unit 3 transformations/rigid...
TRANSCRIPT

1
Unit 3 – Transformations/Rigid Motions
Day Classwork Homework
Wednesday
9/27 Unit 2 Test
Thursday
9/28
Reflections, Rotations, Translations
in the Coordinate Plane
HW 3.1
Friday
9/29
Reflections, Rotations, Translations
in the Coordinate Plane
HW 3.1 (continued)
Monday
10/2
Reflections HW 3.2
Tuesday
10/3
Rotations
HW 3.3
Wednesday
10/4
Rotations
Unit 3 Quiz 1
HW 3.4
Thursday
10/5
Symmetry HW 3.5
Friday
10/6
Translations
Unit 3 Quiz 2
HW 3.6
Monday
10/9 No School
Tuesday
10/10
Translations
HW 3.7
Wednesday
10/11
Review
Unit 3 Quiz 3
Review Sheet
Thursday
10/12
Review Review Sheet
Friday
10/13 Unit 3 Test

2
CONGRUENCE TRANSFORMATIONS
A transformation 𝐹of the plane is a function that assigns to each point 𝑃 of the plane a unique point 𝐹(𝑃) in the
plane. Transformations that preserve lengths of segments and measures of angles are called basic rigid
motions. We call a figure that is about to undergo a transformation the pre-image while the figure that has
undergone the transformation is called the image.
Congruence Transformations Definition Example
Reflection
Translation
Rotation
Using the figures above, identify specific information needed to perform the rigid motion shown.
For a rotation, we need to know:
For a reflection, we need to know:
For a translation, we need to know:

3
TRANSFORMATIONS IN THE COORDINATE PLANE
A reflection or “flip” is a transformation in a line called the line of reflection. Each point of the pre-image
and its corresponding point on the image are the same distance from this line. Examples Triangle JKL has vertices J(0, 3), K(-2, -1), and L(-6, 1). Graph triangle JKL and its image in the given line.
a. x = -4 b. y = 2
Reflections Symbols Example
Reflection in the x-axis To reflect a point in the x-axis, multiply its y-coordinate by -1
Reflection in the y-axis To reflect a point in the y-axis, multiply its x-coordinate by -1.
Examples Graph each figure and its image under the given reflection.
a. ∆𝐴𝐵𝐶 with vertices A (-5, 3), B (2, 0), and C (1, 2) in the x-axis
b. ∆𝐴𝐵𝐶 in the y – axis.

4
Reflections
Symbols Example Reflection in the line y = x
To reflect a point in the line y = x, interchange the x and y
coordinates
Reflection in the line y = -x To reflect a point in the line y = -x, interchange and change the sign
of the x and y coordinates.
Examples
a. Quadrilateral JKLM has vertices J (2, 2), K (4, 1), L (3, -3), and M (0, -4). Graph JKLM and its image J’K’L’M’ in the line y = x.
A rotation or “turn” moves every point of a pre-image through a specified angle and direction about a fixed point. When a point is rotated a 90⁰, 180⁰, or 270⁰ counterclockwise about the origin, you can use the
following rules.
Rotations in the Coordinate Plane
Type of Rotation Symbols Examples
90⁰ Rotation
180⁰ Rotation
270⁰ Rotation

5
Examples Triangle PQR has vertices P(1, 1), Q (4, 5), and R (5, 1). Graph triangle PQR and its image after a rotation 90⁰ about the origin.
Parallelogram FGHJ has vertices F (2, 1), G (7, 1), H (6, -3), and J (1, -3). Graph FGHJ and its image after a rotation 180⁰ about the origin.
Triangle JKL has vertices J(3, -7), K (1, -1), and L (5, -3). Graph triangle JKL and its image after a rotation 270⁰ counterclockwise about the origin.

6
A slide is a transformation that moves all points of a figure the same distance in the same direction. Since vectors can be used to describe both distance and direction, vectors can be used to define translations.
Translation in the Coordinate Plane
Words Symbols Example To translate a point along vector <a, b>, add a to the x-coordinate
and b to the y-coordinate
Examples Graph each figure and its image along the given vector.
a. ∆𝐸𝐹𝐺 with vertices E (-7, -1), F (-4, -4), and G (-3, -1); <2, 5>
b. Square JKLM with vertices J (3, 4), K (5, 2), L (7, 4), and M (5, 6); <-3, -4>

7
REFLECTIONS
Construct the segment that represents the line of reflection
for quadrilateral 𝐴𝐵𝐶𝐷 and its image 𝐴′𝐵′𝐶′𝐷′.
What is true about each point on 𝐴𝐵𝐶𝐷 and its
corresponding point on 𝐴′𝐵′𝐶′𝐷′?
What term is used to describe the line of reflection? For a line 𝐿 in the plane, a reflection across 𝐿 is the transformation Λ𝐿 of the plane defined as follows:
1. For any point 𝑃 on the line 𝐿, Λ𝐿(𝑃) = 𝑃, and
2. For any point 𝑃 not on 𝐿, Λ𝐿(𝑃) is the point 𝑄 so that 𝐿 is the perpendicular bisector of the
segment 𝑃𝑄.
Constructing the line of reflection
Construct the line of reflection across which each image below was reflected.
1. 2.

8
Constructing an image under a given reflection
1. Construct circle 𝐶𝐴: center 𝐴, with radius such that the circle crosses 𝐷𝐸̅̅ ̅̅ at two points
(Label the points 𝐹 and 𝐺).
2. Construct circle 𝐶𝐹: center 𝐹, radius 𝐹𝐴̅̅ ̅̅ and circle 𝐶𝐺: center 𝐺, radius 𝐺𝐴̅̅ ̅̅ . Label the [unlabeled] point
of intersection between circles 𝐹 and 𝐺 as point 𝐴′. This is the reflection of vertex 𝐴 across 𝐷𝐸̅̅ ̅̅ .
3. Repeat steps 1 and 2 for vertices 𝐵 and 𝐶 to locate 𝐵′ and 𝐶′.
4. Connect 𝐴′, 𝐵′, and 𝐶′ to construct the reflected triangle.
Practice 1. Reflect 𝐴𝐵𝐶𝐷 across 𝐸𝐹̅̅ ̅̅ .
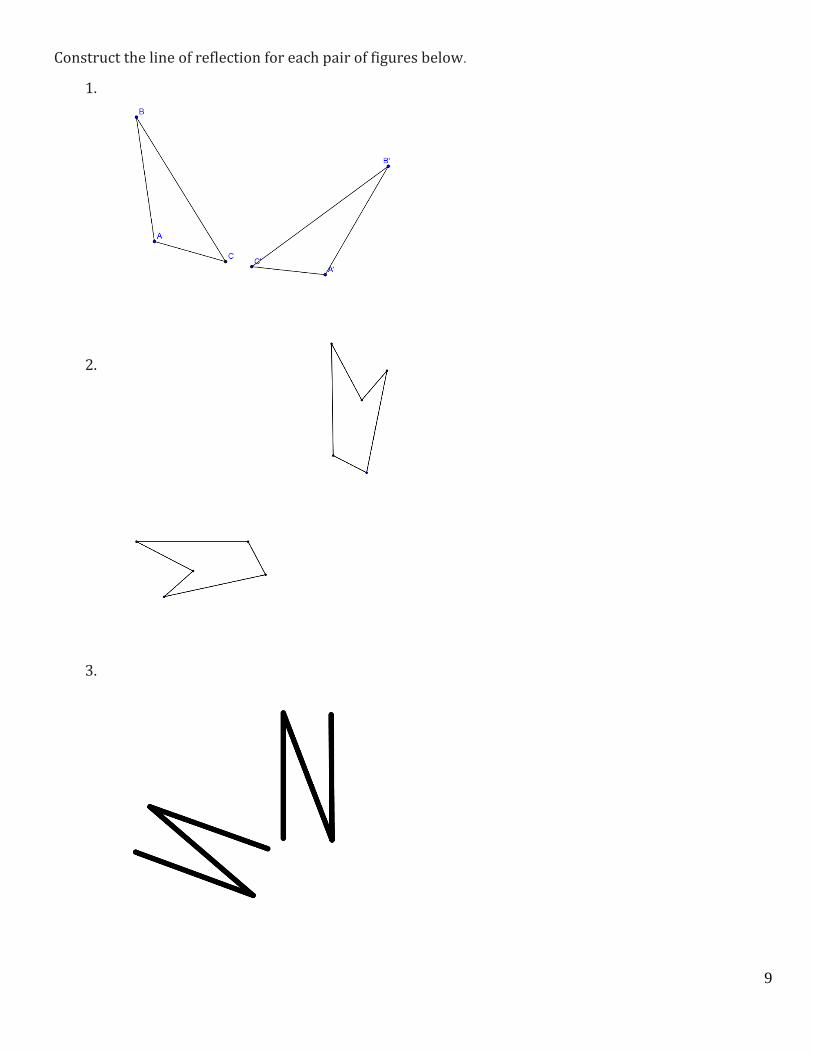
9
Construct the line of reflection for each pair of figures below.
1.
2.
3.

10
Reflect the given image across the line of reflection provided.
4.
5. Draw a triangle △ 𝐴𝐵𝐶. Draw a line 𝑙 through vertex 𝐶 so that it intersects the triangle at more than just the vertex. Construct the reflection across 𝑙.

11
ROTATIONS For 0˚ < 𝜃 < 180˚, the rotation of 𝜃 degrees around the center 𝐶 is the transformation 𝑅𝐶,𝜃 of the plane
defined as follows: 1. For the center point 𝐶, 𝑅𝐶,𝜃(𝐶) = 𝐶, and 2. For any other point 𝑃, 𝑅𝐶,𝜃(𝑃) is the point 𝑄 that lies in the counterclockwise half-plane of ray
𝐶𝑃⃑⃑⃑⃑ ⃑, such that 𝐶𝑄 = 𝐶𝑃 and ∠𝑃𝐶𝑄 = 𝜃˚. A rotation of 0˚ around the center 𝐶 is the identity transformation, i.e., for all points 𝐴 in the plane, it is the rotation defined by the equation 𝑅𝐶,0(𝐴) = 𝐴. A rotation of 180˚ around the center 𝐶 is the composition of two rotations of 90˚ around the center 𝐶. It is also the transformation that maps every point 𝑃 (other than 𝐶) to the other endpoint of the diameter of circle with center 𝐶 and radius 𝐶𝑃. Finding the angle and direction of rotation:
1. Find the measure of ∠𝐴𝐷′𝐴′.
b. What happened to ∠𝐷?
c. Find the measures of ∠𝐵𝐷′𝐵′ and ∠𝐶𝐷′𝐶′. What do you notice?
2. Find the angle and direction of rotation. Describe your process.

12
Finding the center of rotation.
1. Draw a segment connecting points 𝐴 and 𝐴′.
2. Using a compass and straightedge, find the perpendicular bisector of this segment.
3. Draw a segment connecting
points 𝐵 and 𝐵′.
4. Find the perpendicular bisector of this segment.
5. The point of intersection of the
two perpendicular bisectors is the center of rotation. Label this point 𝑃.
Justify your construction by measuring angles ∠𝐴𝑃𝐴’ and ∠𝐵𝑃𝐵’. Did you obtain the same measure? Exercises: Find the center of rotation and angle of rotation for each pair of figures below.
1. 2.
Lesson Summary:
A rotation maps segments onto segments of equal length.
A rotation maps angles onto angles of equal measure.

13
More Practice with Rotations
1. Rotate the triangle 𝐴𝐵𝐶 60° around point 𝐹 using a compass and straightedge only.
2. Rotate quadrilateral 𝐴𝐵𝐶𝐷 120° around point 𝐸 using a compass and straightedge.

14
3. On your paper, construct a 45° angle using a compass and straightedge. Rotate the angle 180° around its vertex, again using only a compass and straightedge. What figure have you formed, and what are its angles called?
4. Draw a triangle with angles 90°, 60°, and 30° using only a compass and straightedge. Locate the midpoint of the longest side using your compass. Rotate the triangle 180° around the midpoint of the longest side. What figure have you formed?

15
5. On your paper, construct an equilateral triangle. Locate the midpoint of one side using your compass. Rotate the triangle 180° around this midpoint. What figure have you formed?
6. Use the initials provided below. If you create your own WordArt initials, copy, paste, and rotate to create a design similar to the one below. Find the center of rotation and the angle of rotation for your rotation design.

16
SYMMETRY A figure has symmetry if there exists a rigid motion – reflection, translation, rotation, or glide-reflection –
that maps the figure onto itself. One type of symmetry is line symmetry.
Line Symmetry Words Example
A figure in the plane has line symmetry if the figure can be mapped onto itself by a reflection in a line, called a
line of symmetry.
Examples
Use your compass and straightedge to draw one line of symmetry on each figure below that has at least one line of symmetry. Then, sketch any remaining lines of symmetry that exist.
a. b. c.
d. e. f.
17
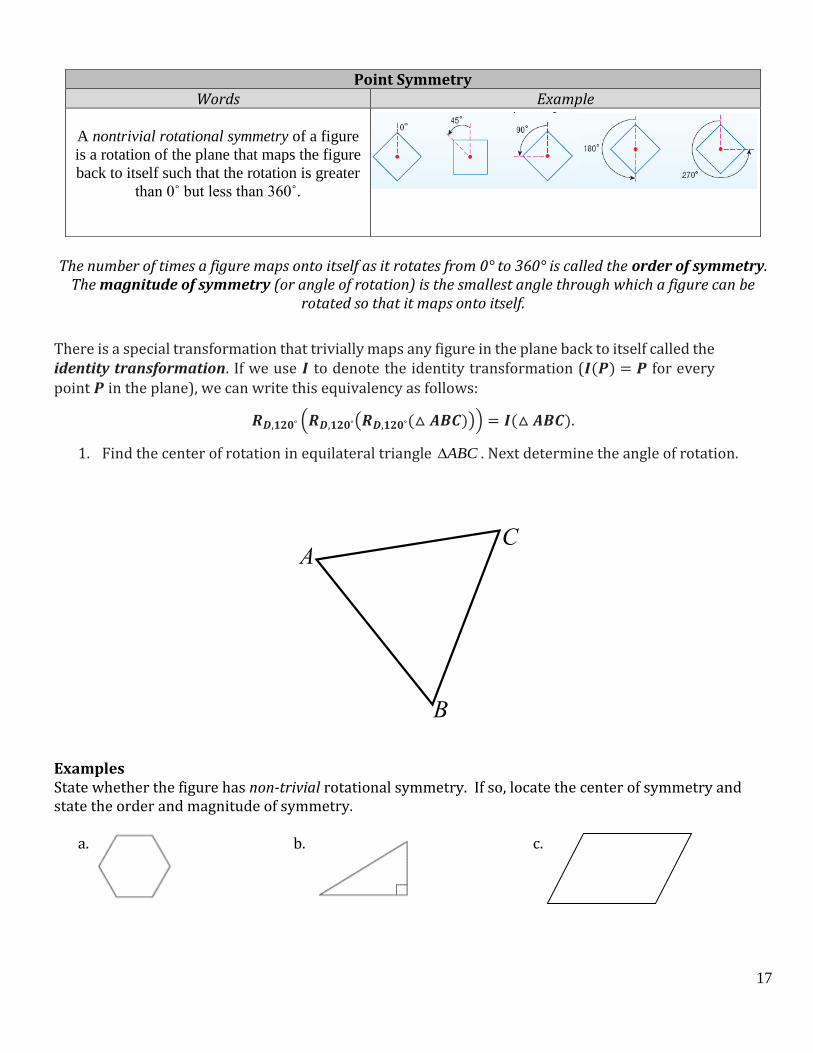
The number of times a figure maps onto itself as it rotates from 0° to 360° is called the order of symmetry.
The magnitude of symmetry (or angle of rotation) is the smallest angle through which a figure can be rotated so that it maps onto itself.
There is a special transformation that trivially maps any figure in the plane back to itself called the identity transformation. If we use 𝑰 to denote the identity transformation (𝑰(𝑷) = 𝑷 for every point 𝑷 in the plane), we can write this equivalency as follows:
𝑹𝑫,𝟏𝟐𝟎˚ (𝑹𝑫,𝟏𝟐𝟎˚(𝑹𝑫,𝟏𝟐𝟎˚(△ 𝑨𝑩𝑪))) = 𝑰(△ 𝑨𝑩𝑪).
1. Find the center of rotation in equilateral triangle ABC . Next determine the angle of rotation.
Examples State whether the figure has non-trivial rotational symmetry. If so, locate the center of symmetry and state the order and magnitude of symmetry.
a. b. c.
Point Symmetry Words Example
A nontrivial rotational symmetry of a figure
is a rotation of the plane that maps the figure
back to itself such that the rotation is greater
than 0˚ but less than 360˚.
A
B
C

18
Use the figure to answer the questions below.
1. Draw all lines of symmetry. Locate the center of rotational symmetry.
2. Describe all symmetries explicitly.
a. What kinds are there?
b. How many are rotations? (Include a “360˚ rotational symmetry,” i.e., the identity symmetry.)
c. How many are reflections?
3. Prove that you have found all possible symmetries.
a. How many places can vertex 𝐴 be moved to by some symmetry of the square that you have identified? (Note that the vertex to which you move 𝐴 by some specific symmetry is known as the image of 𝐴 under that symmetry. Did you remember the identity symmetry?)
b. For a given symmetry, if you know the image of 𝐴, how many possibilities exist for the image of 𝐵?
c. Verify that there is symmetry for all possible images of 𝐴 and 𝐵.
d. Using part (b), count the number of possible images of 𝐴 and 𝐵. This is the total number of symmetries of the square. Does your answer match up with the sum of the numbers from Problem 2b and 2c?
A B
CD

19
Use the figure to answer questions 4-6.
4. Draw all lines of symmetry. Locate the center of rotational symmetry.
5. Describe all symmetries explicitly.
a. What kinds are there?
b. How many are rotations (including the identity symmetry)?
c. How many are reflections?
6. Prove that you have found all possible symmetries.
a. How many places can vertex A be moved to by some symmetry of the pentagon? (Note that the vertex to which you move A by some specific symmetry is known as the image of A under that symmetry. Did you remember the identity symmetry?)
b. For a given symmetry, if you know the image of A, how many possibilities exist for the image of B?
c. Verify that there is symmetry for all possible images of A and B.
d. Using part (b), count the number of possible images of A and B. This is the total number of symmetries of the figure. Does your answer match up with the sum of the numbers from Problem 2b and 2c?
A
B
C
D
E

20
TRANSLATIONS Construct the line parallel to a given line 𝐴𝐵 through a given point 𝑃.
1. Draw circle 𝐶1: Center 𝑃, radius 𝐴𝐵. 2. Draw 𝐶2: Center 𝐵, radius 𝐴𝑃. 3. Label the intersection of C1 and C2 as 𝑄. 4. Draw 𝑃𝑄.
A translation is a transformation that moves all points of a figure the same distance in the same direction. Since vectors can be used to describe both distance and direction, vectors can be used to define translations.
For vector 𝐴𝐵⃑⃑⃑⃑ ⃑, the translation along 𝐴𝐵⃑⃑⃑⃑ ⃑ is the transformation 𝑇𝐴𝐵⃑⃑ ⃑⃑ ⃑ of the plane defined as follows:
1. For any point 𝑃 on the line 𝐿𝐴𝐵, T𝐴𝐵⃑⃑ ⃑⃑ ⃑(𝑃) is the point 𝑄 on 𝐿𝐴𝐵 so that 𝑃𝑄⃑⃑⃑⃑ ⃑ has the same length and
the same direction as 𝐴𝐵⃑⃑⃑⃑ ⃑, and
2. For any point 𝑃 not on 𝐿𝐴𝐵, T𝐴𝐵⃑⃑ ⃑⃑ ⃑(𝑃) is the point 𝑄 obtained as follows. Let 𝐿1 be the line passing
through 𝑃 and parallel to 𝐿𝐴𝐵. Let 𝐿2 be the line passing through 𝐵 and parallel to line 𝐿𝐴𝑃. The point 𝑄 is the intersection of 𝐿1 and 𝐿2.
lP
AB
A
B
P
In the figure to the right, quadrilateral 𝐴𝐵𝐶𝐷 has been translated the length and
direction of vector 𝐶𝐶′⃑⃑⃑⃑ ⃑⃑ . Notice that the distance and direction from each vertex
to its corresponding vertex on the image are identical to that of 𝐶𝐶′⃑⃑⃑⃑ ⃑⃑ .

21
A
B
P1
P2P3
1. Draw the vector that defines each translation below.
a. b. c.
2. Use your compass and straightedge to apply 𝑇𝐴𝐵⃑⃑ ⃑⃑ ⃑ to segment 𝑃1𝑃2.
3. Use your compass and straightedge to apply 𝑇𝐴𝐵⃑⃑ ⃑⃑ ⃑ to △ 𝑃1𝑃2𝑃3.
P1
P2
A B

22
P1
P2
AB
AB
4. Use your compass and straightedge to apply 𝑇𝐴𝐵⃑⃑ ⃑⃑ ⃑ to the circle below (center 𝑃1, radius 𝑃1𝑃2).
5. Use your compass and straightedge to apply 𝑇𝐴𝐵⃑⃑ ⃑⃑ ⃑ to the circle below.
Hint: You will need to first find the center of the circle.
Lesson Summary
A translation maps segments onto segments of equal length.
A translation maps angles onto angles of equal measure.