unmanned maze solver using aerial image processing and wireless connectivity to direct a robot...
TRANSCRIPT

Unmanned Maze Solver
Using aerial image processing and wireless connectivity to direct a robot through a maze.
Nicholas Hoover
Matthew Mitrik
Edward Waxler

Overview
Aerial camera views terrain below (maze)Converts image into symbolic formFinds path through the terrain (maze)Communicates path wirelessly to unmanned vehicle (robot)Vehicle follows given path

Major System Components
MazeBase Station (camera, PC, wireless node)Robot

Maze Tile Templates
Tile templates can be used to reconfigure a maze on the fly

Image Capturing
Sony EVI-D100Osprey-210 Analog Capture Card Up to 30 frames/sec

Image Processing
Intel OpenCV Image
Filtering Template
Matching

Maze Before & After Extraction
Dijkstra’s shortest path algorithm will be used to solve the maze

Graphical User Interface
Real-time feed
Graphical representation
Overrides
Status
Video
Forward
Reverse
Rotate Left
Rotate Right
Transmit path #
Halt
Resume
Distress
Finished
Stopped
Communicating
Communication Network
Two nodes Base station Robot
Mica2 MotesTwo-way reliable communication

Mica2 Motes
CompactLow-powerIntegrated solution

Packet Format
Description
Preamble (1 Byte) Indicates the beginning of a packet.
Packet Number (1 Byte)
Number of payload bytes in the packet.
Payload (12 Bytes Max) Contains up to 12 bytes of control, recipe, or override commands. Each command will follow the message format described previously.
Checksum (1 Byte) One byte checksum to ensure the payload was transmitted correctly.
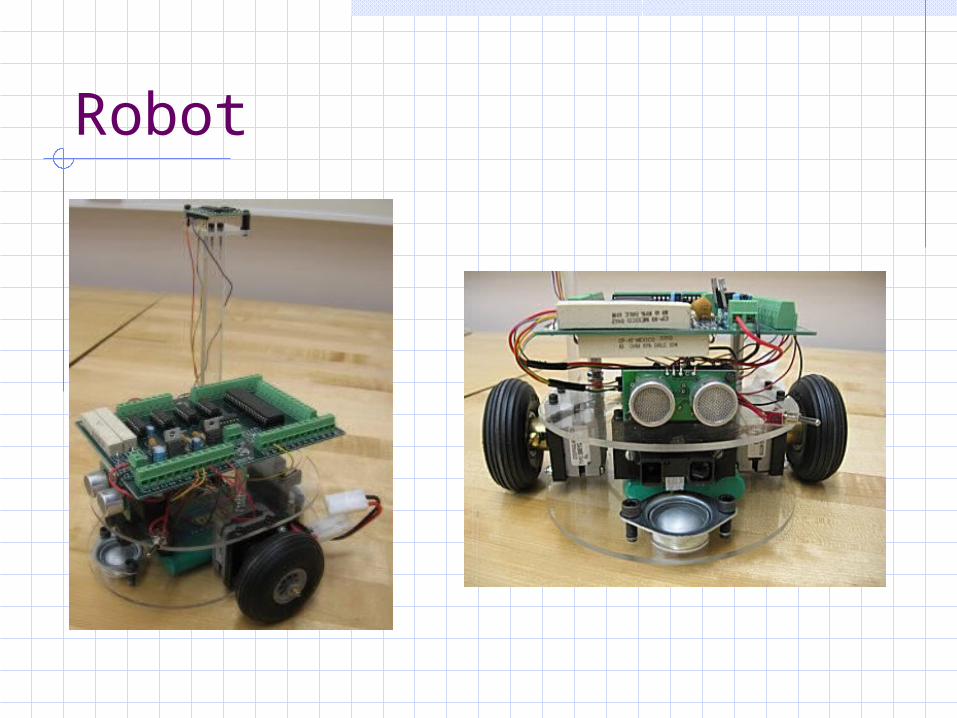
Robot

Robot Block Diagram

Messaging Protocol
Control Recipe Commands
Overrides
Heartbeat
DistressACKStartDONE
ForwardLeft TurnRight TurnEndR
Forward StepBackward
StepCCW StepCW StepPauseResumeReset

Project MilestonesFinal project proposal and design review, sample maze tiles 12/1/2005
Basic mote messaging, maze solving algorithm 12/8/2005
Website started 12/13/2005
Image recognition of robot, basic robot movement, overrides and robot UI
12/15/2005
Final maze construction, wireless protocol implementation, sensors working
1/5/2006
Image recognition of maze tiles and robot, robot-mote communication 1/12/2006
Symbolic graph extraction of maze, full wireless communication 1/19/2006
Base station GUI, begin integration 1/26/2006
Integration and reliability testing 2/2/2006
Poster, presentation, final report 2/9/2006
Project write-up, website, and demonstration (Instructor) 2/14/2006
Public demonstration 2/16/2006
Team Assessments 2/22/2006

Bill of Materials
Component Price Quantity
Camera $959.00 1
Maze & Fixture $50.00 1
Mica2 Mote $125.00 2
Mica Interface Board $95.00 1
PIC18F4320 uController $8.17 1
UC3770 Motor Controller
$5.56 4
Tires $5.99 2

Bill of Materials II
Component Price Quantity
Stepper Motors $6.49 2
9.6V Rechargeable Battery
$8.99 1
Battery Charger $26.99 1
Acrylite FF Sheets $9.99 1
Ball Bearings $9.99 1
LEDs, Switches, Misc. $10.00 1
QRB1113 Optoreflectors
$1.50 8

Questions?
???