universidad nacional de ingenieriacybertesis.uni.edu.pe/bitstream/uni/1597/1/quinones_rm.pdf ·...
TRANSCRIPT

UNIVERSIDAD NACIONAL DE INGENIERIA FACULTAD DE CIENCIAS
SECCION DE POST GRADO Y
2da ESPECIALIZACION PROFESIONAL
INTERPOLACION DE SUPERFICIES, SOBRE DATOS
DISIPADOS, MEDIANTE LA TRIANGULACION.
TESIS
PARA OPTAR EL GRADO DE MAESTRO EN CIENCIAS,
MENCION :
MATEMATICA APLICADA
PRESENTADO POR :
MARCO ERNESTO QUIÑONES ROBLES
LIMA - PERU
1998

Contenido
Introducción
1 Preliminares
3
5
1.1 Criterios para elegir un método ............................................................. 6
1.2 Método de
Shepard
................................................................................ 7
1.3 Método de Hardy .................................................................................. 14
1.4 Alcances de los métodos de
Shepard
y Hardy ........................................... 16
2
Triangulación
27
2.1 Criterios para comparar dos
tríangulaciones
para cuatro puntos ............. 28
2,2 Formas de
triangulación
........................................................................ 32
2.3 Relaciones entre el número de lados, vértices, triángulos y nodos del casco
convexo ............................................................................................... 39
2.3.1 Criterio para contar el número de lados k ..................................... 40
2.3.2 Criterio para contar el número de triángulos ................................ 42
3 Interpolación por
Splines
47
3.1 Superficies de
splines
con puntos disipados ............................................. 47
3.2 Interpolación
Bilineal
............................................................................. 47
3.3 Interpolación por
splínes
bicuadrátícos
.................................................. 53
3,4 Interpolación por
spline
bicúbícos
.......................................................... 66
3.5 Interpolación por
splines
de grado 5 sobre
triangulaciones
........................ 69
1

3.6 Alcances de los
Splines
bicuadráticos,
bicúbicos
..................... 70
4 Otros métodos 76
4.1 Métodos de
Renk-a
y
Chile
..................................................................... 79
4.2 Método de
Quak
y
Schumaker
................................................................ 93
4.3 Método
bivariante
C2 de
Glough—Tocher
................................................ 107
5 Evaluación Numérica 117
5.1 Comparación entre los métodos de
Shepard
y de Hardy ........................... 117
5.2
Triangulación
mediante la.
rutina.
de
Renka
............................................. 118
5.3 Comparación de los Métodos de Interpolación por
Splines
Híncales,
bicuadráticos,
Bicúbicos
........................................................................ 126
Bibliografía 13.1
2

Resumen
Este trabajo consta de cinco capítulos, en el primer capítulo tratamos sobre los
Métodos de Shepard y de Hardy, donde se utiliza mallas rectangulares para
graficar. En el segundo capítulo definirnos que es una triangulación y se tratan
los diferentes métodos de triangular. En el tercer capítulo tratamos sobre los
splines bilineales que requieren mallas triangulares. En el cuarto capítulo vemos
algunos métodos para calcular las derivadas parciales en los nodos que requieren
otros métodos de interpolación.

Introducción
Dado un conjunto de datos
(z,
y) disipados en R2 y su valor de función. El objetivo
principal de esta tesis es construir diferentes tipos de superficies que interpolen dichos
puntos.
El trabajo se ha dividido en 5 capítulos: En el primer capítulo trataremos los métodos
de
Shepard
y Hardy que requieren una malla rectangular. En el segundo capítulo definire-
mos qué es una
triangulación
y las distintas formas óptimas para triangular. En el tercer
capítulo trataremos sobre
splines
bilineales,
bicuadráticos
y
biciíbicos
requeriendo
una
malla triangular.
En el cuarto capitulo trataremos los métodos de
Renka
y
Cline
para poder aproximar
las derivadas parciales en los nodos que necesitamos como datos de entrada en la mayoría
de los métodos expuestos en los capítulos 1, 3 ,4 y 5 (por ejemplo, en el método de
Shepard
Quak
y
Schuma,ker,
Clough
Tocher).
En el capítulo 5 se compara algunos métodos de
triangulación
con los métodos de
Shep-
ard
y de Hardy, y se. da un ejemplo de la interpolación por
splines
bilineales,
bicuadráticos,
bical bicos.
La
triangulación,
inicialmente, nos sirve para encontrar una solución -única para el
poblema
de interpolación. Se trata de un mecanismo eficiente para resolver problemas de
puntos cercanos; como por ejemplo, encontrar los nodos más cercanos a un punto dado o
encontrar el circulo más grande que no contenga los nodos anteriormente mencionados.
Los métodos de
triangulación
tienen una variedad de aplicaciones, tales como: el
tendido de cables, facilidades de ubicación, la construcción de un polígono factible para
1
1
3

programación lineal con IV resticCifines, generación de una malla automática para un
triángulo basado en códigos de elementos finitos. También se pueden encontrar aplica-
dones en topología, planimetría, hidrología y cartografía.
La 'interpolación por superficies tiene aplicaciones en topograÉa para la construcción
de carreteras, medición de la temperatura> presión, etc.
4

Capítulo 1
Preliminares
En este capítulo definiremos algunos conceptos básicos que son útiles para la interpo-
lación de superficies con puntos disipados. Como algoritmos más simples para la interpo-
lación que no requieren usar una triangulación, usaremos en el Capítulo 3, los Métodos
de Shepard y de Hardy que nos servirán también para hallar el gradiente en cada punto.
Estos datos servirán para la interpolación cuadrática, cúbica y de grado 5.
Definición 1.1 Sean al, a2, • • • , a, en R3. Entonces x = E(tiai) donde ti + + tn = 1
y t, > O, es la combinación convexa de los puntos a l, a2,..., a„.
Los (4, i = 1, ,n forman los vértices del casco convexo.
Definición, 1.2 Sean ai,a2, an en 3, pi. E R, i = n. Se dice que x = E piel,: esí=.1
una combinación baricéntrica de puntos en R3 si pi +p2+...+pn = 1, donde Pi, P2, • • • , Pn
son llamadas coordenadas baricéntricas de x.
Las coordenadas baricéntricas no siempre son positivas. Si por lo menos alguna es nega-
tiva., el punto x está fuera del casco convexo.
Dados los puntos (xi, yi ), i = 1, n, con f(xi, !fi) = zi , i = 1, . ..,n. El problema
consiste en encontrar un polinomio iuterpolante y para esto, se distinguen métodos
!octles y globales. Según Franke

Cóncepto 1.1 Dado un conjunto de. puntos de datos. Se- habla de un método local, si
un cambio de datos (agregando, suprimiendo, o cambiando las coordenadas) cambiada la
función interpolan te sólo en puntos cercanos al punto de influencia.
Concepto 1.2 Dado un conjunto de puntos de datos, se habla de un método global, si un
cambio de datos (agregando, suprimiendo o cambiando las coordenadas) cambiaría toda
la furidjri interpolante.
Observación 1.1 Distinguimos métodos globales de locales en forma relativa, de los
datos, podemos escoger un subconjunto de estos datos, donde podamos utilizar un método
local o global. Un criterio sugerido por Franker51 es:
Si el conjunto de datos es moderadamente pequeño utilizaremos un método global, en
cambio si es excesivo utilizaremos un método local, ya que si cambiamos un dato para
hallar la nueva función interpelante tendríamos que resolver sólo sistemas de ecuaciones
que dependan de los vecinos del dato cambiado.
1.1 Criterios para elegir un método
Existen diferentes criterios para elegir un método. Los clasificaremos en importancia
descendente. Estos criterios deben ser comparados y además son subjetivos.
Precisión: Dada la función z f (x, y), el método debe describir las propiedades
de la superficie, tales como concavidad, máximos, mínimos, etc. Por ejemplo, si
nosotros estamos interpolando una esfera, al plotear los puntos deberíamos reconocer
que es efectivamente una esfera.
• Aspecto visual: La apariencia de la función interpolante z = f (r, y) es importante.
Lo más útil es representar la superficie en forma dinámica con diferentes ángulos de
vista.
• Sensibilidad de Parámetros: Entendemos por parámetro al valor que se expresa
como una constante en una ecuación. Los métodos de interpolación involucran uno
r- o
más parámetros o ninguno. Si Se elige los parámetros, estos dependerán indirec-
tamente de la. elección de un punto
(zrk,
yk)
y de las distancias de sus vecinos más
cercanos.
Algunos métodos son sensitivos al valor del parámetro, otros a las variables depen-
dientes, otros al valor
(xk,
yk);
por lo tanto
uu
conjunto de parámetros dará. buenos
resultados para una función y pobres para otros.
Cuando se perturbe el parámetro, es deseable que la función
interpelante
sea estable.
m•
.1.
lempo:
El tiempo en ejecutar el programa no es muy importante, a no ser que
a extenso.
Requerimientos de almacenaje: El esfuerzo de programación es importante, ya
que uno de sus objetivos es almacenar lo menos posible datos en la memoria.
Mediremos el almacenaje en términos de matrices agregadas para almacenar grandes
cantidades de datos, ya que los datos de entrada y salida los expresamos en términos
de matrices.
Los puntos
(rk ,
yk ,
zi,,)
son tomadas en cuenta como elementos de la matriz arreglo.
1.2 Método de
Shepard
En lo siguiente nos referiremos al trabajo de
Spaeth
[13]. Dados los puntos
yi),
i
=
1, n, con sus respectivos valores de función el problema consiste en hallar una
función
interpolarte
S
: s-1
R con
S(xí , = =
1,
.
Definición 1.3 Sea S R2
1--+
IR, la función básica del método de
Shepard
definida como:
w;
(x, y);
5(Z,
=
E r í=1
E
Wk (X ,
y)
k=1
donde
wk(x,y) dk
=
vi(x
—
xk )2
+
(y
—
yk)2 ,
q es un parámetro real, 4 es la
distancia de un punto del plano
XY
al nodo k.
7

Definiendo
11,;(z.,
y):
=
,:wit±)
Y)
y reemplazando en (1.1) tenemos E
ti,„(x,
y) k=1
A:1;y
y)
=
E
(x,
y))
í=1
donde:
1
=
7t.
q
(1.2)
dr k=
7i,
En la fórmula (1.2), multiplicando por
H
dr
el numerador y el denominador, tenemos:
r=I
dtiq
II
Gil
r
#1:
r
=
1
Vi(X)
n r=1 n n n (E
arre
cl)(11
dl)
E( fi cin
(1.3)
k=1
r=I
k=1 r
#
k,
r
=
1
01.kervación
1.2 La fórmula (L3) para el cálculo de S va a ser numéricamente más
estable
quela
fórmula (1.2), ya que cuando evaluamos en el punto
(xi,
y¿),
i E {1, n}
,
rol numerador de la fórmula (1.2) resulta 1/0, lo que no sucede en la fórmula (1.3).
Teorema 1.1 La función básica de
Shepard
tiene las siguientes propiedades:
1. S
w
un interpelante de
(xi,
i E {1,
...,
n}.
2.
Ví(X1
>
0.
- E
11/,(.
2
,
y1
=
1.
k=i
4. ruin
(.27,)
<
S(7,-,
y)
<
max
(ami)
5. Si
zi
>
O con i E {1,
,
71},
entonces
S(u.-,
y)
>
O.
G. Si;
=
e, E
{
1,
.
,
n}, entonces
S(x,
y)
=
c.

7. Las funciones y) son
infinitamente
diferenciables
excepto en los puntos pi
donde las derivadas parciales
ROn
de orden q
—
1, si q es un entero.
Si q
<
1 y q es un entero, entonces las derivadas parciales no existen en los nodos. as
Si q
=
2, entonces
—1Pi
=
—1Pi
=
O.
as Oy
as
Observación L3 Cuando q es igual a cero, la superficie es un plano cuya
ecuacion
es
=
(z1
z„)/n.
Sí q
=
2 la superficie S tiene la apariencia de una superficie llana en
la vecindad de
pi.
Prueba:
1. Por definición tenemos:
fi d
11 [(x
-
xr)2
+
(y
-
)2r/2
r #í
r
#
r
=
I r
=
1
14(r)
11) n
n
E(
II
(in
E[ [(x
- +
(y
-
yr)21q1
k=1
k=1 r k
r =1 r
=
1
H
[(x,
- (yí
-
yrrign
r
#
L
r
#
r
=
I r
=
1
Ví(Xí
N)
=
n n n n (1.4)
E(
II
E[
JJ
[(x.
-
z..)2
+
(y.
-
yr)21'11
k=1 k=1
r
#
k r# k r
=
1 r = 1
Asignando x
:=
xi ,
y
yi,
tenemos:
{(si
-
xr)2
+
(y;
-
y,-)2P/2
#
r # í r
=
1 r =
Li
(./i ,
Vi)
n E(
ñ
4) E[ u
[(zí
xr)2
+(yi
-
yr)219121
n n
'
(1.5)
k=l k=i
r k
r #
k
r
=
I
r
=
I
(.1

y
=
1
y Vi(xf y)—yL
n
s=1
i=1
ctO
k=1
#
1= 1
j
=
1
ta
=1.
d'O
í=1 # 1 = 1
donde i V- j. En (1.4):
Las sumas parciales del denominador resultan cero a excepción de la
productoria
cuando k i, entonces tenemos:
j
n
[(xt _xr )2 ±(yi
21412
r r =1
v,(7,_, = E(
fi
dl)
r r =1
=
1. (1.6)
xr) 2
+
(yi
-
)2r12
k=1 r r
r
=
1 r =1
En (1.5):
Si i j el denominador resulta cero a
excepción
del término
111(.7'i
zr).' Yr)2r/2
y el numerador resulta cero, entonces
ki)
=
(1.7)
En total resulta:
2. Trivial3.
S(X1.5
yt)
=
E
7kvk(rs,
ys.)
---
.7,i, k=1
i
=
1,
.
.
rt
ri
r r =1
Vt(Z)
Y)
=
n n
E( II
(5,7)
=
ic=1
rr
=
1
rc
II di:
ft
(
li
(I)
i=i
10

71.
(
"aún
zi)Vt()
min
z
t=1
ruin z; I
<
S(x,
Q.
mil! <
7.¡
< .= I,
...,r
(min
zi )1/i(x,
y)
V¡(x,
y)
<
(maxzi)1;,(x,
y)
Tomando
sumatorias
tenemos:
11-_,
E(
max
zi)Vi(x,
y) i=1
11
<
max
.z¿ IMr,
y)
t=1.
<
max
ze
-
I
—
(por (3))
5. Como z
>
O, tenemos
min >
> S(x, y) > 3. Utilizando (4):
ruin
c
<
(x, y)
<
max
c. Resulta c
<
S(x,
y)
<
c, entonces
sE,{1,—,n)
,n}
S(x.,
y)
=
c.
7.
Por definición. O
Otra propuesta de
ShepardrI3j,
es una interpolación de la forma:
fG
m (x, =
Dzi
(x
—
(y
—
yi )ziu ]Vi(x,
y),
donde las derivadas parciales
(zz „z y ,),
i
= ,
71,
son dadas.
Teorema 1.2 La función S1 de
Shepard
tiene las siguientes propiedades:
.7. S1 es un interpelante de
(x;,
y;), i E (1,
,
n}.
2.
V;(x,
y)
>
3
(,:r =
1,
k=1
4.
:nin
E{(1:
7:¡)Z,r
t=I
+ —
Y)
."5:
Si(r,
y) y
71.
(x,
y)
rnax
(2,:) — +
(y
—
y).
11

5. Si
,zí
>
O con
i
E
11,
...,
n},
entonces
S1(27,
y)
>
E[(7:—
z:;)z,.,+
(y
—
yí)zyjIli(27,
y).í=1
6. Si z;
=
c, i
{1,...,
n}, entonces
Si (x,
y)
=
c+E[(x
—
xí)zx ,-1-
(y
—
yí)zjifi(x,y).
7. Las funciones V
=
Ví(zr,
y) son infinitamente
diferenciables
excepto en los puntos
z í .
Las derivadas
parciales
son de orden q
—
1 si q es un entero. Sí q
<
1, q E Z,
entonces las derivadas parciales no existen en los nodos.
Si q a
=
2, entonces as,
=
z.,
y
ays,
Prueba:
1. Como Si (x,
=
S(x,
+E{(x
—
xi )z„
+
(y
—
yi )z„,]K(x,
y), evaluemos en el punto
(x&,
14)
(x;)
Yi)
=
Aziy
yi)
O
2. Demostrado en el Teorema 1.1.
3. Demostrado en el Teorema 1.1.
4. Por (4) del Teorema 1.1 tenemos
por el Teorema 1.1.
mí_n <
(x,
y)
<
max
íE{1,n}
1.11111 + 7[(x
— +
(y
—
yi)zyNdx,
y)
<
(x, y)
tE{i,„.,n}
(c,
y)
<
max +
E[(x )zz,
+
(y
yt )zyj17,(x,
y). í=1
5. Si
z,
>
O
=
min
zí
>
O en (4):
EU*
— +
—
yjzy,1Vi(x,
y)
z i
,1=1
<
Si (x, y)
(TI
?J)
>
E[(X
— +
(y
—
yi )z-vjVí(27,
y)
íaI
- + (y
—
Y%)zv.11/1(›
y)

6. Utilizando (4):
E[(z
— +
(y
- r_z
Si
(7-,
Y) Y
$=1
5"1(x.>
y)
<
e
+
V [(71 +
(y
vi(x>
y)
Si (x,
y)
=
e+
Eftx
— +
(y
—
14)zyjZ(x,
y).
i=i
7. Por definición.
Generalizando el método de
Shepard,
se tiene una interpolación de la siguiente forma:
E
tuk(:r,
y)Lk(x,
y)
F(x,
y)
=
k=1 fr.
E
tok(x )
y)
10=1
donde
un,(x,
y)
=
dr,
z
=
f(X,
y) y
Lk
es una función
nodal,
es decir:
Lk(xk,
yk)
=
zk,
k
=
1,
.
n y
yi)
=
O para i k, í E {1,
...,
n}.
Por ejemplo, para
t.1)k k=1
7.1)k
k=1
tenemos
Lk(x,
=
Z1,
S1
(x,
=
E
wk(x,
y)LLk(x, + —
k=1
Utilizando los polinomios de
Lagrauge
xk)
+
z„„
(y
—
yk)i/
E
wk(x,
y) k=1
para interpolar podemos calcular la siguiente
función
nodal:
(x-xr)
k
r= I
/4,
C 2,, y)
=
lt
(xk — .vr ) r
st-
k r
=
I
11 —
Yr
)
r
(yk
-
Yr) r
fr.
r
r
=
1
zk.
• La función
F(2
y) va a ser una función
interpolante
ya que
F(zk,
yk )
=
zk .
13

*
El método de
Shepard
puede ser usado
tambié`n
para la aproximación donde se busca
una función de la forma P(%,
a„,
x, y) donde a0,
a l ,
a„ son constantes a
ser encontradas, dichas constantes se encuentran al minimizar la
sumatoria
ponder-
ada de la diferencia de los cuadrados de P y el valor de función
zk
[zi,
-
P(au,
al,
• • •
an,
x,
Y)]2Wk(L)
Y),
donde
f."
es la combinación de funciones
mononiales
y
W4(x,
y) se puede escoger
como
dk-2
o
exp(-adDdk-2
u otros. (Ver
Franke
[5]).
1.3 Método de Hardy-
Dados 1043 puntos
=
1,
...,
n, con sus respectivos valores de la función
zi,
el
problema consiste en hallar una función
interpola.nte
H: R2 R con
R(x¡,
yi)
=
zi
i
=
...n..
El método de.
Hardy
(ver
Spaetb
[13])
es un algoritmo simple para la interpolación. Es
un método global, y no requiere
triangulaciones.
Definición 1.4 Sea S
:
R2
1-->
la
función del método de Hardy se define como:
(x )
y)
=
E
ak .Bh(x,
y),
donde los
Bk(x,
y), denotados por
Bk(r4),
dependen de
r4
=
((x
-
x4)2
+
(x
-
x4)2)1/2
que es la distancia del nodo k a cualquier punto del plano
XY,
y
ak,
k
=
1, n son
constantes a ser calculadas por las condiciones de interpolación corno veremos en los
ejemplos L5 y 1.6.
Obs.ervación
1.4 Las funciones
Bk{x,
y) son llamados funciones radiales y se recomienda
las siguientes funciones:
B,(x,
=
Mrk)
=
[(
-
2'k)2
+
-
/./k)2
±
Re*,
(rZ.
+
iirre
ln((rZ
+
Hi)q.),
donde R4, es un parámetro que no debe
ser muy grande,
qk
es otro parámetro dado.
14

• El método de
Sliepard
puede ser usado también para la aproximación donde se
bilsca
-una
función de la forma 'nao,
a l,
a„, x, y) donde
ao,
ai,
...,
a, son constantes a
ser encontradas, dichas constantes se encuentran al minimizar la
suinatoria
ponder-
ada de la diferencia de los cuadrados de F y el valor de función
zk
É[zil
-
nao,
di,
•
• •
,
an, 2",1i)]2Wk(r,
y),
donde F es la combinación de funciones
mononiales
y
Wk(x,
y) se puede escoger
como
dk-2
o
exp(-ad)dic-a
u otros. (Ver
Franke
[5]).
1.3 Método de Hardy
Dados tos
puntos
(xi,
yi),
i
=
1,
...,
n, con sus respectivos valores de la función el
problema consiste en hallar una función
interpola.nte
H:R2
R con
R(xi,
yi)
i
=
3,
...
n.
El
u-iétodo
de
Hardy
(ver
Spaetb
[13]) es un algoritmo simple para la interpolación. Es
un método global, y no requiere
triangulaciones.
Definición 1.4 Sea S
:
R2 H R, la función del método de Hardy se define como:
H
(T,
y) E al,
Bk(x,
y),
1c=1
donde los
Bk(x,
y), denotados por
Bk(rk ),
dependen de
rj,
=
((x
_
zi,)2 -
zo2)1/2
que es la distancia del nodo k a cualquier punto del plano
XY,
y
ak,
k
=
1,
,
n son
constantes a. ser calculadas por las condiciones de interpolación como veremos en los
ejemplos
1,5
y
Le.
Observación 1.4 Las funciones
Bk(x,
u) son llamados funciones radiales y se recomienda
las siguientes funciones:
Bk(x --=
B(rk)
=
[(x
xk)2
+
—
yk)2
±
ni",
Éfrk)
=
(rZ.
+
Ri)q*
In((rZ
+
Ri)q*),
donde
14
es un parámetro que no debe
ser muy grande,
yk
es otro parámetro dado.
14

La
funcirin
"^k)
= +
Rirk
ln((ri
+
Rt)lk)
se comportará de acuerdo a los valores de
B( rk)
=
[rit
+
R.2•14 .
Si los valores de
B(rk)
están entre cero y 1, la función
B(rk)
ln(B(rk)
será negativa y su gráfica se verá ovalada hacia arriba, en cambio si
B(rk)
>
O la función
B(rk)ln
B(rk)
se comportará en forma creciente.
Teorema 1.3 El método de Hardy tiene las siguientes propiedades:
I.
H es un interpelante de
(zi,
i n}.
2, La función
Bkisx,
y) es
invariante
con respecto a la traslación y rotación.
3. La matriz del sistema de ecuaciones para hallar
ak
es una matriz simétrica.
Prueba:
1. Por definición de
Bk(x,
y), se elige los coeficientes a de tal manera que H
(x,
y) es
interpolarte.
2. Inicialmente utilizamos el siguiente cambio de coordenadas (traslación) = x
—
xk
9=
y
—
yk.
Luego,
rotando
el sistema de coordenadas nuevas, tenemos
xt=
rccoso
—
9sent9 =
5sene
+
flama
Asignando a
:=
x',
y
:=
y reemplazando en la función
Bk
podemos verificar que
la función no varía, luego concluimos que la función
Bk
es
invariante
con respecto
a la traslación y rotación, ya que reemplazando á
=
x.
—
xk
j
=
y
—
yk
tenemos:
Bk(i,•fj)
[Ci2
+
fj2
RIY4.
Ahora teniendo en cuenta que
Rk
no dependen de x e
y tenemos:
icos9
—
5seng, =
"sen0
+
9cose,
elevando al cuadrado ambas ecuaciones y luego sumando y simplificando, se llega
x'2
+ =
x2
+
b2.
Reemplazando en
Bk(I,
p)
se tiene:
FUI,
5)
=
[(x'2
+
y'2
+
y asignando r
:=
x' y
:=
y' tenemos que
Bk(x,
y) no
varia.
15

91-
3. Por definiciorn de H y B, ya que , y) = E ak Nrk) es una función interpolante
k=I y por B(r,f,) — 3702 + (y — y
h )2 + se plantea el siguiente sistema lineal:
arB =
donde B =
,2 2r
Bik = [Gr'i xk)2 R
k •
Luego se concluye que B es una matriz, simétrica ya que Bík = Bkí. En forma análoga
se puede demostrar que B es simétrica cuando B(rk) = (T.?, + R2)9 In(rk + le)q. O
Para la elección de Rk, Hardy [13] recomienda:
V
2
= ( — 10
rnax(rnax;,/, — xkl — ?!k
l))
1.4 Alcances de los métodos de Shepard y Hardy
• La diferencia entre el método de Hardy y Shepard está en sus curvas de nivel, en
el método de Hardy la mayoría de curvas son ovaladas, ya que cuando hallamos
ssls curvas de nivel, resultan estár compuestas por la suma de funciones circulares
en forma lineal; en cambio en el método de Shepard también están compuestas por
funciones circulares pero no de forma lineal.
Ambas funciones siempre dependen del parámetro q.
* Para resolver ambos métodos se plantea sistemas de ecuaciones lineales de n ecua
clones con n incógnitas, donde n es el número de datos y cuando n no es muy grande,
el sistema planteado es factible de resolver.

igura, 1.1:
Punctilli
de
shepard
para el Ejemplo 1.1

ETérnpló.
1.1
Dados
/os puntos
(2:1
, =
(3, 6),
( 2)
y2
de
funcicírr
z i
=
1,
%:!2
=
5.
Encontrar la
funcídn
de
Shepard
y su gráfica.
6) y sus respectivos valores
Solución:
La. función de
Shepard
está. dada por:
r r
=
1
= i ;(2 )
11)1 Vt() =
n „
t=1
E(
1-1
k=1 r
#
r
=
1
para nuestro caso tenemos n
=
2, q
=
2.
C.,‘,alculeulos
171,
V2:
—
6)2
+
(y
—
6)2
(
—
6)2 + (y
—
6)2
+
(x
—
3)2
+
(y
—
6)2 (x
—
3)2
+
(y
—
6)2
-
6)2
+
-
8)2
+
—
3 )2
+
(Y 6 )2 1[(
—
(3)2
+
(y
—
6)21
Se comprueba:
(x
—
6)2
+
(y
—
6)2
+
(x
—
3)2
+
(y
—
6)2
5{(x
—
3)2
+
(y
—
6)21
(x
—
6)2
+
(11
—
6)2
+
(x
—
3)2 +(y — 6)2 '
5(3, 6)
=
1, 5(6, 6)
=
5
=
5 es un
interpolante,
5
(.2:,
y)
1>
o, i e {1, 2}, E
14(X,
y)
=
1, 1
<
S(x,
y)
<
2
y como
tiR
>
O
=
$(x, y)
>
O y también como q
=
2
=
P O,
2— ,.
O, i E {1,2}
ay
En la figura
1. -.1
se observa que el
m'in
S(x,
y)
=
1,
m.ax
S(
x,
y)
=
5, la gráfica está
encima del piano z
=
O
y por
los
puntos (3, 6, 1) y (6, 6, 5) podemos hacer pasar un plano
paralelo al plano z
=
O.

O
Figura 1.2.
Fanctón
de.7)tiepard
para
el Ejemplo 1.2

E'jemplo 1.2 Dados los puntos ( 2'11Y1) = (0, 2 ), (x2, y2) = (0 , 5), (x3, ya) = (2, 0),
et4 , y4) = (3, 4), (y:5, Y.5) = (4, 10), (z:6, ye) = (5, 0), (Y:7, Y7) = (6, 7), (z8, yrt) = (8, 3),
(1;9, 10, 2), (x io, y io ) = (10, 9,) y sus respectivos valores de función z1 = 1, z2 = 2,
= 4, = 7, z.6 4, z7 6, zt, = 5, z, 6, ziu = 4. Graficar la función de Shepard S.
Solución:
En la figura 1.2 se observa que ruin 5(x, y) = 1, max S(x, y) = 7, la función S es una
función iuterpolaute, y para los puntos (xi, yi, i E {1, n} podemos pasar un plano
paralelo al plano Y = 0.
Ejemplo 1.3 Dados los puntos (X L , y.) = (3, 6), (x2 , y2 ) = (6, 6) con sus respectivos
valores de función z1 = 1, z2 = 5, q = 2 y también zx l = 1, = 1, zx 2 = 1, = -1.
Encontrar la función de Shepard
So!ución.:
La función de Sliepard S1 está dada por: n.
Si(x, = 7[z, +(x- x,)zr, + (y - y,)4„jizt(x, y),s=1
para nuestro caso n = 2, y = 2. Calculemos Vi , V,:
(x - 6)2 +(i/ 6)2
- 3)2 + (y - 6)2 ( x - 6)2 + (y - 6)2 + (x - 3)2
+(y- 6)2 1[(x - 6) + (y - 6)2 ]
5[(c - 3 )2 + - 6)21 _ 6)2 - 6)2
+ _ 6)2 + + (y - 6)1[(x
_ 3)2 ± (y 6)2
- 3)1 + (y - 6)1]
±[( 2' - 6)2 - 3 )
+ (y - 6) 2 + (x - 3)2 + (y - 6)2
+ - 6 ) 2][( 2' - 6)1 + - 6)(-16 )2 +(y -3)2 + " 3 )2 + -6'
Observación 1.5 En la figura 1.3 se observa que S c es un in' terpolante y a diferencia del
Ejemplo 1.1 trazamos planos tangentes a los puntos (3,2, 1) y (5, 4, 2), estos planos en
20
V I z, y)
V2(x, -
S1(x, y) = - 6)2 + - 6)2 + (x - 3)2 + (y - 6)2

lo
ip,13.ra,
L3
1.'uncióin
de
Shepard
51 para el Ejemplo 1.3

lo
Figura L4:
Funci4h
de
Shépard
Si
para el Ejemplo 1,4
22

este caso no serán paralelos al plano z
=
O,
mas bien las normales de dichos planos serán
paralelas a (1,1, -1) y (1, -1, -1).
Ejemplo 1.4 Dados los puntos
(=L'
Y')
=
( 0 , 2 ), (x2, y2)
=
(0,5), (x3, y3)
=
(21
0),
(x4,1/4)
=
(3, 4),
(xs,
Ys)
=
(4, 10), (x6, Y6)
=
(5, O), (DT, 1/7)
=
(6, 7 ),
(xs,
Ya)
=
(8, 3),
(xo,
yo)
=
(10, 2),
(xio,
Vio)
=
(10,9) y sus respectivos valores de función z1
=
1, z2
=
2,
z3
=
4, z5 =7, z6 =4, z7
=
6,
z8
=
5,
zg
=
6,
zio
=
4 y también
(za,,,
z y ,)
=
(1, 1),
i = 1,
.
.
,
5,
(z„,
zv ,)
=
(-1, 1), i 6,
..
,
10.
La función
interpolante
de
Shepard
para q
=
2, se ve en la figura 1.4.
Solución:
En la figura 1.4 se pueden construir 5 planos tangentes cuyas normales son paralelas al
vector (1, 1, -1) y 5 planos tangentes cuyas normales son paralelas al vector (-1, 1, -1)
a
f
debido a que cuando g
=
2 se tiene
a
f
=
z„, =
z y„
á E {1,
.
.
.
,
10}, también se
ayi
observa que la función es una función
interpolante.
Ejemplo 1.5 Dados
(xi,Y1)
=
(3, 6), (x2, V2)
=
(6, 6),
zl
=
1, z2
=
5, q
=
-1, R
=
1.4.
Hallar la función de Hardy S donde
B(rk)
= Riq
.
Solución:
La matriz de Hardy está dada por:
B
=
[B(i,i)12x2
tal que
B(i,
j)
=
((xi
-
xj)2 - yi)2
R2r
B
=[
0.5102
0.0912
0.0912 0.5102
23

lo
Figura 1.5. Función de Hardy para el Ejemplo 1.5
24

Para
hallar 8 se plantea el siguiente sistema:
aB
=
z
aT
--=
zT
*
13'
aT
=
[
1 5 1
*
2.0248 -0.3621
-0.3621 2.0248
aT
=
(0.2143 9, 7617) 2
=
E
akB(rk)
=
aiB(ri)
+
a2B(r2)
k=1
S
=
0.2143[(r
-
3)2
+
(y
-
6)2
+
1.96]-1
+
9.7617Rx
-
6)2
+
(y
-
6)2
+
1.961-1
La función de Hardy se ve en la figura 1.5.
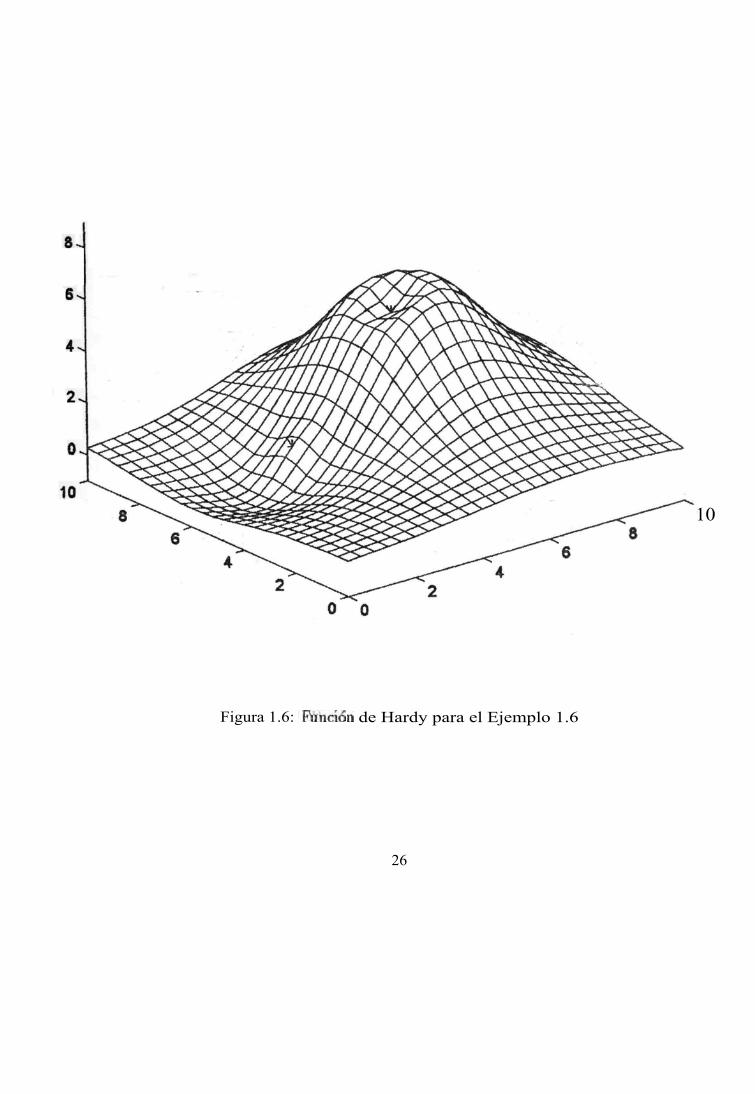
Ejemplo 1.6 Dados
(xi,Yi)
=
( 3 , 6 ), (x2, Y2)
=
( 6 , 6 ), z1
=
1, z2
=
5, q
=
-1, R
=
1.4.
Hallar la función de Hardy S donde
B(rii )
=
(rj2,
//2)q1n(r12,
+
R2)4/
Solución La matriz de Hardy está dada por: B
=
[B(i,
j)]2x2
tal que
B(i,
j)
=
((xí
-
xj)2
+
(N
-
yi)2
R2r1n
((xi
-
xj)2
+
-
yi)2
R2)q
.
Reemplazando
datos tenemos: -0.3433 -0.2185
B= -0,2185 -0.3433
Para hallar S se plantea el siguiente sistema:
aT
B
=
zT
zT
*
B-1
aT
=
-4.8937 3.1137
3.1137 -4.8937
aT
(10.6746 -21.3547) 2
S
=
E
al„B(rk)
=
al
B(r1)
+
a3/3(r2)
k=1
S
=
0.2143[(x
-
3)2
+
(y
-
6)2
+
1.96]-1
+
9.7617[(z
-
6)2
+
(y
-
6)2
+
1.961'
La figura 1.6 muestra el gráfico correspondiente.
25
26
Figura 1.6:
•Ftinció-U
de Hardy para el Ejemplo 1.6
10

Capítulo 2
Triangulación
El objetivo del Capítulo 2 es la triangulación, que nos permite generar una función
única para la interpolación. Para esto definiremos lo que es una triangulación, presentamos
criterios para comparar dos triangulaciones con cuatro puntos y luego generalizaremos
estos criterios para n > 4 puntos. También daremos criterios para contar el número de
lados, triángulos, vértices y las relaciones entre ellos.
Definición 2.1 (ver Hoschek/Lasser[7]) Dado el conjunto de puntos
p, = y,), i E {1,...,N}} en el plano XY y sea T = (ai , 13 j , -O, 1 < ay < N,
1 < fi, < N, 1 < < N, (cti,i3i,yi) EN xNx N, N < o°. T define una triangulación si:
1. Para cada j E {1,... , M} los vértices son los vértices de un triángulo
Ti •
2. Cada triángulo es definido exactamente por tres puntos de p que son vértices de este
tnángulo.
3. n T3 = 0, paras .j.
4. La unión de los triangulos Tk, k E {1,..., N} es un casco convexo'.
'Casco convexo es un conjunto convexo formado por la unión de triángulos
27

Ejemplo 2.1
No es una triangulación Ea una triangulación
2.1 Criterios para comparar dos triangulaciones para
cuatro puntos
Presentamos algunos criterios para la triangulación, dado que existe la posibilidad de
triangular de diferentes maneras para un conjunto de puntos. Con estos criterios tratamos
de encontrar una mejor triangulación optimal. Diremos que una triangulación es mejor
cuando los triángulos más agudos o más obtusos han sido descartados. En lo que sigue
trataremos los criterios encontrados en Hosdiek/Lasser[7].
1. Criterio del Max-Min del ángulo La triangulación T de cuatro puntos es mejor
que la triangulación t si amin,(T) > donde:
ami,,(T) = min Icc(Ti ) : Ti E T, j E {l,2}},
cy,‘„(i1) = min : tk E t, k E {1,2}}
y a(T5) es el ángulo más pequeño del triángulo T5 , Ti E T, j E {1, 2}, ce(ilk) es el
ángulo más pequeño del triángulo t., k E {1, 2}.
28
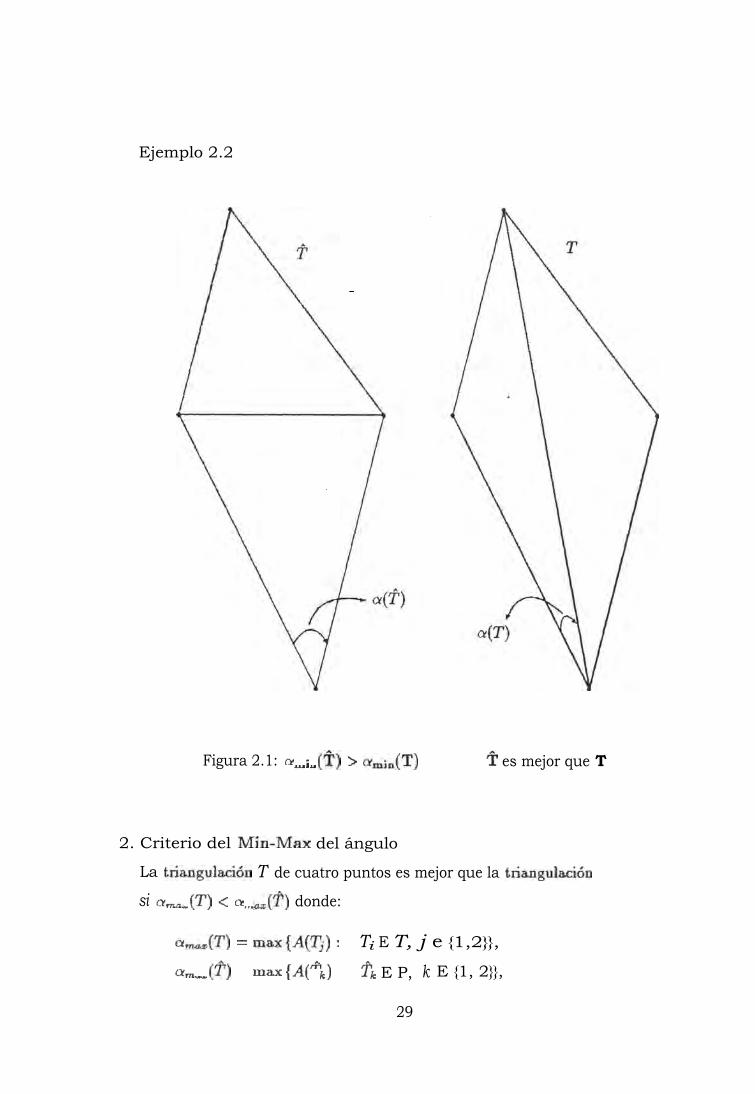
Ejemplo 2.2
Figura 2.1: cymin(t) > cx.i.(T) 't es mejor que T
2. Criterio del Min-Max del ángulo
La triangulación T de cuatro puntos es mejor que la triangulación
si cr,„,z(T) < nm,„,(7) donde:
a,,(T) = a,ax(7)
max{A(Ti) : Ti E T, j e {1,2}},
max {A(11) tk E P, k E {1, 2}},
29

y A(Ti) E
IT; es el ángulo más grande del triángulo fi,
Tri E T, j E
II, 2};
A(t) es
el ángulo más grande del triángulo tk,
k E 11,
2 j
.
Ejemplo 2.3
Figura 2.2: a.(t)
<
am (T) 't
es mejor que T
3. Criterio de la diagonal más corta
La triangulación
T de cuatro puntos es mejor que la triangulación
t
si d <
ci
donde
30

Pi
d = pipk, d = pipi son las diagonales del cuadrilátero cuyos vértices son los nodos
de la triangulación.
Ejemplo 2.4
pt
Figura 2.3: a d T es mejor que
4. Criterio del círculo
Dado cuatro puntos que forman un cuadrilátero, la triangulación T se forma al trazar
31

una dé las diagonales del cuadrilátero, de tal forma que los círculos circunscritos en
cada uno de los dos triángulos formados no contengan el otro vértice del cuadrilátero
en su interior. Podría darse el caso en que el vértice caiga en la circunferencia; en este
caso la triangulación T ya no seria única debido a que existirían dos triangulaciones
posibles.
Comparación de los criterios
Definición 2.2 Una triangulación T es localmente óptima, si cada cuadrilátero formado
por un par de triángulos, cumple un criterio anteriormente dado.
Ejemplo 2.5 (ver Hoschek/Lasser[7])
• Ambas triangulaciones son localmente óptimas por el criterio del miu-máx.
2.2 Formas de triangulación
Para comparar dos vectores utilizaremos el criterio lexicográfico. Dados dos vectores
de las triángulaciones T y t, definidos por a(T) (ah a2, , an), con los ángulos más
32

pequeíiosjgrandes en cada triángulo, y a(i) = • • • , éTé,,YDiremos que a(T) .< a(l
si existe algún k E N tal que aí = rn para 2, .. , k— I} y cri < ai para i E {lc, n}.
Definición 2.3 (ver Hoscheck/Lasser[7]) Dados los ángulos ati y ai como compo-
nentes de los vectores a(T) y a(P) que cumplen con un criterio anteriormente dado.
Entonces una triangulación T de un conjunto de puntos es globalmente óptima si
a(T) > a(T) ó a(T) < ce(i4 ) para cada triangulación T de p
1. Criterio lexicográfico maxmin Para cada triangulación T sea el vector a(T =
(a1, a2, , at), aquel cuyas componentes están ordenadas en forma creciente, cij es
el menor ángulo del triángulo Ti, j E t el número de triángulos.
Entonces diremos que la triangulación T r es mejor, si a(T r) es mayor o igual que
todos los a(T'), i r.
2. Criterio lexicográfico minmax
Para cada triangulación T , sea el vector A(T (A1 , ./42, . A1), cuyas compo-
nentes están ordenadas en forma decreciente, k es el mayor ángulo del triángulo j,
j E {1, . . . , 1}, 1 el número de triángulos.
Entonces diremos que la triangulación T r es la mejor, si A(T r) es menor o igual
que todas las A(T i r.
Ejemplo 2.6 Mostramos las tres posibles triangulaciones {T }.=, asociados con los pun-
tos siguientes:
Pl = (-2,3), Pa = (1,5), P3 = (3, 2), P4 = 0), P5 = (0, 3)
3 3

Por el criterio lexicográfico, la. distribución de vectores asociados con estas diferentes
triangulaciones son:
Max-Min ángulo Min-Max ángulo
a(T 1) = (0.53, 0.59, 0.67, 0.91) A(T = (2.02, 1.57, 1.48, 1.25)
a(T 2 ) = (0.20, 0.53, 0.59, 0.78) A(T 2) = (2.79, 2.02,1.57,1.43)
a(T = (0.14,0.53,0.66,0.78) A(T 3 ) = (2.79,2.02,1.57,1.43)
Comparando los vectores a(T ) correspondiente al criterio lexicográfico del max-miu te-
nemos:
i) a(T 3 ) < a(T 2 ) < a(T 1)
Entonces T 1 es la mejor triangulación.
ii) A(T 1) < A(T 2 ), A(T < A(T
Para este caso no podemos aplicar el criterio lexiográfico del min-max.pem
podriamos escoger A(T 1 ) porque es menor que A(T 2 ) y A(T 3 ), la cuál sería la
-única alternativa para este criterio.
34

Observación 2.1 (ver Niel'•on/Frankelll]) Los métodos de tríangidación del max-
ruin y el min-max difieren a lo más en algunos triángulos en el orden del 10% como lo
muestra en el siguiente gráfico:
MAX-MIN TRIANGULACION MIN-MAX TRIANGULACION
3.Triangulación de Thiessen
Para entender qué es una triangulación de Thiessen (ver Cfine/Renka [2]) definamos qué
es un lado localmente óptimo de un triángulo en una triangulación T.
Definición 2.4 Un lado de un triángulo en una tríangulación T es localmente óptima si
y sólo si:
1. Dicho lado pertenece a la frontera del casco convexo o,
2. el lado está en el interior del casco convexo y es la diagonal de un cuadrilátero
aplicando el criterio lexicográfico del Max-Min o el criterio del círculo.
Se dice que el cuadrilátero con el lado dado forma una triangulación T localmente
óptima.
35

Definición 2.5 Una tríangulación es de Thiessen cuando todos los lados de cada
triángulo de una triangulación T son localmente óptimas.
Para su construcción definamos los siguientes conceptos:
Definición 2.6 Sea pi un nodo de la tríangulación. Definimos como Fi la región (el
polígono) de Dirichlet (también Thiessen, Voro.uo0 asociada al punto pi, como la clausura
de todos los puntos más cercanos a pi que a cualquier otro nodo pi, i # j.
Expresado matemáticamente:
1x e R2/ d(x, pi) 5_ d(x, pi), i j},
donde des la distancia euclideana; pi, pi nodos.
Definición 2.7 Sean Fi y F,.i # j, regiones de Dirichlet, asociadas a los puntos pi, pi
respectivamente; entonces, si n Fi y la intersección es un conjunto que tiene más
de un elemento, diremos que pi y pi son vecinos fuertes. En cambio, si la intersección
es el conjunto unitario, diremos que pi y pi son vecinos débiles. Este último caso se
genera cuando 4 puntos o más pertenecen a una circunferencia, porque el centro de la
circunferencia es un vértice de un polígono de Dirichlet.
P4
P2, p4 son vecinos fuertes
36
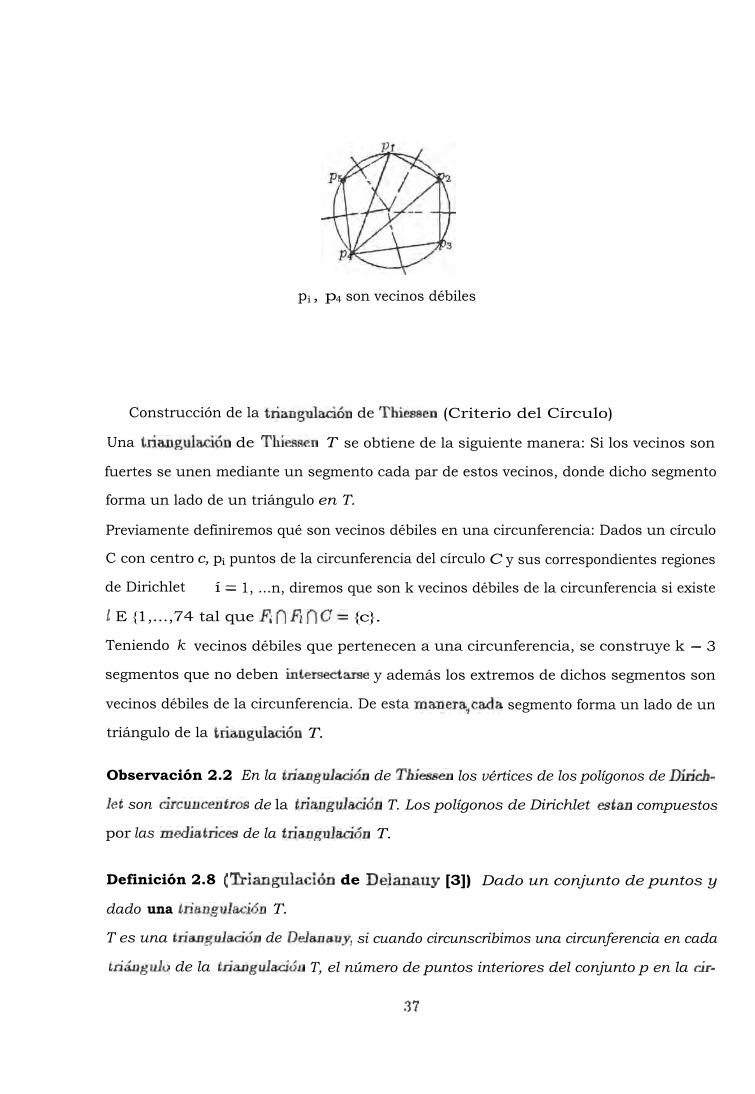
pi, p4 son vecinos débiles
Construcción de la triangulación de Thiessen (Criterio del Círculo)
Una triangulación de Thiessen T se obtiene de la siguiente manera: Si los vecinos son
fuertes se unen mediante un segmento cada par de estos vecinos, donde dicho segmento
forma un lado de un triángulo en T.
Previamente definiremos qué son vecinos débiles en una circunferencia: Dados un círculo
C con centro c, pi puntos de la circunferencia del círculo C y sus correspondientes regiones
de Dirichlet í = 1, ...n, diremos que son k vecinos débiles de la circunferencia si existe
/ E {1,...,74 tal que FinFine= {c}.
Teniendo k vecinos débiles que pertenecen a una circunferencia, se construye k — 3
segmentos que no deben intersectarse y además los extremos de dichos segmentos son
vecinos débiles de la circunferencia. De esta manera,cada segmento forma un lado de un
triángulo de la triangulación T.
Observación 2.2 En la triangulación de Thiessen los vértices de los polígonos de Dirich-
let son circuncentros de la triangulación T. Los polígonos de Dirichlet estan compuestos
por las mediatrices de la triangulación T.
Definición 2.8 (Triangulación de Delanauy [3]) Dado un conjunto de puntos y
dado una triangulación T.
T es una triangulación de Delanauy, si cuando circunscribimos una circunferencia en cada
triángulo de la triangulación T, el número de puntos interiores del conjunto p en la cír-
37

cunferencía es cero y sólo tres puntos del conjunto p que son los vértices del triángulo
pertenecen a dicha circunferencia.
Observación 2.3 Dado un conjunto P de puntos. En ambas tríangulaciones de Delaunay
y Thíessen se aplica el criterio del círculo o el criterio lexicográfico del Max-Mín.
En la triangulación de Delaunay hay una restricción que consiste en que por cada tres
vértices de cada triángulo se puede circunscribir una circunferencia que no contiene más
que estos tres puntos del conjunto P. En cambio en la triangulación de Thíessen no hay
restricción para la circunferencia, es decir a dicha circunferencia pueden pertenecer tres
o más puntos. Se concluye que la Triangulación de Delaunay es un caso particular de la
Triangulación de Thiessen.
Mostraremos los siguientes 2 gráficos:
Ejemplo 2.7
Figura 2.4: Polígono de Dirichlet asociada con la triangulación de Delanauy.
En la figura 2.4 mostramos la triangulación de Thiessen que también es una Triangu-
ladón de Delaunay debido a que si nosotros circunscribimos una circunferencia en cada
38

triángulo, la circunferencia contendrá solo sus tres vértices. Además, observamos que el
centro de cada circunferencia son vértices del polígono de Dirichlet.
Figura 2.5: Triangulación de Thiessen y sus respectivos polígonos de Dirich-
let.
En la figura 2.5 mostramos la triangulación de Thiessen que de antemano no es una
triangulación de Delaunay debido a que en cuatro puntos del conjunto P podemos cir-
cunscribir una circunferencia. Para dichos cuatro puntos tenemos la opción de triangular
de dos diferentes maneras.
2.3 Relaciones entre el número de lados, vértices,
triángulos y nodos del casco convexo
Dada una triangulación T cualquiera, nos interesa encontrar una relación geométrica
del número de lados k de todos los triángulos con el número de nodos en la frontera del
casco convexo rz,. y también encontrar una relación entre el número de triángulos NT con
el número de nodos en la frontera del casco convexo.
39
Estas fórmulas serán demostradas por inducción y por el criterio de Poincaré.
2.3.1 Criterio para contar el número de lados k
Sea k el número de lados, n = número de puntos de interpolación, n,. = número de
puntos de frontera del casco convexo, ni el número de puntos de interpolación interiores.
El número de lados k deducimos de de la siguiente manera (Figura 2.6): De cada punto
de la frontera del casco convexo construimos tres vectores uno que parta al interior del
casco convexo y dos que partan a sus nodos vecinos en la frontera, así tenemos: 3nr — nr
vectores que se identifican como una suma parcial del número de lados.
Despues de cada. punto interior construimos tres vectores que partan de cada nodo interior
del casco convexo pero que no se encuentren con los vectores que tuvieron su origen en
la frontera del casco convexo; esta construcción se puede desarrollar con excepción de un
nodo. Luego el número de lados será 3 * — 1).entonces tenemos:
= 3 ra, — n,, -1- 3(% —1)
k = 3n — 3 — ny.
Observación: Está relación tambien es válida cuando se tiene algunos puntos en linea
recta.
Esta relación esta dada por Spaeth [13], la enunciaremos y demostraremos mediante el
siguiente teorema:
Teorema 2.1 Dado T una tríangulación, NT número de tríangulos, n,. número de podas
del casco convexo. Entonces se cumple:
k 3n — 3 — n,.
Prueba: Por inducción:
(a) Para. n 3 tenemos.
3(3) — 3 — 3 = 3
40

(b) Supongamos que para el caso n > 3 la, afirmación es cierta: k = 3n — n.y. — 3.
(c) Veamos para el caso n+ 1 Si el punto agregado pertenece al interior del casco convexo,
entonces el número de lados aumenta en tres, es decir
k = 3n — TL r - 3 + 3.
entonces
k=3(n+1)—rLr -3.
como antes
Si ei punto agregado pertenece al exterior del casco convexo existen dos posibili-
dades:Si ni. aumenta en 1, el número de lados aumenta en 2.
k = 3n — 74. — 3 + 2 = 3(n + 1) —(n, + 1) — 3.
Si aumenta, el número de lados aumenta en 3.
k. = 3n — n,. — 3 + 3 = 3(n + 1) — nr. —
Ejemplo 2.8 n = 9, n,. = 5, ni = 4.
3
Figura 2.6: Criterio para contar el número de lados.
41

Tenemos k = 3(9) 3 — 5 = 19.
2.3.2 Criterio para contar el número de triángulos
Sea k el número de lados, n el número de puntos de interpolación, n,. el número de
puntos de frontera del casco convexo, NT el número de triángulos, ni el número de puntos
interiores. El número de triangulos NT deducimos de la siguiente Figura 2.7: De cada
nodo de la frontera del casco convexo podemos construir dos vectores de tal manera que
al contabilizar los triángulos mediante estos vectores tendríamos, el número
2(n — ni) — n,. = 2n,. — n,. = n,.
Ahora de cada nodo interior sólo tracemos dos vectores que tengan su origen en cada
nodo, y cada vector este contenido en un solo triángulo; de esta manera dada la condición
se cumplira para todos los nodos interiores a excepción de un nodo; luego el número de
triángulos a. contabilizar con los vectores que. tienen origen en los nodos interiores será:
2(ni — 1).
El total de triángulos en la triangulación T es entoces:
= 2(n — ni) — + 2(ni — 1)
es decir:
NT = 2n — — 2
Observación: Esta relación es válida cuando se tiene algunos puntos en linea recta
Esta relación esta dada tambien por Spaeth[13], lo enunciaremos y demostraremos medi-
ante el siguiente teorema:
42

Teorema 2.2 Dado una triangulación T, ?IT sea el número de tríangulos, n,. el número
de nodos de la frontera del casco convexo. Entonces se cumple:
/VT = 2n — — 2.
Prueba: Por Inducción
1. Para n = 3 tenemos:
NT = 2(3) — 3 — 2 = 1, es decir la fórmula se cumple.
2. Supongamos que la afirmación es verdad para n :
NT == 2n — — 2
3. Veamos para el caso n + 1
Agregamos un punto en el casco convexo; si el punto pertenece al interior del casco
convexo, ya sea que pertenezca a un lado, entonces la triangulación aumenta en dos
triángulos. Resulta:
NT = 2n — — 2 + 2 = 2(n + 1) — nr. —2.
Entonces la afirmación es correcta para este caso.
De otro lado, si el punto agregado está en el exterior y si el número de la frontera
del casco nuevo formado no aumenta, entonces el número de triangulos aumenta en
2. En este caso tenemos:
NT = 2n — — 2 + 2 = 2(n. + 1) — ny. — 2,
y la afirmación es también correcta.
Al final, sí el número de nodos de la frontera del casco convexo aumenta en 1 el
43

numero de triángulos aumenta en 1 y tambien se cumpliria lá al-ir:Mac:m/n por
NT = 2n — —2+1 = 2(n, + 1) — (nr + 1) — 2.
Ejemplo 2.9 Dados n = 13, n,. = 8
Figura 2.7: Criterio para contar el número de triángulos.
NT = 2(13) — 8 — 2 = 26 — 10 = 16
Otra forma de demostrar estos últimos resultados fué desarrollado por Delaunay uti-
lizando la fórmula de Poincaré que enunciarnos en el siguiente teorema:
Teorema 2.3 La relación entre el número de regiones r de Dirichlet, número de vértices
n, .rnimem de lados k en un plano está dada por
r + n, — k = 2.
Prueba La demostración se realiza por inducción sobre r, sobre n, o sobre k. Sólo
desarrollaremos la prueba por inducción sobre r:
44

1. Pala r = 2 tenemos:
2 = k — n + 2 luego k = n, es decir, la fórmula se cumple.
2. Supongamos que la afirmación es verdad para r, esto es:
r = k — n + 2
3. Veamos para r 1: Si las regioneshan aumentado en 1 quiere decir que a aumentado
un lado es decir:
(r+ 1) = (k + 1)— n+ 2)
Entoces la afirmación es correcta para este caso.
Delanauy se da cuenta que al multiplicar el número de triángulos por 3, el número de lados
se duplica a excepción de los lados en la frontera del casco. Expresado matemáticamente
sena:
2k — nr = 3NT (2.1)
Por otro lado, utilizando la fórmula de Poincaré dada la triangulación T resulta:
r= NT + 1,
n = n, 3NT + rt,-
2 k
Reemplazando en la fórmula de Poincaré tenemos:
3NT 127 NT +1-1-n ( ) =.2.
NT = 2n — n,. — 2,
2k — 71r = 3(2n — rzr — 2).
k = 3n— nr — 3.
(reemplazando en (2.1)
45

Teorema 2.4 ( Ver Si.jaeth (131)Dados el idirbero de triángulos NT y el número de lados
k y el número de Dados n, se cumplen las siguientes relaciones:
I. n — 2 < NT < 2n — 5,
2. 2n — 3 < k < 3n — 6.
Prueba:
I. Sabemos que NT = 27i — — 2
NT = (n — 2) (n — n.,.) y mino n > n, y n > 3 (por definición), entonces:
NT > n — 2.
Por otro lado:
t1r > 3 —nr < —3 — 2 < —5
2n —n, — 2 < 2n — 5 NT < 2n — 5.
2. Sabemos que k = 3n — n,. — 3
k = (2n, — 3) (n — nr ) y corno n > ni. y n > 2 —3
k > 2n — 3.
Por otro lado:
n,. > 3 —nr < —3
3n — 3 — nr < 3n — 3 — 3 k < 3n — 6. CI
4(3

Capitulo 3
Interpolación por Splines
3.1 Superficies de splines con puntos disipados
En el Capítulo 2 desarrollamos criterios para seleccionar la triangulación para una
superficie interpolante. Ahora, dada la tria,ngulación, el objetivo de este capítulo es en-
contrar un spline de grado 1 ó 2 6 3 ó 5 que interpole cada triángulo. Nos referimos en
este capitulo al trabajo de Spaeth [13].
Definición 3.1 Sea q : R2 -+ IR una función interpolante, diremos que q es un Spline si
esta compuesto por la unión de funciones bípolínomíales, donde cada función bipolínomíal
está definida en un triángulo de una triangulación T.
3.2 Interpolación Bilineal
El primer splíne es de la forma z = Ai + By + C definido sobre cada triángulo, donde
es la ecuación de un plano. El interpolante resulta contínuo. Dada la triangulación
T del conjunto de puntos pi = yi), i = 1, , n, con sus valores Sin pérdida de
generalidad escogemos tres puntos (x j, y i) con f (x j , yi) = zi , j E {1, 2, 3}. El interpolante
sobre el triángulo formado por estos puntos lo definimos de la siguiente manera:
E(x, y) = a -I- b(x + -
47

C =
1 0 0
1 X2 — X1 Y2 Y1
1 X3 — XI Y/3 — Y%1
x2 — xl Y2 — yl
—x1y3— yl
Evaluando los puntos (z-,, y) yi), i E {I, 2, 3} entonces
1 0 0 a z
1 X2 — XI y2 —u1 b Z2
1 X3 — xl Y3 — Y1 e Z3
Definiendo d = (x2 — x1)(y3 — yi) — (x3 — 2,1)(y2 — yl) O hallemos a, b, e:
Como E(x i , y l ) = Z1 = a, por la. regla de Cramer hallemos b y c:
1 z1 O 1 z1 O
1 02 Y2 Y1 1 z`5 z1 Y1
1 Z3 Y3 Y1 1 Z3 Z1 Y3 — yl
1 0 0 x2 — xi y2 — ,V I
1 x2 — X1 y2 — J1 x3 — x1 y3—yj
1 X3 — X1 y3 — y i
b =-- (Z2 Z1)(Y3 Y1) — (Z3 z1)(y2 — Y1)
1 0 zi 1 z1 O
1 x2 xl z2 O x2 —x1 Z2 — Z1
1 x3 — x j. z3 O X3 — X1 Z3 Z1
C = (=2 - x1)(z3 - z1) — ( 02 — Z1)(X3 x1)
Hallemos las coordenadas baricéntricas
4.x Y2)) (X3) Y3).
14, Pa, /13 con respecto a los puntos (xi Y1),
48

Sabemos que:
) 1.12 X X3 2 ,u3 ( )
Yl Y2 Y3 (3.1)
+ 1A2 + = 1
1-A1 XI + /12 X2 + i-h3 X3 = X
/Al 1/1 + !PI /A3 Y3 = Y } (3.2)
— 11,3)x2 µ3x3
— — Ma)Y2 M9Y3 y
(Xl - X2) + 1A3 (X3 - X2) = X - X2
/II - 712) )1•43 - Y2) = y — ://2
Hallemos pd por la regla de Cramer
X - X2 X3 - X2
Y Y2 .Y3 Y2 Y Y2 Ya — Y2 =
— za x3 — x2
X1 - X2 X3 - X2
Y Y2 Y3 - Y2
X2 - Xi X3 - X2
Y2 YI Y3 - Y2
( - X2) (X3 - x2)
Y Y2 Y3 Y2
X2 - X1 X3- XI
Y2 - yi Y2
(7 .9 - X2)(Y y2) - (y3 Y2)(X x2) d o
49

AhOra reemplazando en (3.1) //i = 1 — 1/2 — /1,3, tenemos:
(1 — pa — /13)X1 -1- 1.12X2 4- 11,3X3 = X
(1 — Pa — 113)Y1 PaY2 +1.13Y3
P2(x2 — xt) +1.43(x3 — xt) = x — xI
P.2(Y2 y') 1-/3(1Y3 Yi) = Y — Vi
= = µa =
— xI x3 — xI
Y — Yi Y3 Y1
X2 — XI X3 — XI
1/2 — 1/1 y3 -- y1
— x3 X3 — X1
Y — Y3 13 — y1
d
(J71 x3)(Y y3) -- (1/1 -- Y3)(X -- X3) ,
s2 — sj
7/2 — Yi Y — Yi 113 =
x2 -- xl x3 — x1
Y2 — 1/1 Y3 — 1/1
3 = (7:2 — x1)(1 Y1) — (Y2 — Yi)(:c — 271).
d
Haciendo
X4 = X11 X5 = X21 X6 = X31
114 = y1 7)5 = 7)2, Y6 = 7)3
y denotando:
= 2:14.2 — xi+1, tli = yi+2 — yi+1, i E {1, 2, 3},
resulta
= 1,1(zc, y) = [7.4(Y — Yí4.1) — ví(x — x-1)1/d,
d
50

donde d = (x2 — x i )(y3 — y i ) — (x3 — xi )(y2 — y i ) O.
Estos cambios son importantes para evaluar la función interpolante E porque basta evaluar
las ;4, i e { l, 2, 3} ya que EGc, y) resulta ser una combinación lineal y de las pci, por ser x i ( X3
E una ecuación lineal y xy
una combinación afín de . de tal yl y2 y3
manera hemos encontrado el siguiente teorema:
Teorema 3.1 Dada una trianguladón T del conjunto de puntos pi = (xi, yi) con sus
valores de función zi, i = 1, , n. Sin pérdida de generalidad escogemos tres puntos y lo
denotamos (xj, yi), j e {1, 2, 3} en el que definimos la función interpolante
E(x, y) = a + b(x — x i ) - y1)
y expresamos el punto (:) como una combinación baricéntrica de
xi (X2 X3
(yi ) (y3) •
Haciendo:
x4 = xi, X5 = X2, x6 = x31
Y4 = Y1 > Ys = Y2) Y6 = Y3:
i E {1,2,3}, ZLi = xi+2.- x24-11 Vi = Yi4-11
se cumple:
I. ta =
(72 — 71)(Y3 — Vi) — (73 — 71)(Y2 — y i )
d
(x2 2,1)(43 - Z1) - (Z2 - '1)1x3 - X1) í. = 1
donde d = (x2 — xi)(y3 — yi) — (x3 — xi)(y2 — yi) O.
51

( Y1 y como
xi
2. 1.1.,; — yi+i) u; (x — =i4.1)1/d, i E {1, 2, 3}
3. E = +i12 ( °2 ) + 113 (1 xi
X2 = )) + bt2E(( Al3 E( ( ) 51 Y2 Y3 Y1 y2 Y3
Teorema 3.2 Las funciones lineales 14, i e. {1, 2, 3} dependen de x, y tienen las siguientes
propiedades:
1. 1-4 (Pi) `i). E (1,2,3}.
2. 1-4(Q) = O (2 E Pi+Iln+2,
3. ili(g) > O para i {1,2,3}
i E{1,2,3}.
Q. E A.
4. ji.i(Q) < O para algún -1==> Q1
Prueba:
1. AsignandoY
XI
;al xi +1,42 (X2 ) 11,3 ( )
Y1 Y2 Y3 yI
(xl + /4 (T3 ) = 0, \ Yi \ Y2 \ 1/3
en (3.1) tenemos:
)
( X ( X3 ,2 )
son vértices de un triángulo de una triangulación linealmente independiente :
/-11 = 15 F-12 = 05 1-13 = 0
Resumiendo este. y los demás casos obtenemos:
mi(pi) = 5,1;, para i
52

xi xi+l X++2 7'4 ni+i ) ni+2
\y yí Yí+ I Q = ní(Q) = °
X ( Xi+2 •<=1:. ( = -4+1 j-tí +2
I )t-4+1 ní +2 = 1,
Yi+i Yi+2 )
> O
P4+1 > O,
ri+ 1 ) .ri+2
5 11,41 7)7:+2 Q es una combinación convexa de los puntos
Q E 74-1-1Pi+z,
los puntos p i, p2, p3.
3. Utilizando :3, es trivial.
3.3 Interpolación por splines bicuadráticos
Dados los puntos {(xi, yi)}, conf(xi, yi) = zi, i = 1, . , n, una triangulación T, dadas
también las derivadas parciales z,v„ i E {1, , n}, el objetivo es construir una función
interpola,nte (15(x , y) compuesta por funciones cuadráticas sobre cada triángulo, de tal
manera que la función sea contínuamente diferenciable sobre el casco convexo.
Dado (x, y), según Powell [12] es importante en la práctica, utilizar un método local para
hallar el valor de función z en el punto (x, y), ya que cuando calculemos z, este va depender
del perímetro del triángulo donde este situado (x, y).
En este capítulo la base de los polinomios p„(x , y) R2 1-4- R que se utilizan para construir

el interpolan te (Kincaid [8]) será:
x"-1 71-1 y
xn-2 xn.-2 y x n-52
zn-3 Xn-3y X
n-3
y
2
X
n-3
y
3
1 1/3 • • • e.
El número de elementos de la base sería:
1 + 2 3 + 4 • • • + rt + 1 =
(n+ 1)(r¿ + 2)
que coincide con el número de coeficientes a hallar.
Por ejemplo para el caso del spline bilineal requerimos para cada triángulo
(1 + 1)(1 + = 3
datos.
Para nuestro caso, si queremos interpolar sobre cada triángulo requerimos
+ 1)(2 + 2) = 6, pero tenemos 9 condiciones de interpolación que no coincide con los
6 de coeficientes que requerimos.
Para el caso bicúbico si queremos interpolar sobre cada triángulo requeriríamos
+ 1)(3 + 2) = 10, pero tenemos sólo 9 condiciones, 6 condiciones de las derivadas
parciales y 3 condiciones de interpolación, que no coincide con el número de coeficientes,
además si tuvieramos las segundas derivadas parciales tendríamos 9 condiciones más que
en total serian 18 que tampoco coincide. Para contrarrestar, Powell [12] recomienda:
a) Restringir el polinomio interpolarte.
5) Subdividir el triángulo en el que estamos trabajando de las siguientes maneras
mostrad as en las figuras - 3.4.
2
54

A
Figura 3.1: División del 15 ABC en 4 triángulos
2)
Figura. 3.2: División del Ls ABC en 6 triángulos
55

3)
Figura 3.3: División del A ABC en 12 triángulos
Figura 3.4: División del A ABC en 4 triángulos
Dado un triángulo ABC cualquiera. El objetivo es ver cómo se relacionan dos funciones
bicuadráticas definidas sobre dos subtriángulos que tengan un lado en común y que sean
continuamente diferenciables sobre dicho lado.
Teorema 3.3 Dado un triángulo cualquiera .A.BC, (Y. -7,L O. Sean
gi(x, 7-.1)
(12(x, = bt
+ a2( + Oy + -y) + a3y + a4(az + fly + -y)2 + a5(cíz + fiy + y)y + as?? ,
+ b2(ax + t3y + ^f) + b3y +1)4(az + /3y + -y)2 + bts(ax + 9y + -y)y + bey2,

aa2 + aasy,
cyb2 + absy; ax
dos funciones bícuadr.ticas definidas sobre dos subtriángulos del ISABC . cuya intersección
es el lado k: crz: + = O. Si (11 , q2 son funciones continuamente diferenciables sobre
dicho lado entonces se cumple:
1. al + a3 y + a6 y2 b3y b6y2, V(z, y) E K
0q1 0(12 2. aa2 + aasY = — = ax ax = oeb2 abs y, V(x, y) E K.
3, (12(x., y) = giGe,1i) + (1)4 — a4)(ax + + "j')a.
Prueba:
1. Sean (:c, y) E K ax /9y + -y = O
(x, y) = al+ a3y + a6Y2
T2,(x, y) = b1 + b3y bc:112
V(x, y) E K, V(x, y) e K,
Como q i , q2 son diferenciables sobre K, son continuas. Entonces tenemos:
al -I- a3Y a61/2 = bl + b3y + b6y2 Y(x, y) E K.
2. Derivando las funciones bicuadráticas qi , (II con respecto a x resulta:
aqi (x, y) = aa2 + 2a4a(ax + fly + -y) + aa5 y,
<1q2 Gc, = GYb2 2b4a(ux + + abs y.
Evaluando para (x, y) E K tenemos:
y como qi , q2 son diferenciables sobre K, entonces:
aa2 + aas y = y) = —0q2
(x, y) = ab2 + absy. ax ax

3. Dé 1) tenemos: (a1 — b1) + (a3 — b3)y + (a6 — 66)Y2 = O V(x, y) E K
al = hl, a3 = h3, as = hs. De 2) resulta aa2 — ab2 + (aas — abs)y = O
aa2 = ab2, aa5 = ab5 , a O = a2 = b2, a5 = bs.
= bi para i E {1, 2, 3, 5, 6}
q2(x, y) = al + a2(ax fiy + -y) + a3y +64(az + /3y + 7)2+
a5(aa5 + 01/ 1') a6 y2 .
Sumando y restando a4(ax + fi'y + -y)2 y agrupando tenemos:
42(x) y) = 41(x, + (b4 a4)(ct Py 'Yr
por la definición de qi , q2 es b4 — a4 es única. O
Teorema 3.4 Dado un triángulo cualquiera ABC, de la trianguladón T. Para funciones
bleu adráticas q1 , q2 definidas sobre dos su btriángulos del triángulo ABC cuya intersección
es el lado k = cY.r +13y +-y = O se cumple: Si qi ,q2 son continuamente diferenciables sobre
el lado k qi(x, y) = q2(x, y) + A(ax + 0y + 7)2.
Prueba:
Lo hemos probado en el Teorema 3.3.
. )Sea ql (x, y) = q2(x, y) + )( ax + 18y + Evaluando en (x, y) E K: cex+fiy+-y = 0 obtenemos: qi(x, y) = q2(x, y)+A(0)2 = q2(x, y). Esto significa que q l , q2 son contínuas. Tomando el gradiente:
v(ii(x, y) = vq2(x, + 2A(ax + flY + -r)(a,
evaluando en (x, y) E K: ax + fly + -y = O, resulta Vqi (x, y) = Vq2(x, y) + 2A (0)(a, fi)
Vciik = Vq2(x) Y); q1 , g2 son continuamente diferenciables sobre K, O
Ahora utilizaremos el teorema anterior para construir una función iuterpolante de
58

clase C1 en cada uno de los triángulds anteriormente mostrados en las Figuras 3.1, 3.2,
3.3, 3.4:
Primer caso:
Para la Figura 3.1: dividimos el triángulo en 4 subtriángulos.
B(x2, 1/2)
Figura 3,5: División en 4 subtriángulos
Dados los valores de la función interpola.nte z1, z2, z3 y sus respectivos gradientes
(z,,„ zy,),(zti„ zy2), (z„,, zy3), para el triángulo ABC. Para el subtriángulo PQR defini-
mos la función bicuadrática q1(x, y) = Áx.2 + Éxy + Úy2 + Dx + Éy + É.
Construiremos funciones bicuadráticas q2, Q3, q4 definidas en los subtriángulos AQR, PBR,
CPQ que sean diferenciables sobre los lados QR, PR, PQ entonces por el teorema 3.4
tenemos:
(i2(z., y) = ql(x, y) + Ai(aix + Ply + 71)2 ,
(13(x , = qi(x,y)+ A2(a22: + 132y + 72)2 ,
q4(x , y) = qi(z,y) + ,\3((3z fi3Y + 73)2.
Utilizando las tres las 3 condiciones de interpolación tenemos:
q2(xi,Y1) = qi(;;ci, Yi) + Ai(c:Y1x1 +
q3(272, v2) = qi (x2, Y2) + 2 ((Y:Z.7:2 + /32y2
+ 71)2,
+ 72)2,
(1)
(2)
(141x3, y3) -= g1 (x3, Y3) + -4(cr3=3 + 03y3 + 73)2. (3)
tal:tibien usando el gradiente. en cada punto del triángulo ABC tenemos:
59

\-7,12 (2:1 ) (-7x3. 01,a. ), (4) Y (5)
Vq3 (7:2> !h.) = (zsz> zy2 (6) Y (7)
Vq4(x3,1/3) = (zx3, zy3), (8) Y (9) donde las incógnitas son Á, B, C, .b, É, P, A i, A2, A3 que coinciden con el número de ecua-
dones, pero Powell [12] demuestra que en el sistema planteado, que es de la forma
A1 x = b1, la matriz Al es singular cuando las líneas AP y CR se intersectan. Por
eso descartamos esta posibilidad.
Observación 3.1 Esto no siempre sucede ya que AP y CR pueden no intersectarse en
un punto diferente de A como mostramos en el siguiente gráfico:
B(x2, Y2)
A(xi,111.)
Figura 3.6:
Este caso seria el mismo caso anterior, solo con la diferencia que CP y AQ se inter-
sectan. La matriz Al tambien será singular. Luego descartamos esta posibilidad tambien.
Segundo caso
En la Figura 3.2 dividamos el triángulo en 6 subtriángulos.
Sea 01 un punto cualquiera del triángulo, Fi, Q, P puntos arbitrarios sobre los tres lados.

Figura 3.7:
Con los mismos datos de entrada del caso anterior definimos para el subtriángulo
01QC la función bicuadrática
ql (z, y) = Áz2 fizy Óy2 + Éy + É,
que en total tiene 6 parámetros y desde que es de clase C1 , el interpolante del triángulo
ABC es calculado sobre los segmentos 01 Q, 01A, 01R, 01B 4 O1P,01C definidos por
(yk= Oky = O, k e 11, 6}. Cuando extendemos el subtriángulo 01QC por el
teorema 3.3 tenemos 6 parametros adicionales. Esto no cambia contando como se rela-
ciona la funciion bicuadratica q6 del subtriángulo PO I C con la función bicuadtica qi del
subtriángulo Q01C. En total tendríamos 12 parámetros.
La función bicuadrática <le se relaciona con la función bicuadrática q l de la siguiente forma:
q6(x, y) + A6(a6:c + fisy + 76)2 =-- (x, y) (3.3)
Sin pérdida de generalidad asumimos que 01 está en el origen, entonces se tiene
= O, k E {1,...,6}, así hay tres condiciones impuestas por (3.3), ya que al
expresar qG en función de qi y reemplazarlo en la ecuación (3.3), podemos calcular los
coeficientes de .172, xy, y2 y debido a que estas funciones son linealmente independientes ,1119 coeficientes que lo acompañan resultan ser ceros, como veremos cuando procedemos
a encontrar las ecuaciones (1), (2), (3) de las 12 ecuaciones que requerimos para hallar el
interpolante sobre el triángulo ABC. Con los 9 datos plantearemos 9 ecuaciones desde
61

la ecuación (4) hasta la ecuación 12 y despejando un parametro de cada una de las
ecuaciones (1), (2), (3) y reemplazarlo en cada una de las Ecuaciones desde la ecuación
(3) hasta la ecuación (12) podemos plantear un sistema. lineal de 9 ecuaciones con 9
incognitas..
Powell [12] asegura que existe dicha función interpolante construida de esta manera ya
que, cuando plantea un sistema lineal la forma Al x = b, Al resulta no singular.
Para la implementación computacional Spaeth [13] utiliza 01 como el círcuncentro
cuando está en el interior del triángulo y sucede solo con triángulos acutángulos.
Spaeth recomienda triángulos acutángulos que tengan ángulos menores de 75°, ya que el
circuncentro no está ubicado ni muy cerca a los lados ni a los vértices del triángulo.
Para hallar las 12 ecuaciones vamos a suponer que 01 = (0, 0) es el circuncentro del
triángulo del il.ABC y está en el origen.
Hallemos las 12 ecuaciones:
Sea Ti (x, = .Áz-2 By2 + Gy + 1)x + Éy + F definido en el triángulo OQC y por el
teorema 3.4 tenemos para las funciones cuadráticas en los subtriángulos 01,4Q, O1 AR,
01 .11B, O I BP, D1 PC:
q2(x, y) q.1(x> y) + A l (cr iz +13102 )
q3(x, y) = q2(x, y) + A2(cx2x + /92y)2,
q4(x, y) = q3(x, y) + ›t3(CY3X b9.3y)2,
qs(x, y) = q4(x, y) + + /3402,
.cm(x, y) = qs(x, y) + As(asx + / 502,
y para relacionar el subtriángulo OPC con el subtriángulo OCQ tenemos:
qt(c, y) q6(x, + AGGYex P602.
62

Stimando las últimas 6 ecuaciones y adémás simplificando tenemos: \ 2
((-Yi + )("Ji y)2
+ A2((Y.2:1; + fi2Y)2
+ A3 ((>!3:r + fi3V)2
+ A4((Y4x + )64)2
+ As(a5x, + PO) +
,\G (o/ G x +130)2 = 0
Considerando que los coeficientes que acompañan a x2, y2, xy, deben ser ceros, tenemos:
.1, 10,12 + A2ty22 + A31..y32 + ..,1 4c2.42 + )5a¡,2 + )16(-26
2 = O
2),TcYlfii + 2A2a2192 + 2A3(x3,63 + 2,A4ce4/64 + 2,N5a5/35 + 2)16a6,86 = O
Á1012 + + A3)832 + 4i942 ‘5P52 A6/362 = O.
Utilizando el valor de función para los puntos C = (xi,Yt), A = (x2, y2), .8 = (x3 , y3)
tenemos:
Para A = (x2, 112) que es punto común de los subtriángulos A01 R, AO1Q, donde se definen
las funciones bicuadráticas q3, q2, tenemos que q3(x2, y2) = q2(x2, y2), implica
,3(x2, V2) ,1(x'2, y2) + (atx2 + fily2) . Resulta
z, = Áz-1 + 13=2y, + ¿iy2 + bx2 + Éya + P + (al x2 + r31 y2)2 (4)
En el punto B = (x3 , y3) que es punto común a los subtriángulos 01B P, O i RB donde se
definen las funciones bicuadfaticas q3, q4i tenernos que q3(z3, y3) = q4(x3, ya ) implica:
z, = q5(x3, y3) = ;71(23, y3) + Maix3 + filY3)2 + A2(a2x3 + je2y3)2 + ;\3(a3x3 + /33:4/3)2
resulta
tia = Áz32+Éx3y3+Úy3+hza -i-Éya+P+),1 (cei X3 + Y3)2+,\ 2 (Y2 + fl2Y3)2+A3 (CY3 X3 f13y3)
(5)
Para el punto C = yl) que es punto común de los subtriángulos al PC O1CQ donde
se definen las funciones bicuadraticas qe, q i tenernos que
yi) = (x / , vi ) implica
:f.] = Áíf + Óyi2 + Dx1 + Élh (6)
Ahora utilizaremos los datos de los gradientes en los vértices del triángulo ABC : Para
el punto A = (x2 , y2 ) que está definido sobre el lado común de los subtriángulos O1AQ,
O IAR donde la función bicuadrática q3 está. definida sobre el subtriángulo O I AR, y la
función bicuadrática, q2 sobre el triángulo O I AQ, tenemos:
743 (2:2, y2) = 7,12(x2, y2) implica
63

Vq3(272, Y2) = v•;' ,71. G172, 1/2 + 2A dai + 11)((Y1 rg1')7
luego
zy,Yr = (2Áx2 + f3Y2 , hx2 + 2¿' + + 2),i(aix + fily)(ai, 01)T
implica.:
a-.2 = 9-11- " 2. + Ry2 + 15 + 2A1 ((Y-1 x + fitY)t-Y1 (7)
= ÉV2 2(5y2 + + 2A (CX1 X + filY)P1 (8)
Para el punto B = (x3, y3) que está definido sobre el lado común de los sub-
triángulos O I RÉ, O I BP, donde la función bicuadrática qs están definida sobre el
triángulo ()1 HP y la función bicuadrática q4 está definida sobre el triángulo 01 RB ,
ienemos:V q5(x3, Y3) = Vía (X3, :1/3),
q5(:1"- Cil (X> y) + (cki z + 13102 + 2(("-.Y2z + 0202 + 3( (13:1"- fl3Y)2.
(.,. alculaclo el gradiente en el punto B tenemos:
Vq, (x3, y3;1 = (2ÁT1 + + 15, Bx3 2(Yy3 + É)7" + 2,11(cr i + fily3)(ai , +
2,\,(Lx2x3 /32y3)(ex2, /92 )7" + 3Gy3x3 + /3.3 y3)(ex3 , /33)T
Esto implica:
= 2Ax3 + f-iy3 +h+2A i a'i (ai x3 4- f31 y3) + 2A2(x2 (o'2x3 + fi2y2,) + 2A (73(cY3T3 + r13 Y3)(9)
kyy = 4-51y3 + 243 + É + IN1,81 (ai fliy3) + 2A2fi2(a2x3 + fl2y3 ) + 2A3/33(a3z3 + /33y3)
(10)
En el punto C = , y1) que pertenece al subtriángulo CO1Q y donde está definida la
función qj(x, y) = Ás2 + Bxy + Cy2 + Dx + Ey + É resulta:
21x1 + f3y1 + b (11)
z,„ = B -1- 2c y2 + E (12)
Ahora supongamos que (e1, e2 ) = 01 no está en el origen. Inicialmente todos los
puntos del triángulo ABC lo trasladarnos al origen y calcularnos las funciones cuadráticas
que componen la función iuterpolaute del triángulo ABC luego hacemos el siguiente

cambio de variable
:=
Tercer Caso
En la Figura 3.3 dividimos el triángulo ABC en 12 subtriángulos
A
Para la construcción de un interpolante q sobre el triángulo ABC procedemos de la
siguiente manera: inicialmente el subtriángulo PQR. es un caso particular de la. subdi-
visión en 6 triángulos en el cuál tenemos 9 parámetros por calcular ya que los valores de
la función de los puntos R, P, Q podemos estimar en forma lineal y también sus derivadas
parciales. Luego agregamos tres factores más, cuando extendemos los subtriángulos RSQ ,
R. S P , P S Q hacia los subtriángulos RQ A, ,C P, PBQ respectivamente. En total tenemos
1:2 parámetros. Para completar el número de ecuaciones encontramos las aproximaciones
de las derivadas normales en los puntos R., Q, P que nos sirven para plantear 3 ecuaciones
más, entonces el número de ecuaciones coincide con los 12 parametros a ser calculados.
Powell [121 demuestra para este tercer caso que siempre es posible bailar la función inter-
polante /7. l'ara la implementación computw-ional tenemos:
inicialmente en el subtriánguio PQR queremos aplicar el caso anterior, pero si supieramos
que el triángulo ABC es obtusángulo tendríamos que el triángulo PQR también lo es. Eso
que no podemos escoger el cicuncentro como punto interior. Lo que tenemos que
nacer, es tratar de resolver el problema en cuestión de diferente manera, porque Spaeth
6.5

recomienda que el baricentro del triángulo PQR sea también el baricentro del triángulo
A B(.
Las derivadas normales pueden ser calculadas por interpolación lineal. Así por ejemplo:
(ag 1
n 1R R 5(gradq(c gradqIA) '
en EL. Dadas las derivadas normales a lo largo de los lados, junto con las condiciones de
interpolación. Entonces se garantiza que la función global Q es continuamente diferencia-
!)1e.
cuarto caso:
Tenemos el caso de la Figura 3.4:
En forma análoga se plantea un sistema de ecuaciones A l x, = h donde Powell [12]
demuestra que la matriz A l es una matriz no singular, pero Spaeth [13] descarta esta
posibilidad para la construcción del interpolante, dada la simetría de la figura.
3.4 Interpolación por spline bicúbicos
Dados los puntos p = yi), = 1, . n con sus respectivos valores de función, las
derivadas parciales zv,, una triangulacióu T cualquiera. El objetivo es construir un
interpolante de clase C' sobre la triangulación, compuesto por funciones bicúbicas sobre
cada triángulo. Para el triángulo cuyos vértices son pi , 102, :03, resultan tres subtriángulos
v I ST)3 , pSp i con un punto Mterior S (ver Figura 3.8) con un punto interior S. :

N
N
P3 pi
Figura 3.8: Triángulo base para un spfine bidbico.
En la Figura 3.8 el punto . significa que están dados los i E {1, 2, 3}, el círculo que
están dadas las derivadas parciales en los puntos pi, i E {1, 2, 3} y finalmente los vectores
que están dadas las derivadas normales sobre cada lado. Ahora, sobre cada subtriángulo
construimos funciones bicúbicas de la forma:
ai X3 + a2z2y a3xy a4 y2x+
-1-asy3 a6 Y2 a7y asx2 agx am.
Luego, para construir dicha función bicúbica requerimos 10 coeficientes, y ahora como
(37

queremos interpolar sobre un triángulo y este está dividido en tres subtriángulos, re-
qneriremos 30 coeficientes en total. Por otro lado Spaeth dice:
Es muy importante el hecho de que cada polinomio bicúbico y su gradiente
son únicamente determinados sobre un lado de un triángulo arbitrario por sus
valores de función zi y las primeras derivadas parciales zrti , zyi en sus vértices
como también por el valor de la derivada normal en un punto interior del lado.
La derivada normal es calculada en forma lineal y está dada por:
) I 1 ,
57; iff' ) 1 Pi + zy)IP1.1
donde H3 es el punto medio de pl y /02
Ahora para calcular los 30 coeficientes utilizaremos las siguientes condiciones:
1. Cada subtriángulo de este caso tiene un lado común que pertenece al triángulo
formado por los puntos p i ,p2,p3. Como en dicho lado tenemos información de
las derivadas parciales tendríamos 4 condiciones además su valor de función en
lados finales de cada lado total tendríamos 6 condiciones, Ahora como tenemos tres
s u bt riáng tilos tendríamos 18 condiciones.
2. Tomando en cuenta las derivadas normales de los lados del triángulo tendríamos 3
condiciones más.
3. Construim. os las tres funciones bicúbicas definidas en cada subtriángulo de tal ma-
nera que tengan el mismo valor de función y gradiente en las aristas comunes en
el punto S que resultan 6 condiciones, 2 con respecto al valor de función y 4 con
respecto al gradiente (ver Fig. 3.8).
4. Finalmente, al evaluar las derivadas normales en los tres puntos p que pertenecen a
Sp i en la dirección bp i ó Sp2 en la dirección5p2 ó Sp3 en la dirección 5p3 tendríamos
3 condiciones más dadas
Luego sumando las condiciones tendríamos: 18 + 3 + 6 + 3 = 30 que coincide con el
número de coeficientes requeridos.

3.5 Interpolación por spli-nes de grado 5 sobre trian-
gulaciones
Dados los puntos p = {;c¿, yi}, i = 1, . . , n con sus respectivos valores de función z,:,
sus derivadas parciales zz „ z y„ sus segundas derivadas parciales zz,,, zzy , = zy„,
T una triangulación cualquiera. El objetivo es construir un interpolante de clase G1 sobre
la triangulación, compuesto por polinomios biquínticos sobre cada triángulo que son de
la forma:
p(,c, y ) al a,,x4 y + a3x3 y2, ci4x2y3 aszy4 ao5
a7/74 clax3y a9x2 Y2 a10xY3 a11 y4+
a12a'3 a13x2y+ a14 xy2 a1sy3 a le x2+
auxy -f- a18y2 a19x + a20y + a21.
El polinomio de q
tiene la misma
forma de p
Figura 3.9: Triángulo base para Splines de grado 5
69

Para calcular los 21 coeficientes en el triángulo T, utilizaremos las siguientes condi-
ciones:
1. El valor de función zi, que son tres condiciones.
2. Las derivadas parciales (Z,, Zvi ) que dan un total de 6 condiciones.
3. Las segundas derivadas parciales en los vértices del triángulo:
zxx„ zz y, = zyx„ zuy„ que suman 9 condiciones
4. Las tres restantes condiciones se cubriría utilizando las derivadas normales en cada
lado.
En Total tendríamos 3 + 3+ 6+ 3 condiciones que coincide con el número de coeficientes
del polinomio q biquíntico.
La derivada normal se utiliza como el caso anterior:
=. (Zz ) p,i. an 2 2 I ) P k, Z
i )
3.6 Alcances de los Splines bilineales, bicuadráticos,
bicúbicos
Para el cálculo del valor de función de cada spliue utilizaremos las rutinas de Renka
"ACM 624" [14]
Ejemplo 3.1 Dados 103 puntos pi = (2, 0), p2 = (4, 0), p3 = (4, 5) con sus respectivos
valores de función z 1 = 4, z2 = 4, z3 = 7. Recordando para el caso de las cuadráticas
empleamos la división de 6 subtriángutos, cuando los cíngulos del triángulo son menores
de 75 grados, en cambio si es mayor de 75 grados (por lo menos un ángulo del triángulo)
usaremos la división en 12, subtriángulos.
Para este ejemplo usamos la división del triángulo en 12 subtriángulos debido a que un
ángulo es de noventa grados.
Graficar los Splines bilineales , bicuadáticos, bicúbicos sobre dicho triángulo.
70

Sóliicióri: Como la regla de correspondencia del im.erpolaute bilineal, cada triángulo
es un plano en el triángulo dado, tenemos:
20 + 3y 5
Ahora utilizamos la rutina de Renka [141 con la subrutina INTERCO para la interpolación
bilineal; QUADSF para la interpolación utiliza la teoría desarrollada. Tenenemos los
siguientes resultados cuando evaluamos 15 puntos dentro del triángulo dado:
::r 1 y z(Spline bilineal) 1
z(Spline bicuabrático) i I z(Spline bicúbico)
0 0 4 4 4
2 0 4 4 4
4 0 4 4 4 6
1
0 4 4 4
8 0 4 4 4
7 ' 1:25 4.75 4.375 4.46875
5 1.25 4.75 4.66768 4.72485
3 1.25 -4.75 4.66768 4.72485
1 1.25 4.75 4.375 4.46875
2 2.5 5.5 5.5 5.5
4 2.5 5.5 1.63415 5.86585
6 2.5 5.5 1 5.5 5.5
5 3.75 6.25 6.625 6.53125
3 3.75 6.25 6.625 6.53125
4 5 7 7 7
Para la interpolación lineal, fácilmente se verifica que los resultados son buenos reem-
plazando en la ecuación del plano. Ahora gralicaremob:
Los puntos se obtienen corno muestra el siguiente gráfico:
TI

Figura 3.10:
La idea es obtener una malla triangular de este tipo. Para la interpolación lineal no
es tan importante esta malla, debido a que el ínterpolante de un triángulo es un plano,
en cambio para los splines bicuadráticos, bicúbicos requerimos dicha malla para graficar.
Mientras la .malla este más particionada, la gráfica será mejor.
72

Figura 3.11: lrherpolaci(Sn lineal

10
15
Figiira 3.12: Ihterpolación Bictiadrát,ica.

10
8
6
4
2
o
5
o o
Figura 3.13: · Iniel'J)Olación Blcuóka
75

Capítulo 4
Otros métodos
Dado el conjunto de puntos p = = (xi, yi), i E {1, 2,..., n}}, con su respectivo
valor de la función zi, el problema consiste en encontrar una función interpolante en forma
muy diferente a lo expuesto en el capítulo anterior. Inicialmente desarrollaremos algunas
definiciones previas que utilizaremos en este capítulo.
Definición 4.1 (ver [4]) Dado i E , un vector m1116-índice conteniendo n com-
ponentes denotado por z (i3O , . . . ,i„), y sea 171 la norma de z definida por la suma de las
componentes de
Los polinomios de Bernstein de n variables de grado m son definidos por:
(71
B¿ (uo > u i > • • • , un) = -, ILY IL'i' • • . ut„". , 1
donde uo + ui + ... + tin = 1 y donde
m rn! Z = icli1 ! ...in!, l'i = 171 (
es llamado coeficiente monomíal. Se define BP(uo , ..., u.„) = O para 171 mBy (u0 ,
4.1 Los polinomios de Bernstein satisfacen
1 sí rn = 171 = O
O si 1 71
E 7-1,,,B;*--,- , ( 11,0, • • • un), otro caso
Br(tio, • « • ,
76

donde a":„ E Z es el m- ulti-indice teniendo O en cada componente, excepto para el a
componente que es .1.
Prueba Si m = = ° io = = O Bó(uo, , um) =
Co)tig, ... non = 1.
Si 171 # rn = Br(uo , , u„) = O, por definición.
Para otro caso:
BP(uú , . • • , u„) = (771)!
°
U
U1
Un, ft +. • • • in = i0 ! ) • • • I
(por definición)
Bir(uo , un) 1)! (m) Ou jii t4r. ,
io!il! • • • , 10 it in 7./.0 11 ... Un
Br(11.0, 711 ... , un) = ( m - 1)1.(i0 + il + • • • ira) . . 1
(por definición de í) zo !t i ! ... , in !
= (m — 1)! (.14 u Il ... li n
n
) ((m — 1)! (Q 241 ...1.4". ) (1n — 1)! (uío° ull . . . un
In ) (i0 — 1)1i i ! ...in!
+ io!(i i — 1)! ...in! n
+ • • • + i0 !il ! • • . ( in ... 1
)!
t0—hile , , , ul: u010 11,111 .1 1.4,21. 3 . , .
= uo(771 1)! (Lo —
1)!ii! . . . in! +u l (trz 1)! io!(ii .... 1)!i2! . . . in!
luutii . . . un ,"._:" ust:'—'
u0B-yreol (tiO, • • • un) + U) Br— (Uo . 11„) • 1—ct
E u„Brs—Ca , un ) O at=o
+ Br — 1 (uo • • • un)
Definición 4.2 Una Superficie Triangular de Bézier está definida por:
x(21) E bz.137-1.(a) 1:1=n.
donde a = (til, • • • ›tit), con lili = 1, b i e R3.
x(t) es la representación paramétrica de una superficie triángu/ar de Bézier de grado n,
los coeficientes br son llamados puntos de Bézier asociados a una superficie o puntos de
control. Ellos forman la red de Bézier o poliedros de Bézier asociados con la superficie.
Los puntos de esquina del triángulo yacen en la superficie.
+un (m - 1)!io!ii! • • • in•-.1(in — 1)!
77

Definición 4.3 Dados bo,b1,...,b„ en IR/ y t E R. Sean bl = br, lil = n
bl(t1) = u1A-.! ( -11) + vbr4-1 (fi) + tvg"..1 (il) donde r = 1, ..., n , ril = n - r.a 1--et 1-ez t e3
Entonces al punto bri le llamaremos punto intermedio del algoritmo de Casteljau.
Teorema 4.2 Dado el punto intermedio b: en el algoritmo de Casteljau. Entonces b:
puede ser expresado en términos de los polinomios de Bernstein
= E br+IBirf(a), 171 = n - r.1;1=,
Prueba: Lo demostraremos por inducción: Se verifica para r = 1, y supongamos que se
cumple para r, Veamos para r 1:
gid = ubr + vbr + wb.T.; i. ,-fre, s+e, ,.-Fe, = u E b•:+:;+,,, Bri + v E br.t.;+ ,.2 Bri + +tv E br+;+,.3 Bri
ril=, l.71=, Cil=r = E ttbz+i,B!.i ...„+ vb-s,+3,B.1,+ Wbit4.;Eri_e3
iji=r+1
= E b7+;13`.;+1 O I gi=r+i
gi=n.
Definición 4.4 Sean u1 , u2 dos puntos del dominio, d = (d, e, f) = u2 - u1 . La derivada
direccional de una superficie en x(u) con respecto al vector ct esta dado por:
Ddx(a) = dx„(a) + ex„ (f.1) + f c„, ), a = (u, y, w)
Utilizando la Definición 4.4 podemos calcular la derivada direccional de
nt b(a). E uiviwkg, i!j!lc!
Nota: Especialmente sale del Teorema 4.2 que bl(fil = E b-,/p(a). .7
78

Entonces tenemos: Ob( g) a (,-, n! u'
• .1 .1ki triwiTi Ou Ou
= z•-•' i¿i " =n "
n E n- l)! • •
n E ((n. 7 1)! í • k) - Ir:11==y:: - 1::!:::
u`
-vliwkr):44.1
= n E (13!"-i (u)br+e1 ). ion-1
Hallando en forma análoga las derivadas parciales con respecto a v y w tenemos:
Ddb(ft) = n E (db1.44, + fb14.1.,)Br (fi)
y en términos del algoritmo de Casteljau podemos escribir:
Ddb(a) = E bl(d.)B?-1(fi›).
I4n-1
Ya que existe un isomorfismo entre Wiln y el espacio de matrices, esto nos permite dar la
siguiente definición:
Definición 4.5 Dada la matriz A = (a jj ) E Rmn una matriz de orden m x n La norma
de Hobenius de la matriz A se define como:
171
A ii= (EE' aii 12) • :=1j=1
4.1 Métodos de Renka y Cline
Dado el conjunto de puntos p = Ipi = (x 1 , yi), i E {l, 2, n}} con sus respectivos
valores de función interpolante. El objetivo principal es encontrar una función cuadrática
que aproxime las derivadas pardales z.,k , 2v, en el nodo k para utilizarlas como datos de
entrada para funciones de interpolación que requieran dichos datos y dicha función debe
interpolar. Por ejemplo para utilizar el método de Shepard S1, para calcular un spline
bicuadrático, etc., utilizamos aproximaciones de las derivadas parciales.
79

Para resolver dicho problema, Renka, plantea los siguientes métodos:
1. Interpolación mediante una función bicuadrática
Renka/Cline [3] plantean la función bicuadrática siguiente:
G(x, y) = zk a(z — zk )2 b(z — zi,)(y — yk) c(y — yk)2 + — =1,) + zwi (y — yk),
donde el vector desconocido es u = [a, b, e, zyk ] y 1c es un entero fijo, k E {1, ..., n},
Se comprueba facilmente que la función G va interpolar al nodo k, es decir:
G(x ;„ yk ) = zk , k = 1, , n.
Para este método, cuando decimos que interpola al nodo k no queremos decir que necesari-
amente la función G va a interpolar a 1( s otros nodos. Si queremos calcular una función
que interpole al nodo á diferente de k y calcule su gradiente tendremos que buscar una
nueva función G semejante a la función anterior pero ahora dependiendo del nodo i.
Ahora para hallar el vector desconocido u, Renka plantea el siguiente problema:
(.1 Minimizar E [tv1(x, y)(G(xj, yi) — zi )] 2
'Esi, donde jOky los tuj son funciones de pesos dados y Sk es un conjunto dado de vecinos
del nodo k. Por otro lado tenemos lo siguiente:
Teorema 4.3 Dada G, la función interpolante de Renka en el nodo (xk,yk),
j E {1, m}, rri es el número de vecinos del nodo k, m < n. Definimos la matriz A
cuya j-exima fila es de la forma:
xh)21 )(Yi Yk)wi, (yi Yk)2
wk)tuk, (Vi Vh)tuk,
y el vector columna t) de la forma:
toi(z4 — zj), j E {1,...,70.
Entonces se cumple que los dos problemas siguientes son equivalentes:
(P1) Minimizar E [tví (x , y)(G(x, , /fi) — zi )12, sEsk
(P2) Minimizar (Il Au — v112 ).
80

Prueba: Para los nodos (x j , yi), j = 1, . . m, tenemos:
G(x,,yí) — zj zj, — zj + a(xv — xk)2 + b(xi — xk)(yi — yk)
— 114)2 + zxh(oi ok) zyk(Yí — Yk)
G(xi, yj) — zi = —(z1 — + (141 — x4)2 + b(xj — xk)(yi — yk)
4-e(Yi — Yk)2 zok(zi — =k) zyk (Vi — yk)
Multiplicando por w1 tenemos
wi(G(x j , yi) — z1 ) = —wf(zi — + awi(xi — xk)2 + bwi(x j — x4)(yi — yk)
+cwi(lí Yk)2 tuiz=cx(i tli.í Zvb(YS yk),
j E {1, 2, , m}.
Ahora expresado matricialmente tenemos:
(G(zi )
w2(G(x2, y2)-z2)
u)3(G(x3, y3)-z5)
wm(G(=m, 7m)-zni)
((z1-3;k)2 , (x1-zk)(Y1-Y1), (711-yk)2, (xl-z4), (yryk))wi
((z2-°14)21 (z2-°k)(Y2-Y4), (y2-Y4)21 (=2-=k), (Y2-Yk))tu2
((x3-x02 )(z3-xh)(v3-vh), (v3-vh)2 , (xs-zk), (v3-w.))u)3
((x.-=k)21 (=m-x.4)(Ym-Y4), (y.-yh)2 , (zr.-=k), (yr.-yh))wf.
a
b
c
zsgh
Wi (Z1 - zk)
W2(2.2 - zk)
t/J3 (Z3 - zk)
— zk)
Reconociendo a la matriz A, u, y tenemos:
tui(G(zi, Yi) — zi)
w2(G(x2, Y2) — z2)
w3(G(x3, y3) — z3)
wm,(G(x„„ — z„,)
= Au — v
81

il Au — v112 = E[tui(G(xi , yi ) — zi)12 (Pa ) y (P2 ) son equivalentes j=1
Para el cálculo del interpolante y del gradiente en un nodo (fijo) del conjunto de datos n escogemos un subconjunto de rn elementos, rn < n. De acuerdo al valor de m que utilizamos, Renka. y Cline [3] recomiendan lo siguiente:
Si el número rn de nodos es de 3 ó 4 ó 5 elementos se utiliza el método de interpolación
lineal. Si el número de elementos tiene por lo menos 6 elementos se recomienda que se
utilice la función cuadrática G que hemos definido.
Ahora, para la elección de pesos se utilizará el siguiente criterio, recomendado por Franke y Nielsón[11]:
Para I3i := d((zi, ya ), (xk, yk)), la distancia del nodo k, i # k, definimos el peso tvi:
= (14— Di )+I(R4,Di ), donde 0,
Rk — Di si Di < Rk (Rk — D i)+ = O si Di > Rk
donde Rk es el radio del circul -, cuyo centro está en el nodo k, que será es-
cogido de acuerdo a un criterio dado. Para escoger Rk tenemos lo siguiente: Si
A k
k DiD 1 1
), < =R
= — R— > , R Di
1 1 ya que Rk — Di > 0 y I4Di > 0, A 0, Rk y 0. Ahora, como = — — — , entonces
A Rk a mayor distancia del punto p‘ al punto pk , i # k; el punto In tendrá menos influencia en
el cálculo de la derivada en el punto (xk, yk).
Para la elección de Rk, Renka y Cline [3] sugieren el siguiente criterio:
Criterio para la elección de Rk
Dados n datos, la distancia del nodo k al nodo á = d((x4, yk), yi)) , m < n. Para in > 9, escogemos D como la distancia del octavo nodo i más cercano al nodo k y
82

para N < 9, escogemos D como la distancia más lejana del nodo í al nodo k. Entonces
definimos 111, = d((xk , yh), (y,, ya)), la distancia del nodo k al nodo s, donde el nodo
y,) es el más cercano al nodo k, pero cuya distancia es más grande que D. Si tal
nodo no existe escogeremos arbitrariamente 14 = 2D.
Ahora trataremos de dos métodos desarrollados por Renka y Cline [2] para calcular
las derivadas parciales. que los llamaremos "Método global para calcular las derivadas
parciales de Renka y Cline" y 'Método local para calcular las derivadas pardales de Renka
y Cline"
El objetivo de ambos métodos en lo siguiente a estimar las derivadas en los nodos.
Ambos métodos envuelven un sistema iterativo lineal de ecuacionesy no requieren alma-
cenamiento del orden 2n ubicaciones, dados que existen 2n derivadas parciales
2. Método global para calcular las derivadas parciales de Renka y Cline.
Dados (xí, yí), i = 1 con su respectivo valor de función 4, nuestro objetivo es
encontrar aproximaciones para las derivadas parciales z,,„zy , i = 1, ... n en los nodos.
Nuestras incógnitas los representamos mediante el vector u tal que sus n primeras
componentes van a ser las derivadas pardales zz„ seguidas de las derivadas pardales
zy„ Ahora nuestro problema es calcular u, para esto Renka y Cline plantean el siguiente
objetivo: Calcular el valor de u que minimice la norma L2 de la curvatura linealizada del
interpolante F(x, y) sobre el casco convexo H.
Consideraremos la curvatura de F a ser la norma en L3 de las curvaturas k1 y k2 en las
direcciones de los ejes x e y respectivamente.
Hallaremos k1 y k2 utilizando las siguientes ecuaciones:Az = k -1 Bx
1+F:2 Fr Fy
F.F y 1 + Fy
Fx x Fx
Fzy Fyy , a = (114:2 4- F1)1/2, (4.1) donde A = B =
83

De estas ecuaciones planteadas se tiene los siguientes resultados. Inicialmente tenemos
A-1 Bx . Hallando la función inversa de A
A-1 = 1[1+ FI -F-F, a2
Fy 1 + .F?
y reemplazando loe datos en esta ultima ecuación tenemos:
kl = 1 (1 + — F.F yns, (1 + — F,F y F yy a Fx Fy Fxx ( 1 + nwx, —Fx Fv Fxy + (1+ F:)Fy y
Teniendo en cuenta las siguientes notaciones: E = 1 + F, F = FJv , G = 1 + F:, L = a-1 F„, M = a-141 , N = yy , EG — = 1+ n , a = a3k.
Calculamos el polinomio caracteristico:
— a(EN + GL — 2FM)a + (LN — M2 )(EG — F2 )a2 = O.
Reemplazando a = a3k tenemos:
k2a6 — ka4(EN + GL — 2FM) + (LN — M2 )a4 = O.
Dividiendo entre a2 resulta:
k2a2 — k(EN + GL — 2FM) + (LN — M2 ) = O,
k2(EG — F2 ) — k(EN + GL — 2FM) + (LN — M 2 ) = O.
El producto de las raíces será:
ki = (LN — M 2 )
ka EG — F2 • Para la semisuma de las raíces resulta
1 , 1 EN + GL —2FM ka) = 2 2 (EG F 2 ) •
Por otro lado, para obtener la curvatura linealizada nosotros asumimos que las derivadas
84

parciales son pequeñas y tomamos F-2, F72, y F,,F y iguales a cero. Para el caso particular
k = 1 vamos a hallar las curvaturas principales.
Reemplazando F¢ = 0, F.F y = 0, e, = O en la matriz A y en a ontenemos:
A= 1 + 02 O 1 O
[0 O 1 +02 1
A = I, I matriz identidad,
a = (1 + -I- 02)1P = 1 =-# a = 1.
Ahora como A = 1, a = 1, tenemos por (4.1):
F„„ Fay Ix = k-113= donde A = I, B = Fyy
kx = Bx = ik1 - B( = 0, esto significa que k 1 y k2 son autovalores de la
matriz B. Ahora veamos como se relaciona la norma de Frobenius de la matriz B con norma de
Frobenius de la matriz diagonal, cuyos elementos son los autovalores de B. Esto lo
enunciamos en el siguiente:
Teorema 4.4 Dados B, una matriz simétrica, y D una matriz diagonal que contiene los valores propios de B. Entonces la norma de Frobenius es igual a la norma de la matriz diagonal.
Ahora por el teorema anterior desde que B es una matriz simétrica, su norma de
Frobenius es igual a la norma de la matriz diagonal de sus valores propios, luego tenemos:
Asi podemos plantear nuestro objetivo es encontrar u E 112" que minimice la funcional
cuadrática:
q(u) = iff(Pl+ 2nv F: y )dH.
SS

y el interpolante puede ser escrito
2n
F(1, y) = E 14A(x, y) + E z&g,(z, y),
donde u = [ui] es el vector que contiene n las derivadas parciales con repecto a x seguida
de las n derivadas parciales con respecto a y en forma ordenada de acuerdo a los indices,
fi y gi son funciones parches apropiadas (funciones cardinal& de soporte local) Para
desarrollar el siguiente teorema previamente recordemos los siguientes conceptos:
Definición : Forma bilineal (ver Seymour Lipschutz [9])
Sea V un espacio vectorial de dimensión finita sobre un cuerpo k. Una forma bilineal
sobre V es una aplicación f : Vx V 1-4. k y satisface:
a) f(aui bu2, v) = af(ui, v) + bf(u2 , v)
b) f (u, avi bu2) = af (u, ) b f (u, v2 )
para todo a, b E fe, para todo 14,14 E V. Se dice que una forma bilineal es simétrica si
f(u, = f (v, u).
Teorema 4.5 Dados la funcional cuadrática 7(u) = fH (F1,„ + 2Fly ny )c1H y el in-2n
terpolante F(x, y) = E t4M:c, y) + E 4Mx, y), fí, g, funciones cardinales de soporte
compacto, y también la función bilineal simétrica
a(F, G) = f 11 ( &xGr , + 2 FnG.y + Fyi,G yy )cll 1 .
Entonces q(u) = a(F, F) = uT Au+bTu+c, donde u es un vector que contiene las derivadas
parciales z„„ seguidas de las derivadas pardales zy „
A;.1 = a(fí,h), bí = 2 E a(A,91 )zi> j=1
y c= a (E z,gi, E zi gi),
86

Prueba: 2n
Para F(x, y) = E 14 h(x, y) + E ziMx, y) tenemos:
2n F.(x, y) = E 14.his(x, y) + E zígía.(z, 11))
í=1 í=1 Fxr(x) y) = E u,A.,(x, y) + E zigi..(z, u),
j=i 2n
FYY (X> y) = E tlifí„(x, + E zigi„(x, Y).i=1 j=1
Denotando
al = E u¡A„„(z, Y), i=i
= E zigi..(z, Y)) j=1
bi = E u-ífígm(z, y),
E zigi„.(x, y), 5=1
el = E uiL„(z, y),í=1
e2 = E zigi„(z, y),
tenemos F.(z, y) = al + a2, , = b1 b2, Fvy(x, y) = ci y reemplazando
en q(u) resulta
q(u) = ¡H[(a1 + a2)2 + 2(b1 + b3)2 + (ci + c2)2.1c1H
q(u) = hila? + a22 + 2aia2 + 2bi + 4b1 b2 + 214 + ci + 2c1o, + 4dH
Agrupamos q de la siguiente manera
q(u) = fi,(4+ 2by + cy),:u/ + fH(2a1a2 + 4b1b3 2c1c2)c/H
+ f ff (al + 2b1 + c.22)dH.

Desarrollando cada sumando resulta que se cumple:
fH(cil + 2by + cDan fH(2ct1a2 + 4b1b2 + 2c1ca)rIH =
fH(al + 261+ )6111 = q(u) Au + br u + e
uTAu,
bTu, c
a(F, F)
Verifiquemos que se cumplen estas 3 igualdades relacionados con q. Desarrollemos uTAu =
{ U 1 U2 • • U2n
+ 2fiécrh,..11 + f2vr f1,vrdH . . • • •
fH(f.,.. + + Abyth,vv)d-li • • •
Ul
U2
U2n
fff frz f2,r,w 2f1"f2Nzli fl ,Ify f2f$,~ )(1/1
fi/ (heirss 2f2n,xy f2nray f2n,fir f2,spi )dH
Entonces uTAu ea: 2n 2n
E f + 2A,..vh,zy + Ayyfiwy) + E + 2A,, ,f2" + f‘,.v.f2,71,) + i=, fi i_] El
3,*
• • • + E f + + fin f2,,,n . Agrupando el primero, cuarto,t
séptimo,— sumandos resulta: f H ah el segundo, quinto, octavo,... sumandos resulta:
fif 214; el tercero, sexto, noveno,... sumandos resulta: fH En conclusión tendremos: uTAu = fff (ctl + 214
En forma análoga se comprueba que se verifica las dos igualdades restantes que conforman
los sumandos de q.
Teorema 4.6 Dado la funcional cuadrática q(u). El problema (P) Minimizar q(u) = f H(F2 2Fly F:p )dH tiene solución única.
Prueba:
Para demostrar que el problema de minimización de q(u) tiene solución única, dado que
88

la matriz es simetrica, es suficiente demostrar que la matriz A es definida positiva.
Eso mostramos, probado que F # O implica a(F, F) > O. Si a(F; F) > O
tenemos:
uTAu + bTu c > O y para u y —u se cumple:
uT itu > —bTu + c > O,
Y
y u#O
uTAu > bTu c > O.
Resulta: uTAu — c > bTu uTAu — c > —bTu luego se tiene: uTAu — c > Ibrul > O. Ahora
supongamos que exite u1 tal que u1TAu1 = O. Reemplazando en la última desigualdad
tendríamos c < O lo que no corresponde al signo de c, entonces necesariamc Ite se cumple
uTAu > O.
para u 0 O, luego tendríamos por definición que A es definida positiva.
Por otro lado lo que 1108 falta es demostrar que a(F, = O implica F = O.
Demostraremos alzando la equivalencia:
Para. a(F, F) = O f ff(F2 2P2o ni )dif = O F = O, F8, = O, Faq = O.
Como Fs. = O tenemos F.(x, y) = r(y)
=> F(r , y) = r(y)x (b(y)
Fy( 0 , y) = 1j(Y)1 + ny) Fvy(1, Y) = r ft(Y)0 95"(Y) = Ot Fwy(x) Y) = (Y) = r(y) = cl, rii(y) = O, q5"(y) = O
911(Y) = c, 95(y) = c2y c3
F(x, y) = + c2y + c3 cl , a2, c3 son constantes
F es una función lineal en H
Desde que A es independiente de los valores de los datos, sin perdida de generalidad
podemos asumir que z = O, í E {1, ..., n}. Entonces F tiene por lo menos tres ceros
89
......011111M=C

en H y por lo tanto es idénticamente cero. O
Desde que q con respecto a u. es cero obtenemos un sistema lineal de orden 2n:
2Au+b=0
donde A ea simétrica y definida positiva.
3. Método local de Renka jaine
Para tratar el 'método local de Renka y Chile para calcular las derivadas par-
ciales" previamente describiremJs el método de interpolación cúbica de Hermite (caso
particular).
Método de interpolación de Hermite:
Hermite a diferencia de Lagrange interpola con polinomios no sólo utilizando loe puntos
de datos, sino también con la información de la derivada de los datos. El caso que nos
interesa para entender el método local 2 de Renka y Cline es cuando tenemos 2 puntos
como datos y sus respectivas tangentes, esto es:
p(0) = po
P(0) rno
p(1) = pi
ib(1) = rni
El punto p podemos escribir en la forma cúbica de Bezier y sabemos que son determinados
por cuatro puntos bo, 61, b2, b3. Dos de loe puntee son determinados fácilmente bo = Po,
b3 = pi . Los otros dos puntos calculamos utilizando la definición de las derivadas en los
puntos finales de las curvas de Bezier:
/s(0) = 3ábo, á 3b2 5- S i = po + 1 rno, b2 = pl —
donde ábo = bl — b0. áb2 = b2 — bi.
Luego el interpolarte en la forma de Bezier ee dado por:
P(t) = Poin(t) + (Po + Irno) Bi(t) + — mi) in(t) + PI B1(1).
90

Agrupando tenemos la forma cardinal:
P(t) = PoHó(t) + ?no H l (t) miln(t) + Pt In (t).
donde 1/1(t) = /32,(t) BIt)
liNt) = -1-3-in(t)
111(t) = --1/11(t)
Hg(t) = B1(t) nt). Gráficamente tenemos:
En el método global 1 de Renka y Cline para calcular las derivadas parciales [31 de-
terminamos el valor de u al minir, izar la norma L3 de la curvatura linealizada del in-
terpolante F(z, y) sobr H y deducimos que encontramos u al minimizar la funcional
q(u) = fH(F1, + 2FIr + Fr2
p )dH , donde fi(z , y) = E u, f;(x, y) + E ;Mx, y) y las com-
ponentes de u en el método global de Renka y Chile Para el cálculo de las derivadas eran
los z.„ i E {1, , n}, seguidos de las zr,.
91

Ahora, en el método local de Renka. y Cfine para el cálculo de las derivadas que desarrol-
lamos, el vector u tendrá sólo dos componentes z.„ zyk , y encontraremos u al minimizar
la funcional qk(u) = fn(g2 2F" F:v )dH, donde Tk denota el parche del triángulo
conteniendo el nodo k. Luego, para hallar el minino en cada parche 71 k E {1, ..., I} se
podría plantear el siguiente sistema:
aq _ aqk _ o aq aqk _ o az, — az,„ [bu az»
ya que estamos utilizando condiciones necesarias de minimización en el triángulo Tk. Para
reducir el esfuerzo computacional, se introduce la siguiente aproximación de qh :
ijk va a ser la funcional cuadrática, definida por la suma de los cuadrados de la norma Ir2
de la curvatura lineal,ada de F a lo largo de los segmentos cuyos extremos son el nodo
kysuvecinoi i =1,...,m:
I
41(4 IV) = E I [47(012dt; t=1 o
donde t varia a lo largo de los segmentos, 14 es la longitud del nodo k al nodo í y 4n(t) es
la restricción del interpolarte F hacia el lado cuyos extremos son los nodos i y k.
4,, puede ser hallado usando los lí(t) como interpelantes cúbicos de Hermite, considerando
sus valores y derivadas direccionales de F en los extremos de los lados Li. Al reemplazar qk por qk se tiene la misma estructura asociada al "método local 1 de Renka
y Cline'. Para resolver el sistema de ecuaciones planteado, se emplea el método de Gauss-
Seidel con bloques de 2 por 2.
Para k = 1, , n, sea z,,„ y zi,, la solución del sistema:
aq 5i 0, .„ o az»
las componentes de z.,zy son dados en cada paso.
Como se tiene la misma estructura que el nt..1todo global para calcular las derivadas par-
ciales, se prueba que la solución es única, además el método de Gauss-Seidel que vamos a
utilizar para hallar la solución es un método convergente.
92

Mediante las rutinas de Renka [14], la subrutina GR.ADG estima el gradiente en loe nodos
utilizando el método local 2 de Renka/Cline tenemos el sigiente resultado,
z y z
2.5 6 1 —0.8659320 —1.32137
0 0 1 —0.071389 1.80535
3 4 3 —1.422887 —1.01657
2 3 5 —1.24743 0.144452
5 2 1 —0.908824 0.321953
Empleamos estos datos, graficaremos la función interpolante de Shepard Si debido a que
podemos utilizar de datos de entrada las derivadas parciales que hemos calculado por el
método de Renka/Cline para el calculo de las derivadas parciales. Esto lo mostramos en
la figura 4.1.
4.2 Método de Quak y Schumaker
Dado un subconjunto p = {(xí,14)}:1_, en R2 y sus correspondientes valores de función,
el objetivo es construir una función S que interpole dichos datos. Vamos a suponer que
están dados z,„ zv,), i e {l, n}. Previamente definimos la división de Clougth
Tocher en el triángulo Ti, i NT (PI
Definición 4.6 Dado el triángulo í E {11 ... I NT} y sus lados e1 , ea , e3. Conectando
el baricentrop4 con los tres vértices pi , P2, p3 se forman tres subtrííngulos, la división de
esta forma es referido usualmente como la división de Clough/Tocher.
Luego construiremos ulia función interpolante bicúbica Srí en C l (Ti ) que satisfaga las
condiciones
ST;(pi) = z, , DxST;(pf) zxi , D y STi (12j) = xrj , j E {1, 2, 3} (4.2)
y las condiciones adicionales para los polinomios que describen las derivadas direccionales
en la dirección normal de los lados e l , e3, e3 sean polinomios lineales y, si esto no es

lo
Figura
4.1:'
Punción de
Shépard
S1 con
dasós
del método local. 2 de
R2nlak
y
Cline
94

posible polinomios
cuádratícos.
Estas condiciones adicionales junto
con
lie ,
condiciones de interpolación dadas implican
que toda la superficie uniendo las piezas
Sri
es globalmente C' si satisface las condiciones (4.2), Vi E
{
1 ,
.
.
.
,
n}.
Ahora en la figura 4.2 siguiente mostramos el triángulo
Ti
de vértices
pi. ,
p2, p3 dividido
en tres
subtriángulos
y donde catan situados los coeficientes de
Bernatein/Bezier
que nos
serviran
para calcular la pieza
polinomial
p
qpi
q7;
se lee q restringido al triángulo
En el triángulo T, los coeficientes c13,
els,
c14 catan situados en
los
baricentros
de los
subtriángulos
15217494,
p1p4p3,
p2p4p3
respectivamente, y en forma trivial se puede demostrar
que dichos puntos donde catan situados dichos coeficientes, son
baricentros,
ya que existe
equidistancia en los coeficientes de cada lado de cada
subtriángulo.
95

PI -
CI
ce
e'9 P4
C17 C18
Ce CI4 C1), , '' -'''' s• ,,,,
C2 C7 C12 es
P2 P3
Figura 4.2: Split de Clough—Toclier
En el siguiente teorema hallamos las fórmulas de loe coeficientes ch c19 para
calcular el interpelante q sobre el triángulo Ti, mostrado en la Figura 4.2..
DO

Teorema 4.7 Sobre el triángulo Ti , el spline q tiene los titi guieUtes coeficientes de
Bernateán—Besier:
ci =
C2
Cg =
Z21
Zg,
C4 = ((z2 Z1)Zst + (Y2 — Y1)Zyt )/3 Zi,
C6 = ((24 Z1)Zet (y4 Y1)ZTI)/3 + Z11 C6 = ((`13 X1)Zzt + (Y3 — Y1)Zyi )/3 07 = ((x3 22)43 (y3 — Y2)21,3)/3 + Z2I Cg (( X 4 — Z3)41 + (Y4 — r2)ZY2)/3 2.2)
C9 = ((z1 22)Zx2 (111 112)52)/3 + Z2,
C10
e11
e12
=
=
=
((z1 r3 ) Z1111 + (Vi — Y3).51)/3 + z3,
((x4 — xl)zw: + (14 — 1/3)zy3)/3 + z3,
((x2 — x3)xx, (Y3 — 1/3)zy3)/3 + Z3)
C13 = (es c8+ (01 — 1)ei + (2 — 301)c4 + (301 — 1)c9 — Oic2)/2,
C14 = (e8 Cu + (02 — 1)C2 + (2 — 302)07 + (302 — 1)c12 02c3)/2,
Cig = (Cll + es + (03 — 1)c3 + (2 — 303)C10 + (303 — 1)C-8 03C1)/2,
C16 = (C15 + C5 + c13)/3>
C17 = + \ ‘C18 + C8 C1411 ->
CI8 = ( Cf• C15 + C17)13 )
e19 = (C1 + c2 + c3)/3,
Prueba:
donde (x4 - z1)(22 - xi) + (Y4 - Y')(y2 1/1) 91 — (x2 — r1)2 + (Y2 — Y1)2
92 — (z4 — 22)(23 — 12) + (y4 1312)(1/1 — 112)
(23 — 22)2 + (1/3 — Y2)2
Og
- (=4 - 23)(z1 - 23) + (y4 - y3)(y1 - y3)(z, - 23)2 + (y, - Y3)2
Consideramos primero la pieza polinomial p = gni 71,1 , es el subtriángulo de los vértices
97

/N,
pi , P2 en la figura 4.2
tnostrada.
La representación del
polinomio
esta dado por
p(r,s,t)
=
c16r3
3c i6r2s
3c17r2t
3c6rs2
+3c8rt2
c 1s3
3c4ts2
3c6st2
c2t3,
donde (r, s, t) son las coordenadas
baricéntricas
del punto (z, y) en el triángulo
Ti„
rela-
tivo a loe vértices p4 , p i , p2. Ahora calculemos los coeficientes del
subtriángulo
T,1 en el
siguiente orden
C4,
C15,
C9,
$ C13
C18, C171 C19
Primero identificaremos los coeficientes el, c2,
•
• •
,
els)
de la siguiente manera:
ei
=
baso
=
bo2i bi2o
=
es (4.3)
co
=
boi2 c13
=
bIll
11210
=
C16
C2
=
1003
C8
=
1102
C17
=
b201
C19
=
bsoo
Calculo de c4
Para encontrar
c.1
utilicemos la definición 4.3 para luego compararla con la definición
clásica de la
derivada
direccionaL
Calculemos la derivada
direcciond.
de p en la dirección
(r2
—
zi,y2
yl)
en el punto
(z
i ,
y1 ) en términos de los coeficientes de
Bemstein
y
Bezier:
Para la ubicación de los puntos tendremos en cuenta el sentido
antihorario
como muestra
la
siguie:ite
figura:
98

El Vector unitario de
(t2
zi
Y2
—
y1)
118tAt
dado por:
(z2
-
zblh
-
111) =
\i(z2
-
zi)2
(Y2
-
1/1)2
Hallando el vector a en coordenadas
barícéntricas
obtenemos:
)N, (x2
-
11)2
+
(1/2
-
yi)2'
A:7-
z1)3
+
(y2
-
y i )3
'
Haciendo I
=
V(.r2
-
x1)2
+
(y2
-
)2 y teniendo en cuenta que
7'1 +31
+t1
=
O, tenemos
- )zi
+
si z4
+
t1x2
=
z2
-
3:1
1/2
—
Y1
(-31
ti )yi
+ +
ti y2
=
1
,
(agrupando)
za
—
zi
(—z1 +x4)81
+
ti (X2
—
z1)
=
I
1/4)31
+
(y2
-
y i)
=
1/2
—
1/1
1
Luego por la regla de Cramer resulta:
(
X2
—
=1
1/2
—
Y1 r1
(zi,
y1)+311
(=4,
y4)+t1
(z2,
y2)
=
X2
—
21 1 z2 — z1
Y2
-
Y1
Ya
—
1/1 1 d.=
(o,
—11
,
=0 ti
=
1
- -
--
1
-
Si
=
El punto pi
=
(zi,
Yi)
en coordenadas
baiicéntricas
está dado por (0,1,0).
Utilizando la definición 4.4 se cumple:
Da
p()
=
n E
[db,
+
eb,+e3 +
f
Br
-1(~),
=
(u, v, w)
14-ai t
IA=tt-1
donde
n n!
•
•
Ert = 141
uí
=
71.-wc?`
t
u/s
99

kemplazando datos tenemos: a = , u = (0, 1, O), n = 3, tenemos:
I /0;7(11) = 3 E (ek+ + f B1 (u)ki=2
pV.9 3
7 E (—t.s...„, +1)4,j B!(0, 1, o)
37 E —v
7,+-1 i+j+k=2
Luezo tos sumandos e anulan a excepción de los correspondientes a
= 0, :t = 2. Luego tenemos:
3 í \ 2! Do _lit, 1/0.7 ( /-4 I = -oro 2,o)+0,1,o) + i>0,2,0+0,0,1)) —
2!
= -1,-b0 3 e + =
que es la derivada direccional en el punto (x1 ,11 1 ).
31c.< - ) Do../ = r---
V( (x2 — )2 + (12 — 1/1)
donde 11 = (0, 1,0) está identificado como el punto (x 4 ,y1 ).
le c en términos del gradiente tenemos
Di psü*4 - '1)z'1 +fv"
- =1)2 + (y2 -
donde 1. );p3 denota la derivada direccional en la dirección (z2 - - y!) en el punto
r 1 , ; R. Igualando y despejando tenemos:
c4 = — 11 =n — !)z.1 + (112 - til)zyd
krma análoga se calcula ch, ca, ca. Para el Cálculo de cv: Se calcula, la derivada en la dirección a = í z4 - zi , 4 - y!) en el punto p4:
f) 101) = Vi(X4 — X1)2 + (y4 Yi }2
ti = (1,0,0),
2 1 b, 1'ü
t4-13 ilj!k!
100

v en terminos del Iradiente por detinicion está dada por
_ (xs — =1 4- — D~pf itl
\Ar-4 — 11)2 4- (v4 —
donde:Dípii denota la derivada dírcccíoual en la. dirección (34 xi0/4 — Vi) en el punto
z.,; ) Igualan d o y despejando tenemos:
1:45 = 2%)2.-zi + (y, —
Cált:ulo de ,f:a y cg:
el punto p, la derivada direccional en la dirección
u — zt, yz — y;) de .Berusteín y Bezier está dada por
3(cs c2) D<zp(ii.) — 1= (0,0,1), — x,)2 +11» -- tk, 2
y en téyrninog del gradiente epté, dada por:
= (2'1 — x2).7.4 + (1/1 Y2)zy2
1(11 — 12)2 + — Y2)2
D.T t í 211 denota la derivada direccional en la dirección (zi — z2, Yi — y2) en el punto (z2, y2).
Igualando y despejando tenemos:
-1 rí = —
3 11
'21 — 112);c2 (ff t 1/2)Z721 z¿.
La derivada direccional a (4-.4 -- =1, y, — y.2) de Bernstein/Bezier .está dada por
DiP(21) u= (O,1, 0) v (zr2 — ;ya' t (.1/2 — ifl )2
eu vérininos del gradiente está dada por.
(x4 -- x2,
(1/4 — 112)712 = \4414 1'2)2 + (Y2 — Yi)2
lp,ualando y de.spejando tenemos:
3 ri( l'2)2Z2 (114 112)21,21 •

C.ICulti
de
6i cácelo de
ert
es un poco mas complejo y procedemos de la siguiente manera
De
id.
figura 4.2 vemos:
1)rlwiamente
recordemos la definición de proyección: Dados c y
g
definimos la
proywcion
dei vector de
3
sobre el vector
g:
Prowa
=
ilbii2b.
Clalcularemos
el
vector unitario
f/
en
la
dirección de la altura del lado
(Z2)
Y'3),
ver
fig-ura
4.2'1
Utilizando la definición de proyección tenemos:
r
-4
—
)
Pro-y(1,
-p,)
(P4
— ==
(p4
-
Pi)
+
14"4 tri
').(P2i2
P1
-
P2
)
(Pi
-
P2i)
(4.4)
-
102

Reemplazando en (4.4) tenemos:
n = [ - I
t4 - ZI Y4 —1%1) (24 — 21)(22 — 21) + (Y4 — YIXY2 — Yi) 22$ ) — (22 — 21)2 + (y2_ Yi)2
Y21 ,
= -d{(r4- yi)+
(x4 — ri (z2— zi)2 +
+ (Y3 — Yi
Y2 14), kz3 — 1/1)} • X* 2 — 21) (Y4 — Yi)(
Definimos
el = (z4 - =1)(z.2 Zi) + (Y4 — Y1)(Y2 — Y1)(z2 ri + (Y2 — Y1)2
[(24 — 21) — 01(22 — (y4 — — 042 — Yi)d d
Rallando n en coordenadas baricéntricas tenemos:
t', x,
+ si e4 yi y4 zy: [(z4 — z1 ) — 01(z2 — z1) — 111) — 91(1h —
) )
donde
rt + 3, + ti = O, (4.5)
?IX& + 21x4 tIZ2
nyi +31y4 + fly2
(z4 Z1) 01(Z2 Z1)
(y4 Yi) — 042 — in) d
(4.6)
(4.7)
(Reemplazando 4.5) en (4.6) y (4.7) tenemos:
(-31 — t1)Z1 51Z4 + ti Z2 = (3:4 °I) 91(Z2 — d
(—si — ti)Yi 4- siy4 + tiy2 = (y4 — Y1) — 042 — YI) d
Ordenando resulta:
02 a,(—x,+ 04) + tl(Z2 — zI) = (
04 — 01) 01( — 01)
(1/4 /11) — 042 — Vi)si (—y, + y4) + — 111)
entonces
103

Por la regla de Cramer encontramos si, s2, ti:
I (z4 -za-el(r2- x1) d
Z2 -
(Y4 — Yi) — 01(Y2 — d
1/2 - 1/I
Z4 - x1 Z2 - Z1
114 -111 112 — YI
Z4 - x1 Z2 - Zi
114 — Y1 112 1
- Z1 7:2 - Z1
7f4 - - 111
=
=
(Z4 - - 01(22 - Z3) d
(1/4 — — 042 — ri) d
Z4 I
X4 x1 Z9 - xi
114 -111 Ü2 — 11i
ti = ,
=4 — x1 (z4 — 91(x2 xi)
Y4 — Vi (Y4 — ) — 01 (Y2 — Y1)
274 ~ Z1 212 - xt
111 11'2 - 111
- (x2 —x1)
—91 02 — Y ) —01 , y como
Zt -r ▪ $1 _O1 01
tri =0
104

ti— =
Identificando los datos tendríamos:
— 1 7t2 = r2 =
= $1 =
= ti =
(ni, na, n1)
d
loe datos
n = 3,11 = (r, 8, t) = (O, 1 — 3, 8),
donde oi es un punto del lado Tii1r2 en coordenadas baricéntricaa. Calculamos Dnp(1):
Di,,p(t1) = 3 E ) 1 + (t9i k — . d +.1, d +c3 d i+0
ji1=2
f (0, — 1) o, 1 MÍO — 3)4 Pa-b(1) = 3 E d .1%-s2 dh:+4 i! j!k! 11=2
, (4.8)
105

4
Si i = O necesariamente se cumple:
j + k = 2
O 4- 2 = 2 (j, k) = (O, 2) J
1 + 1 = 2 (j,k) = (I, 11 2 + 0 = 2 (j, k) = (2, 0) =r =
Desarrollando (4.8) tenemos que Do(ii):
(i, j, k) = (O, O, 2), (i, j, k) = (O, 1, 1), (i, j, k) = (0, 2, 0).
1 (1 s) 3 1 () )
. 3.)032 d 3 [ Ibirr3 W 41 b (2) 1
b120(2)(1 — )20 + (61 — 1)/1030(1 8)2+d 2
+2( 0 1)120210 s y 31 + (el d— 1)b0
o arao
81 —
—1 bo0.311(1 — srs2 — - 12° bo12(1 — 3/13 d 2! d 2}
reemplazando en (4.3) resulta:
[1 2 2c133(1 — 3) 1 Dilp(ii) = 3 id
ess dc5(1 — s)2
+
(01 — 1)ces2
+ 1(01 — 1)c.4(1 — s)s + (0 — 1)(1 — s)2ci 01
c2(1 s2 +
2 1 — e9(1 — 8)3 — 7C4(1 — 3)21, (4.9)
donde des la distancia del punto p.1 el lado el y 01 definido en el teorema. El polinomio Ddp(1.1) se reduce a un polinomio de primer grado en s si y sólo si la segunda derivada de la expresión (4.9) vale cero en s, es decir
0 = — + 2cs + 2c i (01 — 1) + c4-201 —4(81 — 1)1+ +c,[401 + 2(01 — 1)] — 20101.
Despejando exs tenemos:
C33 = [ea + ea + (03 — 1)e3 + (2 — 303 )ea + (303 — 1)c9 — 93c2]/2.
106

Petra el
ciiicald
de
cle,
ei7
tenemos
CI6
Cr?
Estas
últimas expresiones se deben a. que se forman paralelogramos. Por ejemplo para
c.!_elsch3c il
forma un paralelogramo y justo el punto medio de las diagonales va ser el
punto medio del lado
clics,
y para el paralelogramo
e6c1Gezci6
justo
elpuuto
medio de las
diagonales
va a ser el punto medio de
c6c16
y de esta manera el punto ele es el
barimitro
de
i7s, C13.
En forma análoga se demuestra para c17. En forma análoga se calcula los
coeficie'ltes
para los otros
subtriángulos.
4,3
Método
bivariante
G2 de
Clough-Tocher
Dado un conjunto p
=
{pi
=
(xi, 2:
E
{
1,
,
n}} en R3 de puntos disipados,
ron sus respectivos valores de función
zi ,
gradientes
z.„
zy,
y su
Hessiano.
El objetivo
cs
construir un
interpolante
.9
:
R2
f--1
R con soporte local, compuesto por funciones
biquinticas,
de tal manera que la función sea de clase C2 sobre el casco convexo. Dados
lcx.3
vértices del triángulo, para construir dos lados de una división
minimal,
se triseca dos
ángulos con cuatro rayos y se escoge dos de est
,s
rayos que al
intersectarse
junto con
los dos
vértices
dados, formen un área mínima con los vértices correspondientes. De esta
manera podemos construir 6 lados.
Los otros 3 lados se formaron al unir los tres puntos de intersección que formaron el área
mínima.
.107

Figura 4.3: División minimal
Farin [8] muestra que una función interpolarte C2 no puede ser construído con una,
división minnnal de Claugh/Tochear. La dificultad puede ser la división de cada ángulo en
dos partes ya que para la construcción de la. función interpolarte C2 se requiere dividir
los angulos de los vertices del triángulo en tres partes.
Clongh/Tocher señalan que no se ha construído todavía un interpola,nte C2 con-
siderando una división minimaL
Más bien Clough-Tocher han considerado la doble división que lo definimos de la. siguiente
lob

manera: Primero dividimos el triángulo en tres subtriázigulos y cada subtriátigulo en tres
inicrotriáneulos. Así el triángulo es la unión de 9 tnicrotriánnlos,
No referimos a/ centro de gravedad como el bazicentro y a los centros de gravedad de los
isubtriánRulos como su subbaricentro.
B
A C
Figura 4.4: División doble de elougli--Tocher
1.khora en ta Fig. 4.5 en el triángulo i = 1, , n mostrarnos los coeficientes de Bernstein-
hezier que sirven para calcular la pieza polinomial quintica qi restringido a T.
109

Figura, 4.5: División doble de CkwgIr-Tocher y la red de B&iec para la con-
strucción de polinomios biquintícos
En la Fig. 4.5 el punto v4 es el baricentro del triángulo, y los punkm v1, vb,v7 son los
baricentras de loe subtriángulos formado por los vértices v•2, v3 ,v4; vi, v4 v3; vi , v4 , v2
re9pertivamente.

Teorema 4.8 Dados Jos vértices v1 ,02 , t?3 , v4 , vb , ve , V. Entonces se cumple:
Demostración:
4v4 — vi v5 = 3
4L/J4 — 113 4v4 — v2 v7 = 3 ve = 3 •
v4 + v2 + v3vs= 3 + v2+ v3v4 3
v2 = 314 — v1 — v3, v3 = 3v4 — — [v4 + (3v4 — — v3) + (3v4 — vs — v2)]
Vs = 7v4 — 3v4 — 4v4 — vi
3vs _ .
En forma análoga: 41)4 — v3 4v4 — v2
17=3
vs = 3Clough—Tocher requieren representar el interpolante biquintíco y la ubicación del punto
p, del triángulo, para eso generalizan la noción de coordenadas baricéntricas.
La localización de un punto general p en el triángulo es e; presado como: 7 7
p == E biv, bi = 1, i=1
(4.10)
donde los fn son fondones cardinales definidas sobre el triángulo en la triangulación, esto
es:
b,(1)i) = óij , 8 delta de Kronecker.
Fi interpolaste q restringido al triar gulo 71 es construido de la siguiente manera:
q(p) = E , 7 E ij = 5
5! 7 H
IN!) j=1
j=! (4.11)
donde cit,ís,í„,..,i, son loe coeficientes de Bernstein-Besier, donde el polinomio q restringido
al triángulo Ti es un polinomio biquintico. Por conveniencia consideramos = 1.
Esta formula es una generalización para calcular /(1) que estamos denotando como q(p)
111

donde u = , 1)7 ) tiene siete componentes y los son números reales. A difer-
encia de lo que normalmente es un vector diríamos que son números de control de la red
triangular de Bezier.
Similarmente el punto q y el interpelante en cada subtriángulo pueden ser representados.
Por ejemplo, para el 0147, obtenernos
b it), +64v4 + byu, E 5!
í+j+kwaS (i1jiii;°°"°Ablb«1414)
P
donde q(p) = (4.12)
La suma y el producto de las ecuaciones (4.10) y (4.11) indican que el triángulo ha sido
dividido en 7 subtriángulos.
En la ecuación (4.12); bi , b4, b7 son las coordenadas haricéntricas en el triángulo 1, 4, 7.
Expliquemos cómo loe cíooiook están identificados en el microtriángulo 1, 4, 7:
112
Corno í + j + kw- 5, i, j, k E Zt; tenemos:
j = 0 j= 1
i - O j+ k= 5 j= 2j =3 j = 4 j = 5 j = 0 j = 1
i =1 = j+k=4 j=2 j = 3 j = 4
j= 0
i = 2 j+k=3 j = 1j= 2 j = 3 j = 0
i = 3 = j + k = 2 j = 1
j = 2
i =4 j + k = 1 j = 0
_ j=1 i = 5 = j + k = O { j= 0
--> k= 5 k= 4 k= 3 k= 2
(O, 0, 5) (O, 1, 4) (0, 2, 3) (O, 3, 2)
--+ --->
--+ -->
--> ---> -->
--> k =1 --+ (O, 4,1) --> k= 0 --+ (O, 5, 0) ---+ k= 4 (1, 0, 4) --+ --> k = 3 --> (1, 1, 3) ---+ k= 2 -4 (1,2,2)-+ k=1 ---> (1, 3, 1) ---> k= 0 (1, 4, O)-4 --> k= 3 ---> (2, 0, 3) ---> k= 2 (21 1, 2) --+ --4 k=1 --> (2, 2, 1) --> k = 0 (2, 3, 0) --> -+ k = 2 --+ (3, 0, 2) -+ k=1 --+ (3, 1, 1) ----> k= 0 (3, 2, 0) --->
-4 k = 1 (4, O, 1)--+ ---> k= 0 --> (4, 1, O) --+ k= 0 --> (5, 0, 0) )
Debido al A147 los coeficientes de Bernstein-Bezier estarían identificados de la siguiente manera:
113

01004000
C003002
oosoim emano:,
00002003
01002002
02002001 03002000
00001004 C1001003 02001002 03001001 04001000
01000004 C2000003 C3000002 04000001 0600000
En forma análoga
ontenemos
los 8
microtriángulos
restantes.
Ahora contemos cuántos puntos de control de
Bézier
existen:
En cada
microtriángulo
existers
6 puntos interiores, lo que serian en 9 triángulos en
total 54, más 7 puntos en los vértices comunes a los
subtriángnlos
y 60 en los lados del
microtriángnlo
(sin considerar
nn
vértices en común) de tal manera que sumaria:
54+7+80= 121.
Ahora consideremos la ubicación del punto: El punto p en coordenadas
baricéntricas
generalizadas está dado por:
Primer paso: Calcular las coordenadas
baricéntricas
con respecto al triángulo, esto es:
p
bi vi
+
b-21r2
+
bsv3.
114

Sia {i;:7,1c} = {1,2,3} tal que bi = bi, bk1 El punto p pertenece al
subtriángulo vi, vk y v4. Entonces las coordenadas baricéntricas con respecto al
triángulo ai, ak y as están dadas por a4 = 3bi, al = bk bi y ak = bk — bi.
Segundo paso: Después repitiendo el paso 1 sobre el subtriángulo, ubicamos el mi-
crotriángulo que contenga p.
La explicación de esto es la siguiente:
115

P =— litif + i2v2-1-104;
P = b2v2 403, vi 4- 102 + va
P = I2v2 + pero 04 = 3 3
p = (11+-1-1vi+ 12+ 11) v2 + lava. 3 3 3
Comparando tenemos:
bi = +1 3
62 = 12 +
b3 = l3 13 = 363,
61 — b2 = 11 — = bi — 63,
= 152
Para este caso tenemos B3 = min{/31, B3}. Esto significa que i = 3 y j, k pueden tomar
los valores 1, 2.
VI + V2 4- V3
111
Capítulo 5
Evaluación Numérica
El objetivo del capítulo 5 es comparar los diferentes métodos de interpolación de-
sarrollados en loe capítulos
anteriores.
Inicialmente
comparamos
los métodos de
Shep-
ard
y Hardy,
luego
utilizaremos
loa
rutinas de
Renka
para encontrar la
triangulación
de
Thiessen,
y por ultimo, ya teniendo una
tríangulación,
interpolaremos mediante
*Tilines
lineales,
aiadráticos
y cúbicos que compararemos y
graficaremos.
5.1 Comparación entre los métodos de
Shepard
y de
Hardy
Los métodos de Interpolación de
Shepard
y Hardy son métodos globales debido a que
dado un conjunto de datos,
sienapre
vamos a plantear un sistema lineal de n
ecuaciones
con
n
incógnitas.
En cada ecuación interviene un solo dato. La curvas de nivel en
el
método
de Hardy son casi siempre ovaladas, en cambio en el método de
Shepard
no siempre lo
son. Cada función
interpolatnte
en los métodos dependerá del
parametro
q.
Spaeth
[13]
remuienda
los valores de q para el método de
Shepard
q
=
2, q
=
4, en ~lío en el
método de Hardy se tiene buenos resultados, para q
=
—112, q
=
112, q
=
—1. Daremos
algunos ejemplos gráficos variando el parámetro q:
117

1. Dado el siguiente conjunto de puntosgraficamos las %ademes interpolantes por les
métodos de Shepard y Hardypara q = 2 y q = -1.z1 = -10, z2 = -10, =3 = -10, X4 = -10, = -6, X6 = -6,
r7 = -6, re = -6, =9 = 4, zso = 4, r1 = 4, r13 =
215 = 10, X14 = 10, Zis = 10, r16 = 10.
yl = -10, y2 = -6, ys = 6, 114 = 10, y6 = -10, y6 = -6,
3/7 = 6, yta = 10, y9 = -10, yao = -6, = 6, yi2 = 10,
y13 = -10, y i4 = -6, ya6 = 6, ya6 = 10.
= = S, x3 = 5, x4 = 0, Xs = 5, xe = S, = 5, za = 5, Zg = 5, zao = 5, zia = 5, :12 = 5,
Z13 = 0, z14 = 5, z15 = 5, zis = 0.
En la siguiente mostramos solo dos graficas ya que cuando q = -1 la función es
inestable por el método de Shepard, y para el método de Hardy cuando g = 2.
Cuando q = -1, R = 1.4 el método de Hardy es estable y esto lo mostramos en la
figura 5.1.
cuando g = 2 el método de Shepard es estable, y esto lo mostramos en la figura 5.2
5.2 Triangulación mediante la rutina de Renka
Daremos dos ejemplos, uno utilizando el criterio lexicográfico del Max-Min (ver
Hosc:hek/Lasser [7]) y otro utilizando la triangulación de Thiessen, y para hallar dicha
triangulación utilizaremos las rutinas de Renka [14], y otro ejemplo usando los datos de
un ejemplo del capítulo 2 cuando triangulamos por el criterio lexicográfico del max-ruin.
para luego comparar con la triangulación de Thiessen.
1. Dados los puntos
= (51 9), P2 = (2, 5), P3 = (4, 2),
P4 = (71 1.5), P5 = (8.5, 4), 1743 = (5, 8)
118

Figura
5.11
likábdo
de Hardy, para
q=
-1
10
119
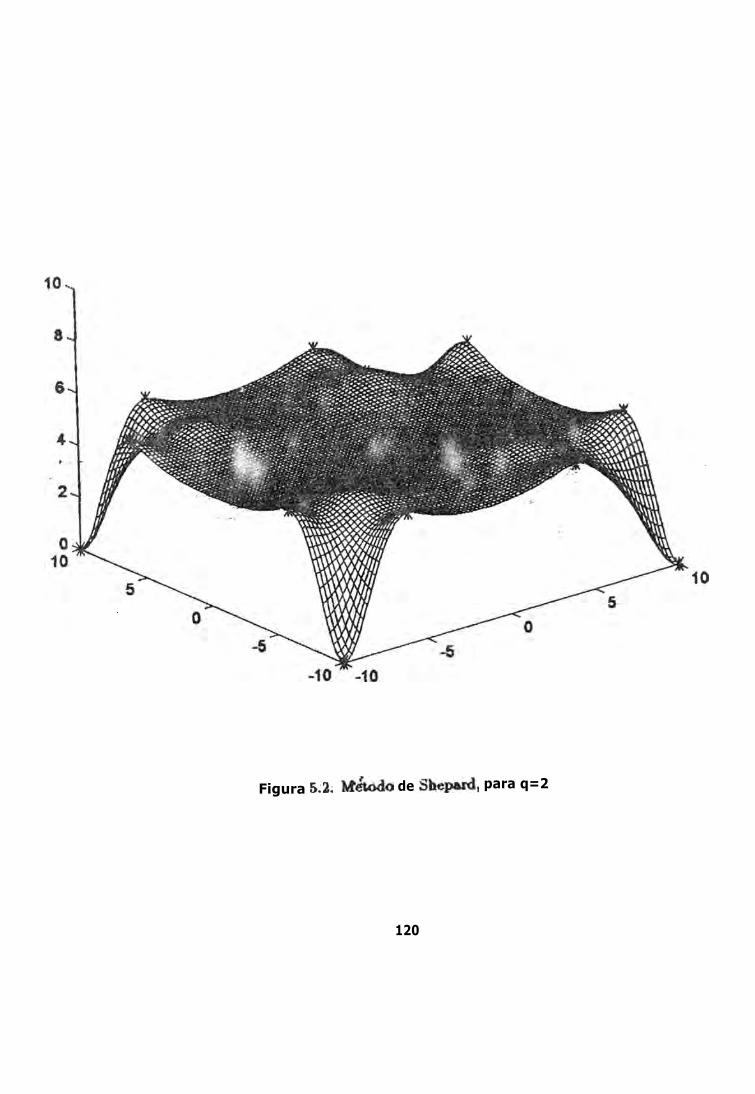
ío
Figura
5:42.
Método
de
Shepard,
para q=2
120
diztommil

2. Pr'=( -213)1 4-=:(11%), PSs -V2); pl= (0,0), p6 = (0,3)
En ambos casos buscamos una triangulación óptima.
Solución
1. Para el primer conjunto de 6 puntas tenemos diez posibles triangulacioner como lo
mostramos en la siguiente figura:
Por el criterio lexicográfico del max-min, los vectores asociados con esta triangulackl
son:
121

criterio — lexicograf i.4' :;c4 — mar — min
a(T1) = (0.04, 0.14.0.35, 0.46, 0.62)
a(r ) = (0.02, 0.04, 0.35, 0.46, 0.62)
a(T) = (0.02, 0.11, 0.42,0.46.0.50)
a(T4) = (0.04, 0.14, 0.35, 0.37, 0.66)
a(2"4) ----- (0.11, 0.14, 0.42, 0.46,0.62)
a(778) = (0.02, 0.11, 0.50, 0.58, 0.88)
a(r) = (0.11, 0.14, 0.37,0.42,0.66)
a(Ts) = (0.11, 0.14, 0.37, 0.46, 0.70)
a(r) = (0.11, 0.14, 0.57, 0.58, 0.70)
a(T10) = (0.11, 0.14, 0.58, 0.62, 0.88)
Comparando los vectores
a(T2) < a(V) < a(T6) < a(V) < a(Ti )
< a(T7) < a(716 ) < a(T6 ) < a(Te ) < a(T16 ),
Obtenemos por el criterio lexicográfico del max-min tenemos que 7" es mejor.
Ahora, usemos la subrutinas de Renka para encontrar una triangulación optima de
Thiessen. En estas subrutinas los datos de entrada son loe puntos E {1, n} y
de salida son los vectores lend, Iadj que se define'; de la siguiente manera:
Iadj: Es una. matriz ordenada que contiene prime.° los vecinos del nodo 1,los vecinas del
nodo 2, y asi sucesivamente hasta loe vecinos del nodo n. Esta lista ea modificada cuando
el nodo esta en la frontera del casco convexo anadiendo a este nodo un vecino ficticio que
es el vecino cero. El numero de las componentes de la matriz Iadj se calcula:
nc = 2*k+n,.,
donde k es el número de lados y rir es el número de nodos en la frontera del casco convexo.
Iend: Es de orden n y contiene los punteros finales de la lista adyacente modificada.
Veamos con este ejemplo como interpretamos /acij e 1 encl, para graficar la triangulación:
Tenemos los siguientes datos cuando procesamos el programa:
122

Vecinos de 1
Vecinos de 2
Vecinos de 3
Vecinos de 4
Vecinos de 5
Vecinos 8
1 2 3 4 5
ludí 2 6 5 0 3
IEND 6 6 7 1
1 4 8 0 9 4
2 8 10 5 11 6 12 2
3 13 13 0 14 5
4 16 15 3 16 0
5 21 17 1 18 6
6 25 19 3 20 4 21 0 22 1 23 2 24 3 25 5
Matrices lend y la4I
Figura 5.3:
En la tabla mostramos cuáles son los vecinos de cada nodo y si el nodo está en la
frontera del casco convexo. Por ejemplo: Como /end(1) = 4 se interpreta que sus vecinos
del nodo 1 son I ac(j(1) hasta 1ac{j(4) contando con el vecino ficticio, estos son los vecinos
del nodo 1, loe nodos 2, 6, 5 y dicho nodo está en la frontera del casco convexo ya
i23

que /adj(4) = O. Los vecinos del nodo 2 son loe 4 vecinos siguientes, es decir /adj(5)
hasta la4j(8), contando con sn vecino ficticio. En forma análoga encontramos para cada
nodo restante sus vecinos. De esta lista notamos que cinco nodos están en la frontera.
Graficando resulta la siguiente figura:
PI
Figura 5.4: Triangulación de Thiessen.
En el ejemplo comprobamos que la triangulación óptima por el Criterio Lexicográfico
del max-min coincide con la triangulación de Thiessen en la figura 5.4, pero no necesari-
amente la triangulación por el criterio lexicográfico va a coincidir con la triangulación de
Thiessen debido a que esta no es única.
2. Ejemplo: Mediante el paquete de Renka tenemos los siguientes resultados:
124
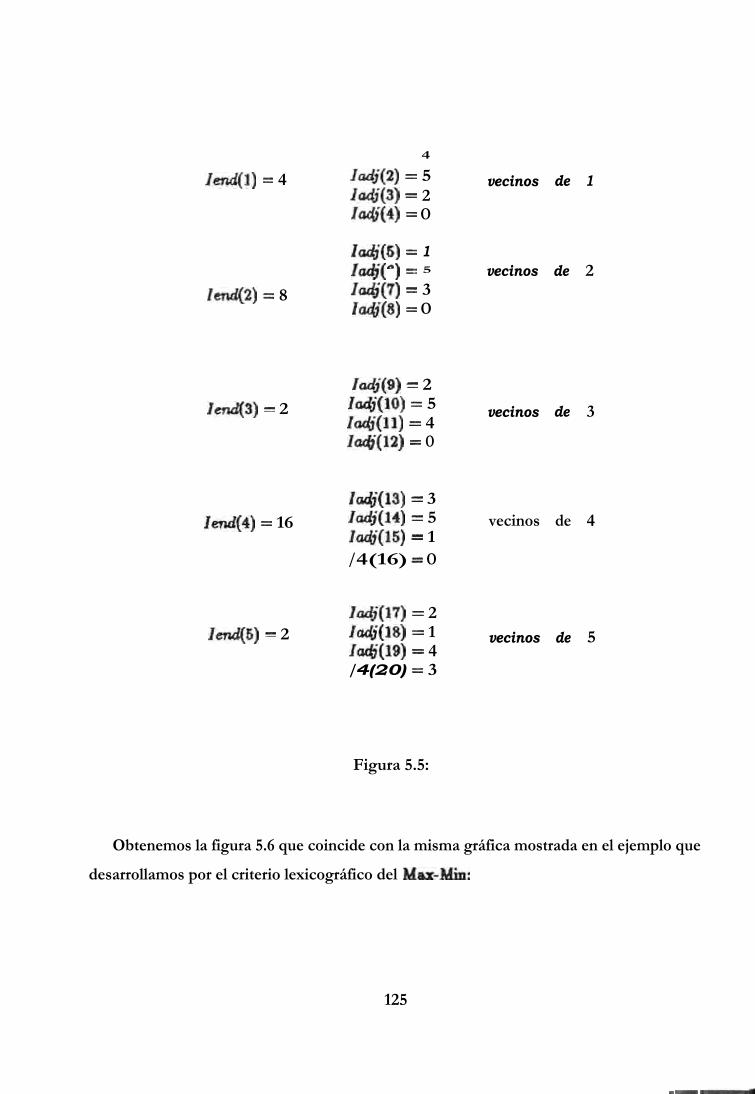
/end(1) = 4
lend(2) = 8
lend(3) = 2
/end(4) = 16
/end(5) = 2
4
ladj(2) = 5 ia4j(3) = 2 1o4j(4) = O
ladd(5) = 1 ladi(6 ) = 5 ladj(l) = 3 /adj(8) = O
ladj(9) = 2 /adj(10) = 5 /adj(11) = 4 lacjj(12) = O
/adj(13) = 3 /adj(14) = 5 /adj(15) = 1 /4(16) = O
ladj(17) = 2 /adj(18) = 1 lacij(19) = 4 /4(20) = 3
vecinos
vecinos
vecinos
vecinos
vecinos
de
de
de
de
de
1
2
3
4
5
Figura 5.5:
Obtenemos la figura 5.6 que coincide con la misma gráfica mostrada en el ejemplo que
desarrollamos por el criterio lexicográfico del Max-Min:
125
.~.11.~1~11

Triang& ación de Thiessen
Figura 5.6:
Una de las rutinas de Renka para Triangular es la rutina de Trmesh.
5.3 Comparación de los Métodos de Interpolación
por Splines bilineales, bicuadráticos, Bicúbicos
Dado loe siguientes puntos graficar (zi yi , zi) = (-2, 3, 3), (z2, y2, z2) = (1, 5, 4),
Y5, zs) (3, 2, 3), (z4, Y4, 24) (0, 0, 2), (Da) Y5) Z6) = (0, 3> 8)
sus spfines bilineales, bicuadráticos, bicábicos. Para graficar el apline bilineal, inicial-
mente tenemos que triangular. En el capítulo de triangulación se utilizaron estos datos,
de antemano obtuvimos la triangulación de Thiessen. Ahora sólo faltaría procesar datos
para bosquejar el interpolante. Para eso utilizamos la rutina IntercO. La gráfica de la in-
terpolación lineal se muestra así: Una parte de la gráfica de la interpolación bicuadrática
126
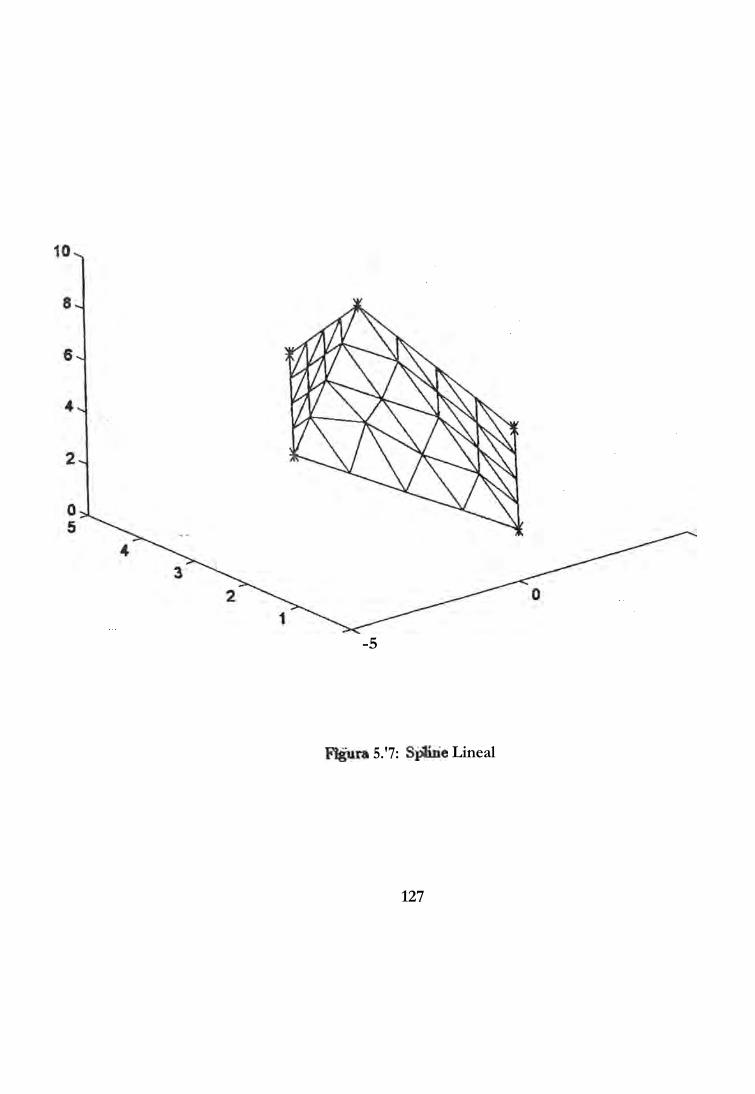
-5
Fláura
5.'7:
Splíne
Lineal
127

-5
Figura 5.7:
Splíne
Lineal
127

lo
Figura
5.8;
S
4ine
Bic.uadráttco
1211

lo
Figura 5.9:
Spiine
Bkálmeo
119
Bibliografía
[1]
Alfekl,
P.: A
bivariate
C2
Clongh
-
Tocher
scheme,
Computer
Aided
Geometric
Design
1, p. 257-267, 1984.
[2]
Cline,
A.;
Renka,
IL:
A
Triangle-Based
C'
Interpolation
method.
Rocky
Mountain
J.
Math.
14, p. 223-237, 1984.
[3]
Cline,
A.;
Renka,
R.: A
Storage-Efficient
Method
for
Construction
oí a
Thiessen
Triangulation,
Rocky
Mountain
J.
Math.
Vol. 14, N°1, 1984.
[4] De
Rose,
T.: Composing
Béxier
Simplexes,
ACM
Transaction
Graphics, Vol. 7, N°
3,
July
1988, pagel 198, 221.
[5]
Pranke,
R.:
Scattered
Data
Interpolation:
Tests
of
Some
Methods,
Math.
Comp. 38,
p. 181-200, 1982.
[6]
Farin,
G.: Curves
and
Surfaces
for Computer
Aided
Geometric
Design,
Third
Edition.
Academic
Press In; San Diego, 1992.
[7]
Hoschek,
J.; Lesser, D.:
Fundamentals
of
Computer
Aided
Geometric
Design,
A K
Petera, Ltd. 289 Linden
Steet
Wellesley,
Massachusetts, 1993.
[8]
Kincaid,
D.;
Cheney
W.: Análisis
Númerico.
Las
Matemáticas
del Cálculo
Científico.
The University oí Texas en Austin, 1994.
[9]
Lipschutz,
S.:
Algebra
Lineal, Series de Compendios
Schaum,
1968,
130
[10] Maus, A.: Deiannay Triangulation and the Convex Hull of n points in expected linear
time, Bit 24, p. 151,163, Norway, 1984.
[11) Nielson, G.; Pranke, Surface Constructiou &leed Upon TTiangulations, Computer
Aided Geometric Design, p. 163-167, 1983.
[121 Powell, M.; Sabin, M.: Piecewise Quadratic Approximations 023 Mangles, ACM
TOMS 4, vol.3, N°4, p 316-325, 1997.
[13] Spaeth, H.: Two Dimensional Spline Interpolation Algorithma, A. Petera, Weliealey,
1995.
Software:
[14] Rutinas de R.enka, R.: vea [131
131