vector representatation of surfaces - eastern mediterranean
TRANSCRIPT

VECTOR REPRESENTATATION OF SURFACES
Consider a plane surface S which is either an open surface or part of a closed
surface. The vector surface is defined as:
ˆnS Sa
Where S is the area of the given surface, and ˆna , is the unit vector
perpendicular to the surface.
If S is a part of a closed surface, positive ˆna is taken to be an outward
normal. If S is an open surface, first its periphery is oriented and then ˆna is
defined with the right-hand rule. Positive ˆna is thus selected arbitrarily.
ORTHOGONAL COORDINATE SYSTEMS
In a three dimensional space a point can be located as the intersection of
three surfaces. When the surfaces intersect perpendicularly we have an
orthogonal coordinate system.
Cartesian Coordinates:
Here, the constant surfaces are .x const , .y const and .z const
Point 1 1 1 1( , , )P x y z is located at the intersection of three surfaces.

Constant Surfaces
Fig. 2-1 Cartesian coordinates constant surfaces
.x const Planar Surface
.y const Planar Surface
.z const Planar Surface
Unit Vectors
ˆxa x const. Surface
ˆya y const. Surface
ˆza z const. Surface

Differential Length Element
ˆ ˆ ˆx y zdl a dx a dy a dz
Fig. 2-2 Differential Length Elements in the Cartesian coordinate system
Differential Surface Elements:
ˆ
ˆ
ˆ
x x
y y
z z
ds dydz a
ds dxdz a
ds dz dya

Fig.2-3 Differential Surface Elements in the Cartesian coordinate system
Differential Volume Element
dV dxdydz
Cylindrical Coordinates
The constant surfaces are: .const , .const , .z const
Point 1 1 1( , , )P z is located at the intersection of three surfaces.
Fig. 2-4 Cylindrical Coordinates, constant surfaces.

Constant Surfaces
.,const Circular cylinders
.,const Planes
.,z const Planes
Ranges of variables:
0
0 2
z
Unit Vectors
Fig. 2-5 Cylindrical Coordinates, unit vectors.

ˆ , .a const Surface
ˆ , .a const Surface
ˆ , .za z const Surface
Differential Length Elements
ˆ ˆ ˆzd a d a d a dz
Fig. 2-6 Differential Length Elements in the Cylindrical Coordinate system.

Differential Volume Element
dV d d dz
Differential Surface Elements
ˆds a d dz
ˆds a d dz
ˆz zds a d d
Fig. 2-7 Differential surface elements in the cylindrical coordinate system.

The unit vectors obey the following right-hand cyclic relations:
ˆ ˆ ˆza Xa a
ˆ ˆ ˆza Xa a
ˆ ˆ ˆza Xa a
Also, like the other vectors:
ˆ ˆ. 1a a
ˆ ˆ. 1a a
ˆ ˆ. 1z za a
ˆ ˆ. 0a a
ˆ ˆ. 0za a
ˆ ˆ. 0za a

Cylindrical Unit Vectors in Terms of Cartesian Unit Vectors
Fig. 2-8 Cylindrical Unit Vectors in Terms of Cartesian Unit Vectors
ˆ ˆ ˆcos sinx ya a a
ˆ ˆ ˆsin sx ya a a co
ˆ ˆz za a
Similarly;
ˆ ˆ ˆcos sinxa a a
ˆ ˆ ˆsin sya a a co
ˆ ˆz za a

Relationship between ( , , )x y z and ( , , )z :
Fig.2-9 Relationship between ( , , )x y z and ( , , )z
2 2 1
cos , sin ,
, tan ,
x y z z
xx y z z
y

Spherical Coordinates
The constant surfaces are: .r const , .const , .const
Point 1 1 1( , , )P r is located at the intersection of three surfaces.
Fig. 2-10 Unit vectors in spherical coordinates.
Unit Vectors
ˆ , .ra r const Surface
ˆ , .a const Surface

ˆ , .a const Surface
Ranges of variables:
0
0
0 2
r
Constant Surfaces
.,r const Spherical Surfaces
.,const Conical Surfaces
.,const Planes
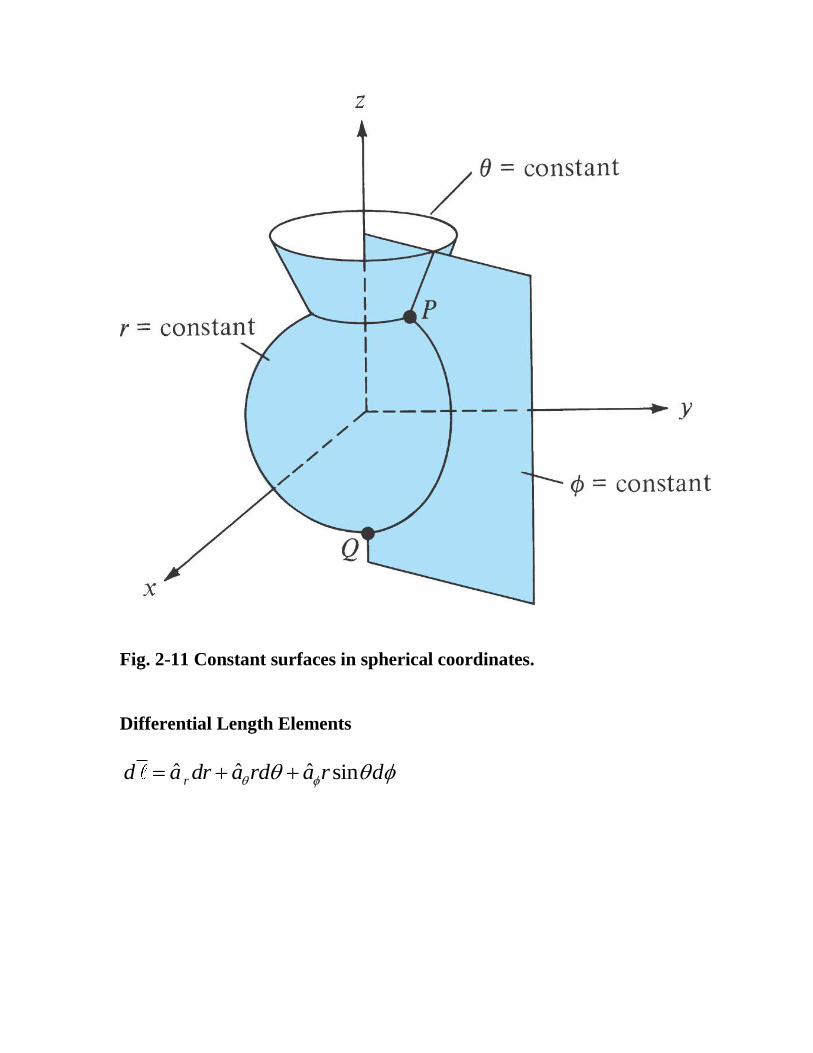
Fig. 2-11 Constant surfaces in spherical coordinates.
Differential Length Elements
ˆ ˆ ˆ sinrd a dr a rd a r d

Fig. 2-11 Differential length elements for spherical coordinates.
Differential Volume Element
2 sindV r drd d
Differential Surface Elements
2ˆ sinr rds a r d d
ˆ sinds a r drd
ˆds a rdrd

Fig. 2-12 Differential surface elements for spherical coordinates.
The unit vectors obey the following right-hand cyclic relations:
ˆ ˆ ˆra Xa a
ˆ ˆ ˆra Xa a
ˆ ˆ ˆra Xa a
Also, like the other vectors:
ˆ ˆ. 1r ra a
ˆ ˆ. 1a a
ˆ ˆ. 1a a
ˆ ˆ. 0ra a
ˆ ˆ. 0a a
ˆ ˆ. 0ra a

Spherical Unit Vectors in Terms of Cartesian Unit Vectors
Fig. 2-13 Unit vector relations between Cartesian and spherical coordinates.
ˆ ˆ ˆ ˆsin cos cos cos sin
ˆ ˆ ˆ ˆsin sin cos sin s
ˆ ˆ ˆcos sin
x r
y r
z r
a a a a
a a a co a
a a a
ˆ ˆ ˆ ˆsin cos sin sin cos
ˆ ˆ ˆ ˆcos cos cos sin sin
ˆ ˆ ˆsin s
r x y z
x y z
x y
a a a a
a a a a
a a co a

Relationship between ( , , )x y z and ( , , )r :
Fig. 2-14 Relationship between Cartesian coordinates and spherical
coordinates.
2 2
2 2 2 1 1, tan , tan
sin cos , sin sin , cos
x y yr x y z
z x
x r y r z r