university of tehran 1 interface design omid fatemi
TRANSCRIPT

University of Tehran 1
Interface Design
Omid Fatemi

University of Tehran 2
Typical Interface Design
Connect Compute Convey Cooperate
Sense RealityTouch RealityConnectTransform
Embedded SystemsMicrosAssembler, CReal-TimeMemoryPeripheralsTimersDMA
PC interfacesHCI
BussesProtocolsStandardsPCIIEEE488SCSIUSB & FireWireCAN

University of Tehran 3
Sensors : Review
• voltage source
– directly measured
• variable resistance
– can be converted to a voltage and measured
– voltage divider for coarser measurements
– wheatstone bridge for finer measurements
• variable capacitance
• variable inductance
• variable signal
University of Tehran 4
Touch Reality
“adding to the real world”

University of Tehran 5
Motors
• coils of conductive wire
• magnetic fields
• rotational motion
– except for linear induction motor
• everywhere from the very large (LRT) to the very
small (toys)
• electrical energy converted to mechanical

University of Tehran 6
Stepper Motors
• more accurately controlled than a normal
motor allowing fractional turns or n
revolutions to be easily done
• low speed, and lower torque than a
comparable D.C. motor
• useful for precise positioning for robotics
• Servomotors require a position feedback signal for control
University of Tehran 7
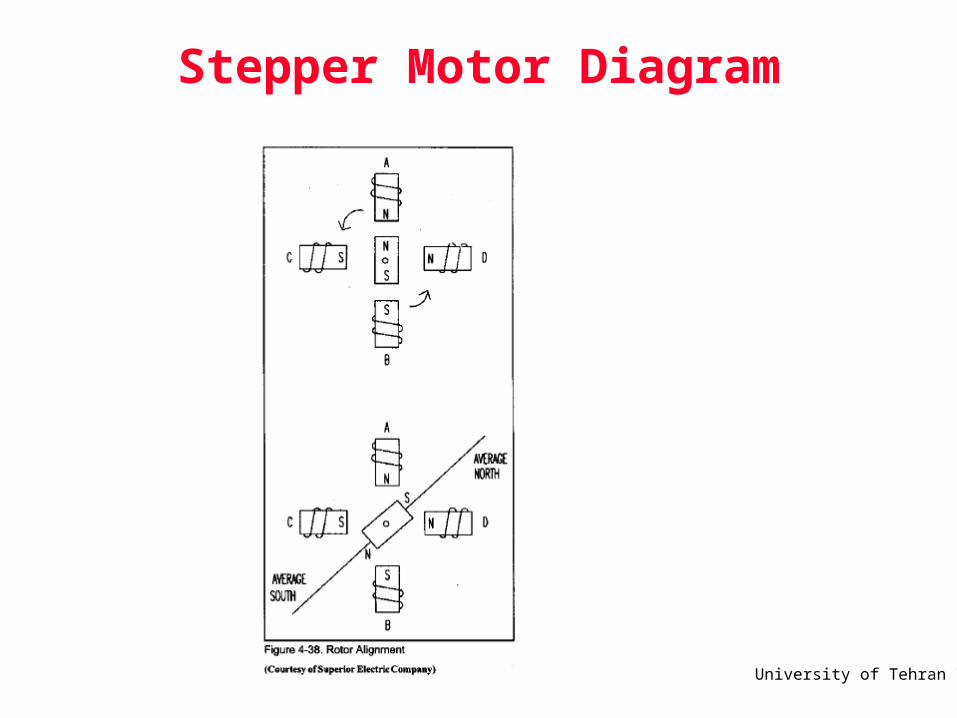
Stepper Motor Diagram
University of Tehran 8
Stepper Motor Types
– Variable Reluctance
– Unipolar/Bipolar Permanent Magnet

University of Tehran 9
Variable Reluctance Motors

University of Tehran 10
Variable Reluctance Motors
• This is usually a four wire motor – the common wire goes to the +ve supply and the windings are stepped through
• Our example is a 30o motor
• The rotor has 4 poles and the stator has 6 poles
• Example

University of Tehran 11
Variable Reluctance Motors
• To rotate we excite the 3 windings in sequence
– W1 - 1001001001001001001001001 – W2 - 0100100100100100100100100 – W3 - 0010010010010010010010010
• This gives two full revolutions
University of Tehran 12
Unipolar Motors
University of Tehran 13
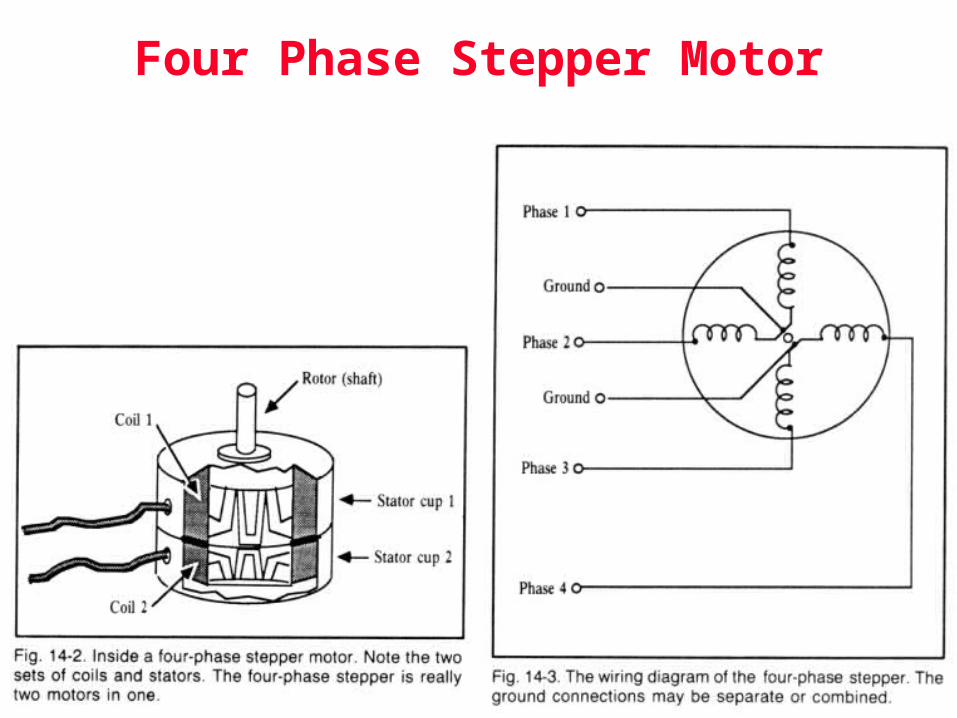
Four Phase Stepper Motor

University of Tehran 14
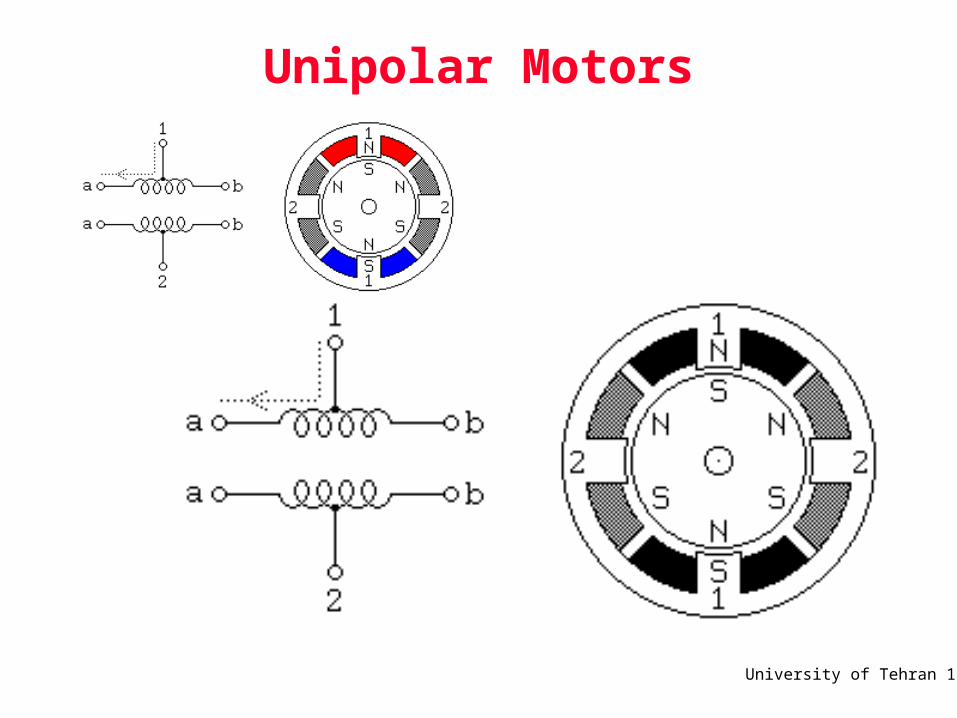
Unipolar Motors
• This is usually a 5 or 6 wire motor – with a centre tap on each of the two windings – the two taps are typically wired to the +ve
• Our example is a 30o motor
• The rotor has 6 poles and the stator has 4 poles
• Example

University of Tehran 15
Unipolar Motors
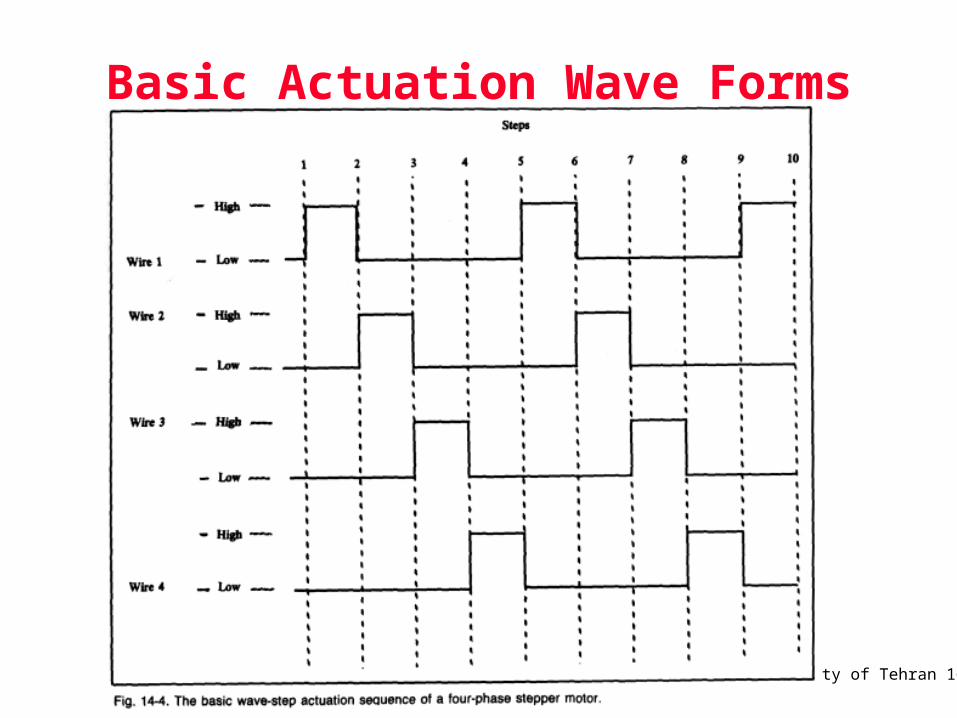
• To rotate we excite the 2 windings in sequence
– W1a - 1000100010001000100010001 – W1b - 0010001000100010001000100 – W2a - 0100010001000100010001000– W2b - 0001000100010001000100010
• This gives two full revolutions
University of Tehran 16
Basic Actuation Wave Forms

University of Tehran 17
Unipolar Motors
• To rotate we excite the 2 windings in sequence– W1a - 1100110011001100110011001 – W1b - 0011001100110011001100110 – W2a - 0110011001100110011001100 – W2b - 1001100110011001100110011
• This gives two full revolutions at 1.4 times greater torque but twice the power

University of Tehran 18
Enhanced Waveforms
• better torque
• more precise control
University of Tehran 19
Unipolar Motors
• The two sequences are not the same, so by combining the two you can produce half stepping
– W1a - 11000001110000011100000111 – W1b - 00011100000111000001110000 – W2a - 01110000011100000111000001 – W2b - 00000111000001110000011100

University of Tehran 20
Torque vs. Speed

University of Tehran 21
Motor Control Circuits
• Fundamentally a circuit as below is required

University of Tehran 22
Motor Control Circuits
• We must deal with the inductive kick when the switches are turned off. We can shunt this using diodes.

University of Tehran 23
Motor Control Circuits
• In order to interface the stepper motor with a μP (or similar) we need a TTL compatible circuit. The 5v control should be well regulated. The motor power will not require regulation.

University of Tehran 24
Motor Control Circuits
• For low current options the ULN200x family of Darlington Arrays will drive the windings direct.

University of Tehran 25
Interfacing to Stepper Motors

University of Tehran 26
8255 PPI

University of Tehran 27
Stepper Motor Step Angles

University of Tehran 28
Terminology
• Steps per second, RPM
– SPS = (RPM * SPR) /60
• Number of teeth
• 4-step, wave drive 4-step, 8-step
• Motor speed (SPS)
• Holding torque
University of Tehran 29
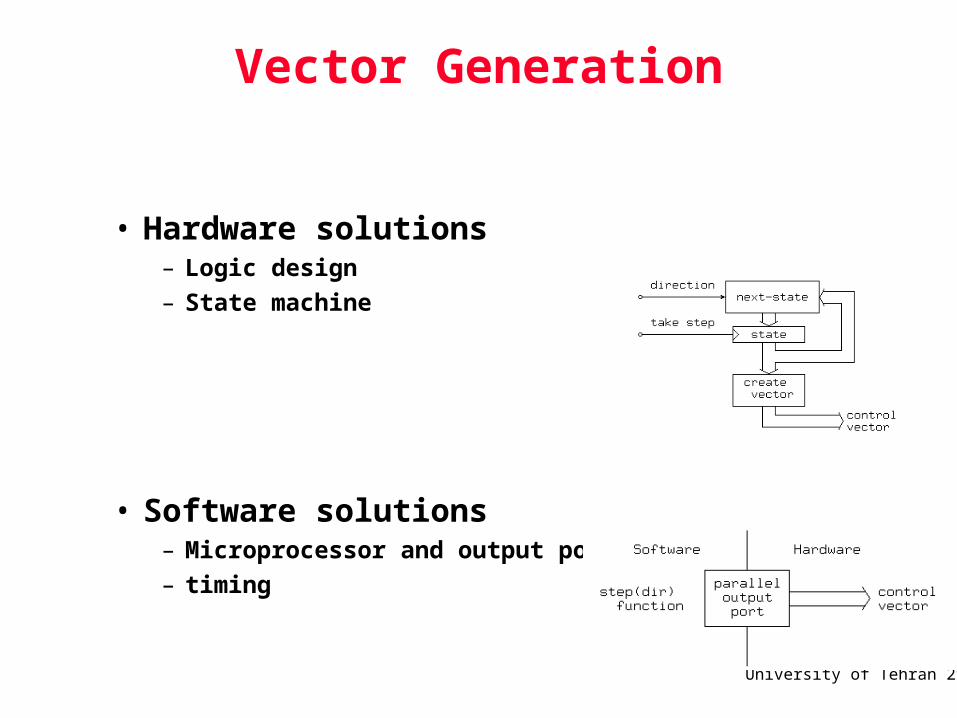
Vector Generation
• Hardware solutions– Logic design
– State machine
• Software solutions– Microprocessor and output ports
– timing

University of Tehran 30
Example
University of Tehran 31
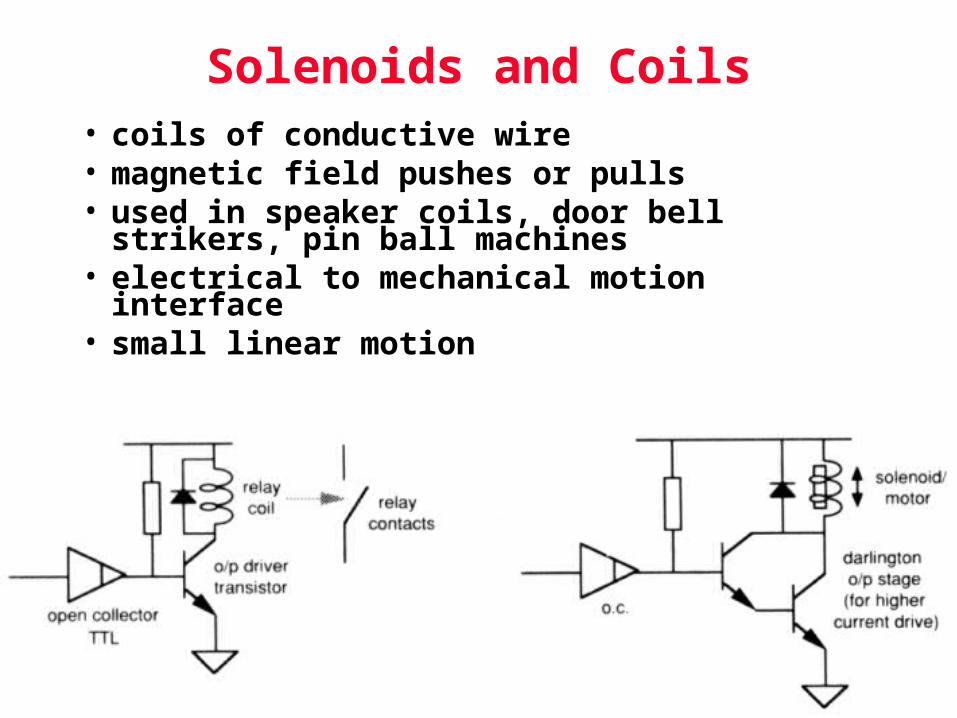
Solenoids and Coils• coils of conductive wire• magnetic field pushes or pulls• used in speaker coils, door bell strikers, pin ball
machines• electrical to mechanical motion interface• small linear motion

University of Tehran 32
Piezoelectric
• crystalline structure; locked, repetitive distribution of molecules and charge
• a small amount of uneven force on the material will produce a charge imbalance in the matrix and create a voltage potential which can be measured and used as a sensor
• conversly, a voltage potential can be applied across it and it will cause the crystal to deform– small speakers, beepers
University of Tehran 33
Heaters, Coolers
• electricity through wire generates heat because the conductance is not infinite
• power = V*V/R– hair dryers, pipe heaters, seat warmers
• electricity through a thermocouple can generate heat– if applied in reverse, it can absorb heat or cool
» electric coolers for cars
University of Tehran 34
Thermal Shape Memory Effect
A shape memory alloy is capable of remembering a previously memorized shape. It has to be deformed in its low temperature phase Martensite and subsequently heated to the high temperature phase Austenite, e.g. in hot water or with an electrical current. The alloy generates a high force during the phase transformation. Thus, it can be used as an actuator in a multitude of different applications. The shape change is not restricted to just pure bending. The most suitable actuation mode has proved to be the linear contraction of a straight wire actuator.In contradiction to the mechanical shape memory effect, the thermal shape memory effect is related to a heat stimulus, with which the Memory-Metal is capable of delivering a high amount of work output per material volume.

University of Tehran 35
Mechanical Shape Memory Effect: Superelasticity
Shape memory alloys are able to show an obviously elastic deformation behaviour which is called Mechanical Shape Memory Effect or Superelasticity. This deformation can be as high as 20x of the elastic strain of steel.
Reason for the superelasticity is the stress induced phase transformation from the high temperature phase Austenite into the low temperature phase Martensite. The strain related to this phase transformation is fully reversible after removing the stress. The commercial NiTinol alloys show as much as 8% of superelastic strain. Temperature changes are not necessary for the superelasticity.

University of Tehran 36
Martensite DeformabilityThe martensitic low temperature phase can be deformed similar to pure Tin: it can be bent back and forth without strain hardening. Thus, the risk of breakage of a component made from martensitic NiTinol is significantly lower as for instance in stainless steel. And finally when heated into the austenitic phase, the alloy recovers its initial shape.
The metallurgical reason for the martensite deformability is the twinned structure of the low temperature phase: the twin boundaries can be moved without much force and without formation of dislocations, which can be considered as being the initiator of fracture
University of Tehran 37
Shape Memory Alloy
• also known as: muscle wire, nitinol, flexinol
• nickle/titanium alloy
• metal crystalline structure undergoes shape change with a change in temperature
• two stable states: martensite (cooled state), austenite (heated state)
• can generate enough force to move thousands of times its own weight

University of Tehran 38
SMA continued
• silent linear movement has life like quality– no motors required for robotic limbs
• low voltage, easily interfaced to a microcontroller
• wire length shrinks by up to 8% but typically 5% is used
• wire can snap from overheating caused by excessive current or by over stressing it

University of Tehran 43
Photons
• electricity can be turned into light directly (LEDs) or indirectly through heat
– LEDs can be combined to create a multisegment display for alphanumerics
– all colors available now
– coherent light beams can be made from laser diodes
• vacuum tubes still most common form of display for TV and computers