector symbol.

30
Notation: A bold lower case letter indicates a vector while a bold upper case indicates a
matrix.
When a code word V is transmitted though a channel, it is subject to noise, which
may cause some vector symbols to be erroneous. Let the ith vector error symbol be ei and
the ith post–decoded inner code sequence be yi. Then,
yi = vi + ei (3.2)
The received symbol matrix Y can be represented in terms of the code word V and the
error symbol matrix E as
Y = V + E
or
+
=
n
3
2
1
n
3
2
1
n
3
2
1
e
eee
v
vvv
y
yyy
MMM
(3.3)
At the receiver, the decoder will compute the syndrome matrix
S = H*Y = H*E
or
=
=
n
3
2
1
k-n
2
1
n
3
2
1
k-n
2
1
k-n
2
1
e
eee
*
h
hh
y
yyy
*
h
hh
s
ss
MM
MMM
(3.4)
Where S = Syndrome matrix of size (n-k) x r.
Y = Received symbol matrix of size n x r.

31
E = error symbol matrix of size n x r.
si = ith row syndrome vector.
To explain the concept of VSD principle, some notations from [49] with slight
modification are used.
Notations:
Null combination - a member of the row space of H that is also in the null space of E.
Null indicator - an n-bit vector where the value is “1” at the index of the members in the
corresponding null combination and “0” elsewhere.
Error-locating vector – an n bit vector resulted from the logical OR operation of all n-k-t
linearly independent null combinations.
Ht = an n-k x t submatrix of H consisting of t columns where the errors are located.
These notations should be clear with the following example.
To understand the concept of VSD technique, consider that a syndrome vector (si)
is computed from multiplying each parity equation (a row in H matrix) to the error matrix
E. For example,
si = hi* E
sj = hj* E (3.5)
If si + sj = 0 (a zero vector), then
0 = (hi + hj)* E (3.6)
Since hi and hj are n-bit vectors, their sum is also an n-bit vector.

32
Suppose (hi + hj) = (1 0 1 0 0 0 1 0)
With the assumption that error symbols are linearly independent, the error symbols must
be a zero vector (= no error) at the positions where (hi + hj) = 1. Otherwise, Equation
(3.6) is not satisfied. This means that we have identified some of the received symbols
that are correct. From Equation (3.6), hi + hj is a null combination. For this null
combination, the null indicator is (0….0 1 0…0 1 0 ..0), where the first “1” is at the ith
position and the second “1” is at the jth position in the null indicator.
Suppose there are t linearly independent error symbols where t is fewer than the
number of bits per symbol r. This means that E has a rank of t. Since S = H*E, S usually
has a rank of t unless Ht has a rank less than t. If S has rank t, the syndrome matrix S
consists of n-k syndrome vectors with t linearly independent syndrome vectors.
Consequently, each of the remaining n-k-t syndrome vectors is in the row space of t
linearly independent syndrome vectors. This means that there is always a sum of each of
the remaining n-k-t syndrome vectors with the appropriate syndrome vectors from the t
linearly independent syndrome vectors that results in a zero vector. Since the rank of the
column space of S is t, there are n-k-t null indicators, which reveal n-k-t linearly
independent null combinations. For this example, one of the linearly independent null
combinations is hi + hj. In addition, suppose that (s1 + s3 + s4) = 0. Then another null
combination is h1 + h3 + h4.
Received symbol matrix containsno error in these positions.

33
For this example, if we perform an “OR” operation between the n-bit vector
resulted from (hi + hj) and the n-bit vector resulted from (h1 + h3 + h4), we will obtain a
new n-bit vector called “error-locating vector”. Note that,, if there are more than two
linearly independent null combinations, we need to perform an “OR” operation for all the
null combinations to obtain the error-locating vector. Suppose there are t error symbols in
this received symbol matrix. If all t error symbols are linearly independent (t ≤ r), then all
error symbol positions will be revealed by the “0” positions in the error-locating vector.
That is the error-locating vector will contain at least t “0’s”. To have exactly t “0’s” and
n-t “1’s” in the error-locating vector, certain condition must be met [14] The necessary
condition will be described in Section 3.3. Note that,, Gauss-Jordan reduction is done on
the syndrome matrix S to recognize the sets of syndrome vectors that add up to zeros.
The next step is to find the exact patterns of the error symbols. Recall that S =
H*E, so we should be able to calculate the error patterns from the knowledge of S and H.
This can be demonstrated as follows: Create a t x t submatrix from the parity-check
matrix H. This submatrix of H (or Hsub) consists of t rows (which correspond to t linearly
independent rows of S) and t columns (which correspond to the t error positions) from the
original H. Then, we can get the patterns of the error symbols by multipling Hsub -1
with
the submatrix of S (or Ssub) that consists of the t linearly independent rows of S. That is
Esub = Hsub -1* Ssub (3.7)
where Esub is the error symbol matrix that contains only the nonzero error symbols.
Since we now know the patterns of the nonzero error symbols and their positions,
the decoder can correct the received symbol matrix Y accordingly.

34
3.2 Vector Symbol Decoding for (n-1)/n Convolutional Codes
Using an (n,k,m) convolutional code (with k = n-1) as an outer code of a
concatenated code means that each input unit is a nonbinary symbol instead of a single
bit. Therefore, each shift register unit contains a nonbinary symbol and each output unit is
also a nonbinary symbol. Similar to block VSD, the basic structure for convolutional
VSD is based on a binary code and the parity check matrix H is the same as the binary
matrix of the binary (n,k,m) convolutional code. In addition, convolutional VSD can be
extended readily to GF(q), but the discussion will also be limited to the q = 2 case for
simplicity.
While the parity check matrix of a block code is a finite matrix, the parity check
matrix of a convolutional code is a semi-infinite matrix unless the code is terminated. For
convolutional codes, we need to consider only a submatrix, which is a part of the semi-
infinite parity check matrix, to decode a received sequence. The size of the submatrix
depends on the number of syndromes the decoder is using in the attempt to decode the
received sequence. If the decoder does not succeed with the current number of
syndromes, it can increase the number of syndromes and try again. Higher number of
syndromes also means that more received symbols are considered in the decoding process
at a given time. Therefore, when the decoder succeeds in correcting the errors, it would
correct the errors for the whole set of received symbols in consideration at that time.
However, a lower number of syndromes should be tried first because the complexity
increases more than linearly with the number of syndromes. Note that,, a block code has a

35
fixed number of syndromes and its decoder always decodes with that number of
syndromes.
Suppose that the decoder for convolutional VSD currently uses x syndromes. Any
vector symbol code word V must satisfy the Equation:
0 = H*V
or
=
nx
3
2
1
x
2
1
v
vvv
*
h
hh
MM
L
MOM
MOM
L
00
00
(3.8)
where 0 = A matrix all of whose components are 0’s. The size will be obvious from the
context.
H = A submatrix of a semi-infinite parity check matrix of size x by nx.
V = A vector symbol code word. It is a matrix of size nx by r where each row is
an r-bit vector.
Unlike in block codes, the codeword V is not the entire sequence of the encoded
convolutional code since this sequence can go on forever. The codeword V is only a part
of the encoded sequence. This concept should be clear when the received symbol matrix
Y is explained.
When a code word V is transmitted though a channel, it is subject to noise, which
may cause some vector symbols to be erroneous. Let the ith (nonbinary) error symbol be
ei and the ith post–decoded inner code sequence be yi. Then,
yi = vi + ei (3.9)

36
The received symbol matrix Y can be represented in terms of the code word V and the
error symbol matrix E as
Y = V + E
or
+
=
nx
3
2
1
nx
3
2
1
nx
3
2
1
e
eee
v
vvv
y
yyy
MMM
(3.10)
The received symbol matrix Y is not the entire received symbol sequence. Y is a
block of received symbols sequence that starts with the first yet undecoded received
symbol. This block is also known as First Information Block (FIB). Its length depends on
the number of syndromes the decoder is using as shown in Figure 3.1.
Figure 3.1 First information blocks for the case that the decoder uses one syndrome and
the case that it uses two syndromes
For a (n,n-1,m) convolutional code, Y for the one syndrome case consists of n
received symbols and Y for the two syndrome case consists of 2n received symbols and
so on.
At the receiver, the decoder will compute the syndrome matrix
S = H*Y = H*E
Received Symbol sequence
Decodedssymbols FIB (1 syndrome)
FIB (2 syndromes)

37
or
=
=
nx
3
2
1
x
2
1
nx
3
2
1
x
2
1
x
2
1
e
eee
*
h
hh
y
yyy
*
h
hh
s
ss
MM
MMM
(3.11)
Where S = Syndrome matrix of size x by r since the decoder currently use x syndromes
Y = Received symbol matrix of size nx by r.
E = Error symbol matrix of size nx by r.
si = ith row syndrome vector.
The idea of error-locating vector and error value computation is the same as in
block VSD case. Often, the solutions can be obtained by forward substitution rather than
full matrix inversion. This simplifying feature of convolutional codes for VSD had been
noted by Seo [17].
3.3 VSD with Lists of Alternative Symbol Choices
When the inner code decoder can provide a list of likely candidates for each
vector symbol, VSD is modified so that it can use this extra information to improve and
often simplify the decoding. Specifically, the decoder will append the differences
between those choices and the first choice as additional rows at the end of the syndrome
matrix S. When one of the alternative choices is correct, the recorded difference is the
true error value, which is almost always be recognized as a member of the row space of S
after some column operations. In addition, the position of the true error is known by

38
construction; thus this error can be corrected immediately and the number of remaining
errors is reduced. This improves the performance and often simplifies the correction.
Metzner showed in [16] that VSD without any alternative choices can correct
errors if the errors are at least two positions away from covering any code words while
the one with alternative choices can correct errors if the errors are at least one position
away with the requirement of one correct alternative choice. To better understand this
coverage condition, suppose an outer-code codeword is “111011”, which has weight of
five. If at most three error symbols occur in the “1” positions of this outer-code code
word, this means that the errors are at least two positions away from covering this outer-
code code word. If at most four error symbols occur in the “1’s” positions of this outer
code word and one of the covering error positions has a correct alternative choice, this
means that the errors are at least one position away and there is also one correct
alternative choice. The condition for the case of VSD with alternative choices is used in
developing the recursive equations in Chapter 6.
For the case of linearly independent errors where the errors are at least two
positions away from covering any code words, the rank of S is always equal to the
number of 0’s in the error-locating vector. In addition, [49] shows that even cases of
completely covering a single code word can be decoded if two of the erroneous first
choices in the covering set have correct second choices. A simple example was also
shown in [50]. Further research is necessary to extend this idea to a more general case. In
this thesis, the assumption is that VSD will fail whenever the coverage condition is
violated, unless noted otherwise.

39
A technique was also discovered to correct most cases of t dependent errors of
rank t-1 [49]. Also the presence of linear dependence can almost always be detected by
observing that the rank of S is greater than the number of errors in the error-locating
vector [14,51]. Actually, if the errors are at least two positions away from covering a
codeword, the presence of linear dependence can always be detected this way. In this
thesis, the assumption is that errors are linearly independent, unless noted otherwise. That
is the feature of being able to correct t errors of rank t-1 is not made use of in the thesis.
However, the discovery of correct alternative choices often eliminates dependent errors.
To better understand the decoding concept of convolutional VSD with alternative
choices, an example is given [50].
3.4 A Decoding Example for a (2,1,2) Convolutional Code (with 2 Alternative
Choices):
The generator matrix of the (2,1,2) code used is from Table 11.1c in [27]. Using
the same notation as [27], this code is defined by G(D) = [1+D2,1+D+D2]. Recall that
although VSD deals with nonbinary (viewed as vector) received symbols, the basic
structure is based on a binary convolutional code (i.e., the parity check matrix H is a
binary matrix, the states and the outputs of the trellis diagram are binary.)
Notations:
A bold lower case letter indicates a vector while a bold upper case indicates a matrix.
0 means the first choice symbol is correct.

40
ei’ is the value of the first choice symbol error when the second choice is correct.
ei is the value of the first choice symbol error when the second choice is also incorrect.
Assume that the decoder uses 3 syndromes and the error matrix E is
E =
000eee
3
'2
1
(3.12)
The (binary) parity check matrix H for 3 syndromes is
H =
111011001110000011
(3.13)
and the syndrome matrix S is
S = H*Y = H*E (3.14)
The (nonbinary) received symbols matrix Y is
Y =
6
5
4
3
2
1
yyyyyy
(3.15)
where yi are (nonbinary) received symbols.
From equation (3.12-3.14), the syndrome matrix is

41
S = H*E =
++++
3'21
31
'21
eeeeeee
(3.16)
Since we have two alternative choices, the decoder will append to S up to six
rows creating a modified syndrome matrix S’. These additional rows are the differences
between first and second choices for the symbols involved.
Thus,
S’ =
++++
xxxxex
eeeeeee
'2
3'21
31
'21
(3.17)
where x indicates the differences that do not match first choice errors.
Next, S’ is reduced by Gauss-Jordan column operations. This will reveal that e2’
is in the row space of S (the other five would rarely be in the row space of S). We also
know that it corresponds to symbol 2 by construction. Therefore, this e2’ is added to all
syndrome elements that involve e2’. The new syndrome matrix S” is
S” =
++
31
31
1
eeee
e (3.18)
Then the null combination (combination that results in a zero vector) is found to be the
combination of the second and the third elements, so we add the second and the third

42
rows of the H matrix, which results in 01 01 11. The zeros reveal the positions of the
error (symbol 1 and symbol 3). Finally, the values of e1 and e3 are solved for, using
equations from rows 1,2 and columns 1,3 of H:
⋅
=
3
1
2
1
ee
"s"s
1101
(3.19)
The solutions in this example can be obtained by forward substitution rather than
full matrix inversion.
3.5 Parity Check Matrix for (n-1)/n Nonsystematic Convolutional Codes
To implement VSD, the knowledge of the parity check matrix is required. There
are well known systematic methods to find the H matrix for systematic linear block codes
and systematic convolutional codes [27]. However, it is also desirable to find these
matrices for the nonsystematic convolutional codes because good convolutional codes are
usually nonsystematic.
One way to compute the H matrix of rate 1/2, 2/3 and 3/4 is shown in this thesis.
The notations are the same as in [27]. The principle of this method should work for any
(n-1)/n convolutional codes, although it is much more time consuming to compute the
final formula for higher n.
From [52], we have
G(D)HT(D) = 0 (3.20)

43
Where G(D) is the transfer function matrix
H(D) is the parity transfer function matrix
For an (n,k,m) convolutional code, Equation (3.20) can be expressed as follows:
⋅
(D)h
(D)h(D)h
(D)g(D)g(D)g
(D)g(D)g(D)g
(n)
(2)
(1)
(n)k
(2)k
(1)k
(n)1
(2)1
(1)1
ML
MMMM
L
= 0 (3.21)
Rate 1/2 convolutional codes:
For rate 1/2 convolutional codes, Equation (3.21) is simply
[g(1)(D) g(2)(D)]
(D)h(D)h
(2)
(1)
= 0 (3.22)
To simplify the notation, Equation (3.22) is rewritten as:
[A B]
(2)
(1)
hh
= 0 (3.23)
or Ah(1) + Bh(2) = 0
Therefore, Ah(1) = Bh(2)
Notice that there are two unknowns and one equation, so there is more than one answer.
We choose h(1) = B and h(2) = A to satisfy the equation.
Therefore, the formula for rate 1/2 convolutional code is
h(1)(D) = g(2)(D) and h(2)(D) = g(1)(D) (3.24)
Equation (3.24) can be rewritten in the form:

44
h(i)(D) = mim
ii DhDhh )()(1
)(0 ...+++ (3.25)
where i = 1,2 and m is the memory size of the convolutional code.
The next step is to relate H(D)or h(i)(D) with the semi-infinite H matrix.
H =
O
MM
OMM
MM
)2()1(
)2()1(
)2(1
)1(1
)2()1(
)2(0
)1(0
)2(1
)1(1
)2(0
)1(0
)2(1
)1(1
)2(0
)1(0
mm
mm
mm
hhhh
hhhhhhhh
hhhhhh
(3.26)
Rate 2/3 convolutional codes:
For rate 2/3 convolutional code, Equation (3.21) is
⋅
(D)h(D)h(D)h
(D)g(D)g(D)g(D)g(D)g(D)g
(3)
(2)
(1)
(3)2
(2)2
(1)2
(3)1
(2)1
(1)1 = 0 (3.27)
To simplify the notation, Equation (3.27) is rewritten as follows:
⋅
(3)
(2)
(1)
hhh
FEDCBA
= 0 (3.28)
Note: D in Equation (3.28)-(3.33) is only a simplified notation.
or Ah(1) + Bh(2) + Ch(3)= 0 (3.29)
Dh(1) + Eh(2) + Fh(3)= 0 (3.30)
Solving the above two equations, we obtain
(AE + BD) h(1) = (CE + BF) h(3) (3.31)

45
(AE + BD) h(2) = (AF + CD) h(3) (3.32)
Again there are three unknowns and two equations, so there are more than one answer.
We choose the answer that corresponds to the lowest degree of h(1)(D), which is
h(1) = (CE + BF)
h(2) = (AF + CD)
h(3) = (AE + BD) (3.33)
Therefore, the formulae for rate 2/3 convolutional codes are
h(1)(D) = ( )(D)g(D)g(D)g(D)g (3)2
(2)1
(2)2
(3)1 ⋅+⋅
h(2)(D) = ( )(D)g(D)g(D)g(D)g (1)2
(3)1
(3)2
(1)1 ⋅+⋅
h(3)(D) = ( )(D)g(D)g(D)g(D)g (1)2
(2)1
(2)2
(1)1 ⋅+⋅ (3.34)
h(i)(D) can also be rewritten as:
h(i)(D) = mim
ii DhDhh 2)(2
)(1
)(0 ...+++ (3.35)
where i = 1,2 and m is the memory size of the convolutional code.
It should be noted that the number of coefficients in h(i)(D) of rate 2/3
convolutional codes is 2m+1, while that of rate 1/2 codes is m+1.

46
The semi-infinite H matrix for rate 2/3 convolutional codes is
H =
O
MMM
OMMM
)3(2
)2(2
)1(2
)3(2
)2(2
)1(2
)3(1
)2(1
)1(1
)3(0
)2(0
)1(0
)3(1
)2(1
)1(1
)3(0
)2(0
)1(0
mmm
mmm
hhhhhh
hhhhhhhhh
hhh
(3.36)
To clarify this method, an example of calculating the H matrix for a (3,2,2) convolutional
code is demonstrated below:
Given the transfer function matrix G(D) of this code as:
G(D) =
+++++
22
22
1111
DDDDDDD
(3.37)
Apply the formulae in Equation (3.33), we obtain
h(1)(D) = ( )(D)g(D)g(D)g(D)g (3)2
(2)1
(2)2
(3)1 ⋅+⋅
= 1*(1+D2) + D2*(1+D+D2)
= 1+D3+D4 => coefficients are 10011.
h(2)(D) = ( )(D)g(D)g(D)g(D)g (1)2
(3)1
(3)2
(1)1 ⋅+⋅
= (1+D+D2)* (1+D+D2) + 1*D
= 1+D+D2+D4 => coefficients are 11101.
h(3)(D) = ( )(D)g(D)g(D)g(D)g (1)2
(2)1
(2)2
(1)1 ⋅+⋅
= (1+D+D2)*(1+D2) + D2 * D
= 1+D+D4 => coefficients are 11001.

47
From the coefficients of h(i)(D), the H matrix for this particular (3,2,2) convolutional
code is
H =
O
O
111001111010001110010111110
111
(3.38)
Rate 3/4 convolutional codes:
For rate 3/4 convolutional code, Equation (3.21) is
⋅
(D)h(D)h(D)h(D)h
(D)g(D)g(D)g(D)g(D)g(D)g(D)g(D)g(D)g(D)g(D)g(D)g
(4)
(3)
(2)
(1)
(4)3
(3)3
(2)3
(1)3
(4)2
(3)2
(2)2
(1)2
(4)1
(3)1
(2)1
(1)1
= 0 (3.39)
With the simplified notation, Equation (3.22) becomes
⋅
(4)
(3)
(2)
(1)
hhhh
LKJIHGFEDCBA
= 0 (3.40)
Using the similar approach as in rate1/2 and rate 2/3 cases, the formulae for the h(i)(D)
can be computed. Since the intermediate steps are straightforward and very long, they are
omitted. In addition, the final formulae are quite long for rate 3/4 codes, so they are
expressed in terms of the simplified notations from Equation (3.40).

48
The formulae for rate 3/4 convolutional codes are
h(1)(D) = DGJ + DFK + BGL + CFL + BIK + CIJ
h(2)(D) = AGL + CEL + DEK + DGI + AHK + CHI
h(3)(D) = BHI + AFL + BEL + AHJ + DEJ + DFI
h(4)(D) = AGJ + CEJ + BEK + BGI + AFK + CFI (3.41)
Similar to the previous results, the H matrix for rate 3/4 codes consists of a repeated
block of coefficients of h(i)(D). The number of coefficients is 3m+1 for rate 3/4
convolutional codes.
H =
O
MMMM
OMMMM
)4(3
)3(3
)2(3
)1(3
)4(3
)3(3
)2(3
)1(3
)4(1
)3(1
)2(1
)1(1
)4(0
)3(0
)2(0
)1(0
)4(1
)3(1
)2(1
)1(1
)4(0
)3(0
)2(0
)1(0
mmmm
mmmm
hhhhhhhh
hhhhhhhhhhhh
hhhh
(3.42)
For rate (n-1)/n convolutional codes in general, there are n equations for h(i)(D), which
corresponds to n columns in each repeated block in the H matrix. In addition, the number
of coefficients is (n-1)*m+1.

49
3.6 Details of Steps in Decoding with VSD and Lists of 2 for (n-1)/n Convolutional
Codes
For block VSD, a fixed number of syndromes are computed once for each
received block. For convolutional VSD, however, the decoder starts with one syndrome
and increases the number of syndromes when it fails to decode. Thus, the decoding is not
as straightforward as in the block VSD case. The details of decoding steps of VSD for (n-
1)/n convolutional codes and lists of 2 are described below: [53]
1. The VSD decoder starts at the beginning of the received symbol sequence and
computes one syndrome based on the first n received symbols. For a (3,2,2)
convolutional code, it will compute the syndrome based on the first 3
symbols. If the syndrome is a zero vector, the decoder will assume that there
is no error in the first n received symbols. Then it will repeat this syndrome
computation for the next n symbols and so on until it discovers a nonzero
syndrome. If it reaches the end of the terminated convolutional outer code
without finding any nonzero syndrome, it will assume that there is no error in
that particular received sequence.
2. When the decoder discovers a nonzero syndrome, it will attempt to correct the
error(s) in the n symbols involved by first using only one syndrome. Note
that,, the only case that the decoder will succeed with one nonzero syndrome
is when there is only one error symbol in the n symbols involved and it has a
correct second choice. Suppose the first choices and the second choices are
represented by x’s and y’s respectively. The decoder will append an additional

50
n rows, which are xi - yi, xi+1 - y i+1,…, xi+n - yi+n (i is the index of the first
symbol in the n symbols involved), at the end of the syndrome matrix S. If
there are any duplication between the first row of S and one of the appended
rows, the error value is found and the error position is also known by
construction. When this happens, the decoder will make a correction. Then it
will move on to compute a syndrome for the next n symbols until it discovers
another nonzero syndrome or reaches the end of the received sequence.
3. If the decoder cannot make a correction with one syndrome, it will compute
an additional syndrome from the next n symbols. After that, it will append xi -
yi, xi+1 - y i+1,…, xi+2n - yi+2n at the end of the syndrome matrix S. If any of the
appended rows is in the row space of original S, it is the error value [49]. A
general way to discover this is to perform Gauss-Jordan column operations on
the modified syndrome matrix (syndrome matrix with the appended rows).
Suppose the rank of the original syndrome matrix S is “a”. After the Gauss-
Jordan operation, any of the appended rows that are nonzero only in the first a
positions are in the row space of the original S [49]. For the error symbols that
are recognized by the correct second choices, the decoder made correction and
change the syndrome matrix according to the correction.
4. The decoder then computes the null combinations and the error-locating
vector as shown in Section 3.1. Note that,, Gauss-Jordan column operation is
also performed in the search of null combinations. If the rank of S is the same
as the number of zeros in the error-locating vector, the decoder will proceed to

51
compute the exact error values. If the rank of S is less than the number of
zeros, the decoder will increase the number of syndromes and try again until
the two values are equal. If the rank of S is more than the number of zeros, the
decoder will stop decoding and report failure due to dependent errors.
5. The exact values of the error symbols are computed as shown in Section 3.1
Gauss-Jordan operation can also be used to find the inverse of Hsub.
6. After the decoder finishes making corrections, all symbols involved are
considered to be decoded as shown in Figure 3.1 and the decoder will move
ahead by n symbols and repeat the decoding operation.
If lists of more than two choices are employed, the number of appended rows is
simply increased. The decoding algorithm remains the same. For example, if the first,
second and third choices are represented by x’s, y’s and z’s respectively. For the case that
n received symbols are considered, the decoder will append an additional 2n rows, which
are xi - yi, xi+1 - y i+1,…, xi+n - yi+n, xi - zi, xi+1 - z i+1,…, xi+n - zi+n (i is the index of the first
symbol in the n symbols involved), at the end of the syndrome matrix S.
The algorithm can be readily extended to the case that some symbols have only a
list of one choice and others have a list of more than one choice. This might be more
realistic because each received symbol may have a different level of confidence. The
additional task for the decoder in this case is to keep track of the number of alternative
choices each symbol has and make correction to the right symbol.

52
3.7 Availability of Alternative Choices
The alternative choices at the input of the VSD can be obtained either from the
inner decoders, from multiple receiving antennas in a macro and microdiversity system,
from fast frequency-hopping spread spectrum system or from time-hopping spread
spectrum system. For a convolutional inner code, list Viterbi decoding algorithm (LVA)
can be employed as the inner decoder to provide a list of the L globally best candidates in
the order of likelihood after a trellis search [18,19]. In this thesis, list Viterbi decoding
algorithm with L = 2 will be used for computer simulations of a convolutional inner code.
By using multiple receiving antennas in the macro and microdiversity system [1,2] and
picking L (L = 2 in this thesis) best-decoded sequences for each symbol, we can also
obtain alternative choices for each symbol. From the structure of fast frequency-hopping
spread spectrum system, the alternative choices can be directly obtained. The detail on
fast frequency-hopping spread spectrum is described in Section 4.3.1.
Very recently, Ultra Wide Band Radio (UWB), which has been used in the radar
and remote sensing, has received a lot of interest for multi-access wireless
communications. UWB uses impulse radio technology combined with the time hopping
spread spectrum [22]. The idea is similar to the fast frequency-hopping spread spectrum
model proposed in section 4.3.1. And this system can also provide alternative choices.
Note that,, for the LVA case or the frequency hopping case, the L alternative choices are
always different. However, for the multiple antenna case, some or all of the L alternative
choices can be the same, and therefore there may actually be fewer than L unique choices

53
for each symbol. Since the VSD technique does not require that all inner decisions supply
the same number of choices, this is not a problem.

Chapter 4
VECTOR SYMBOLS
VSD deals with vector (nonbinary) symbols. These vector symbols can be from
many sources. For example, they may come from concatenated codes. Since concatenated
codes consist of inner and outer codes, each post-decoded inner code sequence can be
considered as a vector symbol for VSD, the outer decoder. The inner code can also be a
block code, a terminated convolutional code or a non-terminated convolutional code. For
the non-terminated convolutional code, the outer decoder can treat each group of r bits as
a vector symbol. Vector symbols may also result from spread spectrum system such as
frequency-hopping, time-hopping spread spectrum system or DS-CDMA (Direct
Sequence Code Division Multiple Access), where each symbol consists of many chips or
bits. Some papers on DS-CSMA with concatenated codes are [54,55]. In addition, they
may come from coded-modulation system, which was first proposed by Ungerboeck [56].
Various papers [23,57,58] suggested a use of coded-modulations with concatenated
codes. The details vary, but they all use Reed-Solomon codes as the outer codes. In the
coded-modulation scheme, the modulation part and the encoding part are designed
together to maximize the minimum Euclidean distance between pairs of coded signals.
Since each coded-modulation signal point consists of coded bits or coded bits plus
uncoded bit(s), it always represents a nonbinary symbol. Usually, nonbinary symbols
from this method consist of only a few bits each, but they can be extended to more bits
with the same principle.

55
Three different cases of vector symbols and their error statistics (symbol error
probabilities) are considered in this thesis. First, the inner code is a convolutional code
and list Viterbi decoding algorithm is used to supply a list of two alternative choices for
each outer symbol. Simulations for this inner code are done for a simplified two-state
fading channel, an AWGN channel and a Rayleigh fading with AWGN channel. Second,
the inner code is a random code. The random code may be a block or terminated
convolutional code. An analytical method for random codes is shown for simplified two-
state fading channel. For other types of channels, an analytical method is very difficult.
For the third case, frequency-hopping spread spectrum is used. Simulation for the third
case is done for a channel with interference, since interference is the main source of
errors for this scheme.
The simulations and analysis are done to discover the error statistics of these
vector symbols, which determine the performance of VSD. With a list of two alternative
choices for each outer symbol, the error statistics of interest are p1, which is the symbol
error probability of the first choice and p2, which is the symbol error probability of the
second choice given that the first choice is wrong.
4.1 Concatenated Code with a Convolutional Inner Code
The coding scheme is a concatenated code. Both the inner code and the outer code
are convolutional codes. For convolutional codes, the maximum likelihood sequence
estimator (MLSE), which is usually implemented by the Viterbi algorithm, is known to

56
be the optimum decoder [47]. However, the large number of states makes it impractical to
use the Viterbi algorithm for the outer code. In this thesis, the inner decoder uses the List
Viterbi Algorithm (LVA) and the outer decoder uses the Vector Symbol Decoding (VSD)
algorithm. LVA is employed instead of the normal Viterbi algorithm because it provides
an ordered-list of two or more likely sequences instead of only the most likely sequence.
The outer decoder VSD uses this extra information to improve its performance and
reduce its complexity.
4.1.1 In a Simplified Two-State Fading Channel
A simplified two-state model of independent fading channel assumed is basically
a binary erasure channel. When the channel is in a fade state, the received bit is an
erasure. When the channel is in a non-fade state, the received bit is assumed to be
perfectly demodulated (error-free). The received sequence is randomly generated
according to a range of the fading probability of the channel. The bit metric for the LVA
is assigned such that any decoded sequence that has at least one disagreeing bit from the
received sequence would be eliminated and would never be a survivor at the end of the
trellis search. This is because the simplified channel produces a received sequence that
contains either erasures or error-free (perfectly demodulated) received bits only.
Simulation is done for a range of fading probability to discover p1 and p2.

57
4.1.2 In an AWGN (Additive White Gaussian Noise) Channel
For simplicity, assume that the modulation is Binary PSK (phase shift keying).
For the detection at the receiver, it is well known that a matched filter, or an equivalent
correlator, is optimum for AWGN channel because it minimizes the error probability
[48]. This is basically because they provide maximum amplitude of the signal to the
amplitude of the rms (root mean square) noise at the sampling instant. A proof is shown
in [48]. Therefore, we assume coherent detection with a matched filter or a correlator and
a sampler at the receiver.
The metric for LVA can be either a Hamming metric for hard-decision decoding
or a Euclidean metric for soft-decision decoding. Since soft-decision decoding provides
better performance than hard-decision decoding, soft-decision decoding will be used.
Let the two binary PSK signals be s0(t) and s1(t), which can be represented by
- bE and + bE in a signal space diagram. The matched filter output at the sampling
instance for the kth signal interval is [47]
rk = kb nE +± (4.1)
where Eb is the energy per bit and nk is a zero-mean Gaussian random variable with
variance σ2 = N0/2.
The conditional probability density functions are
P(rk/s0) = 2
2)(
2
21 σ
σπ
bEkr
e+−
(4.2)
And

58
P(rk/s1) = 2
2)(
2
21 σ
σπ
bEkr
e−−
(4.3)
The log likelihood function, also known as the metric is
M(rk,s0) = ln[P(rk/s0)] = ln
+−
2
2)(
2
21 σ
σπ
bEkr
e
= ln 2
2
2)(
21
σσπbk Er +
−
= ln 2
2
22
21
σσπbbkk EErr ++
−
(4.4)
By omitting the unnecessary terms that are common to all metrics and the constants, the
kth bit metric is
M(rk,s0) = -rk for bit value 0 (4.5)
Similarly,
M(rk,s1) = rk for bit value 1 (4.6)
These M(rk,s0) and M(rk,s1) are the bit metrics for the LVA decoder. Note that,, with this
set of bit metrics, LVA selects the highest metric path as the most likely sequence.
Simulation is done for a range of Eb/No to discover p1 and p2.

59
4.1.3 In a Rayleigh Fading with AWGN Channel
For this case, a channel similar to the one assumed by Proakis [47] is employed.
Consequently, the bit metric is similar to that shown by him with some modifications.
The channel is assumed to be independently fading according to a Rayleigh distribution
for each bit. This may be justified by interleaving a long sequence of bits. In addition,
the channel is corrupted by Additive White Gaussian Noise (AWGN). To choose the
modulation scheme, we assume that channel does not fade slowly enough to track the
phase and so we cannot use phase shift keying. Also, amplitude shift keying is very
susceptible to fading channel. Therefore, frequency shift keying (FSK) is selected and
each encoded bit is transmitted using binary FSK with frequency separation of 1/T where
T is the bit period for orthogonality.
Since the phase is unknown, the receiver will use square-law-detection, which is
the optimized noncoherent detector of orthogonal signals. The coding scheme is a
concatenated code with inner and outer convolutional codes. The inner decoder uses
LVA and the outer decoder uses VSD. The bit metrics used in List Viterbi algorithm are
the outputs of the square-law-detector as shown in Figure 4.1.

60
Figure 4.1 Demodulation and Square-law detection of binary FSK signal (adapted from
Figure 5-4-3 in [47])
With the noncoherent detection of binary FSK, the two binary FSK signal
waveforms can be expressed as
s0(t) = )2cos(*2 tfTE
cb
b π ; 0 ≤ t ≤ Tb represents binary “0” (4.7)
s1(t) = ))(2cos(*2 tffTE
cb
b ∆+π ; 0 ≤ t ≤ Tb represents binary “1” (4.8)
Where Eb is the energy per bit, Tb is the bit duration and fc is the carrier frequency. ∆f is
chosen so that the signals are orthogonal. We use ∆f = 1/T, where T is the sampling
period. This ∆f is the minimum value for the two signals to be orthogonal when the phase
of the received signal is unknown. Note that,, for coherent detection where the phase is
known, the frequency separation required for orthogonality is 1/(2T).

61
The outputs after the correlators and the samplers for Rayleigh fading AWGN
channel are as follows:
Case 1: If s0(t) is transmitted,
xc = R* cb nE 00 )cos(* +φ
xs = R* sb nE 00 )sin(* +φ (4.9)
and
yc = n1c
ys = n1s (4.10)
Where R is the Rayleigh random variable with the following pdf:
pR(R)= 2
2
22
σ
σ
R
eR −, R ≥ 0 (4.11)
φ is the random phase which is a uniform random variable from 0 - 2π.
n0c, n0s, n1c, n1s are statistically independent zero-mean gaussian random
variables.
Case 2: If s1(t) is transmitted
xc = n0c
xs = n0s (4.12)
and
yc = R* cb nE 11)cos(* +φ
ys = R* sb nE 11)sin(* +φ (4.13)

62
The kth bit metrics that are suggested by Proakis [47] as the optimum metrics for
noncoherent detection are simply
M(xk) = (xc,k2+xs,k
2) for the bit value 0 (4.14)
and
M(yk) = (yc,k2+ys,k
2) for the bit value 1 (4.15)
Simulation is done by using these bit metrics with LVA decoder for a range of
average received power (Eb2 *R) to discover p1 and p2. Similar to the previous case, LVA
selects the highest metric path as the most likely sequence with these bit metrics.
4.2 Concatenated Code with a Random Inner Code in a Simplified Two-State
Fading Channel
Assume that the channel is a simplified two-state fading channel described in
Section 4.1.1. Consider a general (n,k) randomly chosen block or terminated
convolutional code. Suppose that x bits of an (n,k) codeword are erased due to fading.
This means that x columns of the generator matrix G become irrelevant to the decoding
of this codeword. If the rank of the undeleted columns in the G matrix is k, the codeword
is unique and the decoder will decode it successfully because the non-erased bits are
error-free for this type of channel. If the rank is k-1 instead of k, there are two possible
code words that correspond to the computed syndrome. In general, if the rank is k-i, there

63
are 2i possible code words that correspond to the computed syndrome. If the decoder
picks one choice out of the 2i possible code words randomly, the probability that the
selected one will be the correct codeword is 2-i. If the decoder picks two choices instead
of one, the probability that one of the two will be the correct codeword is 2-(i-1).
Therefore, we conclude that
P(succeed with 1 choice and j undeleted columns)
= ∑−
=
−1
02
k
i
i *P(j undeleted columns have rank k-i) (4.16)
P(succeed with 2 choices and j undeleted columns)
= P(j undeleted columns have rank k)
+ ∑−
=
−2
02
k
i
i *P(j undeleted columns have rank k-i-1) (4.17)
Obviously, P(j undeleted columns have rank more than j) = 0. Thus, we only need
to compute P(j undeleted columns with a particular rank), where the rank is at most equal
to j. To do this, consider two cases. The first case is that the j undeleted columns are
linearly independent and their rank is j. For j undeleted columns to be full rank (rank j),
there are two requirements. First, the first j-1 undeleted columns must be full rank (rank
j-1) and second, the last column must not be a member of the column space of the first j-
1undeleted columns. Since each column of G contains k bits, there are 2k -1 (excluding
an all zero column) possible values for each column. Since the column space of j-1

64
columns with full rank has 2j-1-1 members, the probability of selecting the last column
randomly such that it is not in the column space of the first j-1 columns is
−
− −
1222 1
k
jk
.
Therefore, we obtain
P(j undeleted columns with rank j) = P(j-1 undeleted columns with rank j-1)*
−
− −
1222 1
k
jk
(4.18)
Note that,, equation (4.18) can be computed recursively starting with P(1 undeleted
column with rank 1) = 1.
The second case is that the j undeleted columns have rank j-a; 0 < a < j, which
means that there are some dependent on these j columns. For the j columns to have rank
j-a, there are two different possibilities. The first possibility is that the first j-1 columns
have rank j-a-1 and the last column is not the member of the column space of the first j-1
columns. The second possibility is that the first j-1 columns have rank j-a and the last
column is a member of the column space of the first j-1 columns. Therefore,
P(j undeleted columns with rank j-a;0<a<j)
= P(j-1 undeleted columns with rank j-a-1)*
−
− −−
1222 1
k
ajk
+ P(j-1 undeleted columns with rank j-a)*
−−−
1212
k
aj
(4.19)
Equation (4.19) can be computed recursively with the initialization from Equation (4.20),
which is

65
P(j undeleted columns with rank 1) = P(all j undeleted columns are the same)
= 1
121 −
−
j
k (4.20)
Since we have found all P(j undeleted columns with a particular rank), Equation
(4.16) and (4.17) provide P(succeed with 1 choice and j undeleted columns), and
P(succeed with 2 choices and j undeleted columns) respectively. Note that,, j undeleted
columns from n total columns of G matrix means that there are x = n-j erased bits. Let the
probability of average erasure for each bit be Pavg,era. This probability determines the
quality of the channel. Then, the average probability of decoding failure with 1 choice
(denoted p1) is
p1 = ∑−=
=
1
0
nx
xP(x erased bits)*(1- P(succeed with 1 choice and x erased bits)) (4.21)
where
P(x erased bits) = ( ) ( ) xneraavg
xeraavg PP
xn −−
,, 1
And
P(succeed with 1 choice and x erased bits)
= P(succeed with 1 choice and n-x undeleted columns)
Similarly the average probability of decoding failure with 2 choices (denoted pf2) is
pf2 = ∑−=
=
1
0
nx
xP(x erased bits)*(1- P(succeed with 2 choices and x erased bits)) (4.22)

66
The final step is to compute probability that the second choice is wrong given that
the first choice is wrong (denoted p2). p2 comes from the events that the decoding also
fails with two choices given that the decoder has already failed with one choice.
Therefore,
p2 = pf2/p1 (4.23)
In this case, p1 and p2 are computed analytically.
4.3 Spread Spectrum in Channel with Interference
4.3.1 Fast Frequency Hopping Spread Spectrum
Figure 4.2 The fast frequency hopping spread spectrum in use (n frequencies, r chips).
f
ra chip
f1 f2 f3 . . . . . . . fn

67
In a fast frequency hopping spread spectrum system, a signal is transmitted by a
series of radio frequencies. Each signal (or symbol) is transmitted in r time units called
“chips” (see Figure 4.1). During these r time units, it is hopped from frequency to
frequency based on a pseudorandom sequence. As an example of fast frequency hopping
system, suppose there are 4 possible data values (00,01,10,11) and FSK (frequency shift
keying) is used. Then 4 frequencies f0, f1, f2, and f3 are used to represent each data value
respectively. Note that,, in this example, each symbol consists of 2 bits. Suppose 00 is to
be sent, the transmitted signal is a series of r sinusoid pulses with frequency f0+fi where fi
is changing from chip to chip based on the current pseudorandom number. Note that,, the
shifted frequencies fi can be in a different range of frequencies from f0 to f3. At the
receiver, the same pseudorandom code sequence is used to shift the frequencies back. For
an ideal channel and with only one user, the receiver should obtain one full row of the
same frequency after the signals are shifted back by the pseudorandom sequence. Chips
in other rows would be empty. The receiver then assumes that this frequency is the
selected frequency (e.g., f0). In a more realistic channel with noises, fading and
interferences from other users, the receiver will assume that the frequency that has the
highest number of hits (i.e., the row that is filled up most) is the transmitted frequency. If
this is not true, the received symbol is erroneous.
Suppose 256 frequencies and r chips/row are used. Note that,, r chips/row means
that r chips are sent per nonbinary symbols. For convenience, the sum of the selected
frequency and the shifted frequency is made to always be a member of the 256
frequencies. For example if f224 represents the data value and f90 represents the shifted

68
frequency in the first chip, then the transmitted waveform uses the frequency f58. The
number 58 is (224+90) mod 256.
256 frequencies usually mean that there are at most 256 possible data values and
thus, each symbol consists of 8 bits. However, higher number of bits per symbol is
preferred for VSD. A way to obtain higher number of bits per symbol is to use more
frequencies. Another way, which is suggested by Metzner is to represent each symbol by
2 frequencies instead of one. This means that in each chip, a symbol is transmitted by two
waveforms with different frequencies instead of one waveform. With this modification
and using 257 frequencies instead of 256 frequencies, there are 257*256/2 = 32896
combinations, which lead to 15 bits per each symbol (2^15 = 32768). The two
frequencies are shifted together based on a pseudorandom code sequence. As a result, the
actual transmitted signals in each of the r chips are two sinusoidal pulses with frequency
(ff+fi) mod 257 and (fs+fi) mod 257 where ff and fs is the first and the second selected
frequencies and fi is the shifted frequency generated from a pseudorandom number
source. Similar to the one frequency case, the appropriate pseudorandom code sequence
is used to shift the frequencies back. For an ideal channel, the receiver should detect 2
full rows, which correspond to the two selected frequencies. However, when there are
interferences, the wrong rows can get filled up and there can be cancellations in the
correct rows.
Since the frequency hopping method produces nonbinary symbols, vector symbol
decoding can be used directly on these symbols to provide higher reliability. To provide
list of 2 symbol decisions to the VSD, the receiver can pick the 3 most likely frequencies

69
(the 3 rows that filled up most) f1, f2, and f3 respectively instead of 2 frequencies. Since
each choice of a symbol consists of two frequencies, the first choice will be f1 and f2 and
the second choice will be f1 and f3. Similarly, the receiver can provide a list of 3,4,… if
needed.
Assume that there are n senders, that there are f frequencies (f = 257 here) and
that the probability that two hits in a chip cancel each other is Pcancel. The cancellation can
happen when the two hits have about the same strength and are approximately out of
phase. If there are more than two hits in a chip, we assume that there is no cancellation.
Consider each received hit as a vector; it is highly unlikely that three or more vectors will
add up to a zero or an almost zero vector.
To discover p1 and p2 for this system, simulation is done for a range of
cancellation probability p, the number of user n and the number of chips/row r.
4.3.2 Time-hopping spread spectrum
Figure 4.3 The equivalent time-hopping system (r blocks of t time units each).
Although frequency-hopping spread spectrum is used as an example, the similar
idea can be used for time-hopping spread spectrum too. The time-hopping system may
become more common since ultra-wide bandwidth time-hopping spread spectrum system
[22] has received a lot of attention lately for the applications of wireless multiple access
r blocks
t

70
communications. For the time-hopping system described in [22], baseband
subnanosecond pulses are transmitted directly without carrier. The bandwidth for this
system occupies the frequency range from DC to Gig hertz. The time-hopping pulses are
shifted by a pseudorandom hopping sequence.
For comparison purpose, the time-hopping system described in this section is the
one that is equivalent to the frequency-hopping system described previously. Instead of
using f frequencies and r chips/row in a frequency-hopping system, the equivalent time-
hopping system uses r blocks of t time units each as shown in Figure 4.2. Each time unit
in a block is equivalent to each frequency. Instead of f0 to f256, there are t0 to t256. Suppose
one frequency case is considered, the transmitted waveform for a symbol is a sequence of
r baseband subnanosecond pulses with one pulse in each of the r blocks. The pulses are
shifted in time (instead of in frequency) by a pseudorandom sequence. At the receiver,
the same pseudorandom sequence is used to shift the pulses back. The time unit that has
the highest hits is assumed to be the selected time unit. Similarly to the two-frequency
case, pairs of pulses can be shifted together to obtain 15-bit vector symbols.

Chapter 5
ERROR STATISTICS OF VECTOR SYMBOLS
To evaluate the performance of VSD, only the error statistics of these vector
symbols are necessary. The error statistics in terms of the symbol error probability of the
first choice (p1) and the symbol error probability of the second choice given that the first
choice is wrong (p2) are shown for the vector symbol sources described in Chapter 4.
5.1 A Convolutional Inner Code in a Simplified Two-State Fading Channel
The channel is assumed to be a simplified two-state fading channel. For the
simulation, the inner code is a terminated (2,1,4) convolutional code with 32 data bits (72
encoded bits) or 24 data bits (56 encoded bits). Therefore, each vector symbol, which is a
post-decoded inner code sequence, consists of 32 bits and 24 bits respectively. The
generator polynomial matrix for this code is G(D) = [1+D+D4 1+D+D3+D4]. The inner
decoder uses a LVA with a list of two. Given a range of probability of being in fade, the
simulation result is shown in Table 5.1 a) for 32-bit vector symbols and in Table 5.2 b)
for 24-bit vector symbols. Since the received bit is an erasure if the channel is in fade,
this probability can also be referred to as probability of erasure. Pera = 0.4 means that on
average, 40% of the received bits are erased.

72
Even with a range of such a high probability of being in fade (37-40.7%) for 32-
bit symbols, the symbol error probability of the first choice (p1) is only in the range of 6-
13% and the symbol error probability of the second choice given that the first choice is
wrong (p2) is only in the range of 18-30%. This is because a relatively low rate (rate ½)
and good convolutional code is used. The free distance for this code is 5. LVA is also a
very good decoder. Moreover, the LVA is used with a constraint that the decoded
sequences must not have any disagreeing bit with the received sequence. This helps
eliminate some fault sequences. The constraint can be used because of the assumption
that the received bit is either an erasure or an error-free bit for this channel.
For 24-bit symbols, both p1 and p2 are even lower than the 32-bit symbol case for
a given Pera. This is expected because the 24-bit symbol case has more redundancy than
the 32-bit symbol case. For the 24-bit symbol case, the ratio of data bits over total
number of encoded bits for each block is 24/56 = 0.4286. For the 32-bit symbol case, the
ratio is 32/72 = 0.4444.

73
Table 5.1 Error statistics of vector symbols from simulations of a (2,1,4) convolutional
inner code with LVA in two-state independent fading channel:
a) 32-bit symbols
Probability of being in fade
(Pera)
p1 p2
0.365 0.060 0.181
0.370 0.067 0.198
0.375 0.074 0.206
0.380 0.082 0.220
0.388 0.096 0.242
0.392 0.103 0.254
0.398 0.115 0.275
0.403 0.125 0.288
0.407 0.134 0.299
Table 5.1b) 24-bit symbols.
Probability of being in fade
(Pera)
p1
p2
0.380 0.059 0.193
0.382 0.061 0.197
0.388 0.069 0.212
0.395 0.079 0.228
0.40 0.086 0.240
0.405 0.094 0.253
0.410 0.103 0.265
0.415 0.112 0.277
0.420 0.122 0.291

74
5.2 A Convolutional Inner Code in an AWGN (Additive White Gaussian Noise)
Channel
The channel is assumed to be an AWGN channel. The modulation is binary-PSK
and the detector is a matched filter. For the simulation, the same terminated (2,1,4)
convolutional code with 24 data bits (56 encoded bits) is used. Soft-decision decoding is
employed in assigning the metric for the inner decoder, which uses LVA with list of two.
Given a range of received SNR (Eb/No), the simulation result is shown in Table 5.2. In
the same range of p1, AWGN channel gives much higher p2 than the two-state fading
channel. One reason is that when the most-likely decoded sequence (first choice) is
wrong, the channel is in a very noisy condition. Therefore, it is quite often that some
other fault sequence also has higher likelihood than the correct sequence.
Table 5.2 Error statistics of 24-bit vector symbols from simulations of a (2,1,4)
convolutional inner code with LVA in AWGN channel
.Eb/No (dB) p1 (24-bit) p2 (24-bit)
1.8 0.115 0.492
1.9 0.104 0.474
2 0.093 0.457
2.1 0.083 0.440
2.2 0.074 0.424
2.3 0.065 0.407
2.4 0.058 0.391
2.5 0.051 0.375
2.6 0.044 0.359
2.7 0.039 0.343

75
5.3 A Convolutional Inner Code in a Rayleigh Fading with AWGN Channel
The channel is assumed to be a Rayleigh fading with AWGN channel. The
modulation is binary-FSK and the detector is a square-law-detector, which is an optimal
noncoherent detector for orthogonal signals. The same inner code and inner decoder as
described in AWGN channel are used in the simulation. Given the range of average
received power (R2 *Eb), the simulation result is shown in Table 5.3. Note that,, R is the
Rayleigh parameter and Eb is the energy per bit. The result shows that the p1 is worse
than the AWGN channel, which is expected because the present channel has both fading
in addition to noise. However with the same range of p1, this channel has a lower p2 than
the AWGN channel. This is because the likelihood of the decoded sequence for the
fading channel depends on both the fading factor and the noise. The fading factor makes
all sequences less likely be it a correct sequence or a wrong sequence, while the noise
may make the fault sequence more likely and the correct sequence less likely.

76
Table 5.3 Error statistics of 24-bit vector symbols from simulations of a (2,1,4)
convolutional inner code with LVA in a Rayleigh fading with AWGN channel
Eb
Rayleigh
parameter (R)
Average received
power in dB
(10logR2*Eb)
p1
p2
5 0.90 6.0746 0.214 0.559
5 0.95 6.5442 0.145 0.488
5 0.97 6.7251 0.123 0.459
5 1.00 6.9897 0.096 0.418
5 1.03 7.2464 0.075 0.378
5 1.05 7.4135 0.063 0.353
5 1.07 7.5774 0.053 0.329
5 1.10 7.8176 0.040 0.295

77
5.4 A Random Inner Code in a Simplified Two-State Fading Channel
The channel is assumed to be a simplified two-state fading channel. Analytical
method is used to discover p1 and p2 for random codes. For comparison, a (72,32) random
code is considered. This code has the same length and rate as the terminated (2,1,4)
convolutional code with 32 data bits. Given a range of probability of erasure Pera, the
analytical result is shown in Table 5.4. The result shows that p1 and p2 of random code is
lower than p1 and p2 of the (2,1,4) terminated convolutional code for the same Pera.
Although this result gives some insight to the range of p1 and p2, it is not convenient to
use a random code since there is no practical decoding technique especially to discover a
list of alternative choices. Moreover, it is difficult to derive the equations for other types
of channels.

78
Table 5.4 Error statistics of 32-bit vector symbols from analytical result of a (72,32)
randomly chosen code in two-state fading channel
Pera p1 p2
0.375 0.003 0.130
0.4 0.008 0.191
0.425 0.020 0.263
0.45 0.047 0.342
0.455 0.054 0.359
0.46 0.063 0.376
0.465 0.073 0.393
0.47 0.083 0.410
0.475 0.095 0.427
0.48 0.109 0.444
0.485 0.123 0.462
0.49 0.139 0.479

79
5.5 Fast Frequency-Hopping Spread Spectrum in Channel with Interferences
Assume that the frequency hopping spread spectrum system is as described in
Section 4.3.1 with 257 frequencies and selecting two frequencies for each symbol. Thus,
each vector symbol consists of 15 bits. The channel is assumed to have interferences.
This is the usual assumption for a spread spectrum channel since many users are
transmitting at the same time and their signals may interfere with each other. For high
efficiency channel, most errors are due to interference rather than noise. Therefore, the
effect of the noise is disregarded in this simulation. The efficiency is measured in terms
of bits/chip. To decide whether a chip is empty, a threshold value can be set. If the
received signal strength is lower than the threshold value, then the chip is considered
empty. Therefore, the probability of cancellation is the probability that there are two hits
in the same chip and that they cancel each other by being approximately out of fade and
have about the same strength.
In the simulation, a certain range of probability of cancellation is assumed. Given
a set of probability of cancellation, number of users and the number of chips/row, the
simulation result is shown in Table 5.5. The result shows that p1 are low even with the
relatively high efficiency. Notice that p2 are quite higher than in other cases and their
values do not necessarily increases when the values of p1 are increased as in all previous
cases. This is because the frequency-hopping spread spectrum system is very different
from the convolutional inner codes and random inner codes. When Pcancel is increased, the
channel condition is worse and it can be seen from that the probability that the correct

80
code word is not in the first three choices is increased. So the error statistics are not
unexpected.
For no cancellation case (Pcancel = 0), p2 is very high (about 0.5) but the
probability that the correct one is not in the first three choices is very low. This is because
when there is no cancellation, the errors are due to the ties of the full scores. For example,
suppose there are three frequencies fi, fj and fk that have full scores (i.e., all chips in their
role are hit and since there is no cancellation, none appears empty). Since the three are
tie, the decoder picks a set of two frequencies at random to be the first choice (e.g., fi and
fj), another set of two frequencies to be the second choice (e.g., fi and fk) and another set
to be the third choice (e.g., fj and fk). Suppose the first choice is wrong. Then there is
about 50% chance that the second choice is correct and 50% chance that the third choice
is the correct. Therefore, p2 is about 0.5. If the decoder is allowed a list of three choices,
it is obvious that the decoder will definitely be correct for this case. The decoder can still
be wrong if there are more than three frequencies that have full scores. However, these
events are rare and thus, the probability that the correct is not in the first three choices are
very low. As a result, in this frequency hopping system, lists of three choices should
provide a noticeable improvement on the lists of two choices especially if the vector
symbol size is larger than 15 bits. However, for this small symbol size, the number of
wrong recognitions is also increased when the list size is increased. The wrong
recognitions will be discussed in Section 7.1.1. For this thesis, we will limit the lists to
two choices.

81
Table 5.5 Error statistics of 15-bit vector symbols from simulation result of fast
frequency- hopping spread spectrum in channel with interferences.
a) 60 users, 9 chips/row, efficiency = 0.389 bits/chip
Pcancel p1 p2
P(correct one is not in
the first three)
0 0.0215 0.5033 0.00028
0.005 0.0275 0.4230 0.00148
0.01 0.0331 0.3941 0.00286
0.02 0.0442 0.3615 0.00560
0.03 0.0551 0.3607 0.00902
0.04 0.0655 0.3624 0.01228
0.05 0.0764 0.3697 0.01618
0.06 0.0875 0.3728 0.02006
0.07 0.0985 0.3845 0.02470
0.08 0.1097 0.4000 0.03018
0.09 0.1217 0.4097 0.03572
0.1 0.1333 0.4244 0.04196

82
Table 5.5 b) 60 users, 10 chips/row, efficiency = 0.350 bits/chip
Pcancel p1 p2
P(correct one is not
in the first three)
0 0.0086 0.4731 0.00001
0.01 0.0135 0.3713 0.00064
0.02 0.0199 0.3089 0.00178
0.03 0.0260 0.2898 0.00304
0.04 0.0321 0.2829 0.00450
0.05 0.0390 0.2973 0.00668
0.06 0.0468 0.3015 0.00890
0.07 0.0540 0.3048 0.01084
0.08 0.0613 0.3250 0.01388
0.09 0.0695 0.3479 0.01752
0.1 0.0782 0.3575 0.02104

83
Table 5.5 c) 70 users, 10 chips/row, efficiency = 0.409 bits/chip
Pcancel p1 p2
P(correct one is not
in the first three)
0 0.0268 0.5142 0.00042
0.01 0.0428 0.4031 0.00412
0.02 0.0585 0.3830 0.00858
0.03 0.0730 0.3812 0.01364
0.04 0.0887 0.3823 0.01908
0.05 0.1031 0.4010 0.02600
0.06 0.1182 0.4104 0.03246
0.07 0.1329 0.4277 0.04012
0.08 0.1478 0.4444 0.04822
0.09 0.1608 0.4618 0.05592
0.1 0.1744 0.4739 0.06372

84
Table 5.5 d) 80 users, 12 chips/row, efficiency = 0.389 bits/chip
Pcancel p1 p2
P(correct one is not
in the first three)
0 0.0161 0.4956 0.00014
0.01 0.0287 0.3587 0.00216
0.02 0.0410 0.3335 0.00524
0.03 0.0534 0.3258 0.00856
0.04 0.0674 0.3312 0.01316
0.05 0.0807 0.3475 0.01812
0.06 0.0946 0.3671 0.02378
0.07 0.1077 0.3916 0.03024
0.08 0.1216 0.4170 0.03754
0.09 0.1356 0.4356 0.04504
0.1 0.1495 0.4569 0.05332

Chapter 6
RECURSIVE METHOD FOR EVALUATING LARGE VECTOR UPPERBOUND PERFORMANCE OF VSD
A relatively simple recursive method to discover the weight structure of any
convolutional code is presented. The performance of VSD is evaluated in terms of the
large vector union upper bound decoding failure probability for the whole block of
terminated convolutional codes [59]. This decoding failure probability can be readily
compared with the computer simulation results. Note that,, the large vector upper bound
means that it is the upper bound for the case that each (vector) symbol contains a large
number of bits such that the error symbols are linearly independent.
Assumption: The error symbols are linearly independent. List of 2 inner symbol decisions
is used. Each symbol is independent identically distributed with symbol error
probabilities p1 and p2 as defined below.
Define:
p1 = symbol error probability of the first choice. (q1 = 1-p1)
p2 = symbol error probability of the second choice given that the first choice is wrong.(q2
= 1-p2)
t = index of the interval or the number of intervals until termination in a trellis
diagram.

86
tNs(w) = number of nonzero code word paths of weight w starting at interval 0 and
ending at state s at interval t, with the following properties: 1) They depart from
state S0 at interval 0 and 2) If they return to state S0 later, they do not depart from
state S0 again.
tN(w) = number of nonzero code word paths of weight w that depart from state S0 where
there are t intervals until the termination, and return only once to state S0. Thus,
tN(w) = tN0(w) where t is the number of intervals until the termination.
Pe(w) = probability of failure due to covering exactly one particular code word of
weight w.
Pu = large vector union upper bound decoding failure probability.
6.1 Compute tNs(w) and tN(w) (the Weight Structure):
The weight of a code word is the number of “1’s” in the code word. For example,
the code word 001101110000 is of weight five. To compute tNs(w) of a convolutional
code, consider the structure of the code from its trellis diagram. Any convolutional code
can be expressed in a trellis diagram. For example, a simple (2,1,2) convolutional code
with the generator polynomial G(D) = [(1+D2) (1+D+D2)] has the encoder circuit
shown in Figure 2.1 and the trellis diagram shown in Figure 2.3. More information on
convolutional codes and trellis diagram can be found in [27,33].
The trellis diagram repeats itself in every interval except at the beginning and the
end. At the beginning, the encoder circuit is always initialized to state 00 or S0, which

87
means that both memory registers contain 0. Therefore, the trellis always departs from
state S0 at t = 0 and not all states in the trellis can be reached in the beginning. At the end,
the encoder is fed with a zero sequence to clear the registers. Therefore, the trellis always
ends at state S0.
The all-zero sequence, which starts from state S0 and stays in the same state until
termination, is disregarded because its weight is known to be zero. Observe that the set of
all nonzero code word paths that start from state S0 at t = 0 has the same structure as all
nonzero code word paths that start from state S0 at t = 1, t = 2 and so on except for the
fact that those that start at a later time consist of fewer intervals before they are
terminated. From this observation, we will find the recursive formula to compute the
weight of those paths that start at t = 0 only. The weights of those that start at a later
interval can be computed the same way with the appropriate number of intervals.
a) b)
Figure 6.1 An interval of the trellis diagram for the (2,1,2) code. The number(s) of each
transition path represent a) output values and b) the number of output “1”.
Consider an interval of the trellis diagram for this simple (2,1,2) code in Figure
6.1a). There are 4 (memory) states in the trellis: s = 00, 01, 10, and 11 (or s = 0 to 3). To
0
2 2 0
1
1
1 1
00
11 1100
01
10
01 10
00 01 10 11
00 01 10 11

88
find tNs(w), we need only to know the number of output “1’s” for each transition path
(shown in Figure 6.1b) because this is the increment in weight from the previous state at
the end of (t-1)th interval to the next state at the end of tth interval. Then we can find all
tNs(w) recursively as follows:
tN0(w) = t-1N1(w-2) + t-1N0(w); t > 1 (6.1)
tN1(w) = t-1N2(w-1) + t-1N3(w-1); t > 1 (6.2)
tN2(w) = t-1N1(w); t > 1 (6.3)
tN3(w) = t-1N3(w-1) + t-1N2(w-1); t > 1 (6.4)
At t =1, there is only one binary code word of weight two.
The term t-1N0(w-2) is omitted from Equation (6.3), based on the definition of tNs(w).
Any computer program such as C++ can readily implement these recursive
equations. The first two intervals should be hard-coded in the program because not all
states can be reached in those intervals. Then tN(w) is simply tN0(w) where t is the
number of intervals until the termination. This tN(w) is the total number of terminated
code words with weight w at the end of the tth interval, which will be used in calculating
the union upper bound decoding failure probability of the whole block of terminated
convolutional codes. This probability will be compared with the computer simulation
result to show that they are very close.

89
For a higher rate and higher memory convolutional code than the (2,1,2) code, it
is very tedious to find the appropriate recursive equations by constructing the initial
stages of the trellis diagram. However, a program can be devised in order to find the
tNs(w) equations directly from the generator polynomial matrix.
Consider a (3,2,2) convolutional code with the generator polynomial matrix G(D)
=
+++++
22
22
1111
DDDDDDD
. We may rewrite G(D) as
G(D) =
110101
+ D
101001
+ 2
110011
D
(6.5)
This new equation separates the encoder into three terms. The first term shows
that effect of the current input bits (called x and y). The second term affects the most
recent previous input bits (called a and c) and the third term affects the second most
recent previous input bits (called b and d). Specifically, x, a and b correspond to the top
row of G(D), while y, c, and d correspond to the bottom row of G(D). Let out0 out1 and
out2 be the three output bits at each time interval. The output bits can be computed by
[out0 out1 out2] = [x y]
110101
+ [a c]
101001
+ [b d]
110011
(6.6)
= [(x+a+b+c) (y+b+d) (x+y+c+d)] (6.7)
There are 16 states in the trellis diagram from state S0 (abcd = 0000) to state S15
(abcd = 1111) and there are 4 branches coming out of each state. Equation (6.7) provides
a simple means of evaluating the state transition weights. The branch weights are simply

90
the number of “1’s” in the corresponding output bits. In addition, the next states are
updated by
b’ = a, a’ = x, d’ = c, c’ = y (6.8)
This program should show which four current states are the inputs of a particular
next state and also show the corresponding branch weight. This result is summarized and
shown in Table 6.1.
Table 6.1 Weight Distribution of the (3,2,2) convolutional code
Input states Output state Branch weight
0,1,4,5 0 0,2,2,2
2,3,6,7 1 2,2,2,0
(0),1,4,5 2 2,0,2,2
2,3,6,7 3 2,2,0,2
8,9,12,13 4 1,3,1,1
10,11,14,15 5 1,1,3,1
8,9,12,13 6 3,1,1,1
10,11,14,15 7 1,1,1,3
(0),1,4,5 8 2,2,2,0
2,3,6,7 9 0,2,2,2
(0),1,4,5 10 2,2,0,2
2,3,6,7 11 2,0,2,2
8,9,12,13 12 1,1,3,1
10,11,14,15 13 1,3,1,1
8,9,12,13 14 1,1,1,3
10,11,14,15 15 3,1,1,1

91
This Table can be used for two applications. The first one is to find the complete
weight distribution of this code. The second one is to find the weight distribution for our
purpose, which will be explained shortly. The complete weight distribution can also be
found by modifying the state diagram of the convolutional code and applying Mason’s
gain formula [27]. The Mason’s gain formula is also useful in finding additional
information about the structure of the code. However, it becomes impractical as the total
encoder memory (i.e., the sum of all the shift register lengths) exceeds 4 or 5 [27]. In this
thesis, a recursive method explained earlier is used instead of the Mason’s gain formula
since the weight structure for our purpose cannot be computed by Mason’s gain formula.
In addition, this recursive method is more practical for higher total encoder memory than
the Mason’s gain formula’s method since it can be programmed easily.
Notice that the input states 0 are in the parenthesis (0) for all equations except the
one that corresponds to output state 0. If the complete weight distribution is desired, the
terms in the parenthesis should be included and all recursive equations have four terms.
However, for our purpose, the terms in the parenthesis are disregarded and some
equations have three terms.
To understand why some terms are disregarded, consider that our goal is to
compute the upper bound performance of the VSD decoder. As previously stated, VSD
with alternative choices can correct if the errors are at least one position away from
covering any code word with the requirement of one correct alternative choice. In other
words, for every code word, at least one position of the code word is error-free, and at
least one additional position is correct in either the first or the second choice. Consider

92
two code words of a (2,1,2) convolutional code. One is (11 01 11 00 00 00 00 00 00). The
other is (00 00 00 00 11 10 10 11 00). The sum of these two is a third code word (11 01
11 00 11 10 10 11 00). Consider the sum of the probabilities of the events that cause
failures due to the first code word and the events that cause failures due to the second
code word. This sum has already included the events that cause failure due to the third
code word. Therefore, a union upper bound on decoding failure probability should
include only code words that depart just once from state S0; otherwise the bound would
be looser. Consequently, the term t-1N0(.) is omitted from all recursive equations except
for the one that we calculate tN0 (w). As a first step, we find recursive equations for the
weight distribution of code word paths that depart from state S0 at t = 0 and never again
part after returning to state S0.
The recursive equations can be expressed directly from Table 6.1. The equation
for tN0(w) comes from the first row. Equation for tN1(w) comes from the second row and
so on. There are a total of 16 equations corresponding to the number of states for the
(3,2,2) convolutional code. The first few equations are demonstrated as examples.
tN0 (w) = t-1N0(w) + t-1N1(w-2) + t-1N4(w-2) + t-1N5(w-2); t > 1 (6.9)
tN1 (w) = t-1N2(w-2) + t-1N3(w-2) + t-1N6(w-2) + t-1N7(w); t > 1 (6.10)
tN2 (w) = t-1N1(w) + t-1N4(w-2) + t-1N5(w-2); t > 1 (6.11)
At t = 1, there are only three code word paths of weight two.
Then, tN(w) is simply tN0 (w) where t is the number of intervals until the termination.

93
6.2 Find Pe(w) (the Probability of Failure due to Covering Exactly One Particular
Code word of Weight w):
For VSD with the list of two, there are two cases that the decoder will fail to
decode due to violating the coverage condition for a code word.
Case 1) All “1’s” positions in the code word have incorrect first choices.
The probability that this event occurs for a code word of weight w is p1w.
Case 2) One of the “1’s” positions in the code word has a correct first choice. The rest of
them have incorrect first and second choices.
The corresponding probability is wq1(p1p2)w-1
Since both cases are mutually exclusive, we have
Pe(w) = p1w + wq1(p1p2)w-1 (6.12)
6.3 Find Pu (the Large Vector Union Upper Bound Decoding Failure Probability):
This union upper bound is basically the sum of the product of the probability of
failure due to covering a particular code word and the number of terminated code words
at each weight.
Pu = ∑ ∑=
⋅w
t
ttet wPwN
max
min
)()( (6.13)
The summation starts from tmin because we consider only terminated
convolutional code words. The nonzero code words have a certain minimum weight and

94
thus, there is a certain minimum number of intervals for a path to depart from state S0 and
merge back to state S0. For example, any terminated code word of the (3,2,2) code with
G(D) in Equation (6.5) has a minimum weight of five and it takes at least three intervals
to depart from state S0 and merge back to state S0. Therefore, tmin is 3 for this code. tmax
depends on the length of the terminated code. For example, a code of length 21 of the
(3,2,2) code has three output bits for each interval and, thus tmax = 21/3 = 7.

Chapter 7
COMPARISON PERFORMANCE WITH NON-INTERLEAVED REED-
SOLOMON CODES
In this chapter, the performance of VSD is compared to that of non-interleaved
Reed-Solomon codes. Non-interleaved Reed-Solomon code means that the code uses the
same large vector symbol size as the VSD directly. The discussion on interleaved Reed-
Solomon codes, which improve the performance of Reed-Solomon codes and their results
in comparison to VSD, will be in Chapter 8. The comparisons are done mainly in terms
of decoding failure probability for the whole block of the received sequence for both
Chapter 7 and 8. The received sequence is a concatenated code with various types of
inner codes and a terminated convolutional outer code. Both VSD and Reed-Solomon
codes are assumed to use the same data length and data rate.
7.1 Methods
In addition to the principle of VSD and the decoding steps described in Chapter 3,
a few more concepts should be discussed before illustrating the results. The first issue is
the meaning of comparison results between VSD and Reed-Solomon code in this thesis.
VSD is actually a decoding algorithm for a general code, while Reed-Solomon code is a

96
restricted class of block code. Therefore, the comparisons are between the two cases as
follows:
1) Select a terminated convolutional outer code and use VSD as the decoding
algorithm.
2) Use the maximum distance code (or Reed-Solomon code) as an outer code with
the same data length and data rate as the terminated convolutional outer code. In this
Chapter, both cases also use the same symbol size directly. The decoding algorithm is
any algorithm that can decode a Reed-Solomon code.
The performance of VSD in terms of decoding failure probability can be found by
two approaches. The first approach is by calculating the large vector union upper bound
decoding failure probability from Chapter 6. The second approach is by using computer
simulation. The computer simulation results will be compared with the large vector union
upper bound decoding failure probability from Chapter 6 and with Reed-Solomon codes.
For Reed-Solomon codes, their performances are discovered using their error correcting
probabilities rather than implementing the actual decoder.
The second issue is the effect of symbol size on the performance of VSD. This
effect as well as a way to reduce the decoding failure probability due to some failure
events for smaller symbol size such as 16-bit symbols is discussed in section 7.1.1. Note
that,, the reduction is not necessary for large symbol size such as 24-bit or 32-bit symbols
since the associated decoding failure probability due to these failure events is negligible
for large symbol size.

97
The third issue is the use of erasures. It is well known that Reed-Solomon codes
are optimum codes when there are either erasures or error-free symbols, but no erroneous
symbols. On the other hand, the current VSD used in this thesis can handle erroneous
symbols, but not erasure symbols. VSD can be modified to handle a mixture of errors and
erasures and some preliminary work for a special case has been shown by Metzner in
[26], but more study needs to be done. However, it is interesting to see the comparison
between VSD with errors only and Reed-Solomon code with a mixture of errors and
erasures. Therefore, this comparison is done for the case of randomly chosen inner code
in the simplified two-state fading channel because it is possible to find analytical result
for the performance of Reed-Solomon code with mixture of errors and erasures in this
condition. The analytical method is described in section 7.1.2.
Finally, Section 7.1.3 presents some details on the implementation of VSD
algorithm. It includes a way to reduce the number of computations by doing some
operations at the bit level instead of at the byte (or 32-bit word) level since each position
is a binary number.
7.1.1 Effect of the Size of Vector Symbols on Performance of VSD
The size of the vector symbols is important for the validity of the linear
independence assumption. Since the decoder considered in this thesis assumes that error
symbols are linearly independent, VSD will fail with closely-spaced dependent errors. If
the dependent errors are further apart such that they are not involved in the same

98
decoding attempt of VSD, they will have the same effect as linearly independent errors
and not necessarily cause decoding failure. Moreover, the alternative choices sometimes
help eliminate the dependent error symbols too. Although a modification of VSD for
dependent errors is discussed in [49], that modification is not used in this thesis.
From simulations, a vector symbol should consist of about 24 to 32 bits or more.
There are two additional sources of decoding failure when this constraint is not met. The
first one is due to events that there are dependent errors among the first choice symbols.
The second one is due to the use of list decoding to simplify the decoding. Recall the
assumption that the differences between the first and the second choices are the true error
values when they are in the row space of the syndrome matrix S. When a difference is
recognized as the true error value, the corresponding received symbol is corrected
immediately. For a large vector symbol size, this assumption is almost always true.
However, when the vector size is too small, many cases of wrong recognitions, which
lead to wrong corrections, occur.
Some of the wrong recognitions can be avoided to reduce the probability of
decoding failure for the smaller symbol size. To see this, consider an example. Suppose
the outer code is a (2,1,2) convolutional code with G(D) = [1+D2,1+D+D2]. Use the same
notations as in Section 3.4 that 0 means the first choice symbol is correct while ei’ is the
value of the first choice symbol error when the second choice is correct and ei is the value
of the first choice symbol error when the second choice is also incorrect. Assume that
VSD currently uses two syndromes and the error matrix E is

99
E =
00ee
2
1
(7.1)
The (binary) parity check matrix H for 2 syndromes is
H =
11100011
(7.2)
and the syndrome matrix S is
S = H*E =
+
1
21
eee
(7.3)
The modified syndrome matrix S’ is
S’ =
+
4
3
2
1
1
21
xxxxe
ee
(7.4)
Suppose e1+e2+x4 (i.e., s1+x4) accidentally equals to 0 (a zero vector), where s1 is
the first syndrome vector in the S as well as S’ matrix and x4 is the difference between the
first and the second choice of the 4th symbol and it has no significant meaning since this
symbol is correct. However, x4 is in the row space of the syndrome matrix S.
Consequently, the decoder recognizes that it is the true error value of the 4th symbol and
might correct the 4th symbol with this error value. Obviously, this correction is wrong. To
avoid this type of wrong correction, the decoder should check whether the 4th symbol is
involved in the calculation of the syndrome vector(s) that it is in the row space of. For

100
this example, x4 is in the row space of the first syndrome, which involves only the 1st and
the 2nd symbols. Since the 4th symbol is not involved in this syndrome calculation, the
recognition must be false and the decoder should not do anything.
For another example, suppose s1+s2+x1 = 0. Usually the decoder will correct the
first symbol with the value of x1. However, this is a wrong correction because
s1+s2+x1 = e1+e2+e1+x1 (7.5)
= e2 +x1 (due to modulo 2)
Since there is an even number of e1 in the calculation, its effect is canceled and
therefore it is seen that x1 is not the true error value of the first symbol. By checking this,
the decoder will not make this type of wrong corrections. In general, the recognized error
symbol is not involved in the syndrome calculation if the corresponding received symbol
is not involved at all or involved for an even number of times. Note that,, Gauss-Jordan
Reduction is useful in determining which set of syndrome vector(s) and appended row
add to a zero vector.
For sufficient vector symbol size, the decoder needs not check this since the
chance of this happening is negligible. However, for smaller symbol size, this additional
check will help reduce the decoding failure probability of VSD.

101
7.1.2 Probability of Decoding Failure of Reed-Solomon Codes with a Mixture of
Errors and Erasures for Random Inner Codes in the Two-State Fading Channel
In this thesis, both VSD and Reed-Solomon code are usually assumed to deal with
received blocks that may contain errors, but no erasures. This may not be fair for Reed-
Solomon code since it is the best code for correcting erasures. Specifically, Reed-
Solomon code will be successful when
2e + t < dmin (7.6)
where e is the number of symbol errors
t is the number of symbol erasures
dmin is the minimum distance of the outer code
For a Reed-Solomon code,
dmin = N-K+1 (7.7)
where N is the total number of symbols for an outer codeword
K is the number of data symbols for an outer codeword
For Reed-Solomon codes, a threshold is set to determine whether a symbol should be
erased. A symbol is erased if it is not reliable enough. That is it has a high probability of
being wrong. The threshold may be set by parameters such as the likelihood of the
symbol. For a given inner code, it is not easy to find what the optimum value of threshold
should be. However, for the randomly chosen inner code in the simplified independent
two-state fading channel, the condition for erasing a symbol is clear. Based on the
discussion in Section 4.2, there are 2i possible code words that correspond to a syndrome

102
when the rank of the G matrix is k-i, where k is the number of data bit for the inner code.
If the inner decoder is assumed to select one of the 2i possible code words at random, the
probability that a symbol with this condition is correct is 2-i. If i is zero, the decoder is
always correct. If i is one, the decoder is correct half of the time. From Equation (7.6), it
is seen that two erasures have the same effect as one error on the correction capability of
Reed-Solomon code. Therefore, if i is one, the symbol can be considered as an error or an
erasure. It is assumed to be an error in this thesis. If i is more than one, however, the
chance that the decoder will be wrong is more than the chance that it will be right and
thus, the symbol should be erased.
To compute the decoding failure probability of Reed-Solomon analytically, there
are three steps:
Step 1: Compute the symbol error probability (denoted Psym,e)
Since the inner decoder is wrong half of the time when the G matrix has rank k-1, the
symbol error probability is
Psym,e = 1/2 * P(G matrix of a symbol has rank k-1) (7.8)
Equation (7.8) can be written as
Psym,e = 1/2 * [ ∑−=
n
kj 1
P(G matrix of a symbol has rank k-1 given j undeleted columns)*P(j
undeleted columns)]
= 1/2* [ ∑−=
n
kj 1
P(j undeleted columns with rank k-1)*P(j undeleted columns)] (7.9)

103
The first term on the right of Equation (7.9) can be computed recursively by using
Equation (4.18)-(4.20) in Section 4.2. In fact, these probabilities have been computed in
the intermediate steps of finding the error statistics of the random inner code in Section
4.2. The second term is computed as follows:
P(j undeleted columns) = ( ) ( ) jneraavg
jeraavg PP
jn −−
,,1 (7.10)
Where Pavg,era is the probability of average erasure for each bit be defined in Section 4.2.
Substitute the values of P(j undeleted columns with rank k-1) computed in Section 4.2
and Equation (7.10) into Equation (7.9) and Psym,e is found.
Step 2: Compute the symbol erasure probability (denoted Psym,t)
Since a symbol is erased when the G matrix has rank k-2 or less, the symbol erasure
probability is
Psym,t = 1 - P(G matrix of a symbol has rank k)
- P(G matrix of a symbol has rank k-1) (7.11)
Note that,, Equation (7.11) follows from the fact that the rank of the G matrix for k data
bits cannot be more than k.
Equation (7.11) can be expressed as

104
Psym,t = 1 - [∑=
n
kjP(G matrix of a symbol has rank k given j undeleted columns)*P(j
undeleted columns)] - 2* Psym,e
= 1 - [∑=
n
kjP(j undeleted columns with rank k)* P(j undeleted columns)]
- 2* Psym,e (7.12)
P(j undeleted columns with rank k) can be computed recursively by using Equation
(4.18)-(4.20) in Section 4.2 and they have already been computed in section 4.2.
Futhermore, P(j undeleted columns) and Psym,e were computed in step 1.Therefore, Psym,t
is found.
Step 3: Compute the decoding failure probability of the Reed-Solomon code (denoted
PRS,fail)
Finding the decoding failure probability is the same as finding the decoding success
probability (denoted PRS,succeed) since
PRS,fail = 1 - PRS,succeed (7.13)
PRS,succeed can be expressed in terms of the error correction capability as
PRS,succeed = P(2e + t < dmin)
= ∑ ∑−
=
−−
=
12
0
12
0
min
min
d
e
ed
tP(e error symbols and t erasure symbols in a received block)
(7.14)

105
The limits come from the condition 2e + t < dmin. The a refers the “ceiling” of the
number “a”, which is the smallest integer that is equal to or more than “a”.
Assume that each symbol is statistically independent, then
P(e error symbols and t erasure symbols in a received block)
= teNtsymesym
ttsym
eesym PPPP
teN
eN −−−−
−
)1.(. ,,,, (7.15)
From Equation (7.13)-(7.15), we obtain
PRS,fail = 1 - ∑ ∑−
=
−−
=
12
0
12
0
min
min
d
e
ed
t
−−
−
−− teNtsymesym
ttsym
eesym PPPP
teN
eN
)1.(. ,,,, (7.16)
Equation (7.16) is a general equation for decoding failure probability of Reed-Solomon
code with statistically independent symbol assumption. It does not depend on the type of
the inner code or the channel. However, Psym,e and Psym,t found in step 1 and 2 are only for
randomly chosen inner codes in the simplified two-state fading channel.
7.1.3 A Note on Implementing the VSD Program
In VSD algorithm, Gauss-Jordan operation played an important role and this
function was called regularly in the program. It is used to discover null combinations and
to compute inverted matrices. Therefore, this function should run efficiently. To reduce
the number of computations of this function, consider that each entry in the matrix is
either 1 or 0 only. Therefore, the program is written to operate on the bit level. This is

106
done by representing each column of the matrix as a 32-bit word. Note that,, if a column
has more than 32 entries, but no more than 64 entries, it is represented by two 32-bit
words and so on. In Gauss-Jordan reduction with column operation, there are basically
two main computations, which are swapping the columns and adding two columns. For
our purpose, the addition is modulo-two addition and it is equivalent to an exclusive-OR
(XOR) operation. When the columns need to be swapped, the corresponding words are
swapped instead of swapping all entries of the two columns. Similarly, when two
columns are added, the program only needs to perform an XOR between the
corresponding words. For a matrix with 32 rows (32 entries for each column), this results
in performing XOR once instead of 32 times for each addition.
For a uniform random number generator, the function rand() in C++ is used when
it is sufficient for a particular part of the program. When this function is not sufficiently
random such as in the part to simulate the Gaussian noise channel or in the part to
simulate the Rayleigh fading channel, the uniform random number generator
recommended by [60] is used.
7.2 Results
Section 7.2.1 shows the comparison between the large vector union upper bound
decoding failure probability and the computer simulation result for 32-bit vector symbol.
The result is shown for a simplified two-state fading channel as an example. However,
this result is more general and does not really depend on the type of channel. The channel

107
is used only to give examples of values of the error statistics (p1 and p2). If another
channel gives the same value of error statistics, the result will be exactly the same. The
main point is to verify the results and see how good the upper bound is.
Section 7.2.2 shows the comparison between VSD and maximum distance code.
The maximum distance code is a non-interleaved Reed-Solomon code, which simply
means that the Reed-Solomon code uses the large vector symbol directly. In the
subsections, the results are shown for a convolutional inner code and a randomly chosen
inner code in two-state fading channel and a fast frequency-hopping system in channel
with interference. Other channels such as Gaussian noise channel and Rayleigh fading
with AWGN channel are considered with the interleaved-Reed-Solomon code in Chapter
8.
Section 7.2.3 shows the effect of vector symbol size on the performance of VSD
when the error statistics (p1 and p2) of the inner code are the same. As expected, VSD is
suitable for large vector symbol size such as a 24-bit or larger symbol.
7.2.1 Result of Large Vector Union Upper Bound Decoding Failure Probability
The recursive and the large vector union upper bound equations described in
Equation (6.9)-(6.13) are implemented in a computer program. Since this first approach
of evaluating the VSD performance only relates to the property of the outer code, the
inner code can be anything. It is only necessary to know the statistics of the inner code
decoding errors. For comparison purpose, the same inner code and the same inner code

108
decoder are used in both the recursive method and the computer simulated method. The
inner code is a (2,1,4) convolutional code with G(D) = [1+D+D4 1+D+D3+D4]. The
inner code decoder used List Viterbi Algorithm (LVA) decoding [18,19], with a list of 2
alternative choices. A simplified model of the independent fading channel was employed
such that when the channel was in a fade state, the received bit was an erasure. When the
channel was in a non-fade state, the received bit was assumed to be perfectly
demodulated. The statistic of the inner code decoding errors for this channel is shown in
Table 5.1a). The outer code is also the same for both approaches and it is a (3,2,2)
convolutional code with G(D) =
+++++
22
22
1111
DDDDDDD
Figure 7.1 shows that the large vector upper bound is very close to the simulation
result for this set of inner and outer code. It also shows that VSD with a list of two has a
very good performance. At the input symbol first choice error rate of 10.3% (p1 = 0.103),
the decoding failure probability of the whole block is 2.35 x 10-4. The terminated block
contains 21 outer symbols, where each symbol contains 32 bits. Therefore, it is a block of
672 bits. If the block length is longer the decoding failure probability will naturally be
increased.
As previously stated, large vector upper bound is based on the assumption that
each (vector) symbol contains a large number of bits such that the error symbols are
linearly independent. In almost all of computer simulations in this thesis, 24-bit symbols
and 32-bit symbols are used. It is highly unlikely for linear dependency to occur for 32-
bit symbols and none occurred in our simulations (more than 100 million trials, where
each trial is a randomly generated received block). For 24-bit symbols, this effect is also

109
negligible (within a few percent of the failure events from the same number of trials).
However, the computer-simulated result can have a noticeably higher decoding failure
probability than the large vector union upper bound when the symbols consist of a
smaller number of bits such as 16. This is expected since small symbol size violates the
assumption of the large vector upper bound. The effect of symbol size on the
performance of VSD is discussed in detail in Section 7.1.1 and a simulation result is
shown in Section 7.2.3.
7.2.2 Results of VSD in Comparison with the Non-Interleaved Reed-Solomon Code
For the comparison, the results of VSD are from computer simulations. The
simulation program was written in C++. There were basically two main parts in the
program: The inner decoder and the outer decoder. Various inner codes and their
appropriate decoders are used and the error statistics (p1 and p2) for each of them has
been shown in Chapter 5. The outer code is a terminated (3,2,2) convolutional code for
VSD and a (21,10) non-interleaved Reed-Solomon code for the maximum distance case.
Since VSD in this thesis can handle errors, but not erasures, it is usually assumed that the
inner decoder provides either error-free symbols or erroneous symbols, but not erasure
symbols, to both VSD and Reed-Solomon codes. For the random inner code in the two-
state fading channel, however, there are two different cases in consideration. The first
case is that the inner decoder provides no erasures to both VSD and Reed-Solomon code
as usually assumed. The second is that the inner decoder provides a mixture of errors and

110
erasures to Reed-Solomon codes, while it provides errors and no erasures for VSD. This
second case improves the performance of Reed-Solomon code.
7.2.2.1 A Convolutional Inner Code in a Simplified Two-State Fading Channel
For the inner decoder part, the information sequence was randomly generated and
then encoded using the structure of the inner code, which was the (2,1,4) convolutional
code with G(D) = [1+D+D4 1+D+D3+D4]. The transmitted code word was subject to the
channel condition. The simplified two-state independent fading channel described in
Section 4.1.1 is also assumed in this simulation. The inner decoder at the receiver
decoded each received sequence based on the List Viterbi Algorithm [18,19]. Note that,,
the decoded sequence that had at least one disagreeing bit from the received sequence
would be eliminated and would never be a survivor at the end of the trellis search. This is
due to the fact that the simplified channel is a pure bit erasure channel. This inner code
part was done for a range of channel condition. The inner code and channel are used
mainly to provide an example of p1 and p2. The result is shown in Table 5.1.
For the outer decoder part, we implemented the VSD algorithm. To minimize the
probability of dependent errors, 32-bit vector symbols is used and we also assume data
scrambling such that each bit in a symbol has the same probability of being a “1” or a
“0”. Since data scrambling is assumed, we can use p1 and p2 from Table 5.1 as input
parameters instead of inputting the actual decoded sequences from the inner decoder part.
The outer code is a simple (3,2,2) convolutional code with G(D) from Equation (3.37)

111
and H matrix from Equation (3.38) with 32-bit symbols. Note that,, the maximum
distance decoding does not need to use 32-bit symbols. It can use 5-bit symbols and
interleave 7 Reed-Solomon codes or 8-bit symbols and interleave 4 Reed-Solomon codes,
which give better results than the 32-bit case. The interleaved case will be considered
later. At this section, we assume that both maximum distance decoding and VSD use the
same 32-bit vector symbols.
A series of simulations show the comparison between VSD with lists of 2
alternative choices for the (3,2,2) convolutional outer code with the (21,10) maximum
distance decoding. Note that,, the curves for maximum distance decoding can be plotted
from its property and do not need a computer simulation. The two codes in comparison
provide the same symbol length and data rate. The outer symbols are assumed to be 32-
bit symbols for both cases. Given a range of Pera (probability of bit erasure for the two-
state fading channel), the error statistics (p1 and p2) of the symbols from the (2,1,4)
convolutional code with list Viterbi decoding were shown in Table 5.1. Using these error
statistics, the simulation results of VSD are discovered. It is seen from Figure 7.2 that the
decoding failure probability of VSD with this simple (3,2,2) convolutional outer code is
about two orders of magnitude lower than that of Reed-Solomon code. Figure 7.3 shows
the post-decoded symbol error probability given the same Pera, and therefore the same p1
and p2 as in Figure 7.2. The result is similar to the result of decoding failure probability in
Figure 7.2. The post-decoded symbol error probabilities of VSD result from computer
simulation. However, those of Reed-Solomon code are computed analytically from the
assumption that the Reed-Solomon code decoder does not make correction when the

112
number of errors is more than its correction capability. Figure 7.4 and Figure 7.5 show
the effect of the quality of the second choice by keeping p1 to a fixed value (0.1) and vary
the value of p2. It is seen from these two figures that the performance of VSD both in
terms of the decoding failure probability and the post-decoded symbol error probability is
better than the non-interleaved maximum distance code even without the second choice
(p2 = 1).
7.2.2.2 A Random Inner Code in a Simplified Two-State Fading Channel with 2
Cases of Reed-Solomon Code: Errors Only and a Mixture of Errors and
Erasures
The vector symbols are from a (72,32) randomly chosen inner code. The channel
is the simplified two-state independent fading channel. Since it is a randomly chosen
code, the structure of the inner code is unknown and its error statistics are computed
analytically as described in Section 4.2. Specifically, the error statistics of a (72,32)
randomly chosen code are shown in Section 5.4. Due to the assumption that data
scrambling is used, there is no problem in finding the performance of VSD since it can be
simulated with the error statistics of the inner codes only.
In this section, the Reed-Solomon outer code is used to handle a mixture of errors
and erasures as well as the “errors only” case. “Errors only” means that a received
symbol is either an error-free symbol or and erroneous symbol; there is no erasure
symbol. By allowing a mixture of errors and erasures, the performance of Reed-Solomon

113
code is improved because the effect of an error to an erasure for the Reed-Solomon code
is 2-to-1. That is one error has the same effect as two erasures in terms of correction
capability of Reed-Solomon codes. As discussed previously, the threshold for deciding
whether a symbol should be erased is generally not clear, but it is clear for the random
inner code in the two-state fading channel. This is because the number of possible code
words is known for a given rank of G matrix. In addition, the decoder is assumed to
select one code word randomly from all possible code words. Thus, the probability of
successful decoding for the inner decoder is known for each case and a symbol should be
erased if this probability is less than 1/2 since the effect of an error to an erasure is 2-to-1
for Reed-Solomon codes. Consequently, the performance of Reed-Solomon code with a
mixture of errors and erasures can be computed analytically as shown in Section 7.1.3.
For VSD, “errors only” case is used. For Reed-Solomon code, there are two cases.
One is the “error only” case and the other is the mixture of errors and erasures case. The
outer codes are still the (3,2,2) convolutional code with 21 outer symbols for VSD and
the (21,10) Reed-Solomon code as the maximum distance code. These two outer codes
contain the same number of data bits and encoded bits.
Figure 7.6 shows that the decoding failure probability of VSD is about a little less
than half an order of magnitude lower than that of the non-interleaved Reed-Solomon
code with a mixture of errors and erasures and one and a half order of magnitude lower
than that of the non-interleaved Reed-Solomon code with errors only. It is as expected
that the performance of the Reed-Solomon code when erasures are allowed is much better
than the “errors only” case. Note that,, Reed-Solomon code is allowed to use erasures for
114
its benefit, while VSD still use very short lists of two choices in the comparison.
Therefore, the performance of VSD can be improved further by using longer lists. In
addition, the performance of VSD is expected to improve if VSD is modified to handle a
mixture of errors and erasures. This is because erasure symbols provide more information
to the outer decoder than the error symbols; the positions of erasure symbols are known.
However, this modification of VSD requires further study.
Figure 7.7 shows that posted decoded symbol error probability of VSD is about
one and a half order of magnitude lower than that of non-interleaved Reed-Solomon
code, where both cases use errors only. The case that there are erasures in Reed-Solomon
code is not considered since the post-decoded symbol error probability has no meaning in
the mixture of errors and erasures case.
7.2.2.3 Fast Frequency-Hopping System in a Channel with Interference
The vector symbols are from the fast frequency-hopping spread spectrum system
described in Section 4.3.1 with 257 frequencies and selecting two frequencies at a time.
Since it is a spread spectrum system, the channel is assumed to have interference. The
interference can fill up the wrong row and it can cancel some chips in the correct rows
and make these chips appear empty (the signal power is smaller than some low
threshold). The cancellation is assumed to be possible only when there are exactly two
hits in a chips and the probability of two hits canceling each other is Pcancel.
115
For this system, each vector symbol consists of 15 bits. Due to the small vector
symbol size, the extra step of identifying some wrong recognition described in Section
7.1.1 is implemented for VSD. Since 15 is not a multiple of 8, the maximum distance
code (Reed-Solomon code) is assumed to operate on the 15-bit symbol directly. Note
that,, it is also possible to interleave 3 Reed-Solomon codes with 5-bit symbols for the
maximum distance code since the outer code length is ≤ 31. In the simulation, 60 users
are assumed to use the spread spectrum system at the same time. In addition, r is assumed
to be 9 chips/row. These parameters lead to the efficiency of 0.389105 in terms of
bits/chip, which is quite high. For maximum distance code, the symbol error probability
is assumed to be statistically independent and uniformly distributed on the received
symbols. Its decoding failure probability is the same as probability of having more than 5
error symbols in each block of the 21 received symbols and this is computed analytically.
Given Pcancel, p1 and p2 for 60 users and 9 chips/row are shown in Table 5.5 a).
Figure 7.8 shows that the decoding failure probability of VSD is considerably lower than
that of non-interleaved Reed-Solomon code for a long range of p1. The decoding failure
probability of the two is about the same at p1 = 0.033 and Reed-Solomon code has lower
decoding failure probability for p1 < 0.033. However, Figure 7.9 shows that the post-
decoded symbol error probability of VSD is still a little bit lower than that of Reed-
Solomon code at p1 = 0.0275. This is because a lot of failure events of VSD for 5-bit
symbols are due to the dependency and therefore the number of actual error symbols are
not large in these cases. This indicates that if a large vector size is used, the performance
will be much improved. On the other hand, if a Reed-Solomon code fails, the number of

116
error symbols must be higher than its correction capability. Therefore, VSD has a better
post-decoded symbol error probability than the Reed-Solomon code from the range of p1
that is about 0.0275 or higher. The reason that the performance of VSD is not as good as
in other conditions is due to two factors. The first one is that 15-bit symbols are very
small for VSD. The second one is that only lists of two alternative choices are allowed
and p2 is very high for this system (see Table 5.5). If lists of three choices and larger
symbol size are used for frequency hopping system, the performance of VSD should be
much better since the probability that the correct code word is not in the first three
choices is very small for this type of system (see Table 5.5). If the symbol size is fixed at
15-bit, it may not worth the complexity to use lists of three choices because longer lists
mean more failure events due to wrong recognitions. Since it is not practical for the
frequency-hopping system in consideration to provide 24 or more bits per symbol, the
result is shown for the lists of two choices only.
Note that,, if lists of different size are allowed for different vector symbol, some
vector symbols may need only a list of one choice for this system. This is because some
errors are caused by ties (many frequencies have the same number of hits). If there is no
tie for a particular vector symbol, that symbol may use only a list of one choice.
7.2.3 Results on the effect of symbol size on VSD
In these simulations, three different symbol sizes are used: 16-bit symbol, 24-bit
symbol and 32-bit symbol. Different symbol size results in a different set of error

117
statistics (p1 and p2). However, the error statistics also depend on the structure of the
inner code. To show only the effect of dependent errors and the use of list decoding, the
same set of error statistics is used for all symbol sizes. Note that,, the dependent error
symbols refer to the dependency between the first choices of different symbols. However,
the error due to the use of list decoding is caused by wrong recognition due to the
dependency of the rows in the modified syndrome matrix S’. In the simulation, the error
statistics (p1 and p2) of 32-bit symbol from the (2,1,4) convolutional inner code in the
two-state independent fading channel is used. If there is no additional error due to the
dependent error symbols and the use of list decoding, the decoding failure probability
should be the same for the same input error statistics. As a result, the simulation provides
insight as to the validity of the linear independence assumption. Figure 7.10 shows the
performance of VSD in terms of decoding failure probability for three different symbol
sizes with the same set of p1 and p2. For 16-bit symbols, two cases are shown. One uses
the 16-bit symbols with the same VSD algorithm as in the larger vector symbol size.
Another one uses the 16-bit symbols with a modified VSD algorithm, which includes an
extra step to reduce decoding failure due to wrong recognitions. The detail of this extra
step was described in 7.1.1.
For the 32-bit symbol case, no decoding failure due to either dependent errors or
the use of list decoding was found to occur in 5 – 25 million trials for each simulation
point (for a total of more than 100 million trials). For the 24-bit symbol case, there is
negligible decoding failure probability due to both sources of errors. Specifically, the
effect of both wrong recognition and the dependent errors is within a few percent from 5

118
– 25 millions trials for each simulation point. For the 16-bit symbol case, however, there
are a lot of additional failure events as seen in Figure 7.10. If the extra step in reducing
the wrong recognitions is implemented for the 16-bit symbol case, the failure events due
to the wrong recognitions will be reduced, but the failure events due to dependent errors
are the same. It is seen that the 16-bit symbol with extra step has a better performance
than the one without the extra step.
The differences on the performance of VSD between 16-bit symbols and 24-bit or
32-bit symbols increase when the symbol error probability decreases. This is because for
small symbol error probability, the decoding failure events for large vector symbol are
rare and thus the effect of dependent errors and wrong recognitions is more significant.

119
Figure 7.1 Comparison between the upper bound and the computer simulated performance of 32-bit symbol VSD
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
0.05 0.06 0.07 0.08 0.09 0.1 0.11 0.12 0.13 0.14
Input symbol error probability of the first choice (p1)
Dec
odin
g fa
ilure
pro
babi
lity
simulated VSD upperbound VSD

120
Figure 7.2 Decoding failure probability of VSD and Non-interleaved Reed-Solomon code (32-bit symbols, convolutional inner
code, 2-state fading channel)
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0.360 0.365 0.370 0.375 0.380 0.385 0.390 0.395 0.400 0.405 0.410
Probability of bit erasure for the two-state fading channel (Pera)
Dec
odin
g fa
ilure
pro
babi
lity
Reed-Solomon codeVSD

121
Figure 7.3 Post-decoded symbol error probability of VSD and Non-interleaved Reed-Solomon code (32-bit symbols,
convolutional inner code, 2-state fading channel)
1.00E-07
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0.360 0.365 0.370 0.375 0.380 0.385 0.390 0.395 0.400 0.405 0.410
Probability of bit erasure for the two-state fading channel (Pera)
Post
-dec
odin
g sy
mbo
l erro
r pro
babi
lity
Reed-Solomon codeVSD
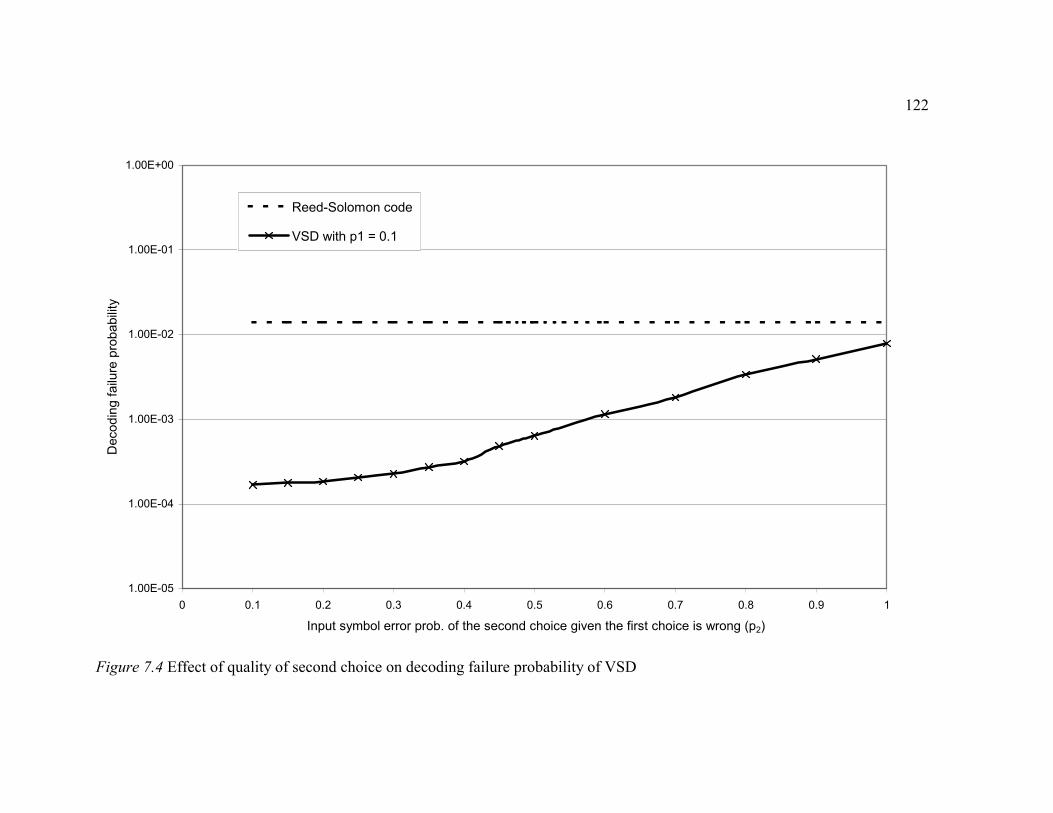
122
Figure 7.4 Effect of quality of second choice on decoding failure probability of VSD
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Input symbol error prob. of the second choice given the first choice is wrong (p2)
Dec
odin
g fa
ilure
pro
babi
lity
Reed-Solomon code
VSD with p1 = 0.1

123
Figure 7.5 Effect of quality of second choice on post-decoded symbol error probability of VSD
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1Input symbol error prob. of the second choice given the first choice is wrong (p2)
Post
-dec
oded
sym
bol e
rror p
roba
bilit
y Reed-Solomon codeVSD with p1 = 0.1

124
Figure 7.6 Decoding failure probability of VSD and Non-interleaved Reed-Solomon code with errors only and a mixture of errors
and erasures (32-bit symbols, random inner code,2-state fading channel)
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0.445 0.45 0.455 0.46 0.465 0.47 0.475 0.48 0.485 0.49 0.495
Probability of bit erasure for the two-state fading channel (Pera)
Dec
odin
g fa
ilure
pro
babi
lity
Reed-Solomon code(errors only)Reed-Solomon code(errors & erasures)VSD

125
Figure 7.7 Post-decoded symbol error probability of VSD and Non-interleaved Reed-Solomon code (32-bit symbols, random
inner code, 2-state fading channel)
1.00E-07
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0.445 0.45 0.455 0.46 0.465 0.47 0.475 0.48 0.485 0.49 0.495
Probability of bit erasure for the two-state fading channel (Pera)
Post
-dec
oded
sym
bol e
rror p
roba
bilit
y
Reed-Solomon code(errors only)
VSD

126
Figure 7.8 Decoding failure probability of VSD and Non-interleaved Reed-Solomon code (15-bit symbols, frequency-hopping, 60
users, 9 chips/row, efficiency = 0.389)
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0.02 0.04 0.06 0.08 0.1 0.12 0.14Input symbol error probability of the first choice (p1)
Dec
odin
g fa
ilure
pro
babi
lity
Reed-Solomon codeVSD

127
Figure 7.9 Post-decoded sytmbol error probability of VSD and Non-interleaved Reed-Solomon code (15-bit symbols, frequency-
hopping, 60 users, 9 chips/row, efficiency = 0.389)
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0.02 0.04 0.06 0.08 0.1 0.12 0.14
Input symbol error probability of the first choice (p1)
Post
-dec
oded
sym
bol e
rror p
roba
bilit
y
Reed-Solomon codeVSD

128
Figure 7.10 Effect of vector symbol size on the decoding failure probability of VSD
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.11 0.12 0.13 0.14
Input symbol error probability of the first choice (p1)
Dec
odin
g fa
ilure
pro
babi
lity
32-bit symbol
24-bit symbol
16-bit symbol
16-bit symbol withextra step

Chapter 8
INTERLEAVED REED-SOLOMON CODES
To minimize the likelihood of dependent errors for VSD, the vector symbols
should consist of at least 24 or 32 bits as seen in section 7.2.3. The symbol size restriction
of VSD leads to difficulty in comparing the performance of VSD with Reed-Solomon
codes. With the assumption of 32-bit symbols, the performance of VSD is shown to be
much better than Reed-Solomon code of the same number of bits. However Reed-
Solomon codes usually use fewer bits such as 8 bits per symbol. To handle a larger size
symbol, the common practice is to interleave many Reed-Solomon codes. Kasami
showed an example of interleaving 9 Reed-Solomon codes to achieve 72-bit symbols in
[23] and 5 Reed-Solomon codes to achieve 40 bit symbols in [24]. Jensen and Passke also
used interleaved Reed-Solomon code with inner sequential decoding in [25]. For a large
symbol size, VSD becomes more and more attractive since it can handle 32 or more
bits/symbol easily. Interleaving does improve the performance of Reed-Solomon code for
large symbol size. Therefore, to make the comparison between VSD and Reed-Solomon
codes fairer, interleaved Reed-Solomon codes are considered in this chapter.
In the comparison, when the inner code provides 24-bit symbols, VSD will use
24-bit symbols directly. However Reed-Solomon code will break the 24-bit symbols into
smaller size such as three 8-bit subblocks/symbol. Then three Reed-Solomon codes are
combined, each of which handles 8-bit subblocks (or 8-bit symbols since each of the
three codes will consider each 8-bit subblock as a symbol). As a result, the relationship

130
between the symbol probabilities of the large vector symbol (e.g., 24-bit) and the small
subblocks (e.g., 8-bit) is of interest. Unfortunately, there is no general rule for this
relationship. Given a different code, the relationship between different symbol sizes in
terms of symbol error probability can be totally different.
In general, powerful inner codes have high minimum distance and are designed to
correct a large number of errors. When their decoders make a wrong decision, which
means that they decide that the received block corresponds to a wrong codeword, they
tend to leave many data errors in all or most parts of the decoded block. This is because
each code word has a minimum distance that they differ from each other. For a block
code with minimum distance dmin, a wrong decision will lead to at least dmin error bits in
the code word. Since the code word consists of both data and check bits, some of the
error bits may be check bits and will be disregarded at the outer code decoder. Therefore,
the number of data bits in error and the positions of the errors still depend on the structure
of the code. However, the idea of dmin suggests that the symbol selected from double the
number of bits should have less than double the symbol error probability. The results in
this chapter show that this is true for the three different inner codes in consideration.
One effect of interleaving many Reed-Solomon codes, where each of them handle
subblocks, is that all codes must be successful in order for the received sequence to be
successfully decoded. This means that the effective block error probability for the total
interleaved Reed-Solomon code is higher than for an 8-bit-symbol individual code part
by some factor that is more than 1. This factor depends on the correlation of errors among

131
subblocks, which in turn depends both on the structure of inner codes and the degree of
burstiness of the channel.
8.1 Examples of Relationship between the Symbol Error Probabilities of the Vector
Symbols and their Subblocks
The relationship between the symbol error probabilities of the vector symbols and
their subblocks depends highly on the structure of the inner code. Therefore, we do not
attempt to generalize the results, but to give some examples of what they are.
In Table 8.1-8.3, the inner code is a (2,1,4) convolutional inner code with G(D) =
[1+D+D4 1+D+D3+D4] and dfree = 5. The channels are simplified two-state fading
channel, AWGN channel and Rayleigh fading with AWGN channel. It is seen from these
tables that the ratio of symbol error probability of 24-bit symbols and that of 8-bit
symbols (or subblocks) is much lower than the ratio of the number of bits between the
two symbol sizes. Specifically, the ratio of the number of bits is 24/8 = 3 and if only one
subblock is always wrong when the whole 24-bit symbol is wrong, the ratio of the
symbol error probability should be 3 too. However, the ratio of the symbol error
probability is about 1.8 – 2, which is much lower than 3 at least in the range of interest.
This means that when the 24-bit symbol is wrong, more than one subblock are often
wrong too. The results from these three tables will be used in the simulations in Section
8.2.
132
In addition to the (2,1,4) convolutional code that will be used in later simulations,
two other inner codes are considered as examples. One is a (31,16) three-error-correcting
BCH code, which is a block inner code. It is assumed that the channel is a binary
symmetric channel as shown in Figure 8.1 and that the error bits are statistically
independent. In this case, the vector symbol size consists of 16 bits instead of 24 bits, but
each subblock is still an 8-bit subblock. Table 8.2 shows that the ratio between the
symbol error probabilities of 16-bit symbols and that of 8-bit symbols (or subblocks) is
up to about 1.24, which is much lower than the ratio of the number of bits (16/8 = 2).
Again, this means that when the 16-bit symbol is wrong, both of the 8-bit subblocks are
also wrong most of the time.
0 0
1 1
Figure 8.1 The binary symmetric channel with probability pe that a received bit is
erroneous.
The other code is a (2,1,5) convolutional code with G(D) = [1+D+D3+D5 1+
D2+D3+D5] and dfree = 8. The channel is also assumed to be a binary symmetric channel
with statistically independent error bits. In this case, three different vector symbol sizes
are considered since convolutional codes are much more flexible than BCH code in terms
of the length of data bits for each symbol. Note that,, the different symbol size comes
from terminating the convolutional code at different length. The three vector symbol
pe
pe
1-pe
1-pe

133
sizes are 16, 24 and 32 bits. Each of them is broken up into two, three and four 8-bit
subblocks/symbol, respectively. Table 8.3 shows the results for the three symbol sizes.
Similar to the results of the two previous codes, the ratio between the symbol error
probability of the large vector symbols (16, 24 or 32 bits) and that of the 8-bit subblocks
are much smaller than the ratio of the number of bits (2,3 and 4 respectively).
Table 8.1 Comparison of symbol error probability for 8-bit subblock and 24-bit symbol
using a (2,1,4) convolutional code with dfree = 5
a) in two-state fading channel.
Pera
Symbol error
probability (8 bit)
Symbol error
probability (24 bit) Ratio of 24 bit/ 8bit
0.380 0.0292 0.0589 2.0136
0.385 0.0325 0.0650 1.9975
0.390 0.0361 0.0716 1.9823
0.395 0.0399 0.0786 1.9821
0.400 0.0440 0.0859 1.9674
0.405 0.0485 0.0940 1.9364
0.410 0.0533 0.1025 1.9223
0.415 0.0588 0.1121 1.9061
0.420 0.0645 0.1220 1.8902

134
Table 8.1 b) in AWGN channel.
Eb/No (dB)
Symbol error
probability (8 bit)
Symbol error
probability (24 bit) Ratio of 24 bit/ 8bit
1.8 0.0624 0.1153 1.8491
1.9 0.0556 0.1038 1.8669
2.0 0.0493 0.0930 1.8853
2.1 0.0436 0.0829 1.9026
2.2 0.0384 0.0736 1.9201
2.3 0.0336 0.0652 1.9378
2.4 0.0294 0.0576 1.9584
2.5 0.0256 0.0506 1.9771
2.6 0.0222 0.0442 1.9943
2.7 0.0191 0.0385 2.0159
Table 8.1 c) in Rayleigh fading with AWGN channel.
Average received
power in dB
(10logR2*Eb)
Symbol error
probability (8 bit)
Symbol error
probability (24 bit) Ratio of 24 bit/ 8bit
6.0746 0.1238 0.2140 1.7280
6.5442 0.0807 0.1450 1.7968
6.7251 0.0676 0.1233 1.8245
6.9897 0.0516 0.0962 1.8645
7.2464 0.0392 0.0746 1.9039
7.4135 0.0325 0.0627 1.9281
7.5774 0.0269 0.0526 1.9548
7.8176 0.0203 0.0404 1.9854

135
Table 8.2 Comparison of symbol error probability for 8-bit subblock and 16-bit symbol
using the (31,16) three-error-correcting BCH code in binary symmetric channel.
Bit error
probability
Symbol error
probability (8 bit)
Symbol error
probability (16 bit)
Ratio of 16 bit/
8bit
0.050 0.0721 0.0814 1.1290
0.060 0.0750 0.0930 1.2400
0.070 0.1315 0.1630 1.2395
0.080 0.1770 0.2100 1.1864
0.090 0.2543 0.2929 1.1518
0.100 0.3130 0.3620 1.1565
0.125 0.4710 0.5540 1.1762
0.150 0.6080 0.7040 1.1579
0.175 0.7360 0.8140 1.1060
0.200 0.8220 0.9240 1.1241

136
Table 8.3 Comparison of symbol error probability using a (2,1,5) convolutional code with
dfree = 8 in binary symmetric channel.
a) 8-bit subblock and 16-bit symbol
Bit error
probability
Symbol error
probability (8 bit)
Symbol error
probability (16 bit) Ratio of 16 bit/ 8bit
0.050 0.0042 0.0054 1.2689
0.060 0.0073 0.0093 1.2740
0.070 0.0120 0.0170 1.4167
0.080 0.0225 0.0320 1.4222
0.090 0.0470 0.0600 1.2766
0.100 0.0585 0.0750 1.2821
0.125 0.1240 0.1600 1.2903
0.150 0.2030 0.2540 1.2512
0.175 0.3270 0.4020 1.2294
0.200 0.4770 0.5780 1.2117
0.225 0.5800 0.6840 1.1793

137
Table 8.3 b) 8-bit subblock and 24-bit symbol
Bit error
probability
Symbol error
probability (8 bit)
Symbol error
probability (24 bit) Ratio of 24 bit/ 8bit
0.060 0.0110 0.0197 1.791
0.065 0.0162 0.0263 1.623
0.070 0.0217 0.0360 1.659
0.075 0.0267 0.0448 1.678
0.080 0.0436 0.0720 1.651
0.085 0.0439 0.0732 1.667
0.090 0.0578 0.0995 1.721
0.095 0.0716 0.1180 1.648
0.100 0.0845 0.1340 1.586
0.150 0.3280 0.4800 1.463
0.200 0.5964 0.7873 1.320

138
Table 8.3 c) 8-bit subblock and 32-bit symbol
Bit error
probability
Symbol error
probability (8 bit)
Symbol error
probability (32 bit) Ratio of 32 bit/ 8bit
0.060 0.0125 0.0280 2.240
0.065 0.0184 0.0400 2.174
0.070 0.0249 0.0540 2.169
0.075 0.0350 0.0732 2.091
0.080 0.0460 0.0970 2.109
0.085 0.0602 0.1195 1.985
0.090 0.0720 0.1400 1.944
0.095 0.0904 0.1730 1.914
0.100 0.1145 0.2100 1.834
0.150 0.3910 0.6020 1.540
0.200 0.6700 0.9040 1.349

139
8.2 Results of VSD in Comparison with the Interleaved Reed-Solomon Code
The simulations will be done for a convolutional inner code in three different
channels. They are not done for the randomly chosen inner code because the relationship
between vector symbols and their subblocks depends highly on the structure of the inner
code. Since the structure of the inner code is unknown for randomly chosen inner codes,
the decoding failure probability of interleaved Reed-Solomon code cannot be computed
accurately.
8.2.1 A Convolutional Inner Code in a Simplified Two-State Fading Channel
In this case, the channel is the simplified two-state fading channel where the
received bit is either error-free or erased. The maximum distance code is constructed
from interleaving many Reed-Solomon codes instead of using only one Reed-Solomon
code with a large vector symbol size directly as done in Chapter 7. VSD uses a
terminated (3,2,2) convolutional outer code with G(D) from Equation (3.37) and H
matrix from Equation (3.38). The lists of two alternative choices are assumed and these
lists result from LVA. In addition, there are 21 vector symbols for each received block
and the symbols are 24-bit symbols. The inner code is a terminated (2,1,4) convolutional
code with G(D) = [1+D+D4 1+D+D3+D4] and dfree = 5. Each inner code sequence is
terminated at 24 data bits to provide a 24-bit vector symbol to the outer code. For the
maximum distance code, three (21,10) Reed-Solomon codes with 8-bit symbols are
interleaved to achieve the 24-bit symbol requirement for the comparison. Since the

140
decoding of the overall maximum distance code fails when at least one of the interleaved
codes fails, the decoding failure is discovered from the simulations too. Figure 8.2 shows
that the decoding failure probability of VSD is still almost an order of magnitude lower
than that of the maximum distance code, which has the same total number of bits. Since
VSD uses 24-bit symbols, while each of the three Reed-Solomon codes uses 8-bit
symbols, the post-decoded symbol error probability is misleading and not shown.
8.2.2 A Convolutional Inner Code in an AWGN Channel
The vector symbols are from the same (2,1,4) terminated convolutional inner code
with 24 data bits per block. The channel is an additive white Gaussian noise (AWGN)
channel, instead of the simplified two-state independent fading channel. Consequently,
the inner decoder is LVA with list of two, where its metric for soft decision decoding is
as described in Section 4.1.2. For the outer code, VSD with the same (3,2,2)
convolutional code and 21 outer symbols is compared with the interleaved Reed-
Solomon code, which consists of three 8-bit-symbol (21,10) Reed-Solomon codes. Figure
8.3 shows that given the same received Eb/No, the decoding failure probability of VSD is
about half an order of magnitude lower than that of Reed-Solomon code in this case.

141
8.2.3 A Convolutional Inner Code in a Rayleigh Fading with AWGN Channel
The assumptions in this case are exactly the same as in the previous case except
that the channel is a Rayleigh fading with AWGN channel instead of simply an AWGN
channel. The fading is assumed to be independent for each bit and follows the Rayleigh
distribution, which can result from interleaving a long sequence of bits. The metric for
this present channel is described in Section 4.1.3. The inner code and the outer codes are
the same as in the previous section. Figure 8.4 shows that given the same average
received power, the decoding failure probability of Reed-Solomon code is more than
twice that of VSD at average received power of 7.81 dB and it is more than six times that
of the VSD at the average received power of 6.73 dB. Note that,, the average received
power is 10log(R2*Eb) where R is the Rayleigh parameter and Eb is the energy per bit.

142
Figure 8.2 Decoding failure probability of VSD (24-bit symbols) and Interleaved Reed-Solomon code (8-bit subblocks), 2-state
fading channel.
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
0.375 0.38 0.385 0.39 0.395 0.4 0.405 0.41 0.415 0.42 0.425
Probability of bit erasure for the two-state fading channel (Pera)
Dec
odin
g fa
ilure
pro
babi
lity
Reed-Solomon codeVSD

143
Figure 8.3 Decoding failure probability of VSD (24-bit symbols) and Interleaved Reed-Solomon code (8-bit subblocks), AWGN
channel.
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.5 1.7 1.9 2.1 2.3 2.5 2.7 2.9
Eb/No (dB)
Dec
odin
g fa
ilure
pro
babi
lity.
Reed-Solomon codeVSD

144
Figure 8.4 Decoding failure probability of VSD (24-bit symbols) and Interleaved Reed-Solomon code (8-bit subblocks), Rayleigh
fading with AWGN channel
1.00E-07
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
5.5 6 6.5 7 7.5 8
Average received power in dB
Dec
odin
g fa
ilure
pro
babi
lity
Reed-Solomon codeVSD

Chapter 9
METHOD & RESULTS ON PERFORMANCE OF VSD FOR FIRST
INFORMATION BLOCK (FIB)
In addition to the large vector upper bound on the decoding failure probability in
chapter 6, the weight distribution can be used to gain some insight on the number of
syndromes needed for each successful decoding of the first information block. This gives
a very rough estimate of the complexity of the decoder. As described in Section 3.2, FIB
is a block of received symbol sequence that starts with the first yet undecoded received
symbol. The more syndromes the decoder is using, the longer the block of FIB.
To consider FIB instead of a terminated convolutional code in the case of the
large vector union upper bound, the received sequence is assumed to be infinite. In other
words, more received symbols are always available if they are needed for the decoding.
However, the maximum number of syndromes used is limited to sixteen for the
simulations. Even though the idea of the weight structure is similar to the one used on
section 6.1 to find the large vector union upper bound, the different assumptions make it
necessary to redefine some of the parameters. For clarity, the definitions for this section
is presented as follows:

146
Assumption: The error symbols are linearly independent. Each symbol is independent
identically distributed with probability of error p1 and p2 for the first and second choice
symbols respectively.
Define:
p1 = symbol error probability of the first choice. (q1 = 1- p1)
p2 = symbol error probability of the second choice given that the first choice is wrong.(q2
= 1-p2)
t = index of the interval on the trellis diagram which equals to the number of
syndromes used for decoding at that interval.
Note: The interval t starts at the first departure from zero of the trellis diagram.
Ft = probability of failure at the end of t intervals due to error symbol completely
covering or one position away from covering (without any correct second choice)
a binary code word that starts with non zero path in the trellis diagram (i.e., the
first two positions of the symbol sequence that we are trying to correct are non
zero.)
Ft np
= the same as Ft except we assume that the decoder does not recognize any pair of
error symbols that have incorrect first choices and correct second choices. (This
idea will be discussed more when Ft np is computed.)
tNs(w) = number of code word paths of weight w at state s and at the end of interval t.
tN’(w) = Σs[tNs(w)] = Total number of code word path of weight w at the end of interval
t. Note that,, this tN’(w) is different from tN(w) since the code is not terminated.

147
tPsynd = Probability of failure to decode the first information block using a maximum of
t syndromes.
To demonstrate this recursive method, a (2,1,2) convolutional code with G(D) =
[1+D2,1+D+D2] will be used as an example. The method can be extended to other
convolutional codes with some modifications. However, it is not important to extend this.
The purpose of this method is to gain some insight in the number of syndromes needed
for each successful decoding of a FIB. To find the performance of VSD in terms of the
decoding failure probability, the large vector upper bound or the computer simulation are
more appropriate. There are mainly 3 steps for this method as follows:
9.1 Compute tNs(w) and tN’(w) (the Weight Structure):
The tNs(w) equations were discovered in section 6.1. For convenience, the equations
are repeated here.
For this (2,1,2) code, the recursive functions for finding tNs(w) are, (for t > 1):
tN0(w) = t-1N1(w-2) + t-1N0(w); t > 1 (9.1)
tN1(w) = t-1N2(w-1) + t-1N3(w-1); t > 1 (9.2)
tN2(w) = t-1N1(w); t > 1 (9.3)
tN3(w) = t-1N3(w-1) + t-1N2(w-1); t > 1 (9.4)
For t = 1, there is only one binary codeword of weight two.

148
Note that,, the term t-1N0(w-2) is omitted from equation (9.3) because once the path goes
back to state 0, all continuing paths are included in the computation of Ft and Ft np
.
Then, tN’(w) is computed from Σs[tNs(w)].
9.2 Find Union Upper Bound on Ft and Ft np
:
Using equation (9.5) and (9.6) as follows:
Ft ≤ (p1p2)2{Min(1, Σw [tN’(w)*( p1w-2 + (w-2)q1(p1p2)w-3)]}
+ 2q1p1p2{Min(1, Σw[tN’(w)*( p1p2)w-2)]}
+ 2p12q2p2{Min(1, Σw[tN’(w)* p1
w-2)]}; t = 1,2,3… (9.5)
Ft np
≤ Ft + (p1q2)2*{Min(1, Σw[tN’(w)* p1 w-2)]}; t = 1,2,3… (9.6)
The first term in equation (9.5) is for the case that the two received symbols in the
first interval has both choices wrong (p1p2)2. The term p1w-2 means that the rest of the
“1’s” positions also have first choices wrong. The term q1(p1p2)w-3 means that in the rest
of the “1’s” positions, there is one correct first choice, while other “1’s” positions have
all first and second choices wrong. The one correct first choice can be in any of the (w-2)
position, so this term is multiplied by (w-2). The second term in (9.5) is for the case that
one of the two received symbols has correct first choice while the other has both choices
wrong (q1p1p2). There are two ways this can happen, so it is multiplied by two. The term

149
(p1p2)w-2 means that the rest of the “1’s” positions have both first and second choice
wrong. The third term in (9.5) is for the case that one of the two received symbols has
both choices wrong while the other has incorrect first choice and correct second choice
(p12q2p2). There are two ways this can happen, so it is multiplied by two.
The additional term in equation (9.6) is for the case that the two received symbols
have incorrect first choices and correct second choices. This additional term is included
in Ft np, but not in Ft because this term is considered as a failure event except in the first
interval. The distinction should become clear when tPsynd is computed. For the first
interval, we can correct this pair by using only one syndrome. To demonstrate this, let the
error matrix E = [e1’ e2’]T. With one syndrome case, the (binary) H matrix = [1 1] and the
syndrome matrix S = [e1’+ e2’]. Append the differences of the two choices and also the
sum of the differences (done only for the one syndrome case). The new syndrome matrix
is S’ = [(e1’+ e2’) e1’ e2’ (e1’+ e2’)]T. The decoder will recognize the duplication of the
first and the last element and the true errors are readily revealed as e1’ and e2’.
Additional note on equation (9.5) and (9.6):
a) Min (1, a) is included because all the terms that correspond to “a” in equation (9.5)
and (9.6) are probabilities and thus, they cannot exceed 1.
b) Equation (9.5) and (9.6) give exact results for t = 1 case.
c) To speed up the computation, the limit of the summations goes from w = 3 to w = 2t.
(The minimum weight is 3 when t >1 for this code and in general, the weight cannot
go beyond the number of outputs times the number of intervals.)

150
9.3 Find tPsynd (Probability of Failure to Decode FIB Using a Maximum of t
Syndromes):
We use union bound to find this probability. The decoder that can use a maximum
of t syndromes will fail if
1) The code words that depart the trellis at t = 0 (i.e., the beginning of the first interval)
are covered or one position away from being covered by error symbols without any
correct second choice. The corresponding probability is Ft.
2) The code words that depart the trellis at the end of interval t = 1,2,3,… are completely
covered or one position away from covered by error symbols without any correct
second choice. Since they depart at a later interval, the associated probability is Ft-i np
where i indicates the interval that the code words depart. In addition, a particular Ft-i np
is taken into account only when the decoder fails with i syndromes.
Therefore, tPsynd can be found by:
tPsynd ≤ Ft + 1Psynd *(Ft-1 np) + 2Psynd *(Ft-2
np) + … + t-1Psynd *(F1 np) (9.7)
9.4 Expected Number of Syndromes Used in Decoding FIB:
This can be calculated as follows:
E{# of syndromes used}
= { ∑−
=
⋅1maxt
1tt P(success with exactly t syndromes) }+ tmax P(success with at least tmax
syndromes)

151
= { ∑−
=
⋅1maxt
1tt [P(success with maximum of t syndromes) - P(success with maximum of t-1
syndromes)]} + tmax P(failure with maximum tmax –1 syndromes)
= { ∑−
=
⋅1maxt
1tt [(1 - tPsynd) – (1 - t-1Psynd)]} + tmax (tmax-1Psynd)
= { ∑−
=
⋅1maxt
1tt [ t-1Psynd - tPsynd] } + tmax (tmax-1Psynd) (9.8)
where tmax = maximum number of syndromes that the decoder will use.
9.5 Complexity of VSD with Maximum of tmax Syndromes:
To be very conservative, we assume that this complexity (relative to the one
syndrome case) is the cube of the number of syndromes used. The cubic rise is assumed
because the error values can generally be evaluated by inverting a matrix with dimension
less than the number of syndromes used. However, this is pessimistic because we can
often do simple forward substitution to find error values and the matrix inversion is not
needed [17] In addition, the matrix is binary, and each XOR operation can be used on a
word, which consists of many bits such as 32-bit word, instead of on each bit. This idea
was described in section 7.1.3. Therefore, even if the matrix inversion is necessary, the
cubic rise is still pessimistic. Based on the cubic rise assumption and Equation (9.8), we
obtain

152
Complexity (relative to one syndrome case)
≤ { ∑−
=
1maxt
1t
3t [ t-1Psynd - tPsynd] } + tmax3 (tmax-1Psynd) (9.9)
9.6 Complexity Comparison between VSD and RS Decoder
The complexity of VSD is comparable to that of an RS decoder. To show this, the
complexity in terms of the number of computations per decoded bit (suggested by
Metzner) is considered for both decoders. For an RS decoder, we assume the fast
generalized-minimum distance decoding proposed by Sorger [61]. This decoder uses a
modified Berlekamp-Massey algorithm [12,62]. The optimal asymptotic generalized-
minimum distance decoding complexity is O (d*N), where N is the number of outer
symbols and d is the distance of the code [61]. This complexity is counted as the number
of multiplications in the field [63]. For each field multiplication, suppose the dual basis
multiplication algorithm by Berlekamp [64] is used. The complexity of this multiplier is
O(r), where the Reed-Solomon code is over GF(2r), since the realization circuit requires
O(r) gates [13]. Notice that whether the Reed-Solomon code is interleaved or not, the
complexity is still of the same order with this multiplication technique. There are r*K
decoded bits per each received sequence for an (N,K) Reed-Solomon code. Therefore, the
complexity of the RS decoder in terms of the number of computations per decoded bit is
roughly O((d*N*r)/(r*K)), which is O(d*N/K) for the RS decoder.
For VSD, assume that the (2,1,2) convolutional code is used and it is terminated
to have N outer symbols and K data symbols. Note that,, a Reed-Solomon code can be

153
shortened or punctured so that it has the same data length and data rate as this terminated
convolutional code. Suppose N is 32, and then K will be 14. Assume that the
convolutional VSD uses x = 16 syndromes immediately without trying fewer number of
syndromes first. This makes the convolutional VSD similar to block VSD. It also
increases the complexity of convolutional VSD, but it will make the comparison simpler.
Since H is a binary matrix, a row or a column of H can be represented by one or a few
words. In the C++ programming used in this thesis, a word contains 32 bits. Then bitwise
XOR can be used to perform a column or a row operation. The following estimate of the
complexity is a rough estimate. Only the main steps that need most computations are
considered. These steps are the one that requires Gauss-Jordan operation. Suppose N =
32, K = 14 and number of syndromes = 16. Note that,, these numbers are used to make
the explanation clearer. Even if these parameters are changed, the order of the complexity
will be the same. We use the notations from Section 3.1 and 3.2.
1) Gauss-Jordan operation is performed to
a) Discover whether any appended row is in the row space of S. The Gauss-Jordan
operation is performed on the modified syndrome matrix S’. Since there are 16
syndromes and it is a rate ½ convolutional code with lists of two, there are 48
rows in S’ (including the appended rows). Each column can then be presented by
two 32-bit words and at most 2r computations for each row are needed for at most
x rows, where x is the number of syndromes (x = 16). The factor of 2 comes from
the fact that each operation needs to works on two words. For larger lists or larger
number of syndromes (x > 21 with lists of two), the factor will be higher

154
depending on the number of words needed to represented one column. The
operations are basically interchanging two columns or performing bitwise XOR
between two columns. Thus, there are at most 2*r*x computations for r*K
decoded bits for the Gauss-Jordan in this step. The number of computations per
decoded bit is approximately 2*x/K for this step. For rate ½ code, this is
2*(N/2)/K = N/K. For other rate, the number of computations per decoded bit will
be some factor times N/K.
b) The error-locating vector is the “OR” of the linearly independent null
combinations. The null combinations are discovered by performing Gauss-Jordan
reduction on S”, which contains x rows. With x = 16, each column can be
represented by a word. This step adds an additional x/K computations/decoded
bit.
c) Invert Hsub matrix to find error values. With e error symbols, this binary matrix
has a dimension of e by e. This adds another e/K computations per decoded bit.
2) Suppose that data scrambling is necessary. Assume that the transformations for
different vector symbols in data scrambling technique are multiplications of different
field elements. Then, there are N field multiplications. Each of them can be realized by
dual basis multiplication algorithm with the complexity of O(r). The number of decoded
bits are still r*K. Thus, the number of computations per decoded bit for this step is in the
order of (N*r)/(r*K) = N/K.
Therefore, the estimate number of computations per decoded bit for VSD is the
order of 2*x/K + x/K + e/K + N/K, which means that the complexity is O(N/K) since the

155
number of syndromes x is N/2 for rate ½ code and e is much less than N. This complexity
is in terms of the number of computations per decoded bit. Recall that the number of
computations per decoded bit for RS decoder is O(d*N/K). As a result, VSD has roughly
comparable complexity as the RS decoder.
9.7 Results of Decoding Failure Probability for FIB
The results are for the (2,1,2) convolutional outer code with 32-bit symbols from
(72,32) randomly chosen block inner code in simplified two-state fading channel. The
error statistics (p1 and p2) for this inner code was shown in Table 5.4. Figure 9.1
illustrated the upper bound on probability of failure to decode the first information block
(FIB) with different number of maximum syndromes allowed. Note that,, the decoder
does not use this maximum number of syndrome for every decoding attempt. In fact, it
rarely uses more than one syndrome. This maximum number of syndromes is the limit
that the decoder will not attempt to decode with more syndromes if it has failed with
maximum number of syndromes allowed. The exact performances are illustrated for the
one and two syndromes. The upper bound performances are shown for the two, four,
eight and sixteen syndromes. It is obvious that this decoding technique is very powerful
even for a very simple convolutional code. For example, with p1 = 0.047 and p2 = 0.263,
this probability of failure is upper bound around 7*10-7 with maximum of 8 syndromes. It
is as expected that higher number of maximum syndromes allowed provides better
decoding performance for VSD. Significant gains are achieved by increasing the

156
maximum number of syndromes from one to two, two to four and four to eight. However,
the gain is considerably less when the maximum number of syndromes is increased from
eight to sixteen. This gain does increase for the higher value of p1 as expected. This is
because for lower range of p1, most of the correctable error events that occur can be
corrected with at most 8 syndromes. For higher range of p1, there are more error symbols
and therefore more error events that need more number of syndromes to correct.
Figure 9.2 shows that the expected number of syndromes used by the decoder for
different symbol error probabilities are very low even up to symbol error probability of
0.139, which is a very high symbol error probability of the first choice. This shows that
most of the time, only one syndrome is needed. Figure 9.3 shows the expected (relative)
complexity as a function of symbol error probability, which is also very low up to symbol
error probability of about 0.139. For example, even with symbol error probability of
0.139, the decoder needs only one syndrome for 87.1% of the time and two syndromes
for 10.9% of the time and more than two syndrome for about 2% of the time. Note that,,
the maximum number of syndromes used for both Figure 9.2 and 9.3 is sixteen. While
Figures 9.1-9.3 use the error statistics (p1 and p2) from the randomly chosen inner code,
Figure 9.4 shows the effect of the quality of the second choice by fixing the symbol error
probability of the first choice. It is as expected that lower p2 (i.e., better quality of the
second choice) results in better decoding performance of VSD. Note that,, the decoder
should use the more likely received symbol as the first choices since it achieves better
performance when p1 = 0.1 and p2 = 0.2 than when p1 = 0.2 and p2 = 0.1.

157
Figure 9.1 Performance of VSD for a (2,1,2) convolutional outer code. (exact values for 1 and 2 syndromes, upper bound for
2,4,8 and 16 syndromes)
1.00E-07
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0.020 0.040 0.060 0.080 0.100 0.120 0.140 0.160
Input symbol error probability of the first choice (p1)
Upp
erbo
und
on p
roba
bilit
y of
failu
re w
ith m
ax t
synd
rom
es
2 syndromesexact
1 syndromeexact
4 syndromes,bound
2 syndromes,bound
8 syndromes,bound
16 syndromes,bound

158
Figure 9.2 Average number of syndromes used in VSD for a (2,1,2) convolutional outer code.
0
0.5
1
1.5
2
2.5
0.020 0.040 0.060 0.080 0.100 0.120 0.140 0.160
Input symbol error probability of the first choice (p1)
Exp
ecte
d nu
mbe
r of s
yndr
omes
use
d

159
Figure 9.3 Expected complexity of VSD (relative to the one syndrome case) for a (2,1,2) convolutional outer code
0
1
2
3
4
5
6
0.020 0.040 0.060 0.080 0.100 0.120 0.140 0.160
Input Symbol error probability of the first choice (p1)
Rel
ativ
e co
mpl
exity
(com
pare
with
the
one
sym
drom
e ca
se)

160
Figure 9.4 Effect of the quality of the second choice on the performance of VSD
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+00
0 0.05 0.1 0.15 0.2 0.25 0.3
Symbol error prob. of the second choice given that the first choice is wrong (p2)
Upp
erbo
und
on p
roba
bilit
y of
failu
re w
ith m
ax k
syn
drom
es
2 syndromes, exact, p1 = 0.1
4 syndromes, bound, p1 =0.1
2 syndromes, exact, p1 = 0.2
4 syndromes, bound, p1 =0.2
2 syndromes, exact, p1 = 0.1, no second choice
4 syndromes, bound, p1 = 0.1, no second choice

Chapter 10
DISCUSSIONS & CONCLUSIONS
Vector symbol decoding (VSD) with lists of alternative vector symbol choices for
outer convolutional codes has been presented. Convolutional VSD is different from block
VSD and maximum distance code decoding in that it often requires only one or a few
syndromes in each decoding attempt of FIB. After each successful decoding,
convolutional VSD can move ahead and consider the next FIB and so on. However, block
VSD and maximum distance code decoding can only decode when it has received the
whole block. This means that convolutional VSD generally requires fewer computations
since the number of computations increases more than linearly with the number of
syndromes involved.
The use of lists of alternative vector symbol choices is shown to improve the
performance of VSD. It is seen that even with very short lists (i.e., lists of two)
considered in this thesis, the effect is significant. The degree of improvement depends on
the quality of the alternative choices. Since the thesis focus on the lists of two choices,
the effect of the quality of the second choice is illustrated. If longer lists are considered,
the performance of VSD will be improved especially when the symbol size is large
enough. The lists of two were chosen in this thesis for simplicity. The principle of VSD
with lists allows lists of more than two and variable list size. However, longer lists may
require a more complex inner decoder such as serial LVA with L > 2. In other cases such

162
as a fast frequency-hopping spread spectrum system, lists of three can be obtained with
no additional complexity; only more storage is needed.
The lists can result from many sources such as inner decoders and space diversity.
Some examples of vector symbol sources and channel conditions are considered in this
thesis. Specifically, the vector symbols are from a convolutional inner code, a randomly
chosen inner code, or a fast frequency-hopping spread spectrum system. The channels are
a simplified two-state fading channel, AWGN channel, Rayleigh fading with AWGN
channel and channel with interference. The two-state fading channel is basically a pure
bit erasure channel, where the received bit is either an erasure or an error-free bit.
Rayleigh fading with AWGN channel is assumed to be independent fading according to
the Rayleigh distribution in the bit level with the additive white Gaussian noise. Channel
with interference is assumed to have interferences from other users in the spread
spectrum system, but no additive noise since decoding error is mainly due to
interferences in this type of system.
To obtain the lists of alternative symbol choices, the List Viterbi Algorithm
(LVA) can be used for the convolutional inner code. For the frequency-hopping system,
the decoder is adapted so that it records the second choice as well as the first choice. For
randomly chosen inner codes, there is no practical method to find the alternative choices
by the inner decoder. However, it can provide the average error statistics (p1 and p2) and
it serves as example to illustrate the average quality of the second choice for an (n, k)
randomly chosen code.

163
To simplify the computer simulation of the VSD, only the error statistics (p1 and
p2) and not the actual bit patterns of the vector symbols from various inner codes are
considered. This simplification is required in the case of randomly chosen inner code
because the actual patterns of the vector symbols are not available from the analytical
result. For lists of two choices considered in this thesis, the error statistics are the symbol
error probability of the first choice (p1) and the symbol error probability of the second
choice given that the first choice is wrong (p2). These error statistics are found by
computer simulations for the inner convolutional code and for the frequency hopping
spread spectrum system in different channel conditions. They are found by analytical
method for the randomly chosen code. In the computer simulation of VSD algorithm, it is
assumed, without loss of generality, that an all-zero outer code word is transmitted. The
error symbols are generated according to the error statistics and it is also assumed that on
average, there are the same number of “1’s” and “0’s” in each error symbol.
For the maximum distance code, there are two ways to handle large vector symbol
size. The first one is called “non-interleaved Reed-Solomon code”, where the decoder is
assumed to use the same symbol size as the VSD directly. The second one is called
“interleaved Reed-Solomon code”, where it is constructed from many smaller vector
symbol size Reed-Solomon codes. The interleaved Reed-Solomon code is normally used
when it is needed to handle a large vector symbol size. For example, if the inner decoders
provide 24-bit symbols, VSD will use this symbols directly, while interleaved Reed-
Solomon code will divide each symbol into many smaller blocks such as three 8-bit
subblock/24-bit symbol. Therefore, an 8-bit subblock can be correct even when the 24-bit

164
symbol is wrong. Consequently, the interleaved Reed-Solomon code has a better
performance than the non-interleaved one.
The decoding failure probability of non-interleaved Reed-Solomon code is
computed analytically by using the property of the code that it can correct certain amount
of errors successfully and that it will fail when the number of errors exceeds its correction
capability. Results show that for 32-bit vector symbols from (2,1,4) convolutional inner
code, both the decoding failure probability and the post-decoded symbol error probability
of VSD are about two orders of magnitude lower than that of the non-interleaved Reed-
Solomon code, which has the same number of data bits and encoded bits.
The decoding failure probability of the interleaved Reed-Solomon codes is found
by computer simulations at the inner code level. The simulation is necessary because the
relationship between the symbol error probabilities of different symbol sizes depends
highly on the structure of the inner codes. Some examples of this relationship are shown
for two convolutional codes and for a BCH code in a binary symmetric channel.
Moreover, the correlation between each subblock of the total block of each vector symbol
depends on the inner codes and the burstiness of the channel and cannot be easily
generalized.
15-bit vector symbol from frequency hopping spread spectrum system is also
considered even though VSD is not designed to use this small symbol size. An extra step
is added in order to reduce the decoding failure probability due to the wrong recognitions.
With this extra step, the performance of VSD for the 15-bit symbol is improved, but it is
still worse than the 24-bit and 32-bit symbol case, especially in the low symbol error

165
probability range. Therefore, it is as expected that the decoding failure probability of
VSD will be considerably lower than that of the non-interleaved Reed-Solomon code for
the range that symbol error probability is quite large. The difference is seen to be closer
when the symbol error probability is small and if it is very small, Reed-Solomon code
may eventually have a better performance.
For vector symbols that come from convolutional inner code, they are also
compared with the interleaved Reed-Solomon code. This makes the comparison fairer
since an interleaved Reed-Solomon code provides better performance than the non-
interleaved one and it is usually used to handle large symbol size. The simulations are
done for the (2,1,4) convolutional code in three different types of channels: the simplified
two-state fading channel, AWGN channel and the Rayleigh fading with AWGN channel.
The decoding failure probability of VSD is about an order of magnitude lower than the
interleaved Reed-Solomon code in all three channels. The post-decoded symbol error
probability is not shown since VSD uses 24-bit symbols, while each of the three Reed-
Solomon codes before the interleaving uses 8-bit symbols.
For most comparisons in this thesis, the vector symbols are assumed to be either
error-free or erroneous. The possibility of erasure symbols is usually not considered in
the comparisons because VSD can currently handle errors only although it is possible to
extend VSD to handle both errors and erasures. To make the comparison really fair,
Reed-Solomon codes should be allowed to use both the interleaved Reed-Solomon codes
and have a mixture of errors and erasures. This should then be compared with VSD that
can handle a mixture of errors and erasures; this type of VSD still needs further study. If

166
the VSD with errors only is to be compared with interleaved Reed-Solomon code with a
mixture of errors and erasures, the difference between the performances will be closer.
They will be more competitive. However, it is expected that VSD with a mixture of
errors and erasures will have better performance than VSD with errors only. Therefore, it
is still not clear how close the difference in performance will be between interleaved
Reed-Solomon codes and VSD when both use a mixture of errors and erasures. If the
system is such that there are errors symbols, but no erasure symbols, then the comparison
between VSD with errors only and interleaved Reed-Solomon code with errors only will
be a fair comparison.
The analytical method for computing the performance of randomly chosen outer
codes for VSD with a mixture of errors and erasures are shown in [26]. Comparison
results between a (255,223) maximum distance code and a randomly chosen vector
symbol code are also shown in the same paper and it is seen that for the mixture of errors
and erasures assumption, the performance of VSD is considerably better than that of the
Reed-Solomon code for a long range of symbol error probability and symbol erasure
probability, especially in the severe channel condition. Both VSD and Reed-Solomon
codes use the same 32-bit symbols in the comparisons though. Further investigation is
needed for implementing VSD with a mixture of errors and erasures.
For this thesis, it is assumed that VSD can handle errors only. However, for the
benefit of Reed-Solomon code, Reed-Solomon code is allowed to have a mixture of error
symbols and erasure symbols for the random inner code. Specifically, a comparison of
VSD with errors only and non-interleaved Reed-Solomon code with a mixture of errors

167
and erasures are shown for a randomly chosen inner code in the simplified two-state
fading channel. For this type of inner code and channel, it is relatively easy to compute
the performance of non-interleaved Reed-Solomon code for a mixture of errors and
erasures analytically and the method is shown in Section 7.1.2. The comparison is done
for non-interleaved Reed-Solomon code in this case because the structure of the random
inner code is unknown and thus, the interleaved Reed-Solomon code cannot be used. The
outer code for VSD is the same (3,2,2) convolutional code for VSD with 21 symbols and
the outer code for maximum distance code is the (21,10) Reed-Solomon code. The
comparison result shows that the decoding failure probability of VSD with errors only is
almost half an order of magnitude lower than that of the non-interleaved Reed-Solomon
code with a mixture of errors and erasures for the 32-bit vector symbols from (72,32)
randomly chosen inner code.
One difference between convolutional VSD and the maximum distance code
decoding is that the former handles convolutional outer codes and the later handles block
outer codes. Note that,, the principle of VSD with lists of alternative symbol choices can
decode both block and convolutional outer codes, while maximum distance codes are
only in a restricted class of block codes. Therefore, VSD is more flexible in this aspect
and in particular, convolutional VSD has another advantage in terms of the ease of the
encoder. However, convolutional VSD requires the knowledge of the parity check matrix
of the outer code. This knowledge is well known for systematic convolutional codes, but
not for nonsystematic ones. This is because convolutional codes are usually decoded by
Viterbi decoding algorithm or sequential decoding algorithm [29], both of which do not

168
require this knowledge. Nonsystematic convolutional codes are desirable since they
usually provide better performance than the systematic ones. Therefore, a way to
compute the parity check matrix for any rate 1/2, 2/3 and 3/4 convolutional codes are
presented with the formula in each case. The author believes that the same method can be
used to find parity check matrix for any (n-1)/n convolutional codes. The parity check
matrix found can always be checked for its validity since G*HT must equal a zero matrix
if the parity check matrix is valid.
The performance of VSD in terms of decoding failure probability is also
evaluated by a recursive method for large vector union upper bound. The recursive
method is used to compute the weight structure of convolutional codes and a set of
equations are derived to find this upper bound. One motivation of finding the upper
bound analytically is that it helps justify the simulation results. Similar to the computer
simulation approach, the upper bound calculation uses the error statistics of the vector
symbols as the input parameters. As an example, the error statistics of the two-state
fading channel for 32-bit symbols are used. It is shown that the large vector union upper
bound is very close to the computer simulation result. However, the large vector upper
bound is an upper bound for large symbol size. If the symbol size is small such as 16 bits,
the simulation result can be higher than this upper bound. In further investigation of the
performance of VSD, the exact performance by computer simulation approach is used
since they can provide more information such as the post-decoded symbol error
probability or the performance for different symbol size.

169
In summary, the presented VSD has many advantages over Reed-Solomon Codes.
First, VSD has a much better performance than Reed-Solomon code at least for the
considered conditions. The second one is the simplicity of the outer encoder since it is the
structure of a relatively low memory convolutional code encoder. Moreover, the error
value calculation for outer convolutional codes can often employ forward substitution
technique instead of matrix inversion [17] and thus, reducing the complexity of VSD.
Furthermore, when VSD decoder fails, it almost always knows which part of the outer
code was decoded successfully and which part was not. With this knowledge, ARQ can
be employed easily and only the part that was not decoded successfully would be
retransmitted. Lastly, the VSD principle can be used to decode both block and
convolutional codes, while Reed-Solomon codes are only in a restricted class of block
codes. Note that,, VSD and Reed-Solomon codes may be used for different applications.
VSD is more suitable with r-bit symbols where r is large (such as 24 or 32 bits or more),
while Reed-Solomon codes usually deal with much fewer bits per symbols (such as 8
bits). In addition to concatenated code application, VSD can be used with some other
applications such as ALOHA-Like Random-Access Scheme as mentioned in [15].

Chapter 11
FUTURE WORK
The research may be extended in many aspects. First, VSD may be
extended to handle a mixture of errors and erasures. Some preliminary work on the
mixture of errors and erasure has been recently done by Metzner for a special case of
randomly chosen outer code and the analytical method for this case is shown in [26].
Although Reed-Solomon code is the best code for erasures only condition, a comparison
example in the same paper shows that for the mixture of errors and erasures case, the
performance of VSD is considerably better than that of the Reed-Solomon code for a long
range of symbol error probability and symbol erasure probability. The codes used in the
example are a (255,223) maximum distance code and a randomly chosen vector symbol
code. Note that,, both VSD and Reed-Solomon codes use the same 32-bit symbols in the
comparisons, which is not quite fair for the Reed-Solomon code since it can be
interleaved to achieve better performance. Further study is necessary to understand and
implement VSD for specific outer code and inner code, with a mixture of errors and
erasures.
Next, the idea of continuous error detection can be adapted for VSD to reduce the
size of the lists while having the advantages of long lists. The idea of continuous error
detection has recently been proposed by Boyd et. al. [65] in 1997, Chen and Sundberg
[20] in May 2001 and by Anand et. al. [66] in September 2001. Basically, the idea is that
instead of using error detection at the end of the whole received sequence, error detection

171
should be used in the “continuous” fashion. One way is to put a few extra check bits after
every certain number of encoded bits. These check bits are used to check the validity of
alternative choices in a list. If a choice does not check, it will be eliminated. By
periodically checking the validity of the choices this way, most of the wrong choices are
eliminated and only a very short list of one or two choices may survive at the end of the
sequence. Note that,, for VSD, each sequence can be considered as a vector symbol and
the survived short list is then the list of a vector symbol. Therefore, a long list can be
allowed for each group of the encoded bits and the error detection bits will eliminate the
choices that does not check and leave a very short list of choices at the end of the
sequence. If the correct choice is not in the list, it is likely that none of the choices will
check up to the end of the sequence. Then, the symbol is erased and this introduces
erasure symbols. Therefore, VSD must be able to handle a mixture of errors and erasures
to use this continuous error detection idea.
In another aspect, VSD may be extended to handle dependent errors more
effectively for the applications that require smaller symbol size. Dependent errors for
block codes are discussed in [49]. Moreover, the inner code for VSD will be more
flexible if there is the inner decoder of block codes that can produce the list of alternative
choices with relatively low complexity. Note that, one indirect way to find alternative
choices for block inner code is to use space diversity. In addition, VSD may use different
list size for different vector symbol. When a symbol is very reliable, may be there is only
one choice in its list. When a symbol is less reliable, there may be more than two choices
in its list. VSD algorithm can be modified to handle variable list size quite easily. The

172
more important point is to determine how many choices should be in each list and how to
obtain more choices with low complexity.
Finally, the channels considered in this thesis are all memoryless channels. The
performance of VSD should be extended for the case of channels with memory to make
the channel models and the resulting performance more realistic such as for wireless
communication.

BIBLIOGRAPHY
1. W. C. Jakes, Jr., Microwave Mobile Communications. New York, NY: John
Wiley & Sons, 1974.
2. J. M. Chung, J.J. Metzner, and U. Tuntoolavest, “Macrodiversity combining of
concatenated Majority-logic-like vector symbol codes in mobile communication
channels,” 1st IEEE Electro/Information Technology Conference Proceeding,
June 8-11,2000, Chicago, IL, paper session 207, paper reference EIT 558, file
name: chungmetznertuntoolavest.pdf in the Conference Proceedings CD.
3. P. Balaban and J. Salz, “Optimum diversity combining and equalization in digial
data transmission and applications to cellular mobile radio-Part I,” IEEE
Transactions on Communications, vol. 40, no.5, pp.885-894,May 1992.
4. P. Balaban and J. Salz, “Optimum diversity combining and equalization in digial
data transmission and applications to cellular mobile radio-Part II,” IEEE
Transactions on Communications, vol. 40, no.5, pp.895-907, May 1992.
5. A.R. Calderbank, N. Seshadri, and V. Tarokh, “Space-time codes for wireless
communication,” IEEE International Symposium on Information Theory
Proceedings, pp. 146, 1997.

174
6. V. Tarokh, N. Seshadri, and A.R. Calderbank, “Space-time codes for high data
rate wireless communication: performance criterion and code construction”, IEEE
Transactions on Information Theory, vol. 44, pp. 744-765, March 1998.
7. C.E. Shannon, “A mathematical theory of communication,” Bell System Technical
Journal, July 1948, pp.379-423 (Part 1), 623-656 (Part 2).
8. C. Berrou, A. Glavieux and P. Thitimajshima, “Near Shannon limit error-
correcting coding and decoding: turbo codes,” Proceedings of IEEE International
Conference on Communications, May 1993, pp. 1064-1070.
9. M. Fossorier and S. Lin, “Soft-decision decoding of linear block codes based on
ordered statistics,” IEEE Transactions on Information Theory, IT-41, September
1995, pp. 1379-1396.
10. G.D. Forney, Jr., Concatenated Codes, MIT Press, Cambridge Mass.,1966.
11. I.S. Reed and G. Solomon, “Polynomial codes over certain finite fields,” SIAM
Journal on Applied Mathematics, vol.8, 1960, pp. 300-304.
12. E. R. Berlekamp, Algebraic Coding Theory, McGraw-Hill, London, 1968.
13. S. B. Wicker and V.K. Bhargava, Reed-Solomon Codes and Their Applications,
IEEE Press, New York, 1994.

175
14. J.J. Metzner and E.J. Kapturowski, “A general decoding technique applicable to
replicated file disagreement location and concatenated code decoding,” IEEE
Transactions on Information Theory, vol. 36, July 1990, pp. 911-917.
15. C. Haslach and A. J. Han Vick, “A Decoding algorithm with restrictions for array
codes,” IEEE Transactions on Information Theory, vol. 45, no. 7, pp. 2339-2344,
November 1999.
16. J.J. Metzner, “Vector symbol decoding with list inner symbol decisions,”
International Symposium on Information Theory 2000, June 25-30, 2000,
Sorrento, Italy.
17. Y.S. Seo, A new decoding technique for convolutional codes, Ph.D. Thesis,
Pennsylvania State University, May 1991.
18. N. Seshadri and C-E. W. Sundberg, “Generalized Viterbi algorithms for error
detection with convolutional codes,” GLOBECOM’ 89, Dallas, Texas, November
1989, Conference record, pp. 1534-1538.
19. N. Seshadri and C-E. W. Sundberg, “List Viterbi decoding algorithms with
applications,” IEEE Transactions on Communications, vol. 42, pp. 313-323,
Feb./Mar./Apr. 1994.
20. B. Chen and C-E. W. Sundberg, “List Viterbi algorithms for continuous
transmission,” IEEE Transactions on Communications, vol. 49, no.5, pp. 784-
792, May 2001.

176
21. S. H. Kim and S. W. Kim, “Frequency-hopped multiple-access communications
with multicarrier on-off keying in Rayleigh fading channel,” IEEE Transactions
on Communications, vol. 48, no.10, pp. 1692-1701, October 2000.
22. M.Z. Win, and R. A. Scholtz, “Ultra-wide bandwidth time-hopping spread
spectrum impulse radio for wireless multiple-access communications,” IEEE
Transactions on Communications, vol. 48, no. 4, pp. 679-691, April 2000.
23. T. Kasami, T. Takata, T. Fujiwara and S. Lin, “A concatenated coded modulation
scheme for error control,” IEEE Transactions on Communications, vol. 38,no. 6,
pp.752-763, June 1990.
24. T. Kasami, T. Takata, K. Yamashita, T. Fujiwara and S. Lin, “On bit-error
probability of a concatenated coding scheme,” IEEE Transactions on
Communications, vol. 45, no. 5, pp. 536-543, May 1997.
25. O. R. Jensen and E. Paaske, “Forced sequence sequential decoding: A
concatenated coding system with iterated sequential inner decoding,” IEEE
Transactions on Communications, vol. 46, no. 10, pp. 1280-1291, October 1998.
26. J.J. Metzner, “Vector symbol decoding with erasures, errors and symbol list
decisions,” (submitted to ISIT 2002)
27. S. Lin and D.J. Costello, Jr., Error Control Coding: Fundamentals and
Applications, pp.329-330, Prentice-Hall, Englewood Cliffs, N.J.,1983.

177
28. P. Elias, “Coding for noisy channels,” Institute of Radio Engineers Convention
Record, Part 4, pp. 37-47, 1955.
29. J. M. Wozencraft and B. Reiffen, Sequential Decoding, MIT Press, Cambridge,
Mass., 1961.
30. J. L. Massey, Threshold Decoding, MIT Press, Cambridge, Mass., 1963.
31. A.J. Viterbi “Error bounds for convolutional codes and an asymptotically
optimum decoding algorithm,” IEEE Transactions on Information Theory. IT-13,
April 1967.
32. A.J. Viterbi, “Convolutional codes and their performance in communications
systems,” IEEE Transactions on Communications Technology, vol. CT-19, pp.
751-771,Oct. 1971.
33. A.J. Viterbi and J.K. Omura, Principles of Digital Communication and Coding.
McGraw-Hill Book Company, New York, NY, 1979.
34. S. B. Wicker, Error Control Systems, Englewood Cliffs, NJ: Prentice-Hall, 1995.
35. R. C. Bose and D.K. Ray-Chaudhuri, “On a class of error correcting binary group
codes,” Information and Control, Vol. 3, pp. 68-70, March 1960.
36. R. C. Bose and D.K. Ray-Chaudhuri, “Further results on error correct binary
group codes,” Information and Control, Vol. 3, pp. 279-290, September 1960.

178
37. D. Gorenstein and N. Zierler, “A class of cyclic linear error-correcting codes in
pm symbols,” Journal of Society for Industrial and Applied Mathematics, 9, pp.
107-214, June 1961.
38. W. W. Peterson, “Encoding and error-correction procedures for the Bose-
Chaudhuri codes,” IRE IEEE Transactions on Information Theory, IT-6, pp. 459-
470, Sept 1960.
39. E.R. Berlekamp, H. Rumsey and G. Solomon, “On the solution of algebraic
equations over finite fields,” Information and Control, vol. 10, pp. 553-564, 1967.
40. E. R. Berlekamp, “On decoding binary Bose-Chaudhuri-Hocquenghem codes,”
IEEE Transaction on Information Theory, IT-11, pp. 577-580, October 1965.
41. A.M. Michelson and A.H. Levesque, Error-Control Techniques for Digital
Communication, New York: John Wiley & Sons, 1985.
42. D. M. Mandelbaum, “An adaptive feedback coding scheme using incremental
redundancy,” IEEE Transactions on Information Theory, vol. 20, pp. 388-389,
May 1974.
43. D. M. Mandelbaum, “On forward error correction with adaptive decoding,” IEEE
Transactions on Information Theory, vol. 21, pp. 230-233, March 1975.

179
44. J. L. Massey, “The how and why of channel coding,” Proceedings of the 1984
Zurich Seminar on Digital Communications, IEEE No. 84 CH 1998-4, pp. 67-73,
1984.
45. J. Snyders, "Reduced lists of error patterns for maximum likelihood soft
decoding," IEEE Transactions on Information Theory, vol. 37, pp. 1194-1200,
July 1991.
46. M.A. Shokrollahi and H. Wasserman, “List decoding of algebraic-geometric
codes,” IEEE Transactions on Information Theory, vol. 45, no.2, pp.432-437,
March 1999.
47. J.G. Proakis, Digital Communications, Third edition, McGraw-Hill, 1995.
48. B. P. Lathi, Modern Digital and Analog Communication Systems, Third edition,
Oxford University Press, 1998.
49. J.J. Metzner, “Vector symbol decoding with list inner symbol decisions and
dependent errors,” (submitted to IEEE Transaction on Communications.)
50. U. Tuntoolavest and J.J. Metzner, “Vector symbol decoding with list inner
symbol decisions: performance analysis for a convolutional code,” 1st IEEE
Electro/Information Technology Conference Proceeding, June 8-11,2000,
Chicago, IL, paper session 105, paper reference EIT 574, file name:
tuntoolavestmetzner.pdf in the Conference Proceedings CD.

180
51. K.T. Oh and J.J. Metzner, “Performance of a general decoding technique over the
class of randomly-chosen parity check codes,” IEEE Transactions on Information
Theory, vol. 40, pp.160-166, January 1994.
52. L. H. C. Lee, “Computation of the right-inverse of G(D) and the left-inverse of
Ht(D),” Electronic letters, vol. 26, no.13, June 1990, pp. 904-906.
53. U. Tuntoolavest and J.J. Metzner, “Vector symbol decoding with list inner
symbol decisions and outer convolutional codes for wireless communications,”
2nd IEEE Electro/Information Technology Conference Proceeding, June 6-9,2001,
Oakland University, paper session TE 301, paper reference EIT 164, file name:
TE301_3F.doc in the Conference Proceedings CD.
54. L.-L. Yang, K. Yen, and L. Hanzo, “A Reed-Solomon coded DS-CDMA system
using noncoherent m-ary orthogonal modulation over multipath fading Channels,”
IEEE Journal on Selected Areas in Communications, vol 18, no. 11, pp. 2240-
2251, November 2000.
55. Y. F. M. Wong and K. B. Letaief, “Concatenated coding for DS/CDMA
transmission in wireless communications,” IEEE Transaction on
Communications, vol 48, no. 12, pp. 1965-1969, December 2000.
56. G. Ungerboeck, “Channel coding with multilevel/phase signals,” IEEE
Transactions on Information Theory, IT-28, pp. 55-67, January 1982.

181
57. C. G. F Valadon, R. Tafazolli and B. G. Evans, “ Performance evaluation of
concatenated codes with inner trellis codes and outer Reed-Solomon code,” IEEE
Transactions on Communications, vol 49, no. 4, pp. 565-570, April 2001.
58. D. J. Rhee and S. Lin, “Multilevel concatenated-coded M-DPSK modulation
schemes for the shadowed mobile satellite communication channel,” IEEE
Transactions on Vehicular technology, vol. 48, no. 5, September 1999.
59. U. Tuntoolavest and J.J. Metzner, “Vector symbol convolutional decoding with
list symbol decisions,” accepted for publication in Integrated Computer-Aided
Engineering Journal.
60. W. H. Press, S. A. Teukolsky, W. T. Vetterling and B. P. Flannery, Numerical
Recipes in C: The Art of Scientific Computing. Cambridge University Press, 1992.
61. U. K. Sorger, “A new Reed-Solomon code decoding algorithm based on
Newton’s interpolation,” IEEE Transactions on Information Theory, vol. 39, no.
2, pp. 358-365, March 1993.
62. J. L. Massey, “Shift-register synthesis and BCH decoding,” IEEE Transactions on
Information Theory, IT-15, pp.122-127, Jan 1969.
63. R. Kotter, “Fast generalized minimum-distance decoding of algebraic-geometry
and Reed-Solomon codes,” IEEE Transactions on Information Theory, vol. 12,
no. 3, pp.721-737, May 1996.

182
64. E.R. Berlekamp, “Bit-serial Reed-Solomon Encoder,” IEEE Transactions on
Information Theory, IT-28, no. 6, pp. 869-874, November 1982.
65. C. Boyd, J. Cleary, S. Irvine, I. Rinsma-Melchert, and I. Witten, “Integrating error
detection into arithmetic coding,” IEEE Transactions on Communications, vol.
45, pp. 1-3, January 1997.
66. R. Anand, K. Ramchandran, and I.V. Kozintsev, “Continuous error detection
(CED) for reliable communication,” IEEE Transactions on Communications, vol.
49, pp. 1540-1549, September 2001.

VITA
Usana Tuntoolavest Present Address: Permanent Address: 626 S. Pugh St. Apt #25 642/3-7 Wongsawhang rd., State College, PA 1680, USA Bangsue, Bangkok 10800 (814)867-4941, [email protected] THAILAND (662)9109840
EDUCATION: Ph.D. in Electrical Engineering, Concentration in Communications The Pennsylvania State University, PA, USA. GPA 3.96/4.00 M.S. in Electrical Engineering, December 1997, Concentration in Communications The Pennsylvania State University, PA, USA. GPA 3.93/4.00 B.Eng in Electrical Engineering, March 1995, Chulalongkorn University, Bangkok, Thailand SELECTED EMPLOYMENT: Instructor EE/CSE 458 Data Communications. (Summer 1998, Summer and Fall 2000) Teaching Assistant EE/CSE 458 Data Communications. (Fall 1998-Spring 1999 and Fall 2001) EE/CSE 554 Error Correcting Codes. (Spring 2000) SELECTED PUBLICATIONS: 1. U. Tuntoolavest and J.J. Metzner, “Vector symbol decoding with list inner symbol decisions: performance analysis for a convolutional code,” 1st IEEE Electro/Information Technology Conference Proceeding, June 8-11,2000, Chicago, IL 2. U. Tuntoolavest and J.J. Metzner, “Vector symbol decoding with list inner symbol decisions and outer convolutional codes for wireless communications,” 2nd IEEE Electro/Information Technology Conference Proceeding, June 6-9,2001, Oakland University. 3. U. Tuntoolavest and J.J. Metzner, “Vector symbol convolutional decoding with list symbol decisions,” accepted for publication in Integrated Computer-Aided Engineering Journal. HONORS: TAU BETA PI National Engineering Honor Society Second Place Award from 2nd IEEE Electro/Information Technology Conference, 2001